防空伺服系統中新型數字化檢測方法
2019-08-27 03:46:46楊文光張遠高吳紅霞
火力與指揮控制 2019年7期
楊文光,張遠高,吳紅霞,李 靜,原 鑒
(北方自動控制技術研究所,太原030006)
0 引言
跟蹤伺服系統是防空火控系統的重要分系統,其性能優劣對防空火控系統的綜合戰技指標有著至關重要的影響。跟蹤伺服系統的指標體系較復雜,從對防空火控系統的戰技指標影響程度來看,穩定精度、跟蹤精度、最大跟蹤角速度、最大跟蹤角加速度和最小平穩速度這5項指標是跟蹤伺服系統的重要指標,對以上5項技術指標的檢測,業內也形成了一套成熟的傳統檢測方法[1-3]。
然而,跟蹤伺服系統的傳統檢測方法也存在著檢測設備及檢測方法復雜和引入人為讀數誤差影響測試結果等弊端。比如:在測試穩定精度指標時,需要依托自準直光管與平面反射鏡形成的光路,首先自準直光管是一套較為復雜的光學設備,平時需要維護和保養,其次在每次檢測前需要調整光路,對于沒有經驗的操作人員來說調整光路需要耗費大量時間;其次,在檢測過程中需要人為讀數,檢測人員需通過肉眼觀察并對比光學分劃與十字光斑的位置偏差進行讀數,由于這是一個動態過程,十字光斑有時跳動非常快,不同的檢測人員讀數偏差很大。再如,最小平穩速度指標的傳統檢測方法也面臨同樣的弊端,檢測人員需要目視激光點跡的運行軌跡人為判定是否平穩,主觀因素過大。為此,需要研究一套新型的、便捷的、定量化的測試方法。好在跟蹤伺服系統數字化程度的提高,為其重要指標檢測方法的數字化、便捷化、定量化改進提供了必要條件[4-6]。
1 重要指標分析
1.1 重要指標特性分析
前文提到跟蹤伺服系統有五大重要指標,分別是:穩定精度、跟蹤精度、最大跟蹤角速度、最大跟蹤角加速度和最小平穩速度。就目前的防空火控系統發展趨勢而言,彈炮結合式火控系統已經成為主流,也就是說自行式防空系統將逐漸取代陣地式防空系統;就防空火控系統的應用而言,陸軍防空部隊將更多地參與伴隨防空任務,因此,防空火控系統對行進間的跟瞄、打擊能力的要求也越來越高。對跟蹤伺服系統穩定精度指標的要求也日趨提升,穩定精度是指當載體姿態發生變化時(如角度、速度等),跟蹤伺服系統維持原狀態的能力與度量,通常為角度或角速度。跟蹤伺服系統的穩定精度直接反映防空火控系統在運動過程中對目標保持自動瞄準的能力,直接影響到防空火控系統行進間的射擊精度和射擊反應時間。
當前,防空火控系統面對的打擊目標更多地強調“低、慢、小”特點,目標機動性越來越高,跟蹤伺服系統的跟蹤能力將扮演更為重要的角色。通常來說,跟蹤伺服系統的跟蹤精度同最大跟蹤角速度、最大跟蹤角加速度這3項指標,共同評價防空火控系統的自動跟蹤能力。跟蹤精度是指跟蹤伺服系統在跟蹤過程中,目標在大地空間的真實位置同跟蹤伺服系統回轉中心連線與目標視線即瞄線之間的角誤差。跟蹤精度直接反映防空火控系統的自動跟蹤能力,該項指標的優劣直接影響防空火控系統獲取現在點的準確性。最大跟蹤角速度和最大跟蹤角加速度,是指跟蹤伺服系統在滿足跟蹤精度條件下所能達到的最大角速度或角加速度。一般來說,該項指標應該在跟蹤伺服系統保證精度的條件下測得,也是反映防空火控系統跟蹤能力的重要指標。
最小平穩速度是指跟蹤伺服系統在滿足跟蹤精度條件下所能達到的最小角速度。該項技術指標更多地強調平穩能力,防空火控系統在自動跟蹤工況下,當目標距離較遠時,其跟蹤角速度非常小,此時跟蹤伺服系統不應抖動或爬行,否則會影響CCD成像質量和測距精度。最小平穩速度是影響防空火控系統探測能力的重要技術指標[7-9]。
1.2 重要指標檢測原理分析
跟蹤伺服系統的有限帶寬是產生穩定誤差的主要原因,穩定誤差會引起瞄線的跳動,因此,檢測穩定精度本質就是檢測跟蹤伺服系統瞄線的跳動量。穩定精度檢測原理示意圖如圖1所示,假設存在一個與跟蹤伺服系統剛性固連的反射鏡能夠直接反應瞄線位置,α角的1/2倍就是跟蹤伺服系統穩定誤差。
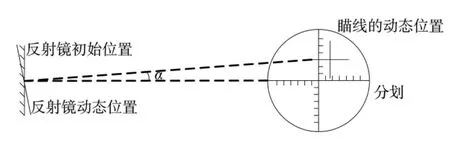
圖1 穩定精度檢測原理示意圖
檢測跟蹤精度的本質是檢測瞄線指向位置和真實目標位置的偏差,如圖2所示,在顯示跟蹤視頻中,視場中心可以等效為瞄線的指向,提取目標與視場中心的偏差Δx和Δy,即為跟蹤伺服系統跟蹤誤差。
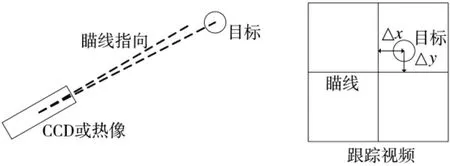
圖2 跟蹤精度檢測原理示意圖
最大跟蹤角速度的檢測是通過計算單位時間內轉動的角度來間接獲取的,同理,最大跟蹤角加速度可以通過計算單位時間內轉動的角速度變化來間接獲取。前文中提到最小平穩速度應突出其平穩能力,因此,對該項指標的檢測著眼點應是平穩。
1.3 重要指標傳統檢測方法
穩定精度的傳統檢測方法叫直接光點反射法。如圖3所示,首先將跟蹤伺服系統固定在三軸搖擺臺(或角振動臺)上,在跟蹤伺服系統上固定一片平面反射鏡,在檢測前將二者進行初始對準,以便使自準直光管與反射鏡準直。然后操縱三軸搖擺臺(或角振動臺)按專用規范規定的頻率和振幅作正弦振動,振動過程中記錄自準直光管分劃和出射反射鏡的光束偏差。
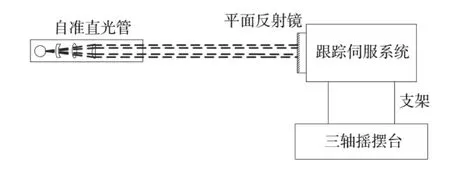
圖3 穩定精度檢測方法示意圖
按式(1)進行數據處理。可得到跟蹤伺服系統穩定精度。

式中,σ為瞄準線穩定準確度,單位為毫弧度(mrad);a為方位偏差,單位為毫弧度(mrad);b為俯仰偏差,單位為毫弧度(mrad)。
關于跟蹤伺服系統跟蹤精度的傳統檢測方法較多,這里引用偏差提取法,首先將跟蹤伺服系統固定在三軸轉臺上,平臺系統進入跟蹤模式并跟蹤靜態目標,啟動三軸轉臺并按專用規范規定的頻率和振幅運行,跟蹤過程中記錄跟蹤伺服系統視頻輸出偏差信息(像素數)。最后對記錄的偏差依照式(2)作數據處理。

式中,β為瞄準線跟蹤精度,單位為毫弧度(mrad);p為輸出偏差,均方根值。
跟蹤伺服系統最大跟蹤角速度和最大跟蹤角加速度的檢測方法是,通過伺服控制計算機給穩定平臺輸入最大角速度或角加速度控制指令,并記錄轉動角度及轉動時間,按式(3)和式(4)計算,其中式(3)用于計算最大跟蹤角速度,式(4)用于計算最大跟蹤角加速度。


式中,ωmax為最大角速度,單位為度每秒(°/s);εmax為最大角加速度,單位為度每秒平方(°/s2)。αi+、αi-為第i次的正轉、反轉的轉角,單位為度(°);ti+、ti-為第i次的正轉、反轉的轉角對應的時間,單位為秒(s)。
通常情況下,跟蹤伺服系統最小平穩速度采用直視法,將被試品的輸出軸中心置于試驗球幕的球心,激光指示器平穩安裝于跟蹤伺服系統的輸出軸上,激光光點指向半徑不小于5 m的球形墻幕。由信號發生器輸入技術條件要求的最低角速度信號。系統穩態跟蹤后,目視激光點跡,不應有抖動、步進現象。
2 跟蹤伺服系統新型數字化檢測方法
2.1 跟蹤伺服系統傳統檢測方法的不足
跟蹤伺服系統傳統檢測方法有4點不足之處。首先,測試設備復雜,檢測方法不易上手,主要表現在穩定精度的檢測方法上,在檢測準備階段不僅需要配備例如自準直光管這樣的光學設備,還需要進行光路的初始對準,這個階段會帶來人力和時間的大量耗費。其次,檢測方法不便捷,特別是跟蹤精度的檢測任務周期較長,伴隨于分系統調試和全系統聯調兩個階段,每次檢測都進行一次跟蹤伺服系統上下三軸搖擺臺的拆裝,這樣的檢測方法非常不便捷。再次,會引入人為讀數誤差,檢測穩定精度和最小平穩速度都需要進行目視,特別是穩定精度的檢測是一個動態過程,瞄線的跳動速度很快,這樣引入的人為讀數誤差非常大。最后就是檢測嚴謹程度欠缺,最大跟蹤角速度和最大跟蹤角加速度的檢測前提應是滿足跟蹤精度,但是傳統檢測方法未體現需滿足跟蹤精度這個前提,嚴格意義上講,傳統檢測方法僅表征跟蹤伺服的輸出能力不能完全表征跟蹤能力,此外,最小平穩速度的檢測通過人的主觀因素判定是否平穩也不夠嚴謹。
隨著跟蹤伺服系統數字化程度的提高,其內部數據交互大都采用總線式傳輸,各傳感器的信息采集和記錄便捷而準確,為跟蹤伺服系統開展重要指標的數字化檢測方法研究提供了必要條件。跟蹤伺服系統的重要指標數字化檢測方法將據此展開研究,來提升檢測方法的科學性、便捷性、嚴謹性。
2.2 新型數字化檢測方法的原理
對于穩定精度的檢測,利用雙軸光纖陀螺完成。當跟蹤伺服系統在隨三軸搖擺臺振動時,實時采集雙軸光纖陀螺每一瞬時的高低、方位角速度值ωx和ωy,并進行實時梯形數值積分,求出每一瞬時瞄線的高低、方位偏差值:
以上數據的集合構成偏差曲線,如果對偏差曲線利用最小二乘法進行曲線擬合,可以求出漂移曲線,偏差曲線如圖4所示。一般來說,兩個相鄰的波峰和波谷的縱坐標差就是該時刻的穩定精度。
對于跟蹤精度的檢測,需利用目標真值生成的模擬航路,模擬航路是一組單位時刻對應位置值的集合:

通過對每一時刻模擬航路真實位置和瞄線指向位置作差得到跟蹤誤差,一般來說,跟蹤誤差通過系統誤差和隨機誤差兩項指標約束。
對于最大跟蹤速度和最大跟蹤加速度的檢測也需要基于模擬航路進行,只是模擬航路對應的真值是一組正弦值,在滿足跟蹤精度的情況下,檢測其最大跟蹤速度或最大跟蹤角加速度。
最小平穩速度的檢測引入低速示性數概念,可提升該項指標的嚴謹性。低速示性數采用式(5)得到:

式中,η為低速示性數;ωL為最低角速度,單位為度/秒(°/s);n為過“零”的次數;ΔT為采樣周期,s;R(i)為第i個時刻跟蹤伺服系統接收輸入量的二進制碼值,bit;C(i)為第i個時刻跟蹤伺服系統的輸出量二進制碼值,bit;
可見,當跟蹤伺服系統按最小速度進行自動跟蹤時,如果運行非常平穩,其低速示性數會趨于零,而平穩性不理想時,低速示性數會變得很大。
2.3 新型數字化檢測方法
2.3.1穩定精度數字化檢測方法
首先,將跟蹤伺服系統進行穩定回路標定;其次,跟蹤伺服系統固定在三軸搖擺臺上,按專用規范的頻率和振幅作正弦振動,同時通過通用總線采集設備,采集來自跟蹤伺服系統的穩定回路解調濾波級輸出數據,將來自俯仰通道的數據記為ωx,來自方位通道的數據記為ωy,同時記錄俯仰角數據為θf。
然后,按照式(6)~式(8)進行數據處理。
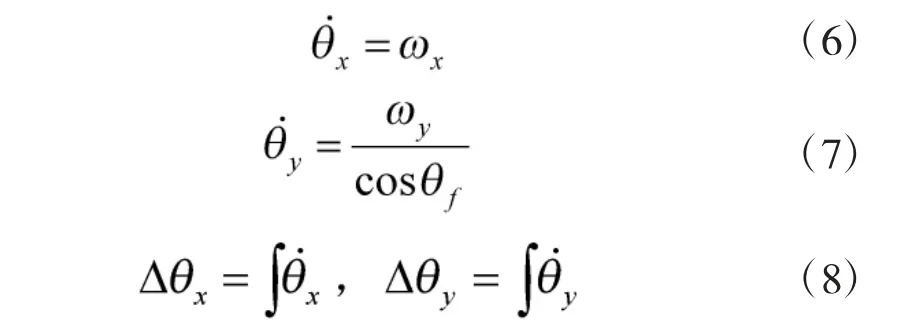
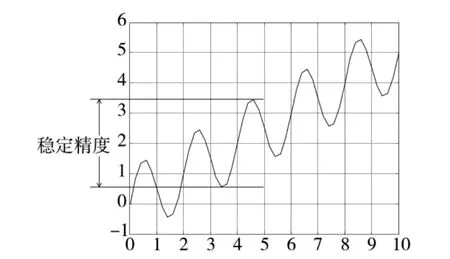
圖5 穩定精度測試曲線示意圖
可以看出,相對傳統檢測方法來說,操作步驟大大簡化;所有數據采用曲線方式輸出,更加直觀和精準。
2.3.2跟蹤精度數字化檢測方法
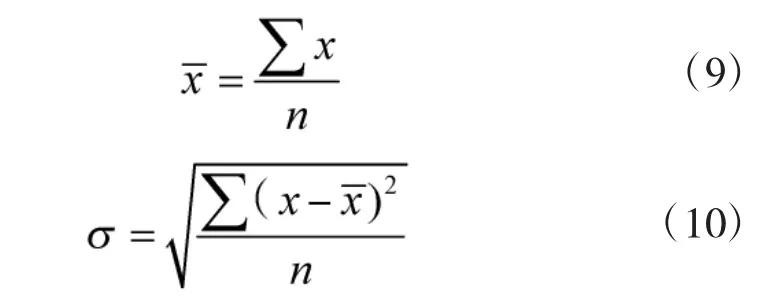
跟蹤精度檢測采用模擬航路檢測法。通過模擬航路的真值,同跟蹤伺服系統的位置量做差處理得到取差量Δx、Δy,并將該取差量Δx、Δy傳遞給跟蹤伺服系統,實現模擬航路跟蹤。其步驟如下:首先,將跟蹤伺服系統的自動跟蹤回路進行標定,然后依據模擬航路進行自動跟蹤,在模擬跟蹤的過程中利用通用總線采集設備,采集來自跟蹤伺服系統的跟蹤回路取差量輸出Δx、Δy,通過對全航路取差量Δx、Δy的過航前部分進行數據處理得到跟蹤精度,進行均值處理后的值作為跟蹤精度的系統誤差,如式(9),進行均方差處理后的值作為跟蹤精度的隨機誤差σ,如式(10)。
2.3.3最大跟蹤角速度及角加速度數字化檢測方法
由于跟蹤伺服系統的最大角速度和角加速度指標要求越來越高,對有限角的跟蹤伺服系統來說,倘若給定恒定速度或加速度,有可能出現未達到最大速度或最大加速度轉臺就已到限位的情況。因此,本技術指標的檢測方法較傳統檢測方法變化較大。跟蹤伺服系統的最大跟蹤角速度和最大跟蹤角加速度這兩項指標檢測方法相同,其檢測原理及方法如下:

2.3.4最小平穩速度數字化檢測方法
最小平穩速度測試步驟如下,由操作控制臺輸入技術條件要求的ωL(最低角速度)信號,當跟蹤伺服系統穩態跟蹤后,由通用總線采集設備采集速度輸出數據;依據式(5)計算系統低速示性數,并進行數據處理。
3 檢測數據對比
對傳統檢測方法和新型數字化檢測方法進行了對比檢測。首先利用新型數字化檢測方法和傳統檢測方法對穩定精度指標進行了3次測試,測試結果見表1。可見,傳統檢測方式由于是人為讀數,數據較離散,新型數字化檢測方法獲取的數據更精準,同時能夠提升分辨率,按照自準直光管的刻度讀數,其分辨率僅能達到0.1 mil,而新型數字化檢測方法數據分辨率至少可達0.01 mil,表中數據最后一位有效數字是估計值。
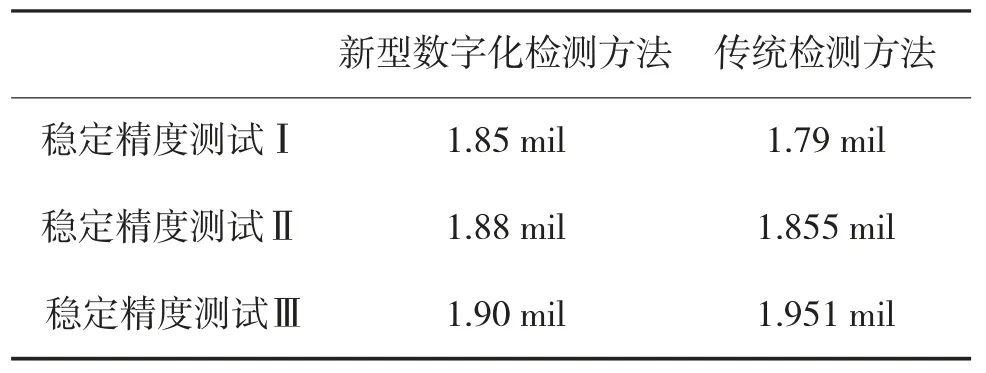
表1 穩定精度測試數據對比
表2給出了跟蹤伺服系統跟蹤3條不同航路的測試結果對比。從表2的數據可以看出,對于不同的3條航路,兩種方法檢測結果趨勢一致;然而新型數字化檢測方法的檢測結果由系統誤差(均值)和隨機誤差(均方差)兩部分約束,更加嚴謹、科學。
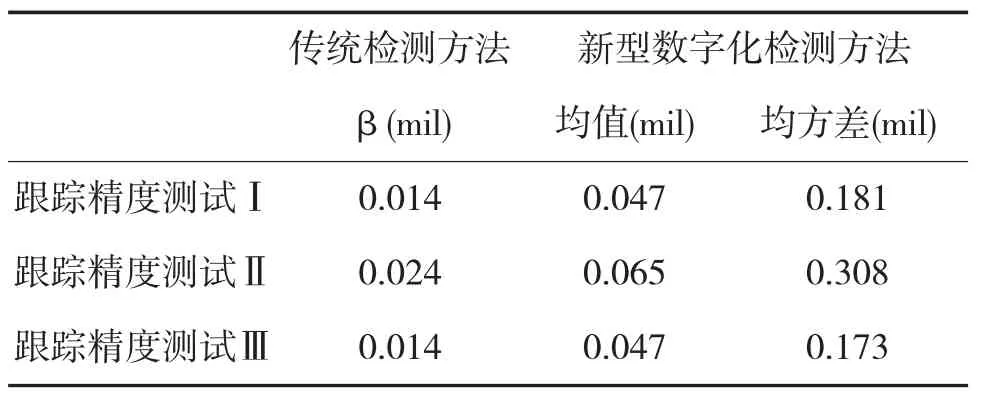
表2 跟蹤精度測試數據對比
最大跟蹤角速度和最大跟蹤角加速度,新型數字檢測方法的檢測結果不僅應給出最大跟蹤角速度或最大跟蹤角加速度的檢測數值,還應給出該數值對應的跟蹤精度,這樣更加嚴謹,測試數據對比情況可參見下頁表3。
對最小平穩速度進行了兩次檢測,其結果即低速示性數數據參見表4。可以看出兩次檢測結果第1次的平穩性要優于第2次。可見,新型數字化檢測方法較人為目視法更為嚴謹。
4 結論
新型數字化檢測方法的提出立足點是跟蹤伺服系統數字化程度的提高。依托跟蹤伺服系統內部信息采用總線傳輸方式,新型數字化檢測方法完全采用數字化方式實現,較傳統檢測方法能夠省去繁雜的專用測試設備,便于上手,大大提升了重要指標的檢測科學性、便捷性和嚴謹性。但是,新型數字化檢測方法存在一定應用場合的約束,首先必須針對數字化跟蹤伺服系統,對于模擬跟蹤伺服系統還應采用傳統檢測方法;其次新型數字化檢測方法需要對傳感器輸出和模擬航路進行初始標定。
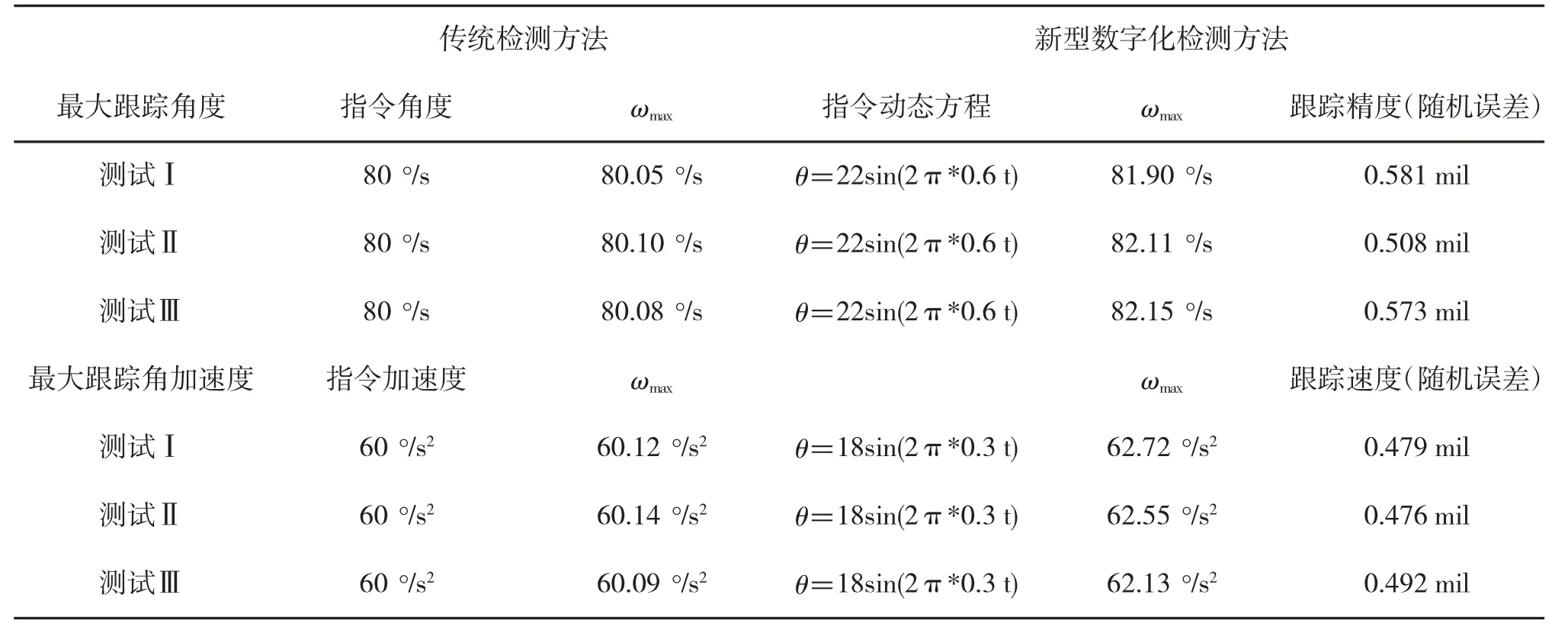
表3 最大跟蹤角速度和最大跟蹤角加速度數據對比
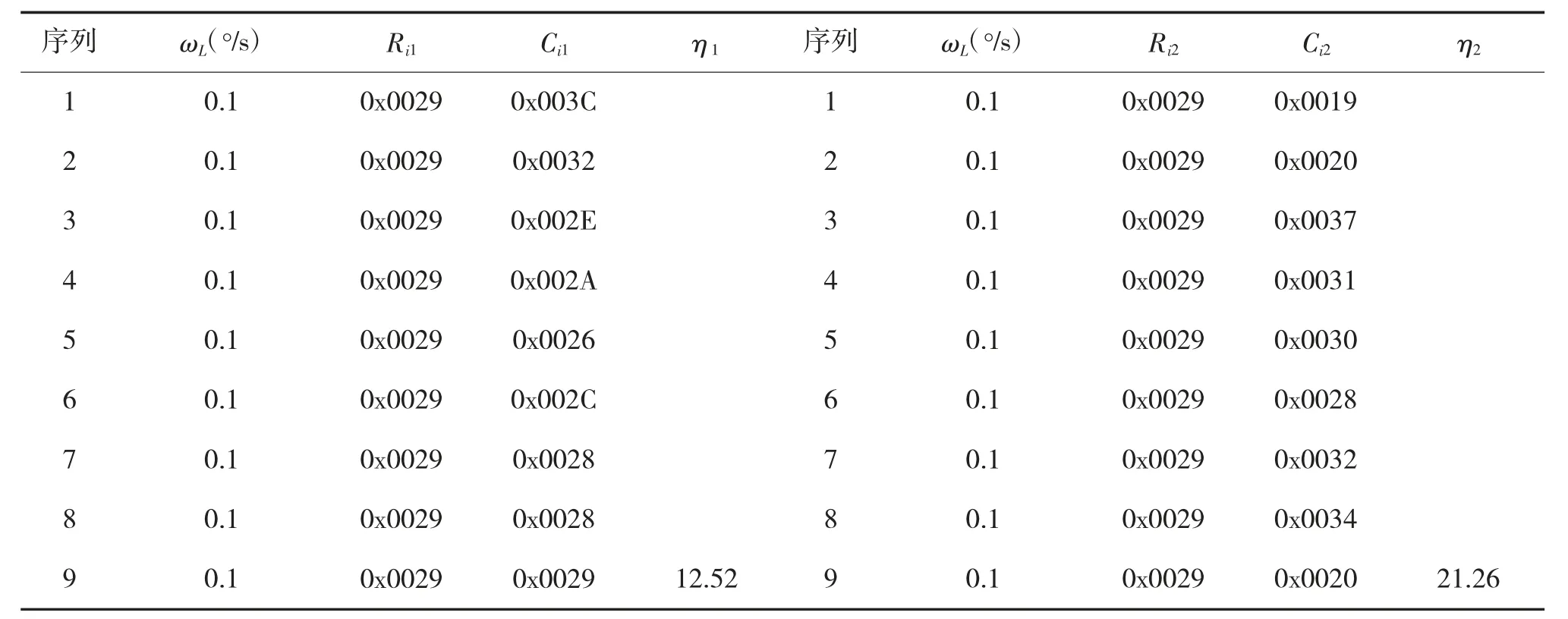
表4 最小平穩速度檢測數據
基于新型數字化檢測方法的研究,后續還可以通過編程的方式,實現從數據采集到檢測結果的全自動輸出,能夠提升重要指標檢測的自動化程度。提升重要指標檢測的自動化程度將是未來的一個研究方向。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34