基于ILLE和SVM的衛星執行機構系統故障檢測與定位*
2019-08-21 04:38:32江文建程月華葉正宇
航天控制 2019年3期
江文建 姜 斌 廖 鶴 程月華 葉正宇
1. 南京航空航天大學自動化學院,南京210016 2.上海衛星工程研究所,上海200000
近年來,磁伺服機構作為高精度指向衛星的重要執行部件,其工作過程涉及電、熱和磁等多個環節,其運行可靠性直接影響到衛星平臺的穩定和安全。由于衛星運行環境復雜、溫度交變,故執行機構故障高發[1-2]。開展執行機構故障檢測與定位研究,可有效地監測執行機構的運行狀態,并檢測出系統發生的故障,定位出故障部件,有利于衛星平臺及時采取措施隔離故障,實施容錯控制,對提高衛星在軌可靠性和安全性具有重要意義[3-4]。
為實現衛星姿控系統執行機構的故障檢測,需提取故障特征數據并降維。傳統的線性降維算法,如PCA[5],保持了數據集的全局距離結構不變,但不能保持非線性數據結構的內在流形。基于流形的非線性降維算法,如等距映射[6](ISOMAP)、局部線性嵌入[7](LLE)及鄰域保持嵌入[8](NPE)等,通過保持數據的幾何結構,發現嵌入在高維數據中的低維特征,引起了廣泛的關注。但目前這些方法大多應用于離線數據的故障檢測,如LLE,在檢測前需提取大量的故障特征樣本進行訓練,而這在實際系統中是不可能實現的。因為流形學習應用于實際系統中時,樣本總是不斷更新的,系統運行初期很難獲得完備的信息[9]。為解決這一問題,文獻[9]提出了一種增量式局部線性嵌入(ILLE)方法應用于衛星姿控系統的故障檢測,通過將系統運行過程中的有用樣本加入原始訓練數據庫中,取得了很好的檢測效果。
故障定位是故障診斷的重點和難點。目前,用于衛星姿控系統執行機構故障定位的方法主要有基于模型的方法和基于人工智能的方法。由于衛星姿控系統的復雜性和非線性,構造精確的數學模型有很大困難。所以,一些專家學者們將目光轉向了基于人工智能的故障定位方法。如文獻[10]利用動態神經網絡模擬了反作用飛輪的運行特性,實現了對衛星姿控系統的故障檢測與定位。然而,神經網絡需要搜集大量的故障訓練樣本,這在低概率發生故障的衛星上是不易實現的。針對衛星故障樣本少的問題,文獻[11]利用SVM對提取到的少量故障特征樣本進行分類,實現了衛星姿控系統執行機構的故障檢測與定位。
本文在現有研究的基礎上,將ILLE和SVM兩種方法相結合,應用于衛星姿控系統執行機構的在線故障檢測與定位研究。
1 故障分析與診斷策略
1.1 故障模式分析
某高精度衛星仿真平臺姿態控制系統配置了3組磁伺服執行機構,分別沿衛星3個軸向安裝。每組磁伺服機構由驅動電路和2個對稱布置的磁浮機構組成,為衛星提供3軸控制力矩[12]。磁浮機構主要由定子和動子2部分組成,定子為磁鋼和磁軛,動子為線圈和骨架。根據磁伺服機構工作原理,由于磁浮機構的定子和動子老化或損壞的概率很小,不考慮其故障情形,僅考慮電流驅動電路故障情形。由于驅動電路中包含電阻、電容、二極管和運算放大器等模塊,而電子元器件容易受溫度、電磁環境等影響,元器件老化或損壞都有可能導致故障的發生。故本文重點研究驅動電路故障,主要考慮以下2種常見故障類型:
1)驅動電路斷路故障,其故障表現形式為
(1)
其中,Io(t)為磁浮機構的實際輸出電流;Ii(t)為磁浮機構的正常輸出電流,t為當前時刻;tf為故障注入時刻。
2)驅動電路運算放大器放大倍數突變故障,其故障表現形式為
(2)
其中,Δ(t)表示故障引起的實際輸出電流與正常輸出電流偏差值。
1.2 衛星執行機構故障檢測與定位策略
衛星執行機構故障檢測與定位策略如圖1所示。
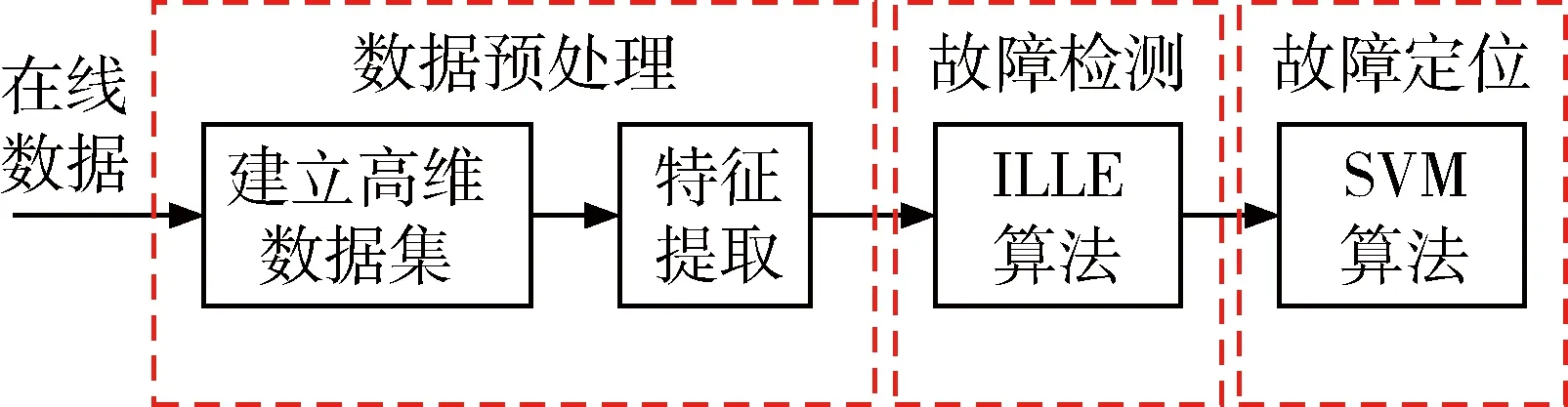
圖1 衛星執行機構故障檢測與定位策略圖
圖1從系統層面出發,采集衛星姿控系統在線數據建立高維數據集,特征提取后進行數據預處理。采用ILLE算法更新在線數據信息并實施故障檢測;針對故障情形下,采集執行機構故障特征數據,采用SVM方法進行故障定位,確定故障發生通道及類別。
2 基于ILLE的磁伺服機構故障檢測
2.1 ILLE算法
ILLE算法在LLE算法的基礎上,通過將新樣本點加入原始數據庫更新映射矩陣,更新相關參數,從而快速準確地實現對執行機構狀態的監測。
通過分析衛星姿控系統磁伺服機構功能,取衛星姿態數據以及控制力矩數據,建立高維狀態變量X=[x1,x2,…,xN]∈RD×N,為高維狀態變量的原始維數,N為樣本數。該變量降維后的特征空間Y=[y1,y2,…,yN]∈Rd×N,d為非線性流形的固有維數。基于ILLE算法降維及特征提取可歸結為以下4步:
1)尋找局部鄰域點
計算原始高維數據中各個樣本點之間的歐式距離,并根據距離進行升序排列,找到每個樣本點最近的k個鄰域點,k為預先設置的每個樣本點的鄰域點個數。
2)計算重構權值矩陣
計算重構每個樣本點xi的權值矩陣W,使得重構代價誤差最小。定義代價誤差為ε(W),其表達式為
(3)
其中,xi和xj是N個原始高維樣本點中任意2個樣本點;i=[1,2,…,N];j=[1,2,…,N];wij是xi與xj之間的權值,且要滿足以下條件
(4)
3)計算低維嵌入矩陣
保持權值矩陣不變,在低維空間重構原數據樣本點,并使得重構誤差最小化。定義重構誤差為δ(Y),其表達式為
(5)
其中,yi是降維后的低維嵌入樣本點;yj(j=[1,2,…,k])是yi的k個鄰域點之一。yi需要滿足的約束條件如下
(6)
其中,I表示d×d單位矩陣。
4)更新原始數據庫


若新樣本點更新入原始數據庫,則根據式(3)-(6)更新權值矩陣,計算出新的低維嵌入坐標Y′和新的映射矩陣A′。記更新后的高維狀態變量為X′,映射矩陣A′的計算如式(7)所示。
A′=Y′X′T(X′X′T)-1
(7)
2.2 故障檢測統計量
將ILLE算法應用于衛星執行機構故障檢測時,需要利用低維數據空間的特征空間和殘差空間構造T2和Q統計量。T2統計量反映的是數據在主元子空間中偏離主元模型的程度,而Q統計量反映的是數據在殘差子空間中偏離主元模型的程度[13]。T2和Q統計量的定義公式為
(8)
(9)
其中,ynew為測試樣本xnew在LLE空間的投影,可通過ynew=Axnew計算得到。S是正常狀態下嵌入矩陣Y的協方差矩陣,即S=YTY/(N-1)。和Q統計量的控制限為
(10)
(11)

ILLE應用于衛星執行機構故障檢測時,需要根據新樣本的引入情況實時更新T2和Q統計量的控制限。T2和Q統計量控制限的計算公式可參照式(10)和(11)。
2.3 故障檢測步驟
基于ILLE的衛星執行機構故障檢測分為程序啟動和在線檢測2個模塊,如圖2所示。
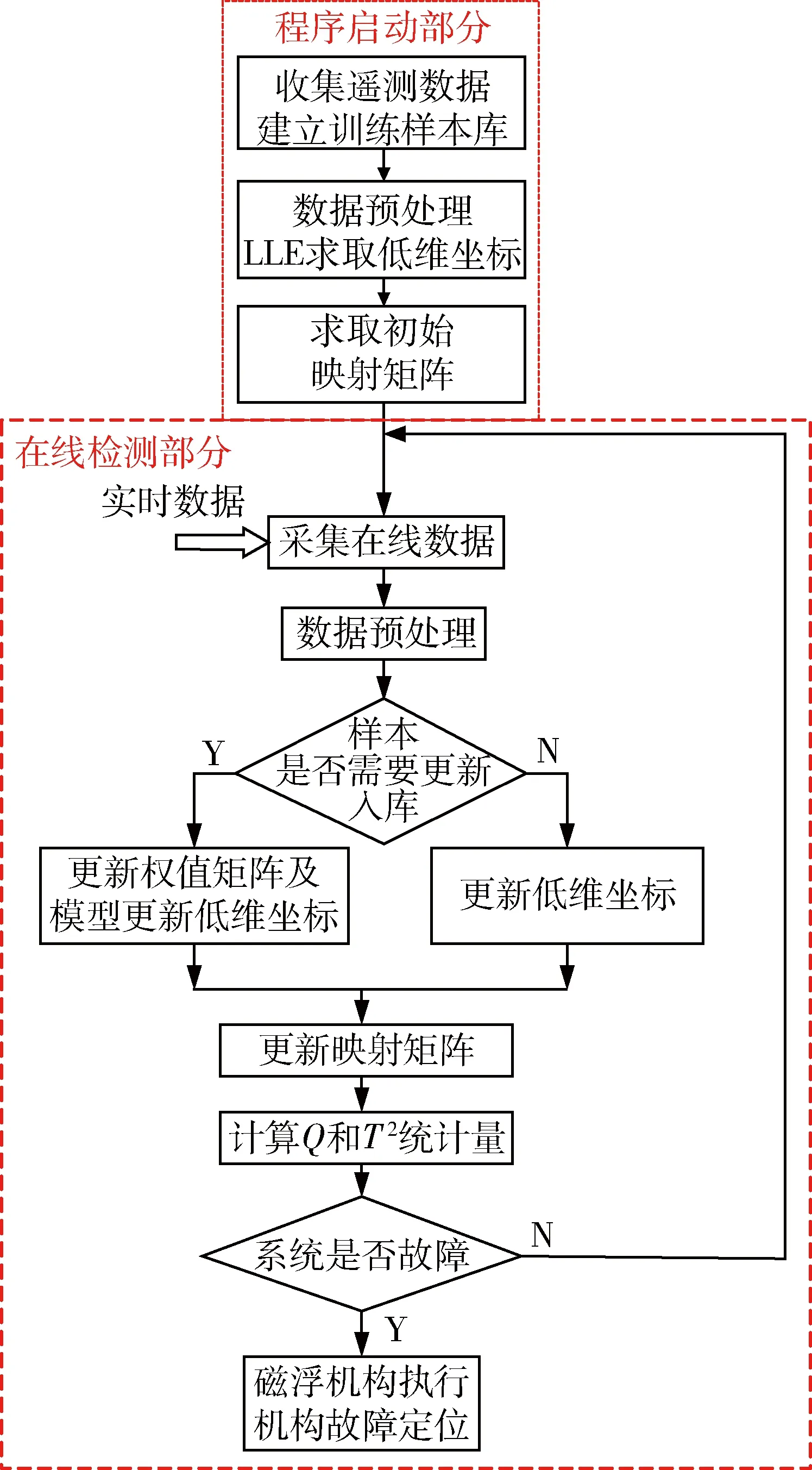
圖2 基于ILLE的衛星執行機構故障檢測流程圖
程序啟動模塊實施訓練樣本集的處理。通過收集系統運行初期數據建立訓練樣本庫,再對數據進行預處理后利用LLE降維,得到初始權值矩陣、低維嵌入矩陣和初始映射矩陣。在線檢測模塊采集實時在線數據,預處理后,更新數據庫及映射矩陣、Q統計量和T2的控制限,最后計算故障檢測統計量Q和T2,并與其控制限進行比較。若有統計量超過了其控制限,則判定系統發生故障。
3 基于SVM的磁伺服機構故障定位
3.1 SVM原理
SVM是一種典型的二元分類器,能夠將數據分成2類。它基于結構風險最小化原則,具有良好的泛化能力、魯棒性,能夠處理帶有大量特征的高維數據集。針對衛星執行機構故障樣本少的問題,SVM相較于神經網絡,能夠很好地處理小樣本問題,并且可保證算法的全局最優性 ,避免了神經網絡無法解決的局部最小問題。
取衛星執行機構訓練數據集{xi,yi}(i=1,2,…,n),x∈Rn,y∈{-1,1},xi是輸入向量,yi是所需的分類,n是訓練樣本數。采用SVM方法,確定一個函數f(x,y)可以將給定的數據{xi,yi}進行分類。最優超平面定義如下:
wTx+b=0
(12)
其中,w∈Rn是權重向量,為一個標量偏差項,w和b用來描述超平面的位置。向量xi和同類的yi必須滿足下列不等式:
yi(wxi+b)≥0,yi∈{-1,1}
(13)
對于衛星執行機構,不同磁浮機構的輸入輸出數據一般不是線性可分的。為了減少計算量,SVM通過選擇一個先驗的非線性映射,在高維特征空間里構造出最優分離超平面。對于每一個訓練樣本,一個正的松弛變量εi被定義,用來獲得較大距離的超平面,同時也允許了一些樣本被錯誤的分類。因此,搜索最優超平面可以轉化為解決下面的約束二次優化問題,即:
(14)
其中,yi(wxi+b)≥1-εi,i=1,…,n。C是正規化參數,用來決定最大化超平面和最小分類誤差之間的平衡。如果0≤εi≤1,意味著xi在超平面的右邊,即這個模式的分類是正確的。如果εi>1,則意味著xi處于超平面錯誤的一邊。
3.2 多類分類問題
衛星姿控系統執行機構由多個磁浮機構組成,每個執行機構都有可能發生故障,因此涉及多分類問題。選取每個磁浮機構的輸出電流和指令輸入電壓的比值作為輸入,以此檢測執行機構中各個磁浮機構是否發生故障,從而實現執行機構的故障定位。
使用SVM解決多類分類問題方法有:一對多法(One Against All)、一對一法(One Against One)以及基于二叉樹的多類支持向量機分類方法[14]。由于一對一法測試精度高且實現過程相對簡單,本文采用一對一法求解磁伺服機構故障定位問題。具體步驟如下:
1)構建分類器數量。分別選取2個不同類別構成一個子分類器,這樣對于k個類別共有k(k-1)/2個SVM子分類器;
2)構造類別i和類別j的SVM子分類器。在樣本數據集中選取屬于類別i、類別j的樣本數據作為訓練數據,并將屬于類別i的數據標記為正,將屬于類別j的數據標記為負;
3)故障定位。將測試數據對個SVM子分類器分別進行測試,并累計各類別的投票,選擇得分最高者所對應的類別為測試數據的類別。
3.3 故障定位步驟
基于SVM的衛星姿控系統執行機構故障定位方法具體步驟可分為學習階段和識別階段。
1)學習階段。首先收集歷史故障特征樣本,建立訓練樣本集,并根據樣本特征選擇合適的核函數(一般選用RBF核函數),并利用網格搜索法和交叉驗證法確定核函數的相關參數;其次,根據核函數的要求,將訓練樣本正規化;最后,利用一對一法,在不同類別的樣本間兩兩建立一個SVM子分類器,從而形成多個SVM子分類器;
2)識別階段。首先采集執行機構發生故障后的故障特征樣本,建立測試樣本集;其次,將測試樣本進行預處理,預處理過程包括濾波及歸一化;最后,將測試樣本分別裝入各個SVM子分類器中進行預測,并累計各個子分類器的投票結果,再根據投票結果確定故障發生通道及類別。
基于SVM的衛星姿控系統執行機構故障定位具體流程圖如圖3所示。
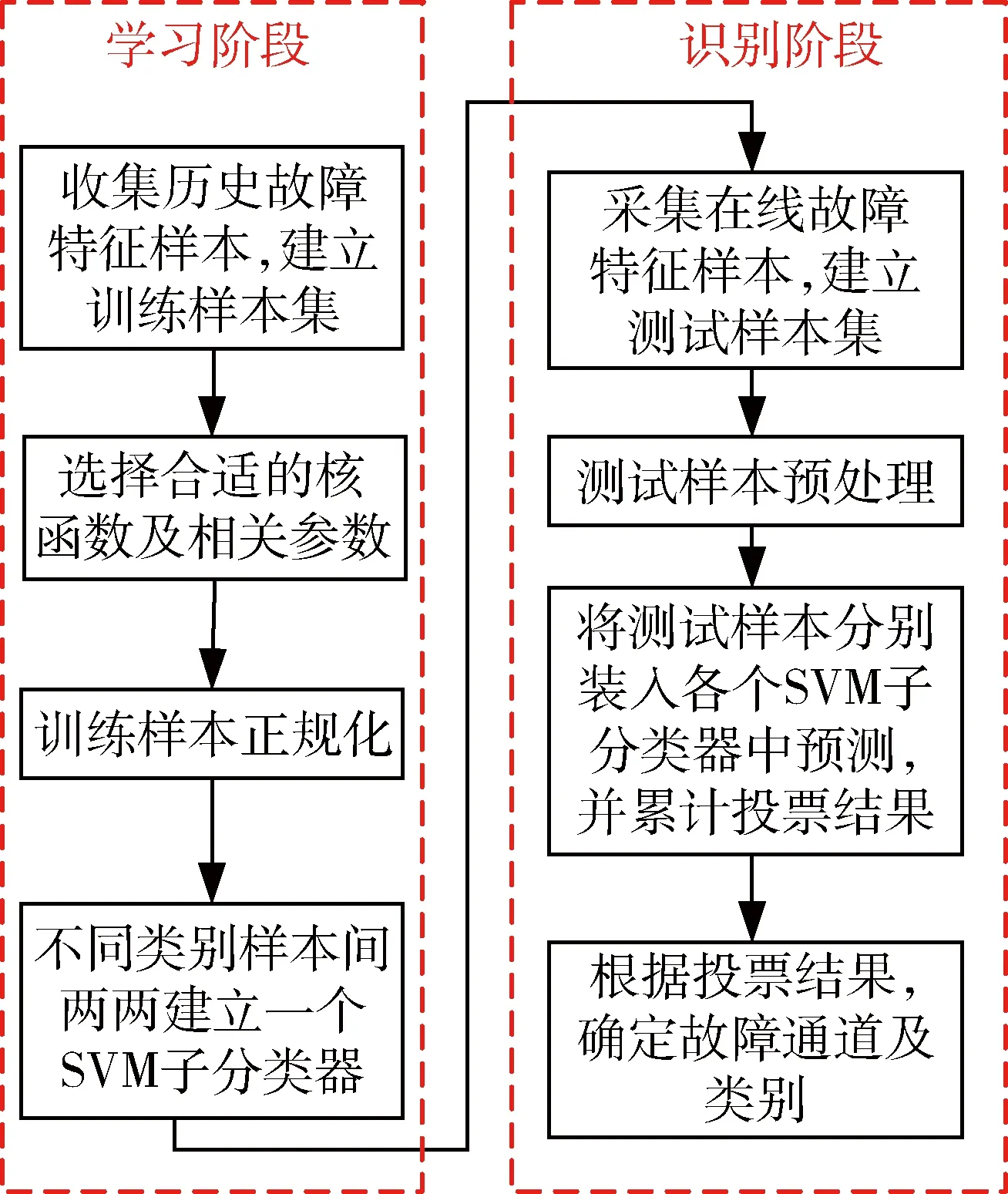
圖3 基于SVM的衛星執行機構故障定位流程圖
4 仿真試驗及結果分析
本文以衛星機動模式為例開展算法的仿真驗證。選取初始姿態角為[0°,0°,0°],目標姿態角為[20°,25°,30°],仿真總時長為270s,每隔0.2s采集一次樣本。選取0~100.0s的樣本點建立訓練樣本集,100.2~270.0s的樣本點建立測試樣本集。由于衛星姿控系統發生故障時,對衛星三軸姿態角、姿態角速度和控制力矩的影響較大,故選取這些數據構建原始高維數據集。收集不同故障類型下各磁浮機構的歷史輸入電壓和輸出電流,運用一對一法建立多個SVM子分類器。
Case1:執行機構斷路故障的檢測與定位
針對磁浮機構4注入驅動電路斷路故障,故障時間為140.0~270.0s。T2和Q統計量的檢測結果如圖4所示。
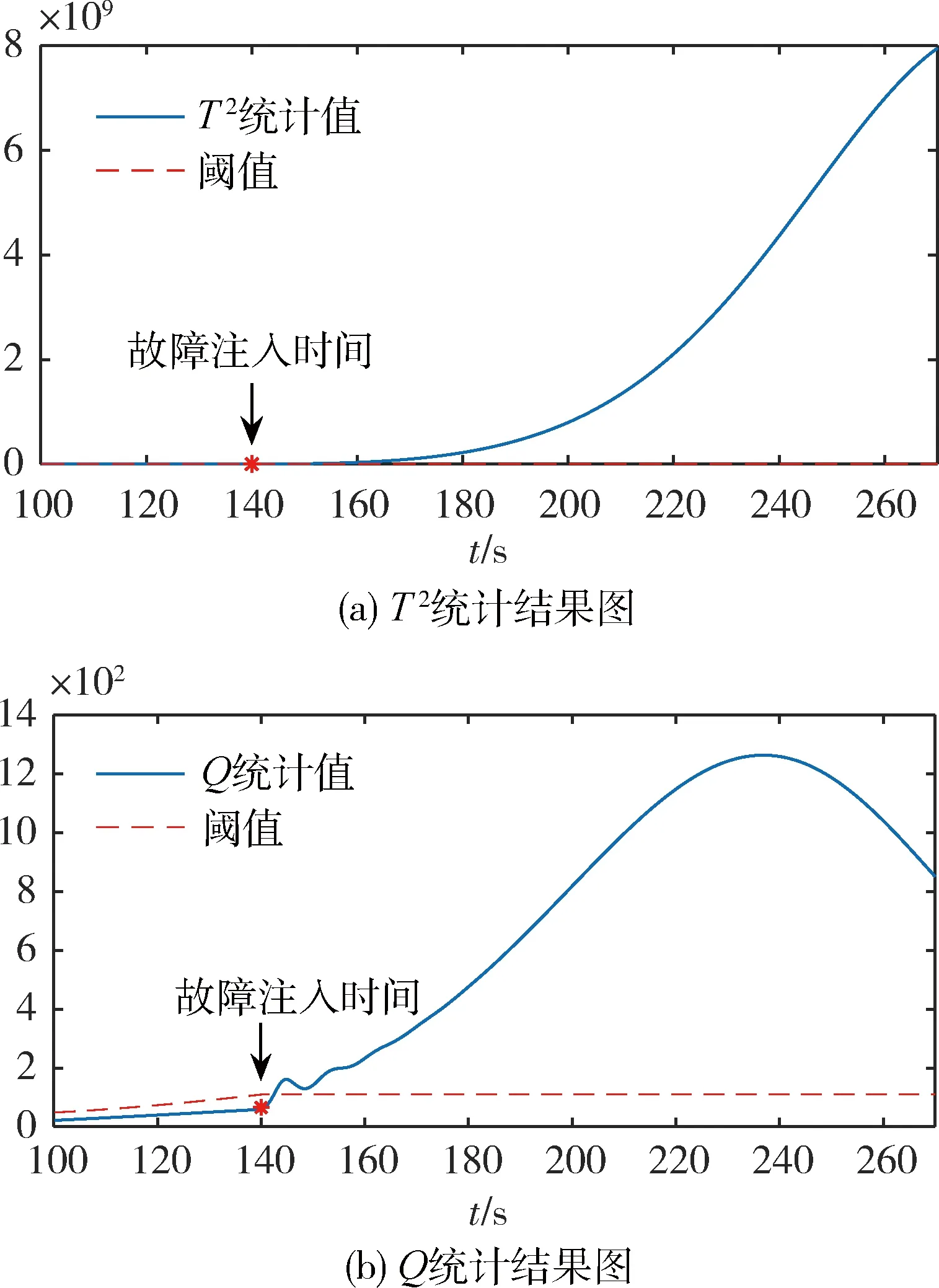
圖4 執行機構斷路故障下故障檢測結果圖
圖4中的2條虛線分別表示T2和Q統計量的控制限,實線為T2和Q統計量的值,當其中有一個值超過其控制限時,則系統發生故障。由圖可知,當磁浮機構4在140.0~270.0s注入驅動電路斷路故障時,基于ILLE的故障檢測方法能夠及時地檢測出故障。其中Q統計量的檢測結果存在部分漏判,這是因為故障發生后短時間內主元子空間的偏移并沒有打破原有模型的變量間的相關性,導致Q統計量的檢測存在一定時延。
在140.0s檢測到衛星姿控系統發生故障后,選取執行機構138.0~147.8s的指令電流與遙測電壓,輸入到各個已經訓練好的SVM子分類器中進行故障定位。SVM故障定位結果圖如圖5所示。
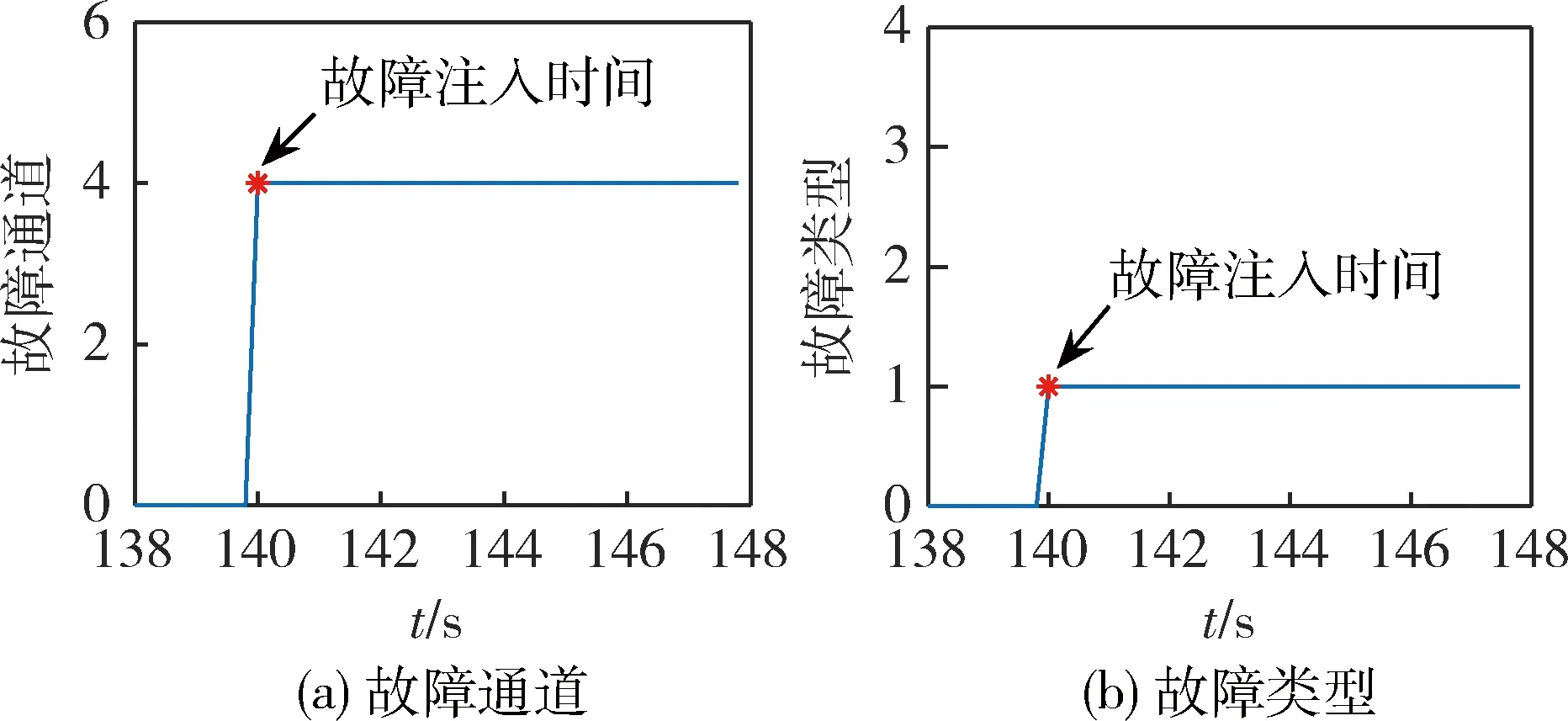
圖5 執行機構斷路故障下故障定位結果圖
圖5(a)表示當前時刻的故障發生通道(0表示沒有磁浮機構發生故障,1-6表示發生故障的磁浮機構編號);圖5(b)表示當前時刻的故障類型(0表示正常,1表示驅動電路斷路故障,2表示驅動電路放大器故障)。由圖可知,基于SVM的故障定位結果為磁浮機構4發生驅動電路斷路故障,與預期結果一致。
Case2:執行機構放大器故障的檢測與定位

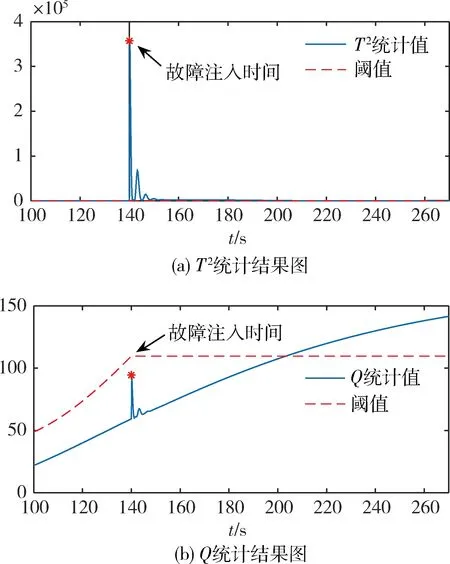
圖6 執行機構放大器故障下故障檢測結果圖
由圖6可知,磁浮機構5在140.0~270.0s發生驅動電路放大器故障時,基于ILLE的故障檢測方法能夠及時地檢測出故障。其中Q統計量的檢測結果有著較長時間的故障漏判,這是因為磁浮機構發生放大器放大倍數突變故障時,只會在短時間內對某一個或幾個特征量的值產生較小影響,而這種影響對主元子空間的影響較大,對殘差子空間的影響較小,因此導致了Q統計量檢測結果較長時間的漏判。但是,從整體上該方法依然可以及時檢測出故障的發生。
在140.0s檢測到衛星姿控系統發生故障后,選取執行機構138.0~147.8s的指令電流與遙測電壓,輸入到各個已經訓練好的SVM子分類器中進行故障定位。SVM故障定位結果圖如圖7所示。
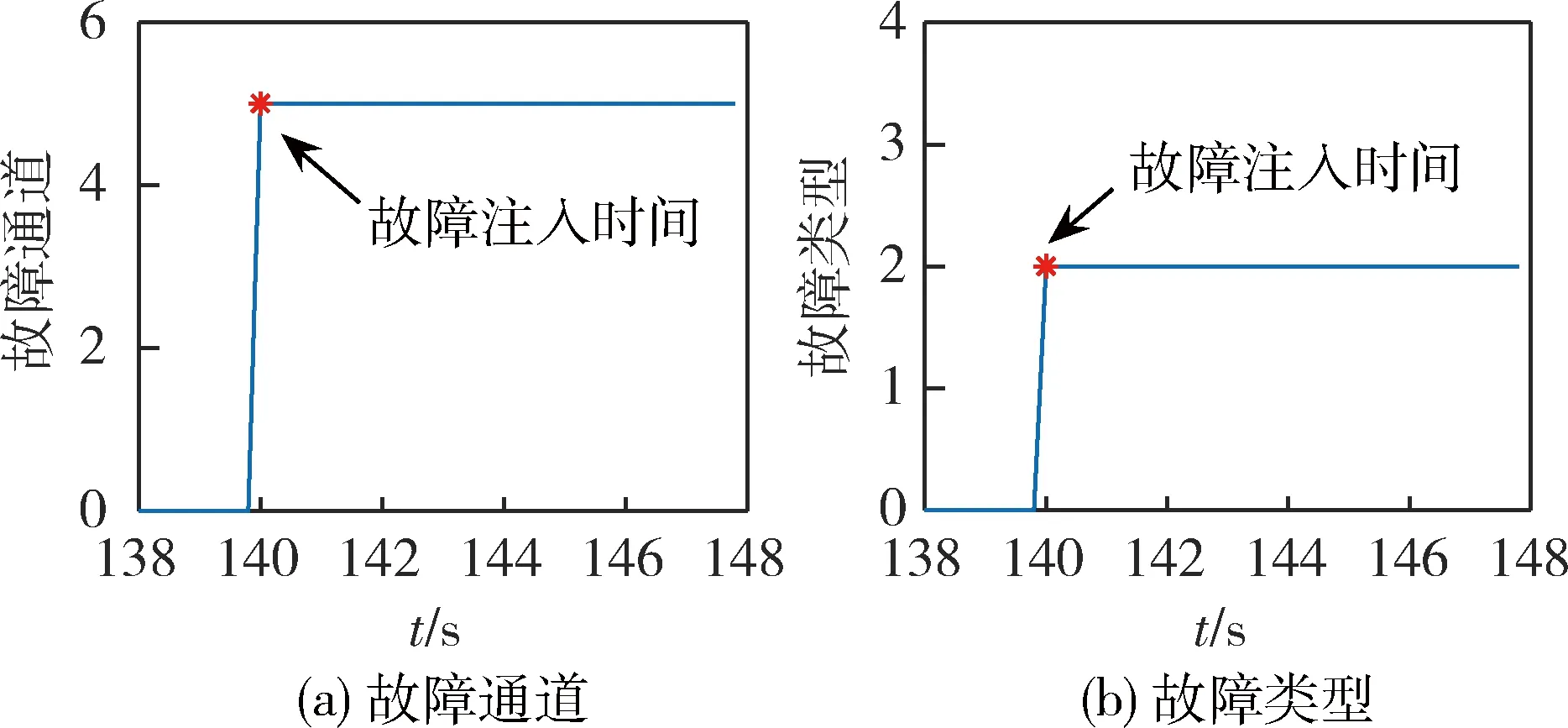
圖7 執行機構放大器故障下故障定位結果圖
圖7(a)表示當前時刻的故障發生通道(0表示沒有磁浮機構發生故障,1-6表示發生故障的磁浮機構編號);圖7(b)表示當前時刻的故障類型(0表示正常,1表示驅動電路斷路故障,2表示驅動電路放大器故障)。由圖7可知,基于SVM的故障定位結果為磁浮機構5發生驅動電路放大器故障,與預期結果一致。
5 結論
為實現衛星姿控系統執行機構的故障檢測與定位,研究了一種基于ILLE和SVM的故障檢測與定位方法。基于ILLE方法可通過在線更新數據信息,實現衛星執行機構實時故障檢測。基于SVM方法可實現在歷史故障樣本少的情況下,準確辨識故障通道及類別,實現磁伺服機構的故障定位。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
