多機協同探測傳感器管理*
2019-08-22 06:18:12許蘊山夏海寶王俊迪
彈箭與制導學報 2019年2期
王 楠,許蘊山,夏海寶,王俊迪
(1 空軍工程大學航空機務士官學校,河南信陽 464099;2 空軍工程大學, 西安 710038)
0 引言
在空戰中,形成空中優勢與奪取制空權是現代空戰主要的兩大任務,其中,增大作戰體系的最大同時攻擊目標數目與最大同時跟蹤目標數目是作戰體系的關鍵需求[1],機載傳感器作為獲取戰場信息的關鍵裝備,能否對其進行有效管理以滿足作戰體系攻擊與跟蹤需求,成為多機協同作戰體系信息獲取的關鍵所在[2]。文中針對典型的多機協同作戰傳感器系統應用問題進行研究,為完成多機協同作戰任務提供支持。在多機協同作戰傳感器管理中,首要問題便是根據具體的作戰任務分解出機載傳感器的具體任務[3],傳感器任務主要包含:
1)達到待攻擊目標的跟蹤精度要求;
2)存在威脅目標的穩定跟蹤精度要求;
3)保持對新生目標的及時發現。
多機協同作戰傳感器管理是多傳感器系統管理的一個重要應用,在現代空戰環境中綜合管理各個傳感器并使之形成高效的傳感器系統是該應用的重要研究內容。文獻[4]研究了傳感器管理的結構與微觀傳感器管理,就形成了當前比較常用的宏觀/微觀式雙層結構,但并未給出總體的管理框架。文獻[5]針對傳感器資源有限的問題,建立了傳感器目標的代價函數矩陣,進而利用線性規劃的方法對所跟蹤目標進行傳感器資源的最優分配,缺乏分配完成后傳感器自身的資源管理。
文中將傳感器管理的輸入信息,即當前狀態劃分為平臺狀態和傳感器信息狀態,并根據兩類狀態輸入,結合線性規劃以及MAB模型的UCB算法進行傳感器的協同控制,最終給出基于當前狀態的傳感器管理優化算法。
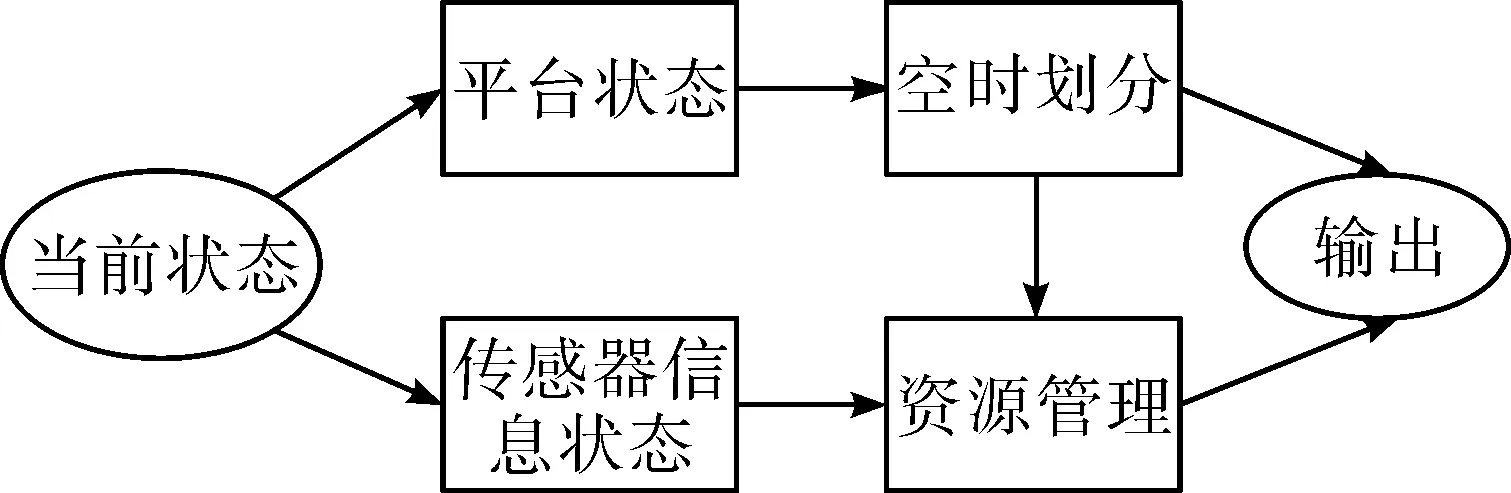
圖1 系統管理框架
1 多機協同作戰場景分析
Alfred O. Hero III在文獻[6]中指出,用控制論的觀點可以將傳感器管理看作是在優化控制一個狀態,通過選擇測量策略,選擇出離散信息以及傳感器組合,把控制對象分割為物理動態和信息動態。如圖2所示。
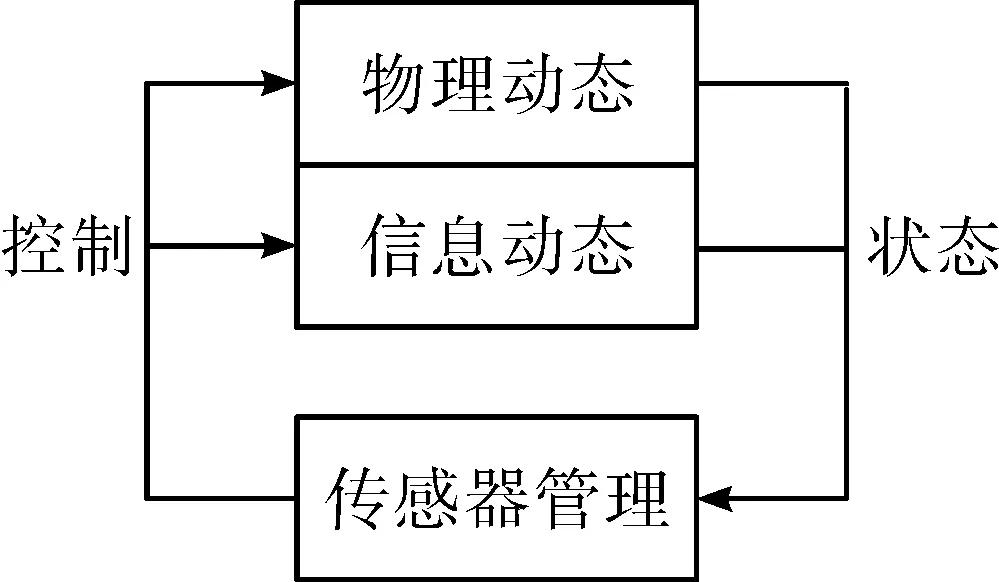
圖2 動態控制
文中借鑒該思想,將傳感器平臺的運動變化考慮為物理動態,傳感器與目標之間的信息交互看作信息動態。著眼于兩類動態的巨大差異,才相應的提出了該雙層優化管理方法。
兩個層次其內涵分別是空時劃分與資源管理,其中空時劃分是基于當前空中各平臺的位置或運動狀態即物理動態進行劃分的,相較于文獻[7]分配對象增加了時間資源的劃分,由于平臺狀態的變化相對較慢,因此劃分是在靜態狀態下完成優化的;而傳感器資源管理是建立在當前傳感器與目標的信息交互狀態上的,其管理時間往往是毫秒級的,因此在資源管理的時間維度上,可以認為空時劃分是靜態的,在獲得空時劃分結果后,再進行相應的資源管理。
2 傳感器管理模型
2.1 模型基礎
首先對與傳感器管理相關場景所包含的各類變量進行說明,如表1。
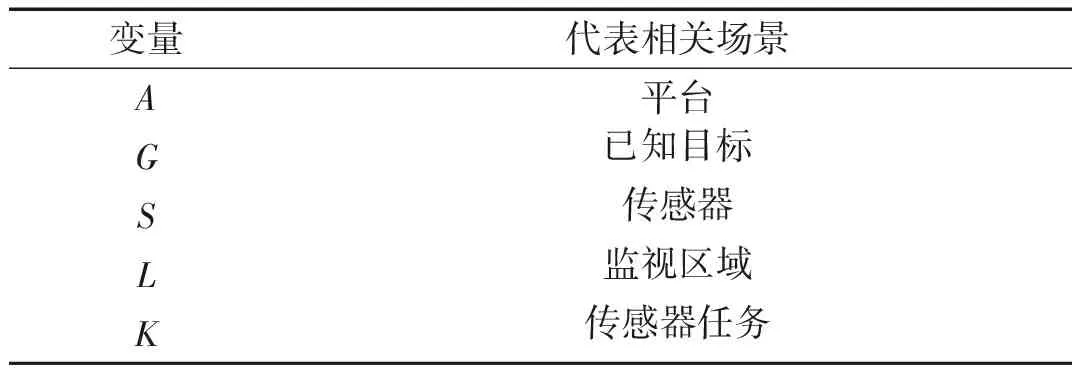
表1 變量說明
假設條件:
1)將區域邊緣劃分為若干個檢測單元,只考慮目標可能出現在邊緣檢測單元的檢測問題,通常區域內的檢測性能肯定好于邊界;
2)在物理動態更新的周期T內,新目標始終在一個檢測單元之中;
3)只考慮傳感器獲取信息功能,未考慮隱蔽與抗干擾問題。
2.2 物理動態控制
2.2.1 任務需求
根據傳感器自身任務需求,傳感器必須在滿足攻擊或跟蹤目標的精度要求的條件下,保持較高的新生目標發現性能。在一個物理動態周期內,目標或檢測單元的信息增益與傳感器在周期內耗費在其上的時間成正比。優化模型可以表示為下式:
y= min(ζn)

2.2.2 控制策略
通過調整傳感器與目標之間的信息交互時間來完成最優化目標信息獲取水平。下面就是算法步驟:
輸入:L,S,G,A,K。
步驟:1)確定pij,qin;2)根據任務K,確定各個目標的跟蹤精度要求ρ0;3)優化得到當前物理條件下的傳感器,目標區域的空時劃分。
輸出:分配結果τij,τik。
算法的主要部分在于第三步的優化部分,該優化問題可以看作線性優化問題:
可以將該線性優化問題轉化為標準的線性規劃問題。
2.3 信息動態控制
根據當前的物理狀態,優化獲得了傳感器與目標的空時分配,得到了各個傳感器在一個物理狀態周期內的時間任務分配結果,下面就是要根據該結果來完成各個傳感器的資源管理。圖3就是總體的傳感器管理流程圖。
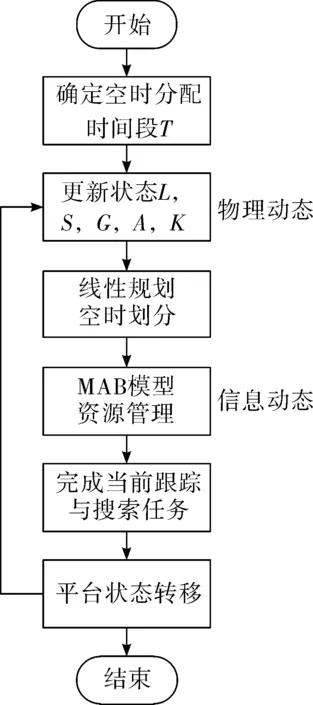
圖3 傳感器管理流程
關于傳感器資源管理部分,文獻[8-9]都進行了一些研究。文中主要利用MAB模型[10-11]對波束控制進行描述,進而采用UCB指數方法[12]完成模型的應用。在完成雷達目標搜索時,首先將待探測空域劃分為m個波束位置,進行一輪均勻搜索,據此得到初始的波位UCB指數,然后根據UCB指數進行波束的控制,根據UCB指數的策略,波束會傾向于回波幅度較高的位置,最終穩定在回波幅度最高的波位[13-14],根據脈沖積累原理[15],雷達會在目標存在的地方獲得更強的回波信號,從而積累得以發現目標。
3 模型仿真
3.1 空時劃分仿真
設置傳感器與目標之間的單位時間探測信息交互量(表2),即pij。并且目標1~3的任務設置為穩定跟蹤目標,目標4為待攻擊目標。
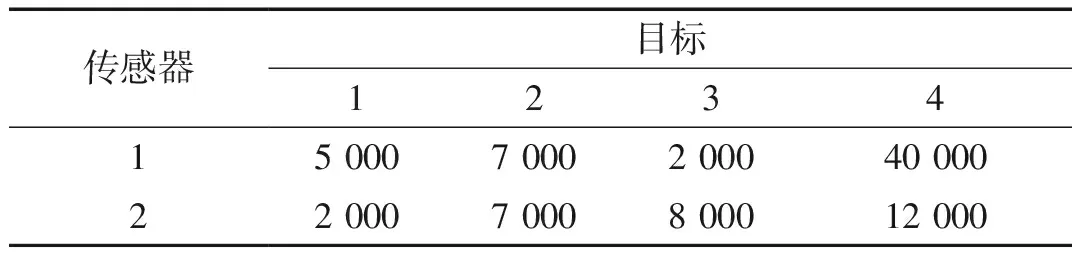
表2 傳感器目標信息交互 s/km2
根據任務得到單位時間目標的任務需求見表3。

表3 目標任務設置 1/km2
根據線性規劃得到傳感器目標在單位時間內的劃分結果見表4。
在空時劃分層,各個傳感器得以在其最佳區域發揮優勢,在二者性能所差無幾的目標則共同完成其探測。
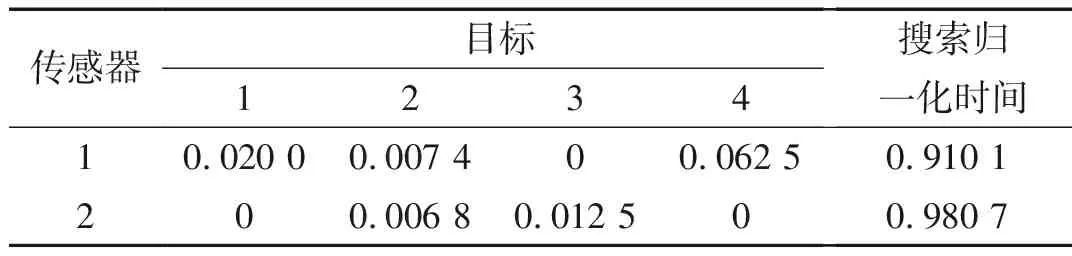
表4 優化結果
3.2 資源管理仿真
設置目標回波水平在雜波為高斯分布條件下,圖4是目標回波歸一化幅度為1~2時,雷達發現目標時刻目標出現波位與其他波位更新次數的比值(除去首次均勻搜索的一次)。
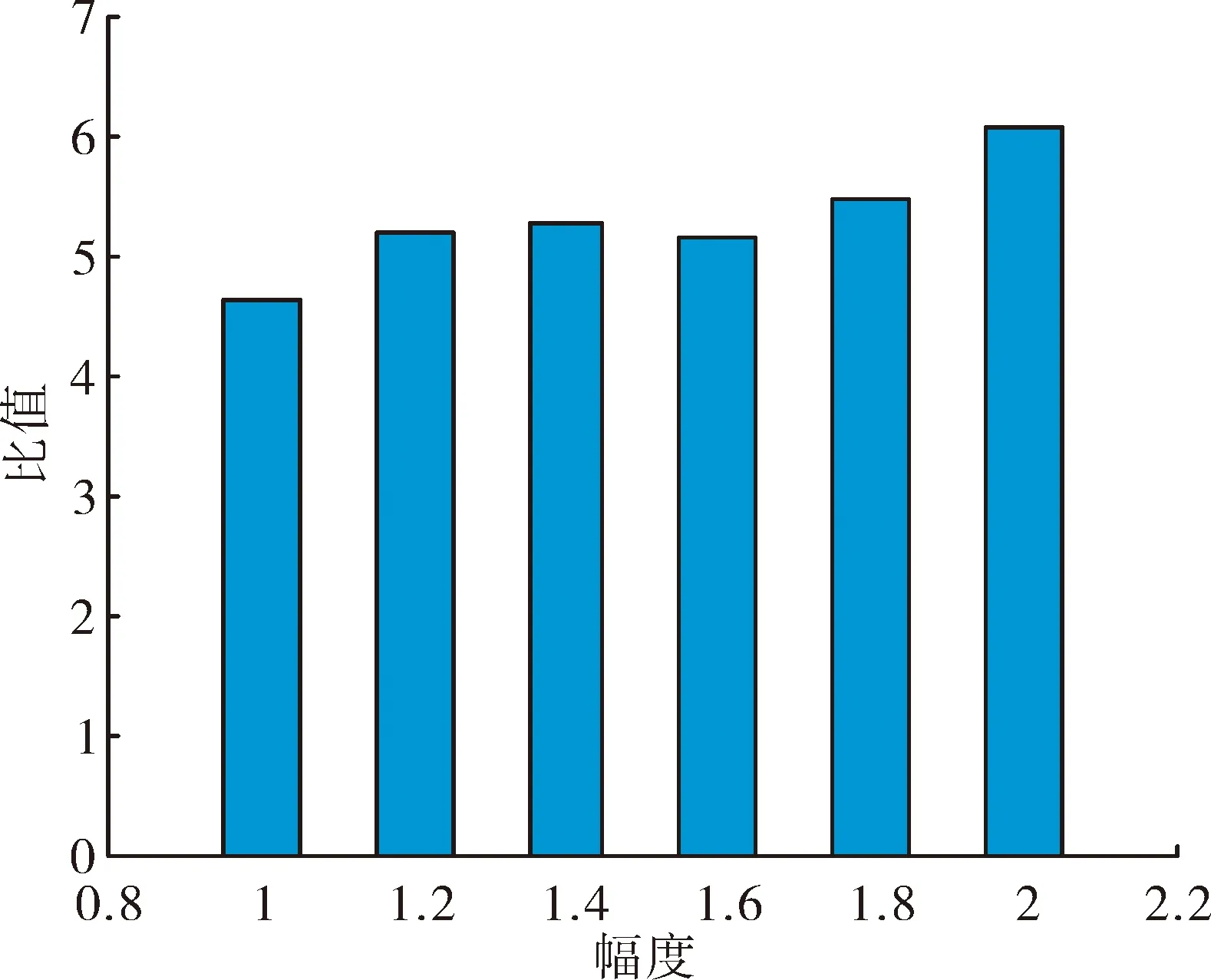
圖4 波束更新時間比
由此可見在未發現目標之前,雷達將波束控制在目標存在區域的時間大約是其他波位的5倍,這與波束搜索策略的目的要求是一致的。接下來按照表5設置雷達工作環境與參數。
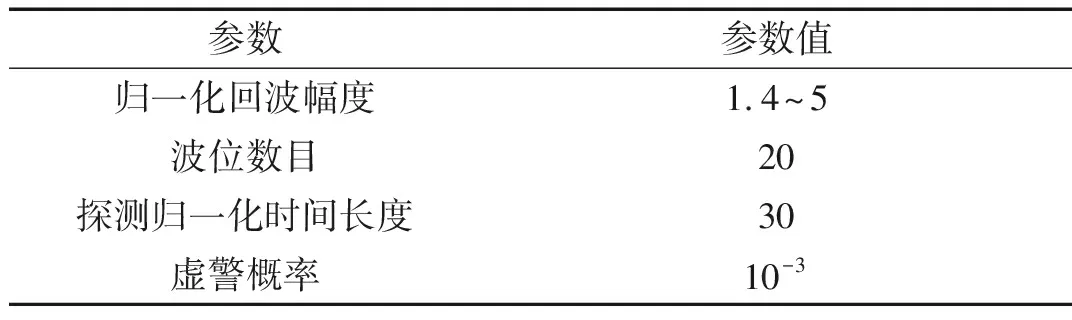
表5 參數設置
下面在雷達的目標發現概率和目標發現效率兩個方面,將該方法與其他方法進行對比,主要是貪婪算法[16]和UCB-V指數[17]方法。文中的貪婪算法的具體設置是,僅僅更新探測當前目標回波幅度最高的若干個搜索單元,而不采用UCB指數。N=1代表每次更新僅僅檢測回波幅度最高的一個波位單元,N=2表示每次更新檢測回波幅度最高的前兩個檢測單元,該方法屬于無隨機探索的貪婪算法。結合文獻[17]提出的帶方差信息的UCB-V方法進行對比。
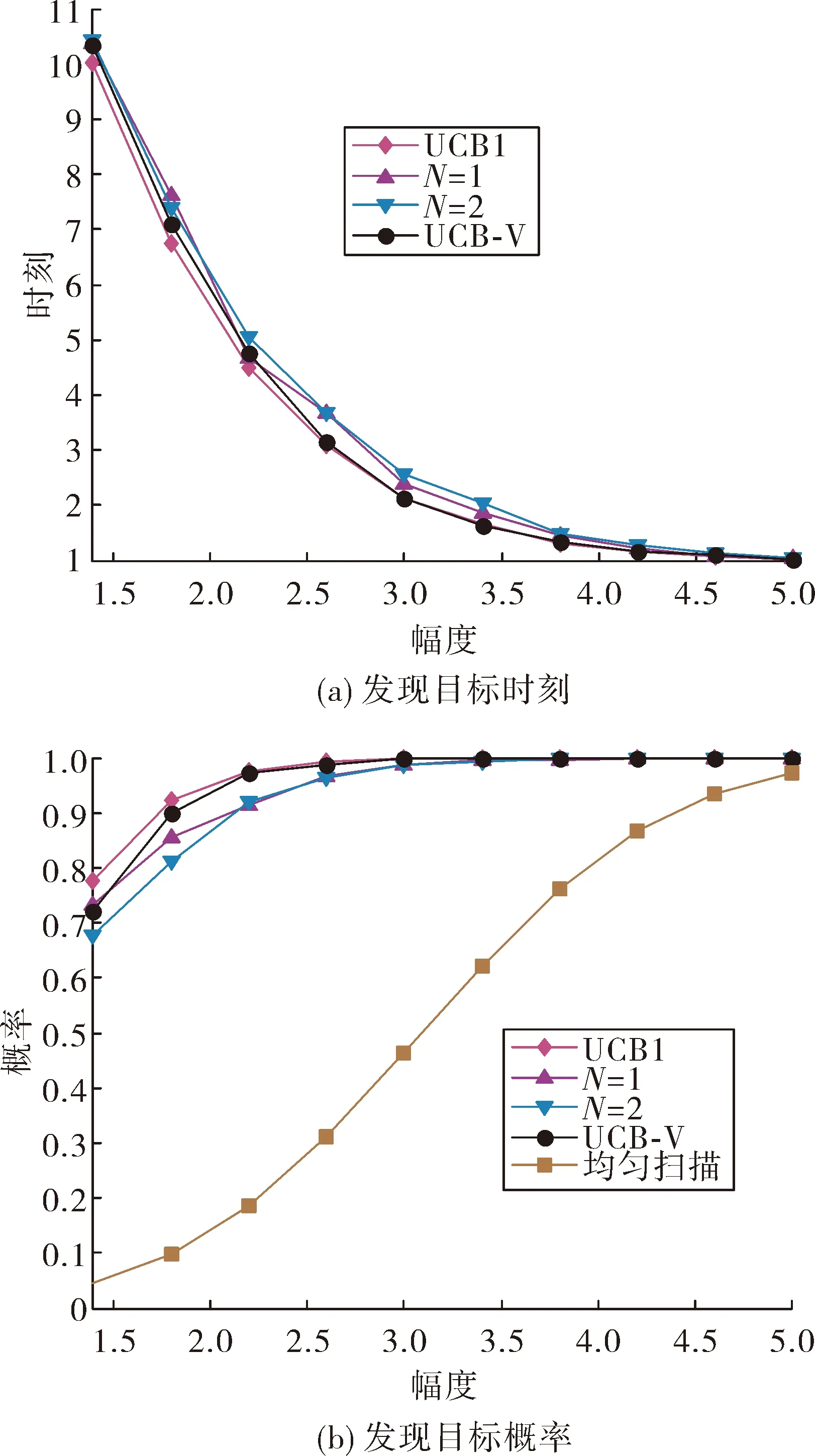
圖5 目標搜索情況
在基于信息動態的資源管理中,各個傳感器不斷根據當前回波信息調整搜索策略,將更多資源配置于目標存在概率大的區域,使得雷達目標發現概率明顯提升,獲得同樣的目標發現概率,文中提供方法較原先的均勻掃描方法對目標回波幅度的要求更低,降低幅度至少為噪聲標準差的3倍。在功率上,該值對應的信噪比水平約為10 dB。
4 結論
文中針對多機協同傳感器系統的工作方式進行研究,結合物理動態與信息動態將多機協同傳感器管理劃分為兩個層次:空時劃分層與資源管理層。從而將系統管理問題轉化為兩級數學優化問題,有效降低了系統的復雜度。仿真結果表明傳感器可以協同有效完成任務,并通過資源管理提升傳感器應用水平,在搜索狀態下,發現目標功率信噪比較原先降低10 dB以上。
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華手工(2017年2期)2017-06-06 23:00:31
雜文月刊(2016年1期)2016-02-11 10:35:51
現代企業(2015年8期)2015-02-28 18:54:47
中外會展(2014年4期)2014-11-27 07:46:46
現代企業文化·綜合版(2011年6期)2011-06-24 05:30:44
