采用RBF神經網絡PID控制的液壓挖掘機運動誤差研究
2019-08-22 11:10:16崔慧娟
微型電腦應用 2019年8期
崔慧娟
(咸陽職業技術學院 機電(技師)學院, 咸陽 712000)
0 引言
挖掘機在施工領域內的應用非常明顯,大約有2/3的石方和土方開采工程由挖掘機完成[1-2]。挖掘機工作環境相對復雜,操作稍微不當就會發生事故,甚至造成人員傷亡。當前,挖掘機大多采用人工進行操作,駕駛員的人身安全很難得到保障。若想提高駕駛員操作效率,需要對駕駛員進行長期培訓,使得生產成本增加。隨著信息化的迅速發展,液壓挖掘機智能化很快將會實現,不僅可以提高挖掘機工作效率,而且可以完成各種危險環境中作業。但是,挖掘機手臂執行任務過程中,需要準確的定位,若控制不當,則會造成重大經濟損失。因此,研究高精度的液壓挖掘機控制方法,促進國家經濟發展具有重要意義。
目前,很多學者對液壓挖掘機控制方法進行了研究。例如:文獻[3-4]研究了液壓挖掘機模糊PID控制方法,設計了電液比例系統仿真模型,給出經典PID控制器方程式,根據模糊規則建立液壓挖掘機模糊PID控制方法,通過仿真檢驗模糊PID控制效果,從而提高了控制系統響應速度。文獻[5]研究液壓挖掘機PID控制方法,分析了挖掘機液壓系統的組成部分,給出了PID控制方程式,通過調節比例、積分和微分系數實現液壓挖掘機在線控制,但是該控制系統的抗干擾能力較差。文獻[6]研究了液壓挖掘機單片機控制方法,給出液壓挖掘機模型設計的總體方案,分析了控制系統的硬件和軟件,采用單片機邏輯控制方法,從而提高挖掘機工作效率。文獻[7]采用模糊自整定神經網絡算法對兩自由度小型電液挖掘機進行控制,建立了二自由度小型電液挖掘機的數學模型,針對圓軌跡跟蹤問題,設計了模糊PID控制方法,它的兩個環節由電動機控制的泵系統驅動,該控制器比傳統控制器具有更好的控制性能。以往研究的挖掘機控制方法,控制精度較低,很難滿足挖掘機執行高精度任務的要求。對此,本文對傳統PID控制方法進行改進。創建挖掘機液壓驅動裝置簡圖模型,推導出液壓缸負載流量方程式。在傳統PID控制基礎上,設計了RBF神經網絡PID控制器。通過MATLAB軟件對液壓驅動活塞跟蹤誤差進行仿真,為提高液壓挖掘機運動軌跡精度提供參考價值。
1 挖掘機液壓驅動數學模型
本文采用液壓驅動挖掘機手臂,其結構簡圖如圖1所示。

圖1 挖掘機液壓驅動裝置
液壓驅動采用伺服閥控制,其傳遞函數為式(1)~式(5)[8]。
式中:ksy=Ki/(LCk)為位移增益,Ck為擋板彈簧剛度系數,L為擋板長度,Ki為力矩馬達力矩常數,Cl為流量系數,Ps為進油壓力,KQ為伺服閥流量增益,A為閥芯端面積,Pl為負載壓力,J0為擋板轉動慣量,M0為閥芯質量,Ckm為力矩電機彈性力矩系數,x0、A0為閥芯中位值,ξv為閥芯阻尼比。
伺服閥閥口流量表達式為式(6)、式(7)。
式中:Q1為進口流量,Q2為出口流量,Cd為剛度系數,P1為進口壓力,P2為出口壓力,Ps為進油壓力,X為伺服閥閥芯位移,ρ為液體密度,T為窗口面積梯度。
負載流量表達式[8]為式(8)、式(9)。
式中:n=A2/A1為流量比,PL=P1-P2為負載壓力。
2 RBF神經網絡PID控制
2.1 PID控制器
傳統PID控制器根據輸入值與輸出值之差反饋來調節比例、積分和微分系數,從而提高控制對象輸出精度,其控制過程如圖2所示。
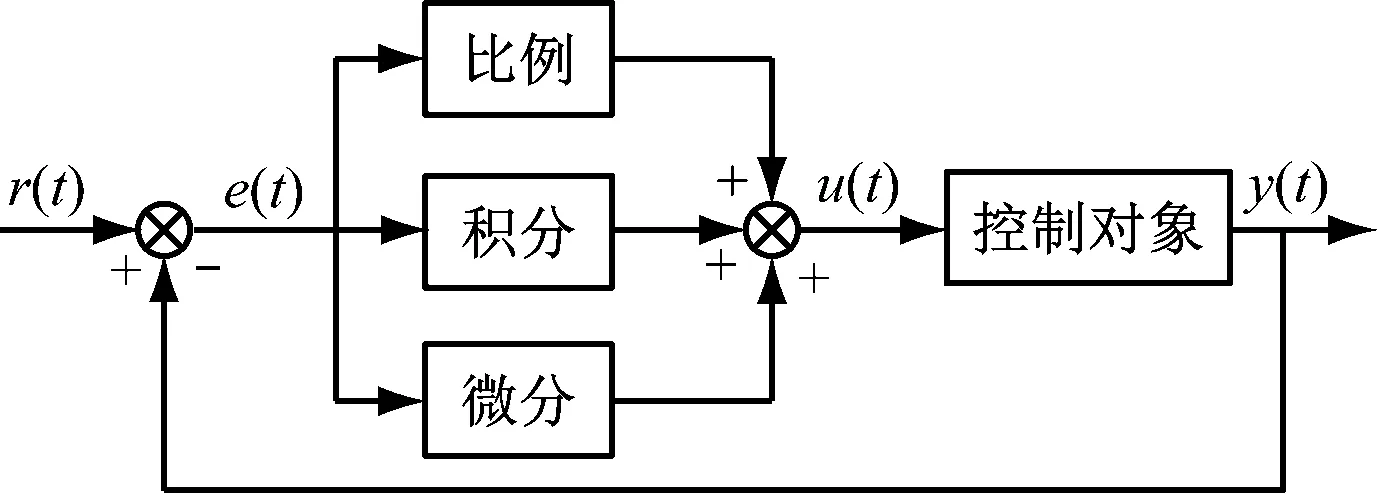
圖2 PID控制流程
PID控制在線調整方程式[9-10]為式(10)。
(10)
式中:kp為比例系數;ki為積分系數;kd為微分系數。
采用PID控制器,其反饋誤差方程式為式(11)。
e(t)=r(t)-y(t)
(11)
式中:r(t)為輸入值;y(t)為輸出值。
2.2 RBF神經網絡PID控制
徑向基函數縮寫為RBF,RBF神經網絡結構分為三層,分別為輸入層、隱含層和輸出層,其網絡結構如圖3所示。
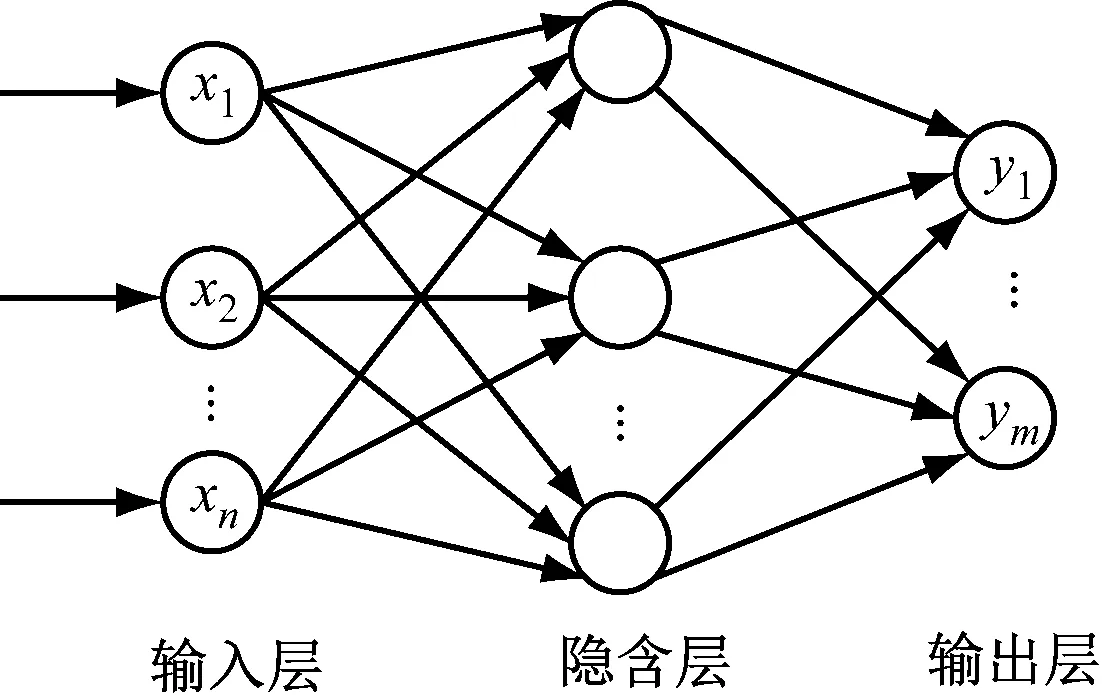
圖3 RBF神經網絡結構
在圖3中,隱含層采用高斯基函數,其方程式為[11-13]為式(12)。
(12)
式中:ui(x)為隱含層第i個節點的輸出,X為輸入向量,cj為隱含層中心矢量,bj為隱含層基寬度。
采用RBF神經網絡PID控制挖掘機液壓活塞流程如圖4所示。
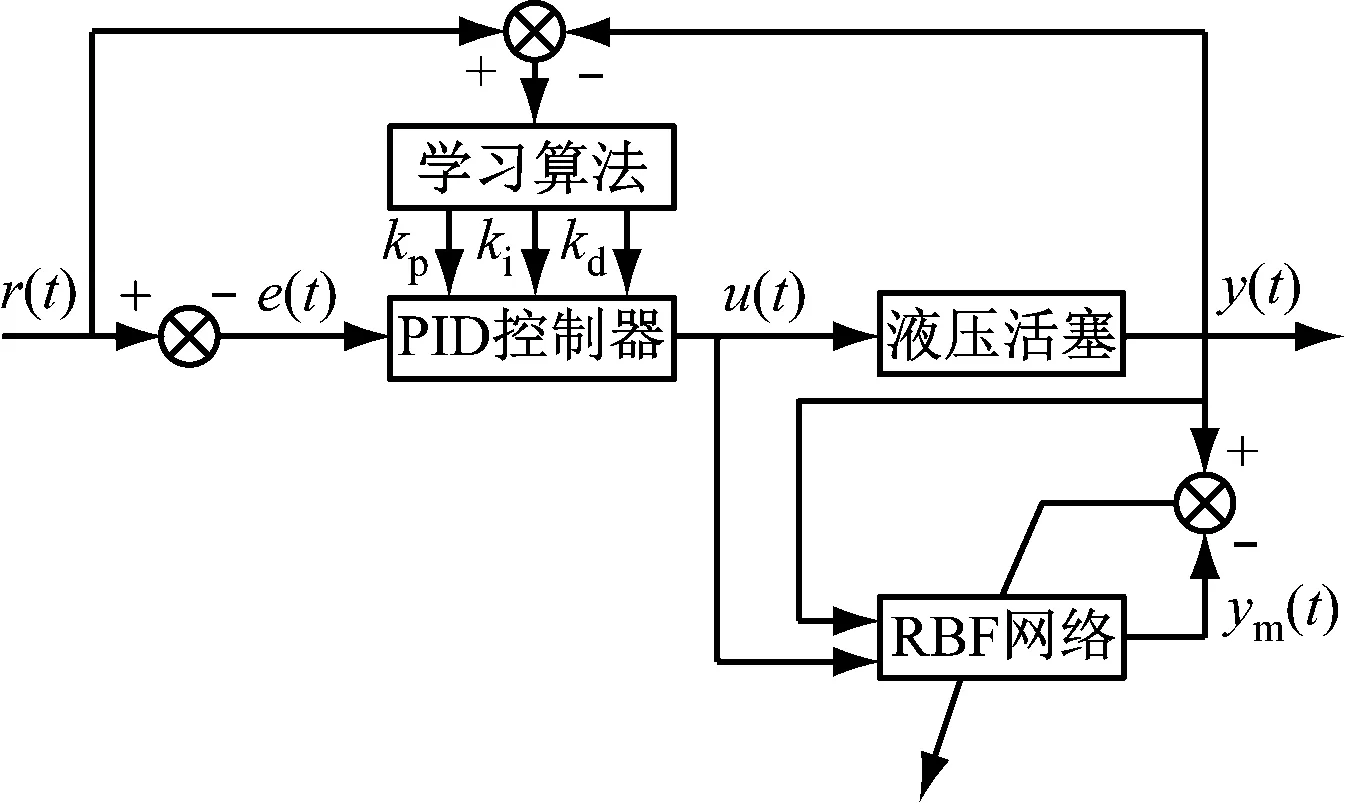
圖4 挖掘機液壓活塞控制流程
具體操作步驟如下。
1) 初始化RBF神經網絡結構,設置節點中心、調整權值和節點寬度初始值;
2) 在線采集參數u(k)、y(k)、ym(k),計算不同時刻輸出誤差y(k)-ym(k),反饋給輸入信號;
3) 將誤差信號傳遞給RBF神經網絡結構,調整RBF辨識網絡節點、權值和節點寬度;
4) 采用梯度下降法計算Δkp、Δki、Δkd,調整PID控制器的kp、ki、kd參數,輸出u(k);
5) 若滿足條件,則輸出ki、kp、kd參數,否則,更新調整參數,返回步驟2),重新迭代學習。
3 仿真與分析
挖掘機液壓驅動活塞運動位移控制精度直接影響到手臂定位精度。本文采用MATLAB軟件分別對PID控制和RBF神經網絡PID控制誤差進行仿真驗證。仿真初始參數設置如下:學習速率η=0.35;動量因子α=0.05;PID控制器初始調節參數為kp=15、ki=8、kd=0.03。假設挖掘機液壓驅動活塞運動角位移為x=4sin2πt,則采用PID控制和RBF神經網絡PID控制輸出誤差分別如圖5、圖6所示。
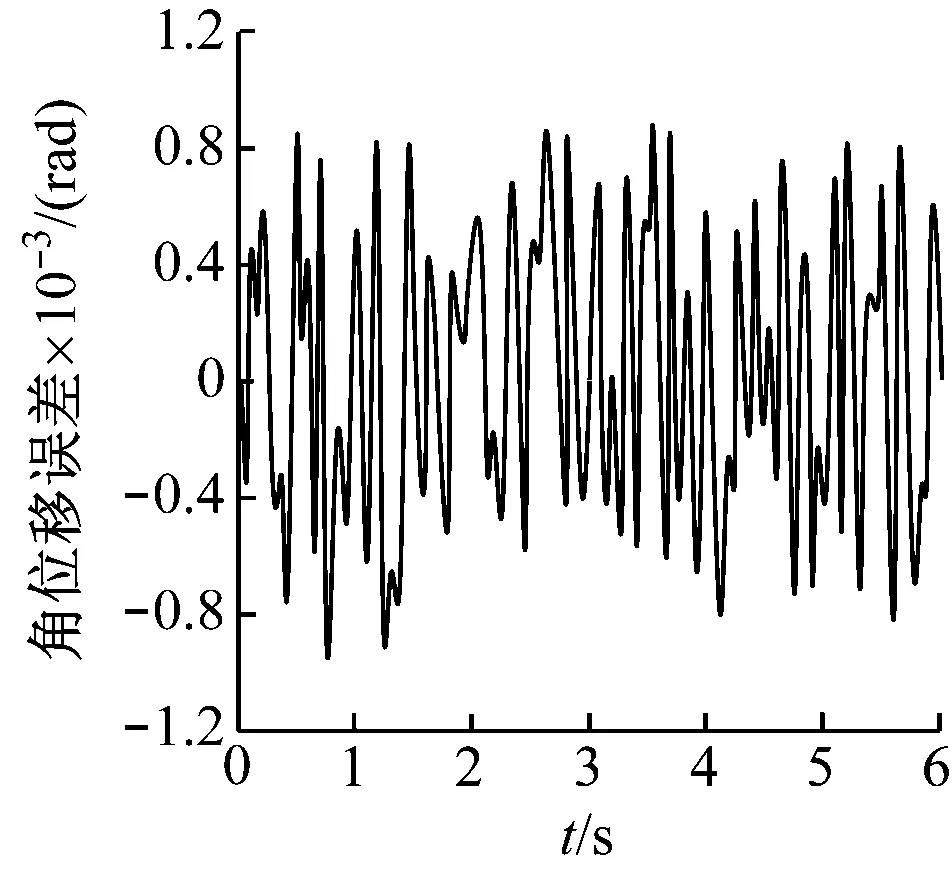
圖5 PID控制角位移誤差
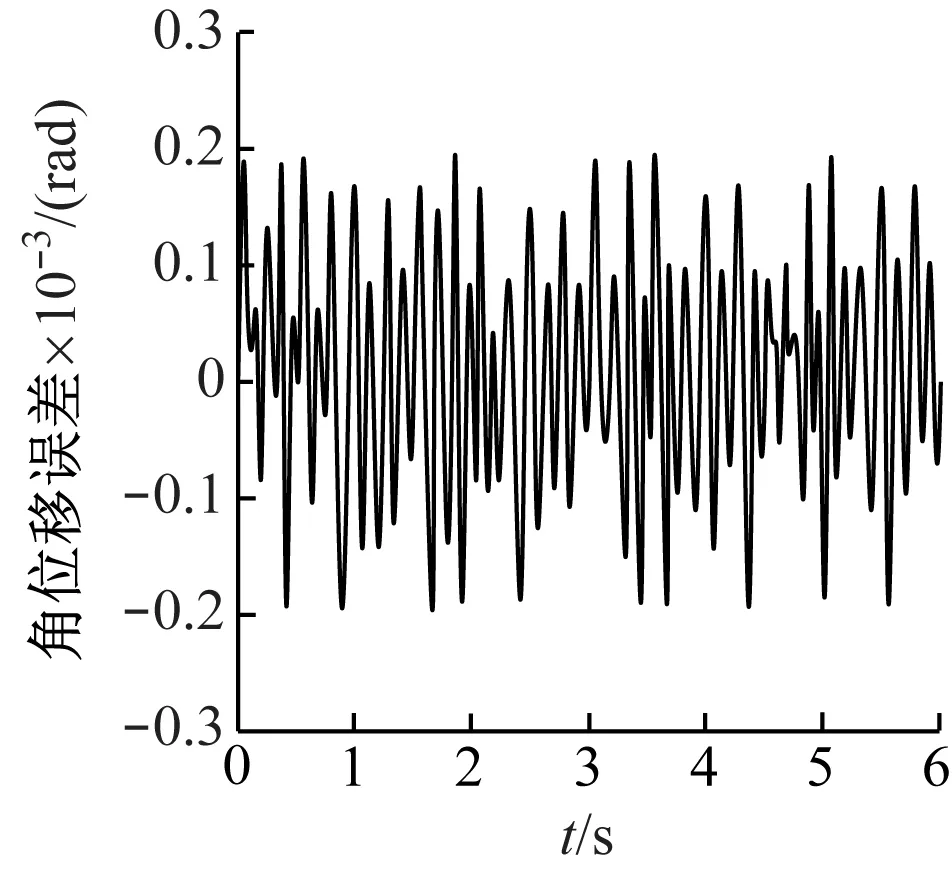
圖6 RBF神經網絡PID控制角位移誤差
由圖5可得:采用傳統PID控制器,挖掘機液壓驅動活塞運動角位移產生的最大誤差為0.95×10-3rad。由圖6可得:采用RBF神經網絡PID控制器,挖掘機液壓驅動活塞運動角位移產生的最大誤差為0.19×10-3rad。因此,采用RBF神經網絡PID控制器,挖掘機液壓驅動活塞定位誤差較小,可以精確完成挖掘機手臂運動軌跡的跟蹤任務。
4 總結
本文采用RBF神經網絡PID控制液壓挖掘機運動軌跡,并對控制角位移誤差進行仿真。主要結論如下:
1) 采用簡圖模型創建挖掘機模型,可以簡化研究過程,使復雜結構簡單化,便于推導挖掘機流量運動方程式。
2) 傳統PID控制器,容易受到外界環境因素的干擾,產生的角位移誤差較大,最大誤差為0.95×10-3rad,而RBF神經網絡PID控制器能夠抑制外界環境因素的干擾,產生角位移誤差較小,最大誤差為0.19×10-3rad。RBF神經網絡PID控制輸出角位移最大誤差明顯低于傳統PID控制器,控制精度較高。
2) RBF神經網絡PID控制器,結合神經網絡和PID控制器二者的優點,將誤差反饋給神經網絡,通神經網絡迭代算法,能夠在線調整PID控制參數,使系統輸出誤差波動幅度較小,從而保持控制系統的穩定輸出。除此之外,RBF神經網絡PID控制還可以用于其它領域控制。