基于模糊隨機貝葉斯網絡的意圖估計方法
2019-08-27 03:46:32范瀚陽高睿源金興華
火力與指揮控制 2019年7期
范瀚陽,高睿源,金興華
(中國電子科技集團第二十八研究所,南京210007)
0 引言
隨著信息化戰爭的發展,認知域的對抗成為決定戰爭走向的核心和關鍵[1],而意圖估計正是現代作戰指揮決策的核心技術之一。意圖估計(Intention estimation)是數據融合JDL五級模型中的二級融合[2-3],即態勢評估的重要功能之一。意圖估計是通過對各傳感器的信息指標進行融合推理,得到敵方的作戰企圖和打算,輔助指揮員進行戰場決策,在局部戰爭、反恐和國家安全維護等領域均有應用。影響意圖估計[4-5]結果的因素很多:航速、目標身份、高程等。拋開雷達噪聲以及測量誤差的影響,這些指標本身也具有很大的不確定性,如目標的航速時快時慢,對于武器強弱的情報更是模糊易變,隨著這些時刻跳變的戰場信息不斷輸入到分析系統中,一系列變化的估計結果也在不斷輸出,而只有穩定的估計結果才對輔助決策具有意義。
匹配濾波、模板及圖解等方法是目前比較成熟的意圖推理方法。文獻[6]運用貝葉斯網絡的方法對空中目標的意圖進行推理,將敵方飛機的大小、航速等指標看作隨機模型,但無法對飛機的火力大小、身份信息等主觀指標進行描述;文獻[7]則引入了模糊貝葉斯網絡,重點對目標的各項指標進行模糊化,進而確定結點并推理,但無法推理具有隨機性的戰場因素。
1 意圖估計及要素
1.1 戰場目標意圖估計要素
戰場目標總是通過一系列的行為完成其預設的戰斗意圖,例如偵察機通過在某些指定區域上方的盤旋飛行,完成其偵察意圖;坦克等裝甲車通過向目標區域行進,執行攻擊作戰。因此,對目標進行意圖分析,即是通過對能夠反映目標作戰企圖的各項因素的收集及融合推理的過程。而反映目標意圖的戰場因素繁雜,且不同場景下需考慮的因素差異性也很大,需依據具體場景參照歷史數據并咨詢專家進行確定,故本節重點在于各項因素的描述及推理。依據機會理論[8-9],可以將戰場因素按照隨機性和模糊性進行劃分。隨機性即客觀的不確定性,目標航速、高程等實測數據,由于噪聲誤差等影響呈現一定的概率分布;模糊性表征的是主觀的不確定性,例如來襲敵目標的規模大小、所攜帶武器的強弱信息等。因此,本節研究了將戰場兩種不確定性統一的模型,即混合模型進行結點構造,是使用模糊隨機貝葉斯網絡進行推理的基礎。
1.2 混合事件與模糊概率
本節引入混合事件對戰場目標的各項指標進行描述。

若樣本空間X為Rm連續的空間:

至此,可使用公式將各戰場因素構造為模糊隨機結點;而對于現有的一些戰場因素,若認為只含有模糊性或隨機性,如目標的身份信息只用攻擊機、偵察機和轟炸機這樣的隨機模型進行分類,可看作混合事件的一種退化描述,依然可以用作模糊隨機貝葉斯網絡的結點,進行推理。下面以距離結點為例,給出結點構造方法示例:
距離信息對于判斷敵方目標意圖起著重要的作用,不論是空戰、海戰還是陸戰場景甚至是空天作戰,敵我距離都是需要參考的重要因素。這里,由于不同場景下距離遠近的判斷門限不同,因此,主要考慮敵我距離的變化對目標意圖估計的影響。那么,分別考慮當目標距離我方越來越近、越來越遠,以及敵我距離遠近不斷變化情況。因此,構建模糊隨機貝葉斯網絡的距離結點時,分為(逐漸遠離,忽遠忽近,逐漸靠近)3個子結點進行描述,分別對應3個模糊子集,使用模糊變量描述。對于敵我距離的遠近變化,定義一個新的變量進行表征,即距離變化率:

其隸屬度函數u(x)如表1所示:
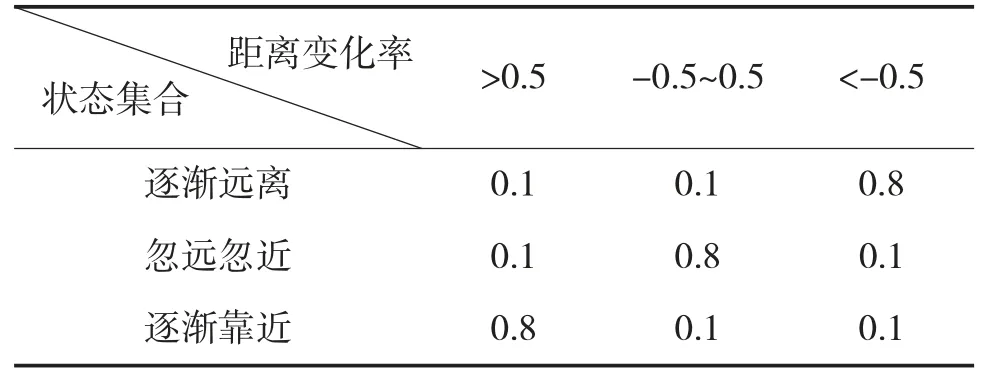
表1 距離變化率隸屬度表
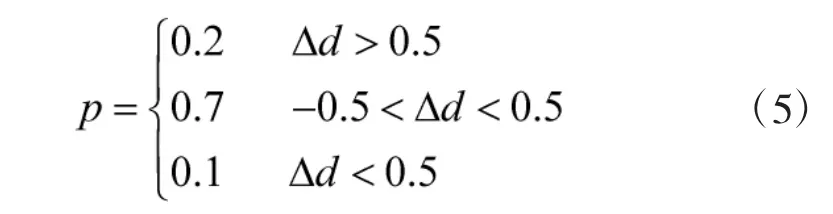
最終,引入距離變化率的模糊概率描述。由于測量誤差及噪聲等影響,得到的目標位置信息呈現概率分布p(x),則其最終模糊概率可由式(5)得到。例如當目標信息檢測值換算為距離變化率時:
2 模糊隨機貝葉斯網絡
2.1 結點推理
為構造能夠推理混合事件的貝葉斯網絡[10-11],除了需要在對網絡的結點進行改造,同時還需要擴展網絡的推理方法,因為貝葉斯網絡的概率推理顯然無法滿足混合事件的不確定性推理。由于多個結點的復雜情況都可以歸類簡化為3個結點的擴展,因此,僅給出簡單情況的推理過程作為示例。
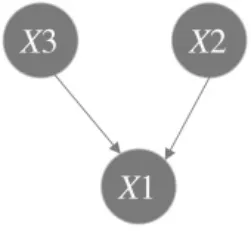
圖1 網絡結點推理示意圖





那么,當網絡的結構確定后,就可以根據上述公式分別確定葉子結點的模糊先驗概率,以及各結點間的條件模糊概率。而進行網絡推理時,由于使用貝葉斯網絡的結構,即使只獲得部分葉子結點的數值,依然可以推動網絡進行推理,得到結果。并且雖然該方法在可能性領域將結點由隨機模型推廣到混合模型,增大了各結點先驗概率,以及結點間條件模糊概率的計算復雜度及量級,但是大部分的計算耗費在網絡構造訓練階段,實際使用時推理進行意圖分析的過程計算量并不大,因此,仍然可以實時快速地輸出意圖推理結果。
2.2 網絡結點及結構
雖然意圖估計的主要研究內容是敵方目標的態勢,但敵我關系以及環境特性也是考量的重要指標。不同場景下,目標指標的重要程度不同,例如平原地區考察地面目標的意圖時,目標的高度變化甚小,對其意圖估計結果影響很小,可忽略不計。而同樣的指標在不同場景下的模糊描述閾值也不同,如對于地面目標,當其時速達到100 km/h,可認為隸屬于速度快的范疇,與攻擊意圖耦合較緊;而如果是空中目標,這樣的速度則隸屬于速度慢的范疇,與偵察意圖更貼合。因此,不同場景目標,應當對應不同的網絡結點及不同的網絡結構。
以空中目標為例,需要考慮的目標指標很多:首先是目標的高度信息,轟炸機在到達作戰區域后,其總是在一定的高度釋放炸彈;其次目標的高度變化信息也是重要的指標,戰斗機進行作戰時往往先拉升一定高度占據太陽的方位,再進行俯沖,此時目標的高度就會呈現一定的規律性,而偵察機進行偵察任務時,往往在固定高度盤旋;目標在雷達照射下的RCS信息表征了目標的大小,如其該項指標更接近無人機大小,則其執行轟炸任務的意圖幾乎為零。因此,咨詢空戰領域專家并結合歷史數據資料,總結出空中目標的意圖估計主要考慮的因素包括:目標的速度、目標滯后角、目標大小(RCS)、機動特性及敵我距離等,具體如圖2所示。將這些基本的影響因素作模糊劃分,再根據其測定值的概率描述,根據式(1)~式(3)描述為混合變量,即可確定網絡葉子結點。限于篇幅不給出具體數值,確定方法參見1.2節距離因素的模糊隨機描述示例。
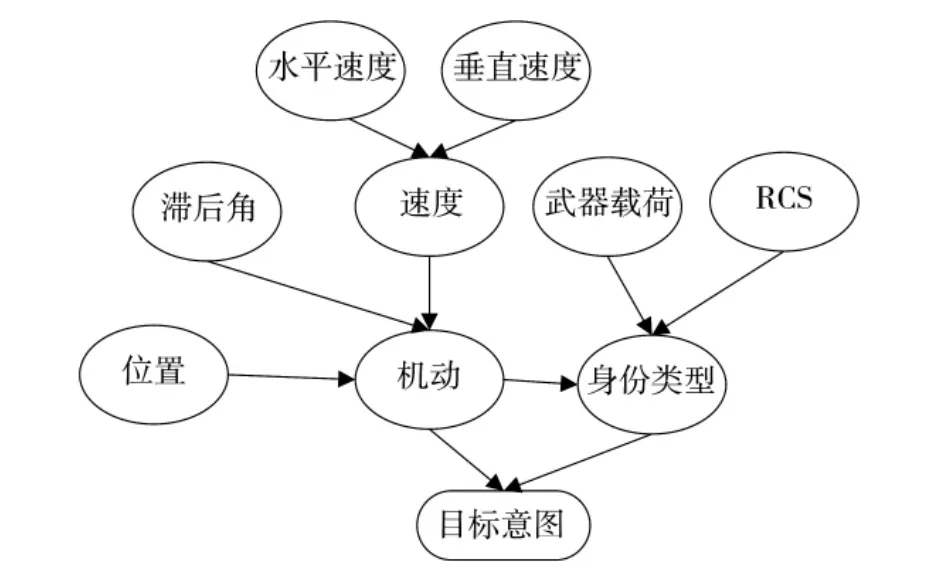
圖2 模糊隨機貝葉斯網絡結構圖
本文設計的簡單空戰場景模糊隨機貝葉斯網絡拓撲圖如圖2所示。貝葉斯網絡[12]的拓撲結構的確定往往使用海量數據的測試樣本,結合智能算法進行多次迭代得到。這里考慮到戰場環境的特異性,歷史數據較少,復現性低,而作戰裝備的更新快,因此,難以獲得同裝備場景下充分的歷史數據用于網絡訓練與構建。故采用過往數據與咨詢領域專家相結合的方法,參考了文獻[13-15]等,給出了初始拓撲關系,并在咨詢相關專家后,進行了調整,如增加了RCS結點以及調整了結點間關系等,最終形成了圖2所示的網絡拓撲圖。
依據現有的少量過往真實數據,利用重點實驗室現有模擬器,給定意圖進行場景模擬,記錄場景下各指標數據作為樣本數據進行訓練,進而得到訓練成熟的網絡,如表2所示。這里限于篇幅,僅給出部分樣本數據作為示例。
這樣,隨著場景不斷深入,各傳感器不斷得到目標的各項指標信息,將其分別轉換即計算其各結點模糊先驗概率,輸入到圖2所示的網絡中,即可推理得到一系列目標在不同時段的意圖輸出。
3 仿真分析
為驗證模糊隨機貝葉斯網絡進行意圖估計的有效性及穩定性,本文根據文獻的研究結果,結合專家的指導,在Matlab平臺下,利用貝葉斯網絡工具箱(Bayesian Network Toolbox,BNT)為基礎,建立了目標意圖模糊隨機貝葉斯網絡模型,并結合多種場景進行了驗證,這里給出一個場景作為示例。
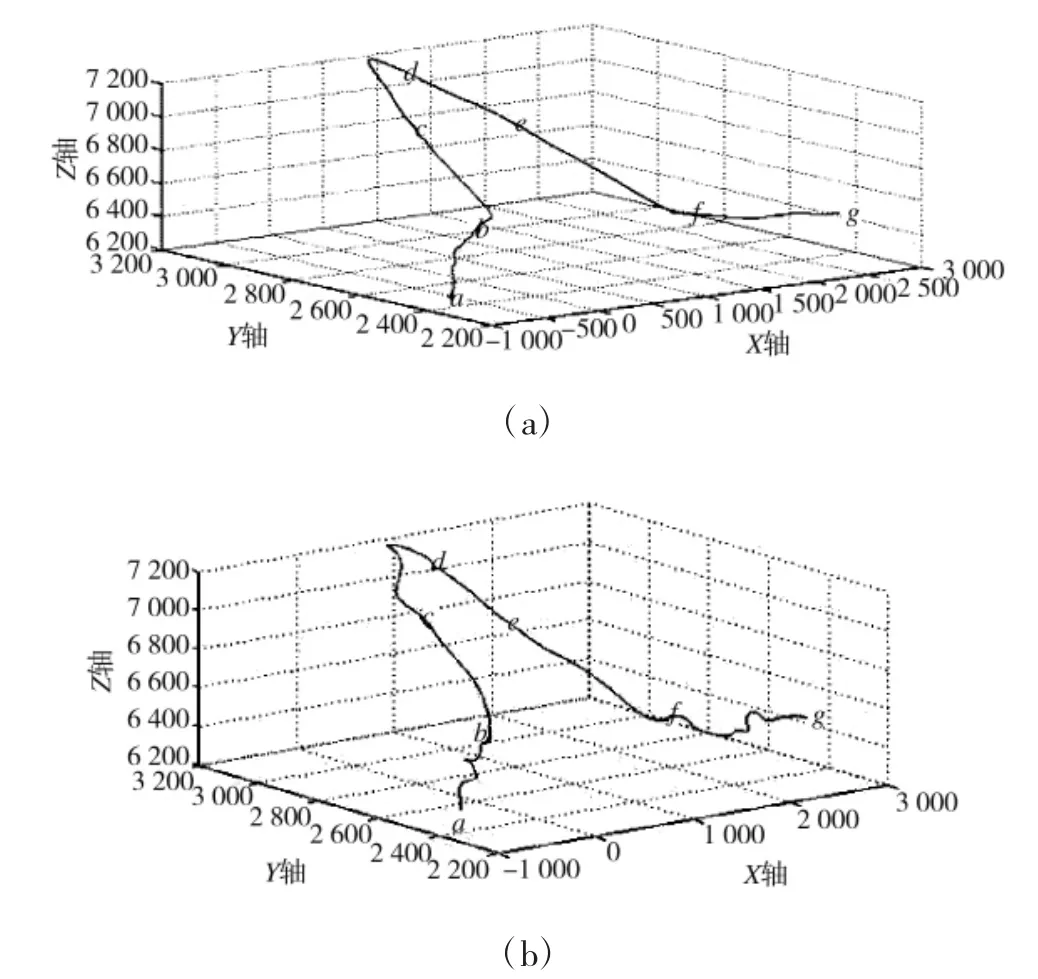
圖3 戰場想定示意圖
如圖3(a)所示,假設我方有基地A和基地B分別在(6 000,1 000,0)和(7 000,5 000,0)位置,考慮敵方有一批空中目標向我方靠近,作攻擊態勢并作出相應機動隱藏意圖:
1)0 s~9 s,目標在6 000 m高度向我方勻速飛來;
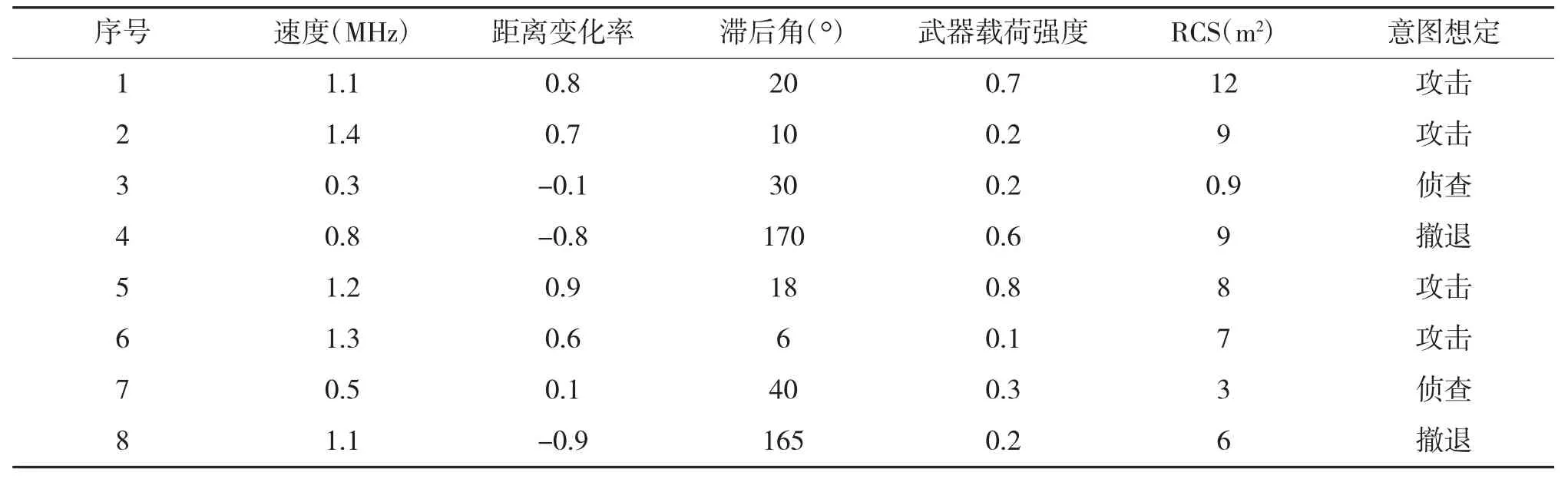
表2 距離變化率隸屬度表
2)9 s~30 s,目標為躲避我方巡航機作迷惑性機動,向左上方緊急機動;
3)30 s~45 s,目標回到正常航行高度,向我方繼續移動,作攻擊態勢;
為模擬真實的測量誤差及噪聲影響,對目標的軌跡加上隨機噪聲作為測試樣本,如圖3(b)所示。驗證使用2.2節所述的模糊隨機貝葉斯網絡進行推理,得到的目標意圖估計結果如圖4所示。
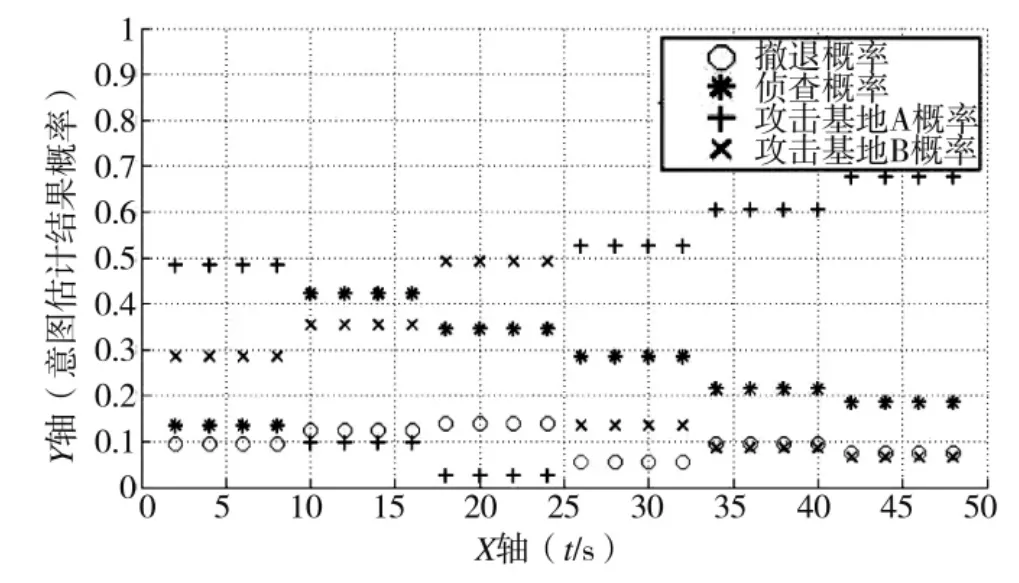
圖4 目標意圖估計仿真結果圖
由圖4可見,在多個觀測點,本文算法均能作出準確有效的意圖估計,而在b-c-d航段,由于目標觀測軌跡較短且目標當前機動未完成,故作出攻擊基地B及偵察的預測,也符合其當時態勢趨勢;而當目標意圖清晰后,在航跡的d-e-f段,亦即目標欺騙性機動的后半段,本算法即能作出正確穩定的意圖估計。
為驗證本文算法在穩健性方面的優勢,以圖3戰場想定為基礎,圖2所示各結點及其關系為基礎,構造簡單貝葉斯網絡進行推理,其結點只具有隨機性。如考慮距離指標時,僅將目標實時距離作為輸入。最終得到的針對圖3場景的估計結果如表3所示:
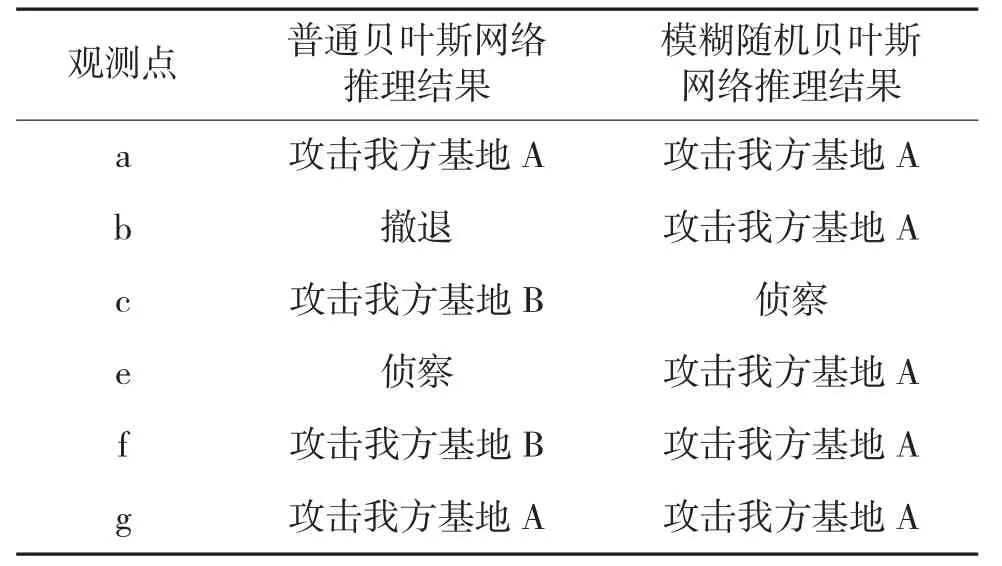
表3 意圖估計結果比較表
從表中可見,普通的貝葉斯網絡輸出結果是不斷變化的,無法采用。并且在該小型場景的尾期,目標的欺騙性機動已經完結,意圖明顯,該方法的輸出結果仍在跳變,甚至作出錯誤的目標意圖估計。
這是因為普通的貝葉斯網絡使用簡單的隨機模型進行推理,對于戰場的模糊變量難以描述。當獲得一個指標觀測值需要輸入網絡時,使用硬性門限進行判決,當某一指標接近門限值時,則易被歸入錯誤的分類,導致推理出現巨大誤差。而模糊隨機貝葉斯網絡使用的混合事件模型,規避了這一問題;同時,并未使用模糊隨機變量的形式,還使得觀測誤差及噪聲造成意圖結果波動,如在航跡f-g段,目標的欺騙機動已完成,攻擊基地A的意圖明顯,但是受到噪聲的影響,使得目標的實時航向及速度等即時信息發生波動,從而造成普通貝葉斯網絡的意圖估計結果產生偏差,且在多個意圖估計結果間跳變,并不穩定。
為驗證本文算法,通過增加敵我目標個數、增加我方空中目標,以及各目標間距離分布等方法構造了不同場景,在類似場景下修改目標速度、高程等指標的方法,進行了多次實驗驗證。綜合結果表明,當目標的意圖穩定后,本文算法均能給出類似上例的穩定正確的意圖估計結果。綜上所述,本文算法既能弱化噪聲的影響,又能夠完備地描述戰場各因素,隨著戰場信息逐步輸入,輸出穩健的推理結果。
4 結論
有效穩健的意圖估計結果能夠作為輔助決策的參考,本文研究了利用模糊隨機貝葉斯網絡的方法提高意圖估計,并通過空戰場景的仿真,對該方法進行了驗證。本文方法通過定義描述戰場因素的混合事件模型,構造網絡結點,進而推理輸出的目標作戰企圖估計結果在穩健性方面有很大優勢,提高了意圖推理結果在實際輔助決策過程中的可參考性。