有/無人機協同使用聲納浮標應召搜潛研究*
2019-08-27 03:46:32潘宣宏
火力與指揮控制 2019年7期
徐 梁,潘宣宏,韓 鵬
(1.海軍指揮學院,南京210016;2.海軍航空大學,山東 煙臺264001)
0 引言
應召搜潛是指反潛航空兵在機場、載艦或指定空域待命,當獲得敵潛艇的活動信息后,根據命令飛往發現潛艇海區進行的搜潛戰斗行動。應召搜潛的特征是已知目標在搜索前某一時刻的大概位置[1]。反潛機的搜潛器材主要有聲納浮標、磁探儀和搜索雷達。其中聲納浮標可快速完成布設,覆蓋海域面積大,是應召搜潛的主要手段[2]。目前相關研究多集中于單架或多架反潛機布設浮標陣形的分析上,較少涉及反潛機和無人機協同使用聲納浮標搜潛內容。但隨著無人機的廣泛運用,在未來反潛作戰中很可能發揮重要角色。因此,以反潛機和無人機協同使用聲納浮標對潛應召搜索為前提,預先研究兩者的運用過程、協同方式,以及無人機監聽航線規劃等問題就顯得尤其重要。
1 有/無人機協同反潛特性
1.1 反潛機反潛特性
1.1.1作戰能力強
反潛機起飛重量大,一次可以攜大量聲納浮標,能夠覆蓋較大海域面積。例如美軍的P-8A反潛巡邏機可以攜帶120多枚聲納浮標,可同時監聽60多枚被動聲納浮標[3]。另外還攜有磁探儀、雷達和先進反潛魚雷系統等,能夠獨立完成對潛艇的探測、跟蹤和攻擊過程。
1.1.2安全性較差
反潛機與戰斗機相比機動性能差,缺少自衛武器,一旦遇到敵空中攔截將很難擺脫。尤其是反潛巡邏機雷達輻射面積大,很容易被作為攻擊目標。
1.1.3反潛效果受外界條件影響大
以往布設和監聽聲納浮標都需反潛機完成,加上在監聽過程中,要連續轉彎機動,以保持長時間重復性監聽,這使得飛行員的精力消耗較大,飛機操控難度較高。這也導致實際用于監聽時間有限,搜潛效率并不高。另受飛機性能影響,在監聽航路設置上約束條件多,如轉彎半徑、俯仰角度和速度等,通常難以選擇最優監聽航路飛行。
1.2 無人機反潛特性
1.2.1續航時間長,作戰半徑大
隨著核動力、AIP等新型動力技術和隱身技術的快速發展,現代潛艇兵力的水下續航時間更長、靜音效果更好。因此,現代反潛體系應具備對敵潛艇進行持續探測的能力,才能滿足作戰的需要。目前大中型無人機平臺的續航時間普遍在40 h以上,甚至可達幾天或幾周,即使小型無人機也在20 h左右[4],有/無人機協同反潛作戰可有效彌補反潛機在留空時間上的不足,同時彌補水面艦艇速度上的劣勢,形成優勢互補。
1.2.2隱蔽性較強,受外界影響小
無人機雷達反射面積小,針對有人機設置的雷達很難發現無人機。再者無人機受地理環境影響小,可通過超低空掠海飛行增大突防概率,或將飛行高度設置在萬米高空,以擺脫敵防空武器的射擊范圍。并能夠代替反潛機執行重復性的監聽任務,進而將飛行員從中解放出來,集中精力于整個態勢的感知和對無人機的控制上來。又因無人機更加機動靈活,實現快速轉彎和改平等戰術動作,容易選擇較優航路實施監聽,提高監控效率。
1.2.3造價相對低廉,使用更加靈活
無人機成本相比反潛機和潛艇都要低很多,即便無人機集群作戰的成本也相對低廉,因此,一旦遇有威脅或損壞也不會造成任務和成本的較大損失,具有“以小博大”的效果。目前無人機已實現艦載、空中發射與回收[5],能夠根據需要靈活部署,加上其基本不受飛行過載的影響,在與有人機協同配合上可選擇的戰術方法更加多樣。
2 有/無人機協同使用聲納浮標應召搜潛分析
2.1 協同搜潛過程
綜上所述,通過有/無人機優勢互補,可以明顯提升應召搜潛的效率。實際操作中可由反潛機攜帶數量較多的聲納浮標,快速到達指定海域按相應陣形布設聲納浮標,并根據事先獲取的潛艇位置信息和運動要素,及應召延誤時間,確定以扇面陣或圓形陣進行布設[6]。再根據搜索海域的大小、形狀和聲納浮標布設范圍等,確定無人機的監聽方案,轉入對浮標陣的監聽。一旦無人機在監聽過程中接收到敵潛艇信號,即回傳至有/無人機協同網絡,使有/無人機之間、無人機群之間共享同一態勢,并根據反潛機下達的任務指令改為協同對潛跟蹤或實施協同攻擊。
反潛機根據前出距離的大小和敵空中威脅情況,占據有利空域監控無人機作戰行動,完成信息收集、處理、規劃和控制無人機,由于對戰場情況的掌握更加及時和直觀,能夠有效協調無人機行動。但在起飛集合、飛向戰區和返航降落階段,指揮控制權應由反潛機轉交給地面(海上)控制單元,實現快速展開和撤離。多無人機集群內部采取分布式控制,即各無人機充當網絡節點接收相應控制指令,進而編碼轉換成可以執行的參數,并對自身飛行姿態進行修正,實現集群內部的導航、防相撞、協同和網絡重構等功能[6]。
2.2 協同搜索方式
2.2.1扇形區域協同搜潛方式
無人機和反潛機協同應召搜潛,當已知敵潛艇的航向范圍,并通過外界信息預估得到敵潛艇可能航速,此時反潛機應快速在敵潛艇航向前布設浮標障礙,遮攔其航行寬度,并由無人機完成監聽任務。通過這種區分任務協同,減少了反潛機為保持布設和監聽浮標同步所做的復雜機動,同時還能縮短整個延誤時間,從而提高搜潛的效率。考慮敵潛艇運動要素誤差和延誤時間等,認為敵潛艇以最大航速抵達第1道浮標障礙Arc-1。
實際中為降低自身被探測的概率,敵潛艇將利用小噪聲航速,在浮標障礙Arc-1工作期間,敵潛艇很可能未抵達依據敵潛艇最大航速而布設的聲納浮標障礙,此時反潛機需布設數道浮標障礙攔截[7]。其中浮標障礙的數量根據反潛機攜帶的聲納浮標數量,無人機的數量和監聽能力而定。無人機在多道聲納浮標障礙中的監聽方式可以采取單架進行監聽,若超出其監聽范圍則改為多架無人機分區域實施監聽。
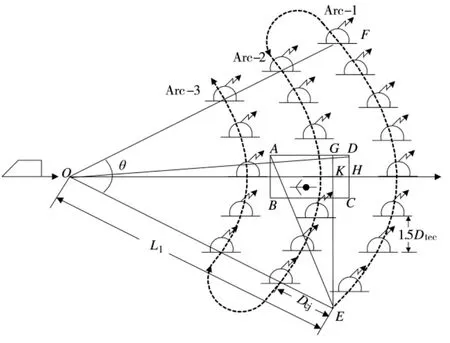
圖1 有/無人機扇形區域布設和監聽浮標陣示意圖
如圖1所示,反潛機布設的第1道攔截障礙Arc-1與發現潛艇位置點O的距離為L1。

式(1)中,Vmax為預估的敵潛艇最大航速;t1為第1次獲得與敵潛艇接觸至反潛機接到起飛指令的時間;t2為反潛機起飛所消耗的時間;t3為反潛機飛至搜索區所用時間;t4為反潛機布設第1道浮標障礙所用時間;epoin為確定的最后丟失接觸點和飛機進入搜索區位置合成均方差。
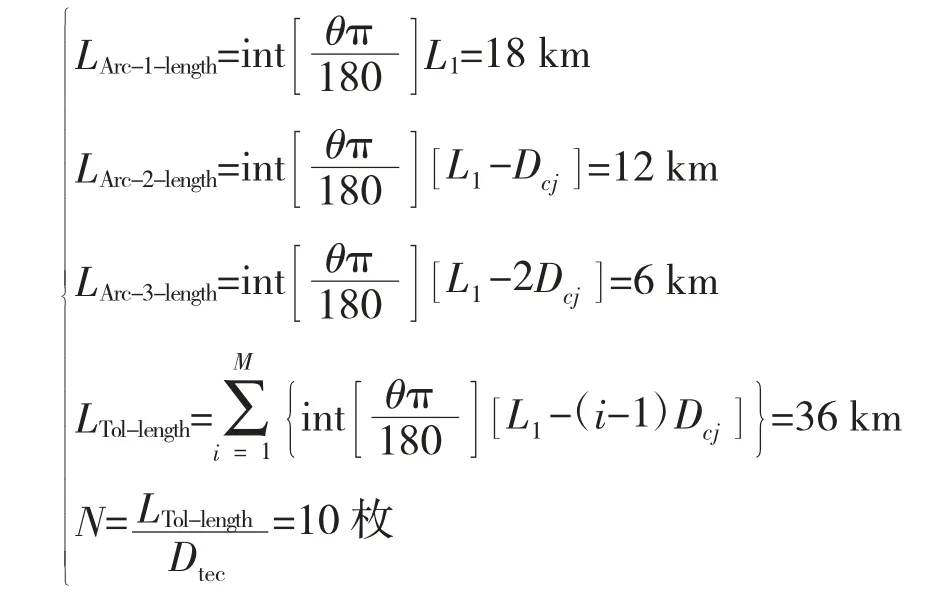
根據L1與實際消耗時間計算潛艇能夠抵達第1道浮標障礙Arc-1的最小航速,進而利用該航速再確定第2道浮標障礙的位置,以此類推直至內側的浮標障礙發現潛艇或小于當時條件下敵潛艇最低航速,則停止布設[8]。其中,每層浮標障礙的長度Larc-length、浮標障礙總長度LTol-length和所需的浮標數量N分別為:
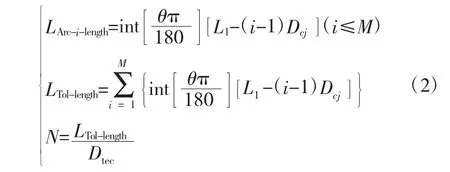
式(2)中,θ為敵潛艇來襲扇面角;M為反潛機布設的浮標障礙層數;Dtec為聲納浮標的探測距離;Dcj為浮標障礙層距。
2.2.2圓形區域協同搜潛方式
當已知敵潛艇丟失位置點,潛艇的航速和航向都未知時,為盡快與敵潛艇再次建立接觸,此時反潛機應布設圓形浮標陣。根據延誤時間、敵潛艇航速范圍和完成任務時間要求等,確定具體布設幾道圓形陣,其原理和計算公式與扇面浮標障礙相似。無人機在圓形陣內采用相應的監聽方案對聲納浮標監聽。如果圓形浮標陣范圍較大,需相應增加無人機的數量分區域協同監聽,但應由反潛機明確各架無人機的進入方向、速度和高度,以及規劃每架無人機具體的監聽航路,如圖2所示。
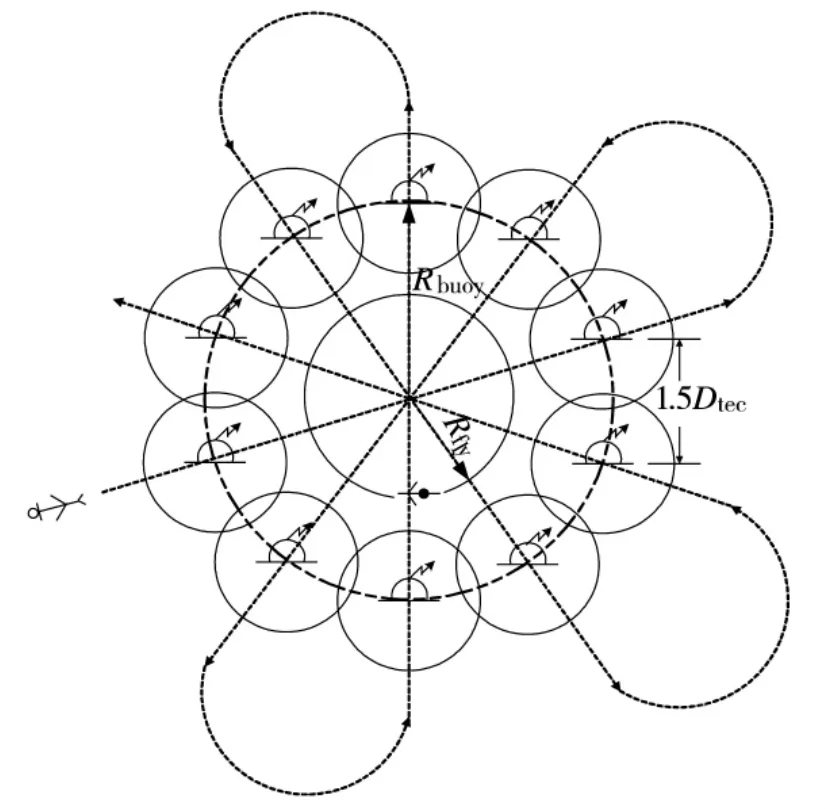
圖2 有/無人機圓形區域布設和監聽浮標示意圖
有/無人機無論采取哪種協同方式,應召搜潛概率與無人機的監聽方案直接相關。因此,應在油量、航程等相關約束條件下,根據當時的作戰態勢,綜合各傳感器信息,由反潛機實時在線規劃無人機的監聽航路,即確定無人機的航線、飛行高度和速度。因無人機的留空時間要遠大于反潛機,為保持對無人機的連續控制,可采取反潛機空中換班或與艦載(岸基)指揮系統交替指揮,實現對無人機控制的無縫對接。
2.3 無人機監聽航路規劃
2.3.1航路代價函數
無人機在規劃監聽航路過程中要考慮的代價因素很多,如航線長度、飛行時間、耗油量和受敵情威脅等,下面分別進行分析。假定無人機在監聽過程中勻速飛行,無人機的耗油量可以表示為:

式中,Moil為無人機按某條路徑飛行時的耗油量;t為無人機按某條路徑飛行時間;eoil為無人機耗油率;D為無人機按某條路徑飛行距離;v為無人機按某條路徑的平均飛行速度。
為保持穩定接收聲納浮標無線電信號,無人機除在起飛、降落或狀態轉換時會出現變速,在監聽過程通常處于定高、定速的狀態下飛行。由式(3)可知,在監聽過程中的耗油量、飛行時間都將與其飛行長度成正比,進而可得出無人機在監聽過程中耗油量和飛行長度的函數為:

式中,WD是無人機在第i條路徑飛行時的路徑代價;Di為無人機在第i條路徑飛行時路徑長度;k為路徑系數(可視為不變);i為監聽航路中任意兩航點間可能飛行路徑中的一條。
無人機在監聽過程中受到的威脅一方面來自于集群內部可能發生的碰撞威脅;另一方面來自于敵防空威脅,因而無人機在任意兩點間按某一條路徑飛行的代價函數可表示為:

式中,Wi是無人機第i條路徑飛行的總代價;Ai是無人機在第i條路徑飛行時的威脅代價。
因此,假定當無人機在各自區域不存在威脅,從開始直至結束監聽總的飛行代價W為:

式中,j是無人機在監聽過程中飛行路徑的數量。
通過式(5)可見,無人機執行監聽任務的總代價取決于飛行路徑的長度。
2.3.2監聽航路規劃
1)扇形應召搜潛無人機監聽航路規劃
已知敵潛艇來襲扇面,無人機監聽航路可以沿著預估的敵潛艇航向,也可以垂直于敵潛艇航向,如圖1所示的監聽方案:
由此可得:

綜合上述分析,隨著敵潛艇的速度逐漸減小,反潛機所布設的聲納浮障礙會逐漸向O點靠近。假設敵潛艇在O點保持靜止時,聲納浮標將覆蓋整個扇面區域。當敵潛艇來襲扇面角θ一定,L1與AE、OD成正比,與KG、DH、AD成反比,因此,只有滿足:

式(7)中,Dcom為無人機可以有效監聽浮標距離;Rmin為無人機最小轉彎半徑。
此時單架無人機能夠覆蓋的聲納浮標障礙半徑最大為LUAV-max。即只有當無人機按照最小轉彎半徑進行圓周飛行時監控扇形區域面積最大,如圖3所示。若L1>LUAV-max,應指派多架無人機分區域協同實施監聽,這里不作深入討論。
圖3 無人機采取圓形監聽航路監聽扇形區域
2)圓形應召搜潛無人機監聽航路規劃
圖4 圓形浮標陣無人機監聽航路示意圖
敵潛艇航速和航向范圍都未知情況下,為盡快與敵潛艇建立接觸,在反潛機攜帶聲納浮標數量足夠的情況下,應采取包圍的方式。如圖4所示,Rbuoy為圓形聲納浮標陣的半徑;Rfly為無人機監聽圓形聲納浮標陣的飛行半徑。當Rfly+Rbuoy>Dcom時無人機在監聽的過程中總會有部分聲納浮標不能被監聽;當Rfly+Rbuoy≤Dcom時將能夠保證所布設的聲納浮標全部在無人機監聽范圍內。針對第1種情況,為防止敵潛艇逃逸只能增加無人機的數量,擴大監聽范圍。這里對第2種情況下單架無人機監聽航路規劃問題進行分析。
通過上面分析可得Rbuoy≤Dcom-Rfly,因此,只有當無人機監聽飛行半徑Rfly最小時,此時監聽的浮標陣最大。因又存在Rfly≥Rmin,所以無人機可以監聽的最大浮標陣半徑為:

式(8)中,Rbuoy-max為無人機可以監聽的最大圓形浮標陣的半徑。
綜上所述,無人機按照最小轉彎半徑做圓周飛行監聽聲納浮標障礙,此時的航路代價最小,同時監聽的聲納浮標障礙半徑最大。
3 實例分析
3.1 計算條件
這里僅以反潛機布設扇面浮標陣,無人機按照長方形監聽航路為例進行說明。
假設敵來襲扇面角為60°,從接到任務指令直至到達任務海域耗時0.5 h;預估的敵潛艇最大航速為18 kn,小噪音航速8 kn,并沿扇面角平分線進入浮標陣,且方向不變;無人機速度39 m/s,無人機實際轉彎半徑5 km,最小轉彎半徑4 km,無人機監聽航線2AD=DC=20 km;反潛機共布設3層浮標障礙,層間距為1.9倍聲納浮標作用距離,每層浮標間隔為1.5倍聲納浮標作用距離,浮標作用距離為3 km,浮標工作壽命2 h,無人機與浮標通信距離40 km。
3.2 計算結果
由假設條件,以及式(5)式(6)可得無人機能夠監聽的最大扇形浮標障礙半徑:

又由式(1)可得:

因此,一架無人機完全可以監控依據敵潛艇最大航速所布設的浮標障礙。根據式(3)~式(6)和圖1,可得無人機實際監聽航路代價:

而由式(7)和圖3可知R機=Rmin時無人機的航路代價最小為Wmin,計算如下:

由式(2)可得,扇面浮標陣相關參數為:
3.3 結果分析
通過對上述計算結果的分析,可知:
1)采取反潛機布設扇面浮標陣,無人機采取方形監聽方案可行。
2)在滿足相關約束條件下W與規劃的無人機監聽航線長度成正比,當無人機以Rmin為半徑的圓形監聽航線時代價最小,但無人機需連續轉彎監聽,飛行控制難度較高,應謹慎采用。實際中采取一邊為2Rmin,另一邊小于浮標陣的類橢圓形跑道監聽航線為宜。
4 結論
本文介紹了應召搜潛時有/無人機使用聲納浮標協同運用過程,在此基礎上詳細分析了協同模式和無人機監聽航線規劃問題,提出無人機監聽時最優航路,并通過計算進行驗證,為今后研究有/無人機協同反潛作戰打下了一定基礎。有/無人機使用聲納浮標應召搜潛只是兩者協同反潛的一部分,在檢查和巡邏反潛中對于協同方式、監聽航線規劃等問題上會存在明顯不同,這將是今后的研究方向。