基于動態網格密度的SNN聚類的ET-GM-PHD濾波算法*
2019-08-22 07:16:12王杰貴朱克凡
彈箭與制導學報 2019年2期
彭 聰,王杰貴,朱克凡
(國防科技大學電子對抗學院, 合肥 230037)
0 引言
在經典的多目標跟蹤算法中,由于雷達等傳感器分辨率較低,通常目標視為點目標進行跟蹤,此時只考慮跟蹤目標的運動信息,而未包含目標的外形信息。近年來,隨著傳感器技術的提升,運動目標在一個采樣周期里不再只返回一個量測值,這種在同一時刻能夠得到至少一個量測值的目標稱為擴展目標。擴展目標可以由運動狀態(位置、速度和加速度等)和擴展形態(大小、形狀和朝向)共同表征,擴展目標跟蹤就是基于傳感器得到的信息,利用相應的信號處理方法,對擴展目標的運動狀態和擴展形態進行精確估計的過程。
傳統的多目標跟蹤算法如聯合概率數據關聯算法、多假設跟蹤算法等都依賴于數據關聯,這類算法會帶來“組合爆炸”問題[1],復雜的多維計算會增加算法的運行時間,影響跟蹤性能。基于隨機有限集的多目標跟蹤算法規避了數據關聯,有效的解決了“組合爆炸”問題。隨機集理論是Matheron于上世紀七十年代提出的,主要應用于幾何方面,在上述基礎上, Mahler提出了有限集統計特性理論,它是隨機集的一種特例,將隨機變量的統計理論延伸到了隨機集合(random finite set, RFS),并率先將RFS理論應用于多目標跟蹤領域。RFS框架下的多目標跟蹤利用Bayes法則傳遞目標的概率密度,但是算法中的積分為集值積分,很難求解。做為一種近似的濾波方法,概率假設密度(probability hypothesized density, PHD)濾波器被提出來,它傳遞的目標概率密度的一階統計近似矩。2009年,Mahler將PHD濾波技術應用于擴展目標領域,并給出了擴展目標PHD(extended target PHD, ET-PHD)濾波器的更新方程[2]。2010年,Granstrom等學者給出了ET-PHD的高斯混合實現形式,即ET-GM-PHD濾波[3]。
擴展目標跟蹤面臨的首要問題就是量測集的劃分,文獻[4]中提出了一種基于距離的劃分方法,該方法對空間上距離較遠且量測比較密集的情況跟蹤效果較好;文獻[5]提出k-means劃分方法,其劃分準確度好于距離劃分,但是本質上,以上兩種劃分方法都是基于距離劃分的,在量測密度差距較大的環境下,兩者劃分效果不理想。針對此問題,文獻[6]提出了一種基于SNN相似度的量測劃分方法,該方法對量測密度不敏感,但存在計算量偏大的不足。
本文在文獻[6]的基礎上,提出了基于動態網格密度的SNN相似度劃分算法,該算法首先通過動態網格計算量測集的密度分布情況,利用雙閾值對量測集進行雜波濾除;然后根據SNN相似度對處理后的觀測數據進行劃分,以達到節省計算時間,提高跟蹤穩定性的目的。
1 ET-GM-PHD濾波技術
1.1 ET-PHD濾波技術
ET-PHD濾波算法的預測步和標準的PHD濾波算法預測步一致,其更新方程是預測強度vk|k-1(x)和一個量測偽似然函數LZ(x)的乘積形式,下面給出ET-PHD濾波算法的具體形式[7]。
1)預測部分
設k-1時刻的后驗強度為vk-1,則ET-PHD預測強度為:
βk|k-1(xk|xk-1)]vk-1(xk-1)dxk-1
(1)
式中:γk(xk)表示k時刻新生目標的RFS的強度函數;pS,k(xk-1)為目標在k時刻存活的概率;fk|k-1(xk|xk-1)為k時刻單目標的轉移概率密度;βk|k-1(xk|xk-1)表示衍生目標的強度。
2)更新部分
假設k時刻的預測強度vk|k-1(x)和量測集Zk,且量測個數服從Poisson分布,ET-PHD更新方程為:
vk(x)=LZ(x)vk|k-1(x)
(2)
LZ(x)是量測的偽似然函數:
LZ(x)=1-(1-e-γ(x))pD(x)+
(3)
式中:γ(·)表示擴展目標所產生的量測值的均值;pD(·)為目標被檢測概率;p∠Zk表示p為量測集合Zk的一個劃分子集;ωp為劃分p的權值;|W|為子集W內元素的個數;dW為觀測子集W的非負系數;φz(x)為擴展目標量測的似然函數;λk為單位空間內的雜波個數;ck(zk)為雜波的分布函[8]。
1.2 ET-GM-PHD濾波技術
由于ET-GM-PHD濾波算法和標準的GM-PHD濾波算法的預測步和更新步一致,因此文中只給出標準GM-PHD濾波算法的預測和更新方程。
GM-PHD濾波器滿足以下假設條件:
1)每個目標的運動模型和量測模型均為高斯線性的,即:
fk|k-1(x|xk-1)=N(x;Fk-1xk-1,Qk-1)
(4)
gk(z|x)=N(z;Hkxk,Rk)
(5)
2)目標的生存概率和檢測概率與目標狀態相互獨立,即:
pS,k(x)=pS,k
(6)
pD,k(x)=pD,k
(7)
(3)新生目標的RFS強度為高斯混合形式,即:
(8)
基于以上假設,GM-PHD濾波器的預測步可表示為:
(9)

更新步可表示為:
(10)
1.3 擴展目標量測劃分問題
從上述例子可見,量測值的增加將使得量測集的劃分數迅速增加,影響跟蹤的實時性,因此尋找準確快速的量測劃分方法是ET-GM-PHD濾波中的重要一步。針對這個問題,提出了基于動態網格密度的SNN相似度的量測劃分算法。
2 基于動態網格密度的SNN相似度量測劃分方法
在SNN算法的基礎上,利用動態網格技術對量測數據進行預處理,從而達到減小算法運行時間,提高跟蹤精度的效果。
2.1 基于動態網格密度的量測集預處理
定義1:網格單元:數據空間中的每一維均勻的分成若干等分,從而將數據空間劃分成若干個互不相交的超矩形單元,這樣的單元稱為網格單元。采用動態網格劃分,根據每一時刻數據點的數量來決定網格的劃分數[9]:
K=(Nz,k(1-γ))1/d
(11)
式中:Nz,k表示k時刻量測集的個數z,γ表示數據壓縮率,d表示數據的維數。
定義2:網格單元的中心與重心。設一個網格中有m個數據點b1,b2,…,bm,該單元的中心點Uc是一個d維的向量(uc1,uc2,…,ucd),uci=(li+hi)/2,li和hi分別表示網格單元第i維的最小值和最大值;重心點Ub是一個d維的向量(ub1,ub2,…,ubd),ubi=(b1i+b2i+…+bmi)/m。
定義3:網格單元密度。網格單元中數據點的個數用den(C)表示。
2.1.1 改進的密度閾值的選取
密度閾值的選取是區分量測和雜波的關鍵,在利用式(11)對數據空間進行動態網格劃分后,選擇合適的密度閾值,對量測劃分結果的影響很大。傳統的方法中主要利用單密度閾值來判斷高低密度網格,該方法具有明顯的不足:密度閾值選取偏大時,會將量測和雜波一同濾除;密度閾值選取偏小時,則會認定雜波為量測。鑒于此,文中借鑒平均密度的思想,采用雙密度閾值對量測和雜波進行區分,在原有密度閾值的基礎上,添加一個核心密度閾值[10]。
假設G為生成的網格數量,den(Ci)為網格單元密度,max(den(Ci))表示密度最大的網格單元,min(den(Ci))表示密度最小的網格單元,有如下定義,密度閾值ε:
(12)
核心密度閾值ε′:
(13)
定義den(Ci)≥ε′的網格為核心網格,den(Ci)≥ε的網格為高密度網格,den(Ci)≤ε的網格為低密度網格,核心網格也是高密度網格。在濾除雜波的過程中,將含有核心網格的高密度網格區域認定為量測,不包含核心網格的高密度網格區域和低密度網格區域認定為雜波[11]。
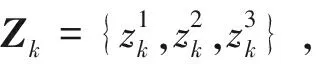
2.1.2 移動網格邊界優化技術
為了使量測值和雜波劃分結果更準確,需要對邊界信息進行處理。問題描述如圖1(a),單元中C點和B點同屬于量測值,但由于密度閾值的設置,處于低密度網格中的C點將被當作雜波被濾除。為了避免這種情況發生,文中采用移動網格邊界優化技術[12],對低密度網格以及不含核心密度的高密度區域中的數據點進行處理。掃描需要處理的網格中的數據點,以網格重心為中心,依據式(11)劃分的網格邊長建立新的網格,若新建網格的密度den(Cj)≥ε′,則保留網格中的數據點,將其歸為量測值。如圖1(b)中所示,以C點為中心建立新的網格,此時den(Cj)≥ε′,故將C認定為量測,避免了上述問題中將邊界量測點C歸為雜波的情況。為了保證算法的運行效率,移動網格邊界優化步驟只執行一次。
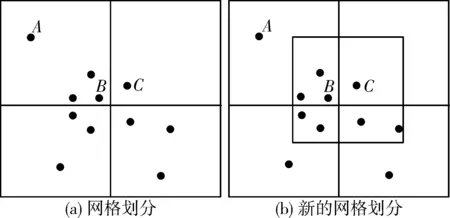
圖1 移動網格邊界優化
2.1.3 雜波濾除預處理
基于動態網格密度量測集預處理的步驟如下:
步驟2:將全部數據映射到已劃分的網格單元中,計算網格的密度;
步驟3:根據式(12)、式(13)得到的密度閾值和核心密度閾值對網格進行雜波濾除;
步驟4:利用移動網格邊界優化技術,對邊界值進行提取,保留符合要求的邊界值。
為驗證動態網格雜波剔除效果,進行了雜波濾除仿真實驗,圖2是在γ=0.5的情況下得到的雜波剔除仿真圖。圖2(a)是量測圖,有3個高密度區域為量測點集合;圖2(b)是經過雙密度閾值濾波后得到的效果圖,從圖中可以看到,由于右下角量測集網格密度小于核心密度,被視為雜波剔除了;圖2(c)是經過移動網格邊界優化技術處理后的仿真圖,原來被視為雜波處理的量測集經過移動網格邊界優化后,重新被認定為量測值。經過動態網格濾波后,雜波占比由原來的37.7%降低至8.1%,雜波剔除效果比較明顯。
圖2 動態網格雜波剔除
2.2 基于SNN相似度的量測劃分算法
2.2.1 SNN相似度
針對不同擴展目標產生量測密度差異較大的情況,引入共享最近鄰(SNN)相似度的概念,以SNN相似度為劃分指標,對擴展目標量測集進行量測劃分。

各詩家的詩選本無疑都蘊含著自己的詩學理想和個人偏向,沈德潛選詩自然也不例外。沈德潛作詩主張“格調說”,“格調說”由明前后七子提倡,在當時及清初都備受批判,沈德潛重新關注并發揚光大,成為了影響世人創作的重要思想主張。“格調說”提倡“格高調響”,在創作上提倡發揚詩教傳統,對“溫柔敦厚”“教化人倫”“合乎風雅”之詩格外看重。《別裁》作為沈德潛的代表作,必然浸潤著“格調說”的種種主張。在初刊本的序中,沈德潛提到了詩選本的重要性:
簡而言之,當兩個量測點共同包含一定數目的最近鄰點時,則認定這兩個量測點相似。
SNN相似度劃分算法中需要對K值進行設定,K值的設定范圍是依據實驗結果統計得到的,文中采用文獻[4]的統計結果,如表1所示:
表1 參數K的設定范圍
SNN相似度的具體計算步驟如下:
初始化k;
令Xun=X;
計算數據集X的距離矩陣;
IfXun≠?,則
{任意選擇一個x∈Xun;
計算x的k-鄰域Vk(x)={x1,x2,…,xk},
其中x1,x2,…,xk是x的k-鄰域中的數據點
Fori=1,i≤k
{ifx∈Vk(xi) 則
SNN(x,xi)=Vk(x)∩Vk(xi);
else SNN(x,xi)=?;}
Xun=Xun-Vk(x);}
End If
2.2.2 基于SNN相似度的劃分算法具體實現步驟
SNN相似度代表了兩量測點的k-鄰域之間共同量測點的個數,基于SNN相似度的量測集劃分方法將SNN相似度大于一定相似度閾值sl的量測歸于同一簇中,實現步驟如下:
步驟1:量測集經過預處理后,統計量測集內每兩個量測點之間的歐式距離;
步驟2:根據步驟1得到的統計結果,找到每個量測值的K個最近鄰點,計算每兩個量測點之間的SNN相似度;
步驟3:根據SNN相似度,建立n維的SNN相似度矩陣N,n為量測點的個數,如圖3所示。
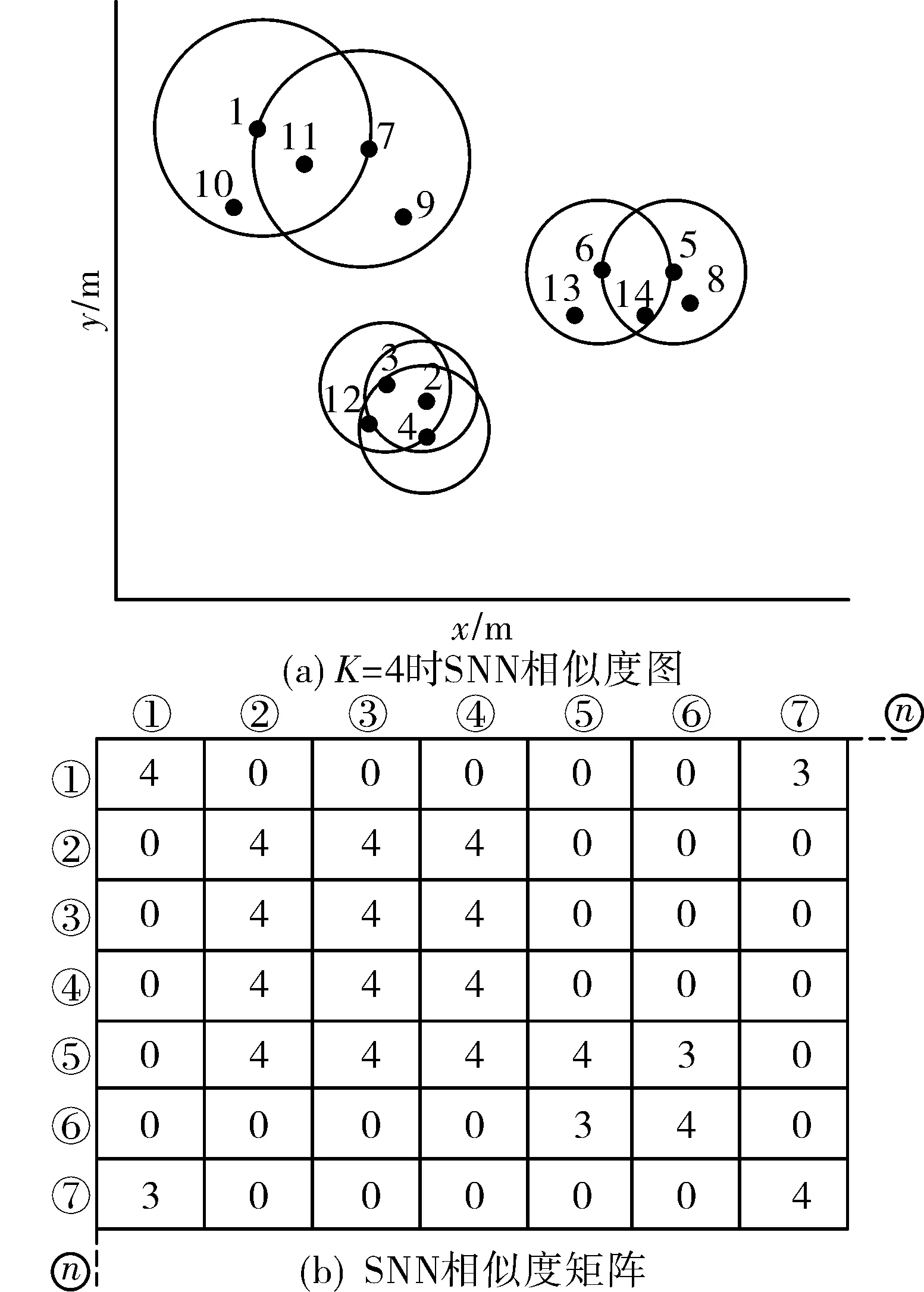
圖3 構建SNN相似度矩陣
步驟4:選擇相似度閾值sl,sl從0到K-1內選取,選取不同的閾值sl得到不同的劃分結果,共K種劃分結果。文中未討論如何選取sl得到正確的劃分結果,根據實驗仿真劃分統計結果,選取K/2作為相似度閾值sl。
步驟5:保留≥sl的SNN相似度,用1表示,其余的用0表示,形成矩陣Sth,對于圖2(b),選取sl=2,可表示為圖4,將矩陣Sth中同一個的1連通域對應的量測置于同一個簇,連通域的個數即為簇的個數。
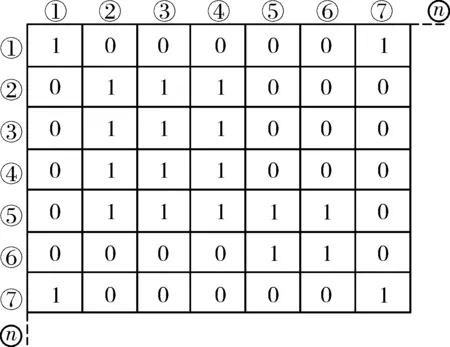
圖4 SNN相似度矩陣Sth
圖5分別是采用k-means算法和基于SNN相似度劃分算法的結果。從圖5(a)中可以看到,k-means算法將目標1劃分成了兩個簇,并且和目標2混淆了;圖5(b)是基于SNN相似度劃分的劃分結果,與正確的劃分結果一致,參數K=6,sl=3。

圖5 k-means劃分和SNN相似度劃分效果圖
3 仿真實驗與分析
文中采用ET-GM-PHD濾波器,對量測密度相差較大的幾個擴展目標進行跟蹤,對提出的基于動態網格密度的SNN相似度劃分算法和傳統的k-means劃分算法進行跟蹤性能的比較。
3.1 仿真場景設置

(14)
擴展目標的量測方程可表示為:
(15)
式中:量測噪聲vk是均值為0,協方差Rk=(20 m/s)2I2的高斯白噪聲,且目標產生的量測互不相關。
3.2 仿真結果分析
為了驗證文中提出的算法的特性,本次實驗進行100次蒙特卡洛仿真,和傳統的基于k-means劃分的多擴展目標PHD濾波進行對比,PHD濾波器采用高斯混合的實現形式。仿真結果如下。
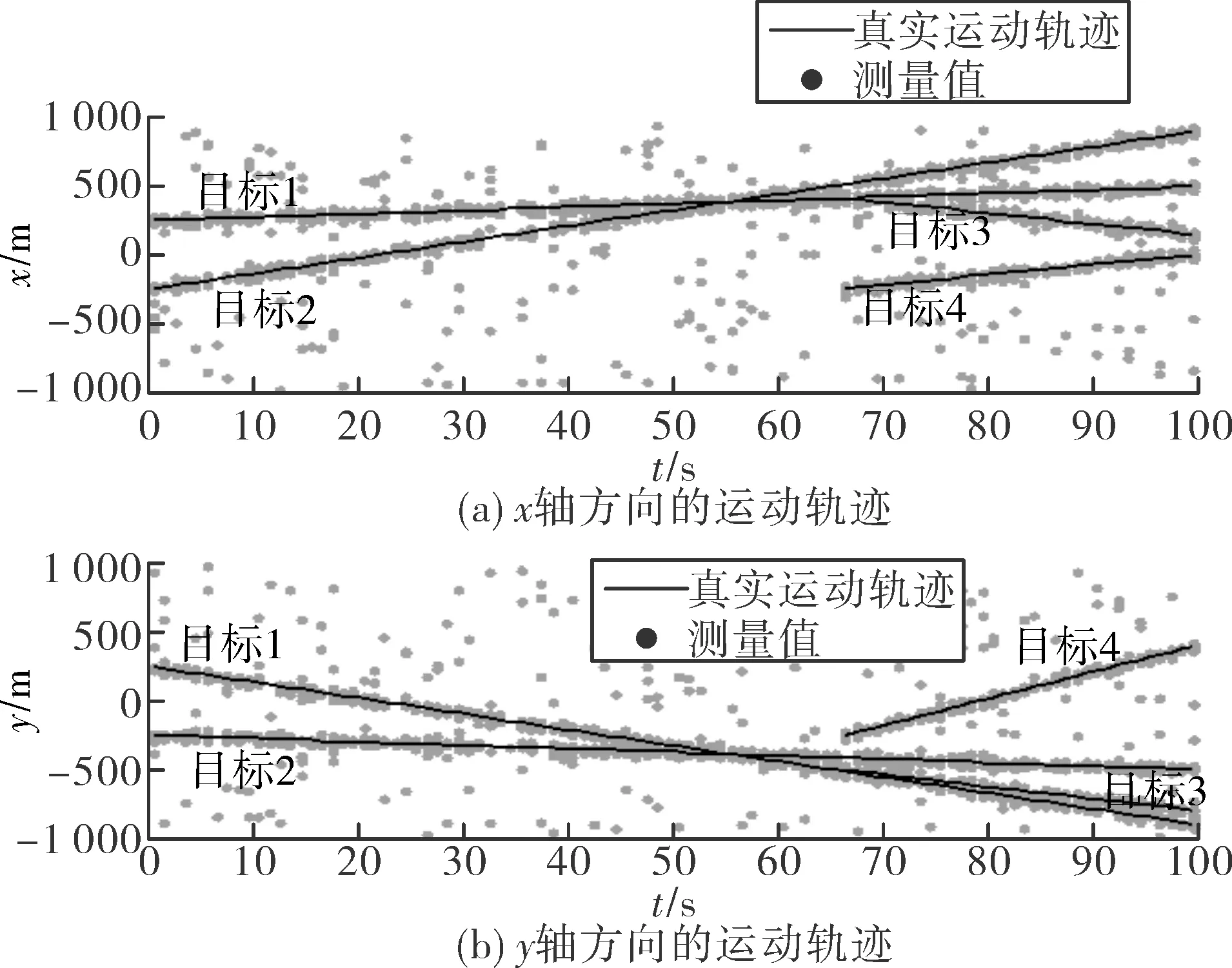
圖6 目標和雜波態勢圖
圖6顯示的是目標和雜波的態勢圖,目標產生量測個數和雜波個數均服從泊松分布,仿真場景中共4個目標,目標1,2的量測密度服從λ=10的泊松分布,目標3,4的量測密度服從λ=30的泊松分布,目標初始狀態和始末時間如表2所示,雜波個數服從λ=10的泊松分布。
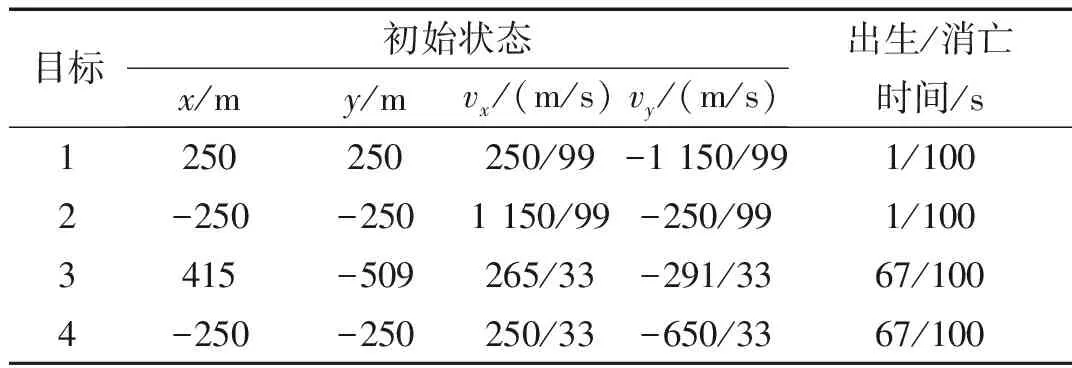
表2 目標初始狀態和始末時間
圖7給出了兩種算法的平均運行時間,從圖中可以看出,相較于傳統的基于k-means劃分的PHD算法,文中提出的算法在運行時間上減少了30%~40%,這是因為在量測劃分階段前進行了動態密度網格濾波,將大量的雜波剔除,減少了計算機對雜波的無效計算時間。
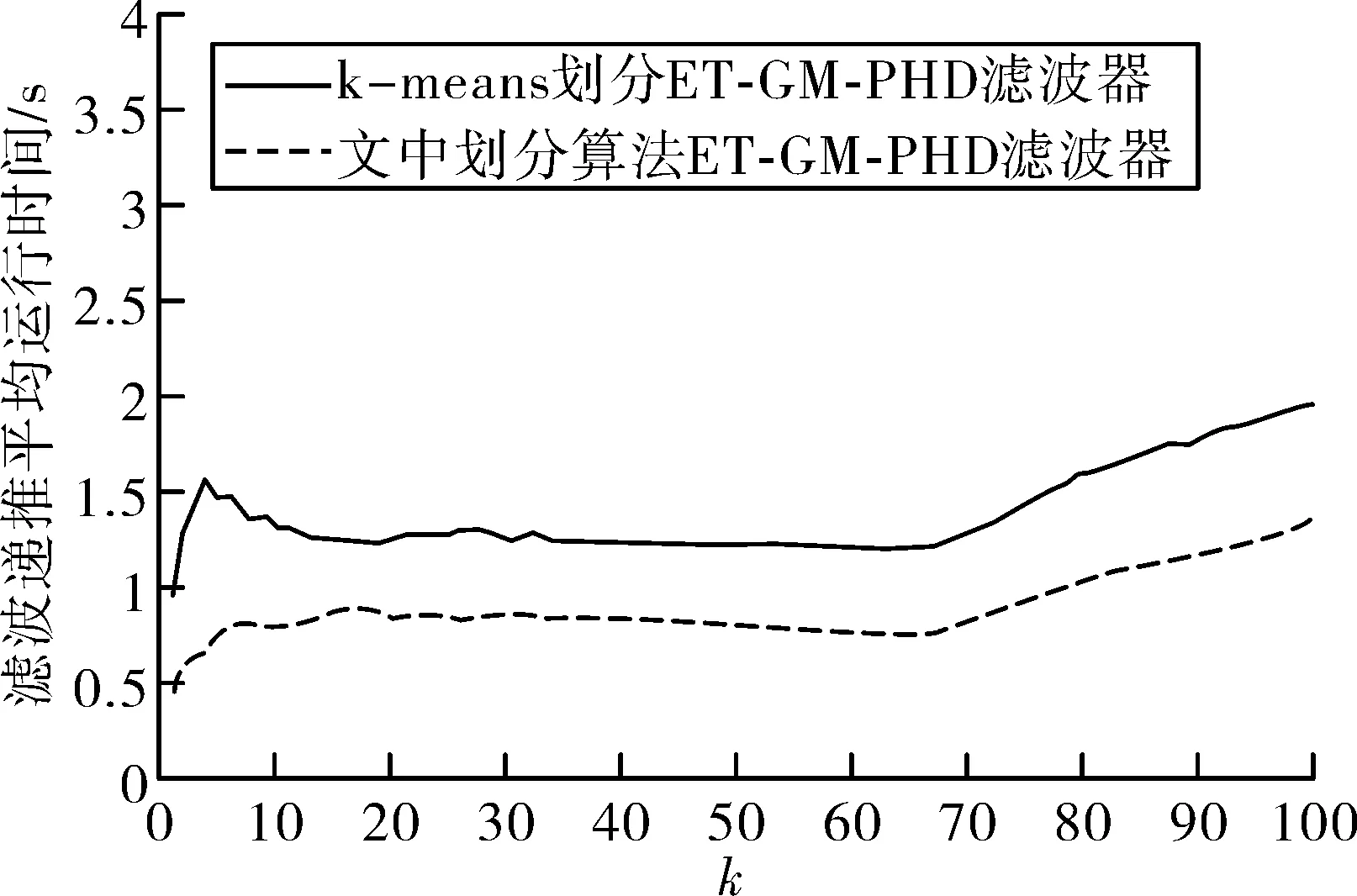
圖7 算法平均運行時間
圖8是兩種算法對目標數估計的仿真圖。如圖中所示,兩種算法在目標交叉,產生新生目標和衍生目標時都會發生目標個數的錯誤估計,但是文中算法發生誤判的時間較短,這是因為基于SNN相似度的劃分算法不再以距離為聚類標準,對于本實驗中密度相差較大的量測集的劃分效果要比k-means算法好,只有在目標極為接近時,才會導致本算法錯誤劃分量測集。
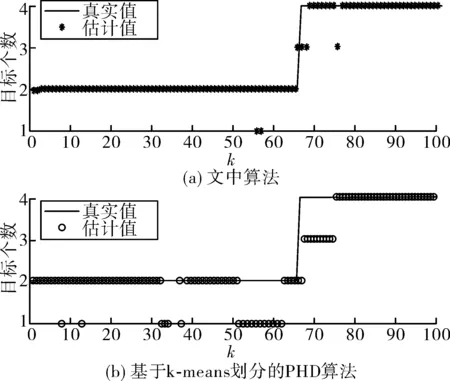
圖8 目標估計個數比較
圖9給出了兩種算法的OSPA距離圖,OSPA距離[15]是隨機有限集框架下的多目標跟蹤算法的性能評價指標,公式定義如下:
(16)
c為勢誤差與狀態誤差調節因子,p決定了對異常值的敏感性。本實驗中c=10,p=2。如圖9(b)所示,本算法的OSPA距離僅在56 s,67 s,77 s時刻左右出現了較大波動,波動時間較短,而傳統算法的OSPA距離波動次數較多,持續時間較長,這說明文中所提出的算法在對多擴展目標進行跟蹤時,有較好的穩定性。圖中出現較大波動均是在目標數目估計出現誤差的情況下發生的,因此OSPA曲線也可以反應目標數目的變化。
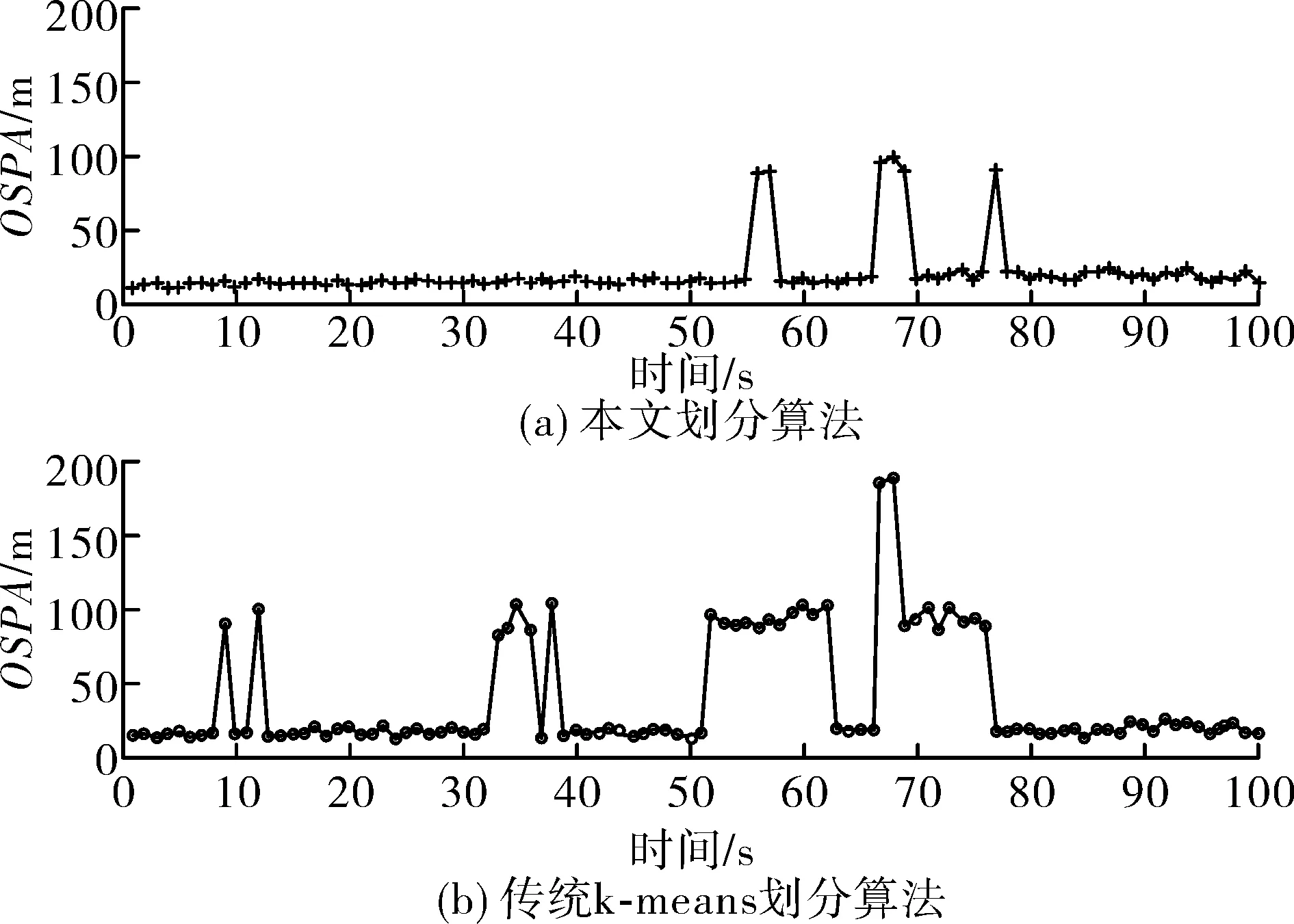
圖9 兩種算法OSPA比較
綜上所述,文中提出的算法在對量測密度差異較大的擴展目標跟蹤時,所用時間節省了30%~40%,跟蹤穩定性也好于傳統算法。
4 結束語
針對擴展目標產生量測密度差異較大的情況,文中提出了一種基于動態網格密度的SNN相似度的劃分算法,對比于傳統的劃分算法,文中算法在降低計算時間的同時,保證了跟蹤過程的穩定性和精確性,為擴展目標PHD濾波算法提供了一種新的劃分方法。下一步將對算法中參數sl的選擇問題進行研究。
