通過雷達桅修改降低船舶空高的實例研究
2019-08-20 08:47:56曹湘偉
江蘇船舶 2019年3期
李 強,曹湘偉
(江蘇新時代造船有限公司,江蘇 靖江 214500)
0 引言
雷達桅是各類海上航行船舶必備的舾裝件之一。雷達桅上安裝的雷達、天線、失控燈等各類信號燈,以及風速風向儀、汽笛等設備,起到海船正常航行和應急避碰的輔助作用。一般情況下,雷達桅設計是在船舶初步設計過程中依據船舶的主尺度以及航行路線的條件進行的,并在詳細設計過程中具體細化并送審認可。隨著船運市場的變化,船東可能會調整和變更船舶的運營航線,使得船舶的空高限制性發生變化。這種變更要求一旦出現在船舶建造后期,特別是在上層建筑已經完工的情況下,相關的修改設計會因為受到各種條件限制而非常困難。本文以111 000 t成品油船的后期空高變更為例,研究通過修改雷達桅來實現空高限制調整的方法和設計過程。
1 船舶變更空高的設計條件
111 000 t成品油船入級美國船級社(ABS),船長251.84 m,船寬44 m,原設計空高限制距基線57 m。上層建筑位于船艉區域,羅經甲板距基線41.3 m,雷達桅含天線高度為15.3 m,艉部機艙棚煙囪高度距基線46.8 m。該船海試完成后,由于市場原因,船東需要變更該船運營航線,改道密西西比河航線。該航線吃水限制為41.46 m,經計算吃水后,船舶空高需要限制到距基線49.78 m。
2 船舶變更空高的初步設計
2.1 變更空高修改的限制條件
如果空高變更幅度接近或超出了雷達桅高度,就需要對整個上層建筑高度進行修改,這種修改應當是船舶初步設計的范圍,在船舶建造后期修改很難實現并且工期長、成本高,不屬于本文討論對象。依據上述船舶變更空高的設計條件,本船整個空高只需要降低7.22 m,在上層建筑及其內裝已經完工的情況下,所有的修改可以考慮在雷達桅上進行。
如果雷達桅還保留原有形式,則雷達桅總高需要從15.30 m降低到8.48 m,凈降低6.82 m。另外,羅經甲板和雷達桅的設備比較多,因此修改時還要綜合考慮磁羅經的4 m安全距離要求、信號燈360°環照范圍、信號燈間距離、信號燈盲區、雷達盲區等因素。
2.2 雷達桅初步選型過程
原有雷達桅見圖1。雷達桅主桅體呈錐形,雷達平臺高度位于距羅經甲板8.3 m處。如果不改變雷達平臺上燈桅的高度,則該平臺需要下降的幅度為6.82 m,平臺高度將位于距羅經甲板1.5 m處。如直接將雷達桅主桅體截斷掉6.82 m,會出現3個問題:一是主桅體上布置了6組12只蘇伊士運河信號燈,平臺下降后將與信號燈位置重疊,信號燈需要移出;二是雷達平臺將與磁羅經的安全距離范圍重疊;三是雷達桅總體重心雖然降低,但主桅體變細,雷達平臺及燈桅振動可能變大。因此,設計時選擇放棄基于原雷達桅進行簡單修改的思路,準備重新設計雷達桅。
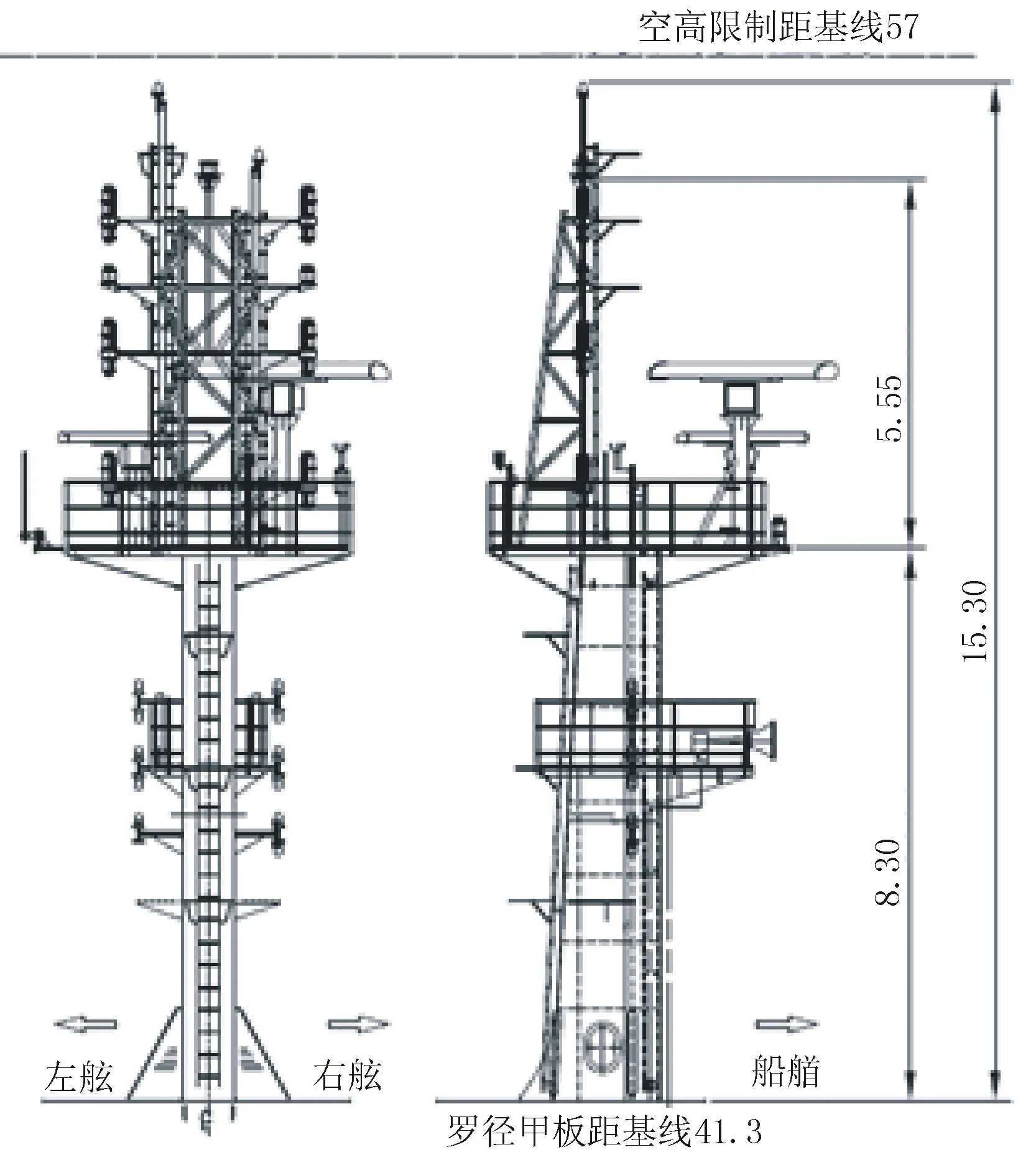
圖1 原有雷達桅簡圖(單位:m)
方案1:設計的首選方案是考慮雷達桅上的所有設備都限制在空高內,即雷達和燈桅頂部的衛通C站天線、莫氏燈最高點都設在49.78 m的位置。依據IMO SN.1/Circ.271的規定,雷達的后135°區域內總扇形盲區大小不得大于20°,并且雷達S/X波束照射的垂直方向25°的范圍內不得安裝舾裝件,以避免造成假回波。雷達艉部盲區示意總圖見圖2。從圖2看出,在49.78 m位置處,由于機艙棚的存在,單個雷達的盲區已經超過了26°,如果按這個條件進行設計,則需要減少機艙棚對雷達盲區的影響。在雷達桅受到磁羅經的安全距離的限制無法前移的情況下,只能修改機艙棚寬度以避開雷達照射,或者降低機艙棚高度,避開S波段雷達垂直方向25°和X波段雷達垂直方向20°的波束照射角度。修改內容包括機艙棚結構和內部布置,成本高昂,所以這樣的設計是不經濟、不合理的。
方案2:采用逆向思維倒推設計條件,即從機艙棚的頂點開始,以滿足雷達照射角度的要求為條件,反向推斷雷達所在位置和高度。經計算,雷達位于51.17 m處,即距羅經甲板9.87 m的高度,并往艉部方向平移1個肋位時,其照射范圍高于煙囪結構,可以避免雷達產生艉部盲區。另外,經過核查,雷達在該高度能夠滿足IMO SN.1/Circ.271中關于艏部盲區不超過500 m或兩倍船長的規定。這個方案下,雷達已經位于空高限制的上方,但雷達高度距離空高限制僅1.39 m,因此,考慮設計可倒式燈桅(以下簡稱“可倒桅”)與升降式雷達座(以下簡稱“升降雷達”)來降低天線、信號燈與雷達的高度以彌補高度差。考慮到雷達本身旋轉時產生晃動,雷達座不宜過高,設定可倒桅和升降雷達所在雷達平臺高度于距羅經甲板6.38 m處,距離空高限制2.1 m。至此,雷達桅修改設計完成框架和定位工作。
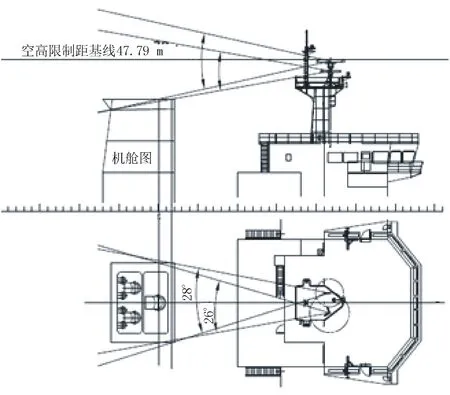
圖2 雷達艉部盲區示意圖
3 雷達桅的修改設計過程
3.1 雷達桅設備布置調整
設定雷達平臺定位后,需要對雷達平臺上的設備進行調整布置。
原雷達平臺上的信號燈桅為桁架結構,由4根立柱加眾多橫梁構成。而可倒式桅桿一般為單柱體,并且為了能夠保證桅桿正常起降,桅桿重量應當越輕越好。因此,設計時將原信號燈桅上的失控燈、深吃水燈、新加坡海峽燈等移出雷達桅,大船燈和油輪警示燈移到雷達平臺上。
由于修改后新雷達桅主桅體長度為6.38 m,原雷達桅主桅體上的眾多信號燈在現有長度范圍內已無法布置,因此將原雷達桅主桅體上的蘇伊士運河信號燈移出。
將原下方平臺的汽笛移到主平臺上,下方平臺改建成升降雷達檢修平臺。修改后雷達桅主要設備布置見圖3。
3.2 可倒式燈桅節點設計
在移出信號燈后,可倒桅上僅保留了莫氏燈、衛通C站天線和風速風向儀,因此可倒桅可適當降低高度。設計可倒桅主桅桿高度為4.4 m,含衛通C站天線及其基座總高為6.09 m,高出空高限制3.99 m。
可倒桅總重為478 kg。考慮到上半部分的重量達300 kg,呈明顯的頭重腳輕狀態,升起時比較費力,降落時則需要防備突然倒落,因此選用了液壓油缸作為可倒桅的動力裝置,設計最大拉力為32 kN。
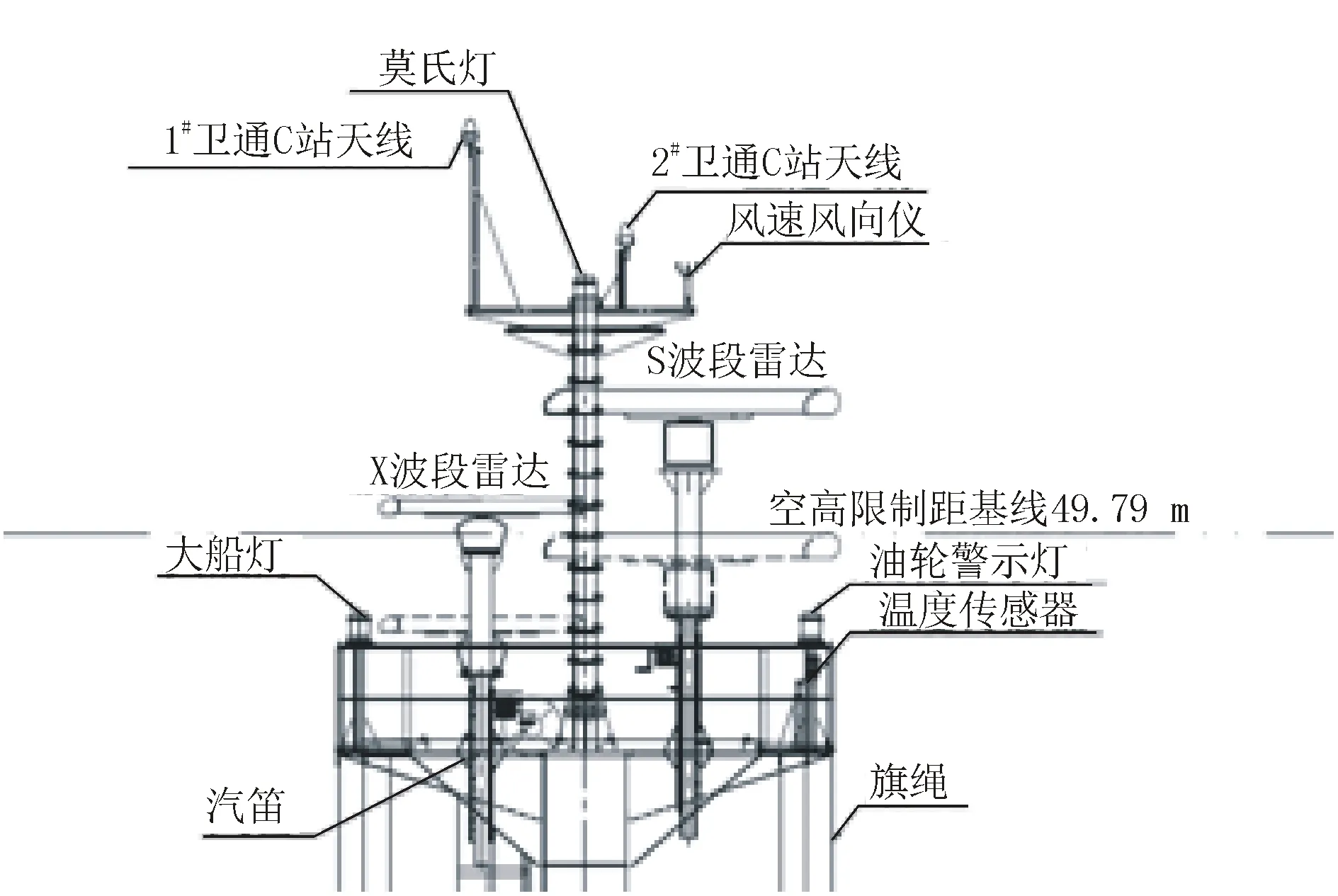
圖3 雷達桅及平臺設備布置示意圖
可倒桅總成見圖4。可倒桅為鉸鏈連接結構,包括3個部分:可倒桅體、可倒桅底座及液壓動力裝置。可倒桅底座及液壓動力裝置座焊接于雷達平臺上,平臺反面設計了結構加強筋。液壓動力裝置與可倒桅桅體上的油缸支腿通過Φ40 mm的軸銷進行連接。可倒桅桅體與可倒桅底座間采用異形法蘭連接,法蘭在靠艉部一側有Φ40 mm軸銷組成的鉸鏈。為避免可倒桅水平狀態下升起時的力矩過大,設計可倒桅與雷達平臺呈10°的傾斜,以利于升起操作。因此,設計時盡可能地將異形法蘭和鉸鏈位于可倒桅主桅的下端,法蘭中心距雷達甲板0.38 m。正常工作狀態下,該法蘭是由螺栓連接固定好的,保持可倒桅的直立狀態;通航限制狀態下,需要先將法蘭上的緊固螺栓拆除后,才能進行可倒桅的升降操作。
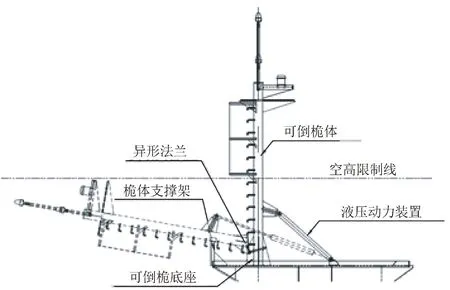
圖4 可倒式燈桅總成圖
3.3 升降式雷達座節點設計
升降雷達共有兩件:S波段雷達較高,高出空高限制1.39 m;X波段雷達僅高出空高限制0.34 m。由于船東希望過橋時雷達仍能正常運行,因此調整S波段雷達高度為49.780 m,X波段雷達高度為48.975 m。這樣既滿足了空高限制要求,同時也避開了雷達S/X波束間互相照射干擾。唯一的顧慮是,盡管X波段雷達降低后離周邊欄桿仍有120 mm的距離,但是考慮到X波段雷達自身的轉動引起的晃動可能會導致其碰撞側面欄桿,因而將X波段雷達半徑范圍內的欄桿設計成可拆式。該欄桿最上面的橫檔可拆。
S波段升降雷達的升降行程為1 165 mm,X波段升降雷達的升降行程為710 mm,均接近了其到雷達平臺的高度值,因此升降雷達需要穿過雷達平臺面,并將部分筒體設立在平臺的下方。
升降雷達總成見圖5。升降雷達由內管、外管及手動減速機3部分組成,內管、外管材料均為不銹鋼。內管的外壁附有直齒齒條,將齒條最上下兩端的齒封死可以作為限位裝置,外壁做好高度標記用于辨識高度。外管的內壁附有特氟龍墊塊,除潤滑之外,同時兼有矯正升降垂直度的作用。內管、外管之間,在外管頂部設立鎖緊錐套。操作時,雷達升降通過手動減速機操作,傳動內管的齒條進行升降,內管升、降到位后,在內管下方插入蝴蝶螺栓用于支承托住內管,再通過擰緊螺栓將鎖緊錐套下壓,鎖死內管,達到緊固的目的。
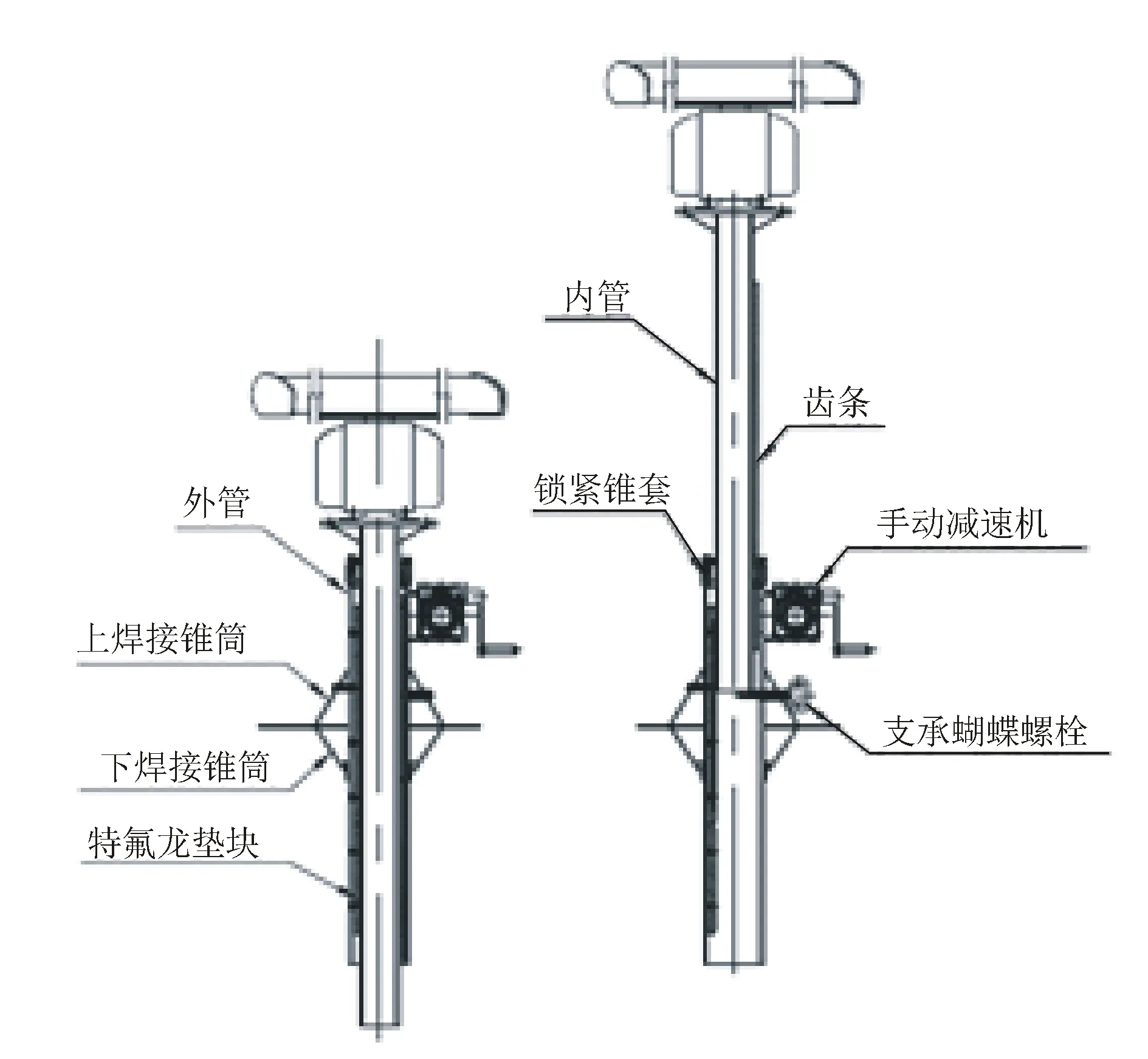
圖5 升降式雷達座總成圖
升降雷達是通過焊接安裝在平臺甲板上的。考慮到外管內部有特氟龍等附件,以及焊接容易引起外管變形,因此在外管上預先焊接一個錐筒作為平臺上焊接件,準備一個錐筒通過螺紋連接到外管上作為平臺下焊接件,通過焊接上下錐筒將升級雷達固定到平臺甲板上。
3.4 獨立信號燈桅節點設計與定位
由于原信號燈桅與原雷達桅主桅體上的各類信號燈均被移出新雷達桅,因此準備設計獨立信號燈桅(以下簡稱“燈桅”)安放移出的信號燈。
3.4.1 燈桅的節點設計
燈桅結構見圖6。燈桅采用單根立柱加斜撐的結構,具有結構穩定、重量輕優點。為避免干擾到可倒桅上的莫氏燈以及雷達平臺上的大船燈、油輪警示燈,燈桅不宜過高。根據實際條件設計燈桅主桅體高度為5.55 m,頂部失控燈安裝后總高為6.3 m。
燈桅伸出的信號燈燈座垂直方向間距1 m,符合信號燈安裝的要求。最下面的一盞信號燈距離羅經甲板1.07 m,超出周邊欄桿1.05 m的高度。
3.4.2 燈桅的定位
最初燈桅安裝于雷達桅兩側,與雷達平臺前端平齊。在干涉檢查中發現,該位置已經布置有F站天線,并且由于船名牌的遮擋,信號燈需要伸出羅經甲板欄桿外,才能保證單側信號燈180°環照無遮擋。因此,綜合考慮上述因素和羅經甲板反面的結構加強位置,將信號燈桅前移3個肋位,放置于羅經甲板中前部的舷側,與駕駛室移門的圍壁結構對齊。安裝時,需要微調船名牌及其照明燈的位置和高度,避免干擾信號燈。
4 雷達桅附件的功能試驗及修正
雷達桅和信號燈桅制作安裝完成后,對其舾裝附件進行功能試驗。
4.1 可倒桅的起降操作試驗
在試驗過程中,發現可倒桅在向艉部方向降下時,總會偏向左舷。經分析,燈桅頂部的1號與2號衛通C站天線座的高度不一致,肘板大小不一致,是導致可倒桅重心偏向左舷的原因,并且由于可倒桅主桅體隨之倒向左舷,主桅體的重量加重了偏向的程度。經計算,1號與2號衛通C站天線座的重量差僅為27 kg,因此解決問題的關鍵是在可倒桅降落的初期保證不偏向。考慮到艙蓋、鋼質門等同為鉸鏈連接的舾裝件,對可倒桅的鉸鏈進行改進。在原有鉸鏈的兩側,另增加兩個同軸的隨動鉸鏈,對可倒桅的運動方向進行限制,鉸鏈通過斜撐連接到主桅體上。修改完成后,試驗效果良好,可倒桅成功倒入桅體支撐架。
4.2 升降雷達的升降操作試驗
雷達降下后,發現較高的S波段雷達的隨行電纜處于自由狀態,有纏繞雷達的隱患。因此在S波段雷達附近甲板上焊接1根直立圓管用于綁扎電纜,限制其自由狀態。另外,還準備了升降雷達操作警示牌,提醒操作人員避免雷達操作順序錯誤造成S/X波段雷達間的碰撞。
4.3 雷達桅總高度的測量
在實船試驗的同時,對雷達桅進行測量。在可倒桅倒下,以及升降雷達降下的狀態下,經測量,雷達桅總高度滿足變更后的船舶空高限制要求,船舶空高變更得以實現。
5 結論
通過對111 000 t成品油船雷達桅的修改,經實船測試驗證,解決了船舶后期空高限制變更的問題,得出如下結論:
(1) 在船舶建造后期,修改雷達桅是可以解決空高變更問題的方法之一。但如果空高限制修改幅度過大,接近或超出雷達桅高度,通過修改雷達桅來解決問題則不可實現。
(2) 在設計修改雷達桅時,應充分綜合考慮雷達、信號燈、磁羅經、甲板結構加強、欄桿舾裝件等眾多因素,避免忽略某個因素而導致返工。
(3) 除雷達桅主桅體降低外,可倒式燈桅和升降式雷達座等舾裝附件是有效解決信號燈和雷達高度調整的方法。可倒式燈桅和升降式雷達座等安裝完成后,還應當通過功能試驗對其進行驗證。
(4) 本文討論的雷達桅為單主桅體結構后桅,可以為同類型的單主桅體雷達桅修改提供借鑒。對于另外一種常見的多支柱型雷達桅后桅,由于該型式雷達桅的雷達平臺較低,且平臺在船寬方向尺寸較大,艏艉方向相對較小,遇到同樣需求時,其修改方案需要另行討論,但其設計限制的相關條件與本文實例基本一致,可以選擇性地參考。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09
