水下航行器軸向運(yùn)動的初始修正自適應(yīng)反演控制方法*
2019-08-27 03:46:40余有芳嚴(yán)求真蔡建平
火力與指揮控制 2019年7期
余有芳,嚴(yán)求真,蔡建平
(1.浙江商業(yè)職業(yè)技術(shù)學(xué)院應(yīng)用工程學(xué)院,杭州310053;2.浙江水利水電學(xué)院信息工程學(xué)院,杭州310018;3.浙江水利水電學(xué)院電氣工程學(xué)院,杭州310018)
0 引言
作為一種水下機(jī)器人,自主水下航行器如今已應(yīng)用于科學(xué)研究、企業(yè)民用和軍事等領(lǐng)域,執(zhí)行著諸如深海勘探開發(fā)、水文數(shù)據(jù)采集、水下搜救、海戰(zhàn)偵察攻擊等任務(wù)[1-2]。隨著自主水下航行器應(yīng)用范圍的不斷擴(kuò)大,水下航行器軸向控制問題,引起了人們的關(guān)注[3]。研究航行器軸向運(yùn)動精確控制方法,實現(xiàn)對參考信號的精確跟蹤,有助于自主水下航行器高質(zhì)量地完成偵察、水下測量和目標(biāo)跟蹤等任務(wù),因而是一項有意義的工作。
自主水下航行器往往在復(fù)雜的水下環(huán)境中航行,要對其進(jìn)行精確建模是一件困難的工作。針對自主水下航行器的控制方法研究可追溯到20世紀(jì)90年代初,早期的結(jié)果多為PID控制方法[4]。本世紀(jì)以來,人們著手探討水下航行器的先進(jìn)控制方法。Smallwood等研究忽略海流影響情形下的自主水下航行器自適應(yīng)控制方法[5]。在文獻(xiàn)[6]中,Riedel為水下航行器設(shè)計滑模變結(jié)構(gòu)控制器,但沒有進(jìn)行穩(wěn)定性分析。Gao等研究水下航行器在受海流影響情形下的軸向運(yùn)動軌跡跟蹤問題,給出了自適應(yīng)反演滑模控制器設(shè)計和自適應(yīng)積分反演控制器設(shè)計兩種方案[7-8]。
水下航行器在執(zhí)行跟蹤任務(wù)時,航行器的起始位置常常不在參考軌跡的起點。當(dāng)航行器的質(zhì)量和初始誤差均較大時,在執(zhí)行跟蹤任務(wù)的起始時間段內(nèi),采用常規(guī)控制方法實現(xiàn)跟蹤任務(wù)需要航行器系統(tǒng)能夠提供較大的輸出動力。這一期望輸出動力有時甚至超過航行器動力系統(tǒng)的最大輸出,導(dǎo)致理論算法在具體實施時無法獲得較好的收斂結(jié)果。因此,改善或緩解這一矛盾,是一件有意義的工作,是開展本文所述研究工作的動機(jī)。
本文研究水下航行器的自適應(yīng)反演控制方法,主要工作與創(chuàng)新之處在于:1)利用傳統(tǒng)自適應(yīng)反演控制方法為自主水下航行器設(shè)計控制器,并進(jìn)行分析;2)為了克服傳統(tǒng)自適應(yīng)控制算法在實施時,由于航行器質(zhì)量和初始誤差較大所導(dǎo)致的期望輸出推力過大現(xiàn)象,本文在給出修正信號構(gòu)造方法的基礎(chǔ)上,提出初始修正自適應(yīng)反演控制方法,對此予以改善。
1 問題的提出
考慮解耦后的水下航行器的軸向運(yùn)動模型

式中,x和u分別表示水下航行器的軸向位移和相對海流的前進(jìn)速度,c為未知的常值海流速度,m和mu分別為航行器本身的質(zhì)量和流體附加質(zhì)量,Cuu為流體二次阻尼系數(shù),F(xiàn)t為航行器系統(tǒng)的推力,F(xiàn)d代表外部常值擾動,m、mu和Cuu均為未知的正常數(shù),m-mu>0。
2 無初始修正的自適應(yīng)反演控制




由于

故
基于式(7),為系統(tǒng)式(2)設(shè)計控制律

及自適應(yīng)律

閉環(huán)系統(tǒng)具有的性質(zhì)可以總結(jié)為如下定理:
定理1將控制律式(8)及自適應(yīng)律式(9)施加于水下航行器軸向運(yùn)動系統(tǒng)式(2),可實現(xiàn)位置跟蹤誤差漸近收斂于零,并確保閉環(huán)系統(tǒng)所有信號有界。
證明選擇Lyapunov函數(shù)


將式(8)和式(9)代入式(11),可得

由式(12)可見,


對式(12)的兩邊積分,有

根據(jù)Lyapunov函數(shù)的非負(fù)性,由上式可以推出

上文給出的控制設(shè)計方案中,利用自適應(yīng)方法估計未知常數(shù),可以實現(xiàn)跟蹤誤差漸近收斂至零。在輸入增益較小(即航行器本身質(zhì)量較大)場合,且初始誤差較大場合,利用上文給出的控制方法設(shè)計控制器,往往需要較大的控制輸入,有時可能超過實際系統(tǒng)的最大輸出動力(本文將在數(shù)值仿真部分展示這一點)。針對這一問題,下一節(jié)對本節(jié)提出的算法進(jìn)行改進(jìn)。
3 初始修正自適應(yīng)反演控制
3.1 修正參考信號的構(gòu)造
借鑒文獻(xiàn)[9-11],利用待定系數(shù)法,構(gòu)造曲線

可以看出,這些曲線具有如下性質(zhì):
3.2 控制器設(shè)計
類似于上一節(jié)的式(8)和式(9),分別設(shè)計控制律及自適應(yīng)律為

及

將控制器式(13)作用于系統(tǒng)式(2),具有如下性質(zhì):

證明 與定理1的證明相類似,對Lyapunov函數(shù)
求關(guān)于時間的導(dǎo)數(shù),即可得證。此處限于篇幅,略去詳細(xì)步驟。
在本節(jié)給出的設(shè)計方法中,將原有的系統(tǒng)輸出對參考信號的跟蹤轉(zhuǎn)化為系統(tǒng)輸出對修正參考信號的跟蹤。這樣,原設(shè)計方案中可能出現(xiàn)的期望控制輸入量過大現(xiàn)象得到了改善。
4 仿真算例

2)為了改善控制量過大的情況,采用飽和方法,將推力限幅在-10 KN到10 KN之間,其余仿真參數(shù)取值同前。仿真時長80 s,相應(yīng)結(jié)果見圖3和圖4。從圖3可見,航行器無法對參考軌跡進(jìn)行漸近跟蹤,從頭至尾,一直存在較大的跟蹤誤差,且誤差沒有收斂;由圖4可見,控制量即推力的顫振情況非常嚴(yán)重。
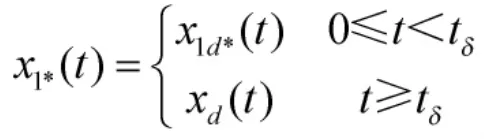
3)采用控制器式(13)進(jìn)行仿真,tδ=5,其余仿真參數(shù)取值同1),仿真時長30 s,相應(yīng)仿真結(jié)果見圖5和下頁圖6。可以看出,將取得較好的跟蹤效果,表現(xiàn)在:由圖5可見,當(dāng)t≥tδ時,航行器可以對參考信號進(jìn)行精確跟蹤;其次,需要的控制量即推力也較小,對比圖6、圖2和圖4,可以看出,采用初始修正自適應(yīng)反演控制的控制量較非初始修正自適應(yīng)反演控制的控制量小,且不會出現(xiàn)顫振現(xiàn)象。
圖1 非初始修正控制下的位置跟蹤
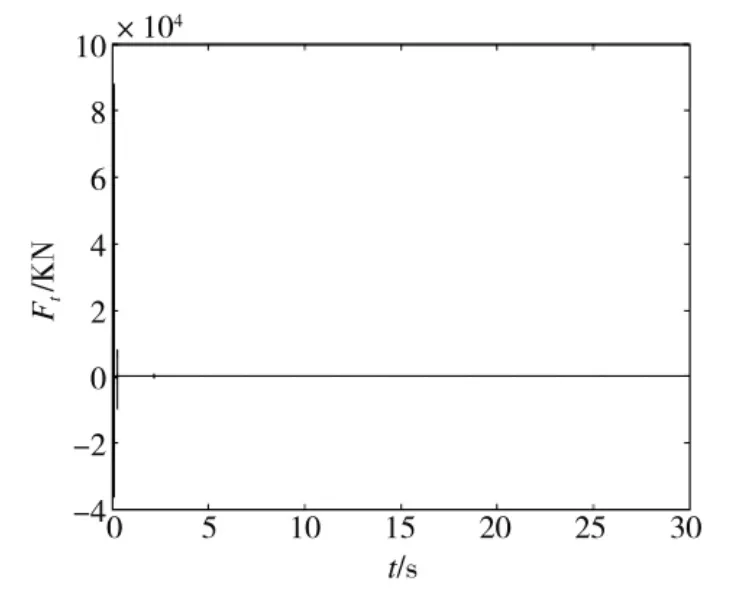
圖2 非初始修正控制下的推力
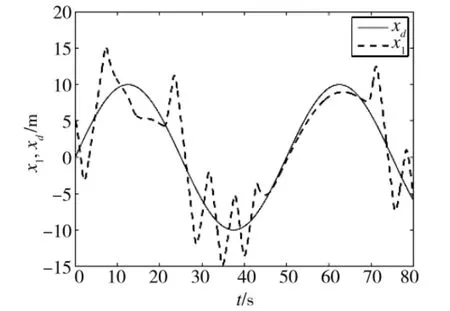
圖3 非初始修正控制下的位置跟蹤(有輸入限幅)
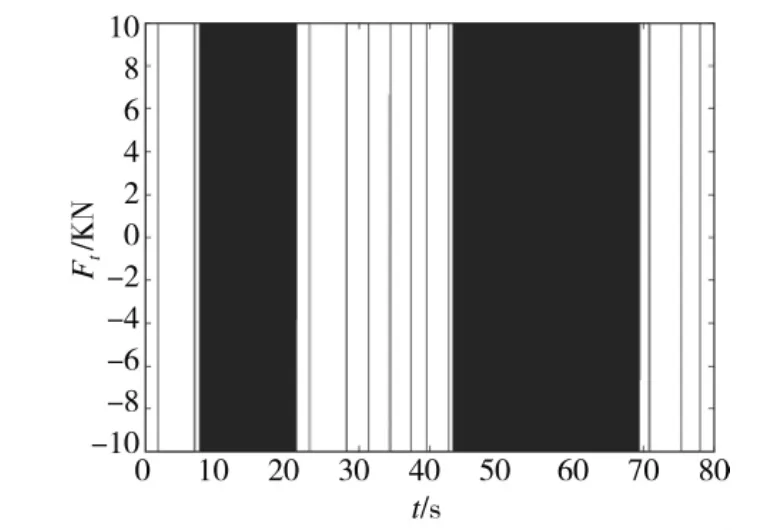
圖4 非初始修正控制下的推力(有輸入限幅)
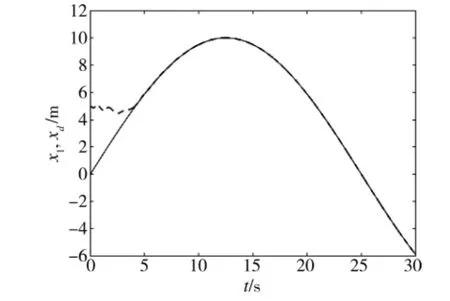
圖5 初始修正控制下的位置跟蹤
仿真對比結(jié)果表明,對于質(zhì)量較大且初始誤差也較大的水下航行器,采用本文提出的初始修正自適應(yīng)反演控制方法,可以顯著地降低實施跟蹤任務(wù)所需的期望輸出動力。
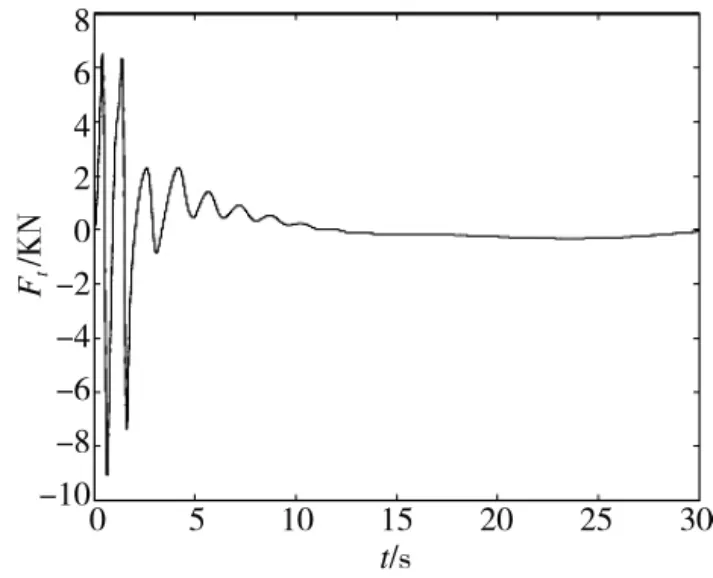
圖6 初始修正控制下的推力
5 結(jié)論
本文研究水下航行器的自適應(yīng)控制方法,首先根據(jù)傳統(tǒng)的自適應(yīng)反演控制方法,為航行器系統(tǒng)設(shè)計控制器,該方法在執(zhí)行跟蹤任務(wù)的起始階段,可能出現(xiàn)控制器所期望的推力(控制量)超過實際動力系統(tǒng)所能提供的最大推力現(xiàn)象。為改善這一矛盾,本文對前述方法進(jìn)行改進(jìn),提出初始修正自適應(yīng)反演控制設(shè)計方法。仿真結(jié)果表明,該方法可以緩解傳統(tǒng)自適應(yīng)反演控制設(shè)計方法在實施時所需的控制量過大現(xiàn)象,并取得較好的跟蹤性能。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25