復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng)在隨機(jī)采樣控制下的一致性分析
2019-08-17 07:40:04葉志勇王澤權(quán)林聰偉
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2019年7期
葉志勇,匡 艷,張 華,2,王澤權(quán),林聰偉
(1.重慶理工大學(xué) a.理學(xué)院; b.機(jī)械工程學(xué)院, 重慶 400054; 2.銅仁學(xué)院 大數(shù)據(jù)學(xué)院, 貴州 銅仁 554300)
在過去幾十年中,復(fù)雜動力網(wǎng)絡(luò)在生物神經(jīng)網(wǎng)絡(luò)、互聯(lián)網(wǎng)、智能電網(wǎng)和人類社會網(wǎng)絡(luò)等領(lǐng)域得到了廣泛的應(yīng)用[1-9],引起越來越多的研究者關(guān)注。到目前為止,許多研究者已經(jīng)提出了各種控制方案來處理復(fù)雜動力網(wǎng)絡(luò)的問題,如反饋控制[1]、自適應(yīng)控制[2]、魯棒控制[3]和脈沖控制[4]。
對復(fù)雜動力網(wǎng)絡(luò)系統(tǒng)的采樣控制主要從固定拓?fù)洹⑶袚Q拓?fù)洌挥邢驁D、無向圖;有時滯、無時滯等方面進(jìn)行研究。文獻(xiàn) [5]討論了Kuramoto-Sivashinsky 方程的分布式采樣控制,對n個傳感器在空間上提供時間采樣,并在采樣空間間隔上對狀態(tài)的分布進(jìn)行測量。文獻(xiàn)[6]考慮了脈沖輸入時滯,對非線性復(fù)雜動力系統(tǒng)的指數(shù)同步問題進(jìn)行了探討。當(dāng)隨機(jī)抽樣是一個伯努利分布時,考慮兩個不同的采樣周期,若發(fā)生概率為已知常數(shù),則文獻(xiàn)[7]將原始隨機(jī)采樣的馬爾可夫跳躍系統(tǒng)轉(zhuǎn)化為連續(xù)性馬爾可夫跳躍時滯系統(tǒng),從而研究輸入飽和隨機(jī)抽樣馬爾可夫跳躍系統(tǒng)的控制問題。文獻(xiàn)[8]討論了二階多智能體系統(tǒng)在通訊網(wǎng)絡(luò)拓?fù)涔潭ǖ那樾蜗拢瑢τ诓煌膭恿W(xué)行為給出更準(zhǔn)確的代數(shù)判據(jù)。
對于復(fù)雜動力網(wǎng)絡(luò)的穩(wěn)定性而言,其中一致性問題是最重要的行為之一。復(fù)雜網(wǎng)絡(luò)系統(tǒng)的一致性研究目前有很多研究成果[9-11]。文獻(xiàn)[9]分別得到了在固定的拓?fù)浣Y(jié)構(gòu)下的一致性和在切換拓?fù)浣Y(jié)構(gòu)下利用多項(xiàng)式的Hurwitz穩(wěn)定性,得到了帶有采樣信息的一致性。對于一般線性動力學(xué),文獻(xiàn)[10]討論了帶有時變采樣間隔的多智能體系統(tǒng)的采樣數(shù)據(jù)一致性問題。為了滿足1階多智能體系統(tǒng)漸近平均一致性的充要條件,文獻(xiàn)[11]采用時滯分解技術(shù),在離散時間下得到了一致性協(xié)議,從而實(shí)現(xiàn)了系統(tǒng)的一致性。
本文將研究復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng)在隨機(jī)采樣控制下的一致性問題。首先,建立復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng)。其次,引入控制器,通過分布式可控輸入得到誤差系統(tǒng)。再次,選取合適的李雅普諾夫函數(shù),利用輸入狀態(tài)穩(wěn)定理論得到系統(tǒng)穩(wěn)定的充分條件及采樣周期。
1 問題描述
1.1 預(yù)備知識

定義1[12]若非奇異實(shí)矩陣H的所有非對角線元素小于0,主對角線元素大于0,且H的特征值具有正實(shí)部,則非奇異實(shí)矩陣H是M矩陣。
引理1[13]對于適當(dāng)維數(shù)的矩陣A、B、C和D,下面的性質(zhì)成立:
① (μA)?B=A?(μB),μ是常數(shù);
② (A?B)(C?D)=(AC)?(BD);
③ (A?B)T=AT?BT;
④ (A+B)?C=A?C+B?C。
引理2[13]假設(shè)X∈RN×N是一個M矩陣,則存在正向量η=(η1,η2,…,ηN)T∈RN,使得XTη=1N且ΩX+XTΩ>0,其中Ω=diag{η1,η2,…,ηN}。
引理3[14]設(shè)V:[0,+∞)×Rn→R是連續(xù)可微函數(shù)滿足下面的不等式:


串聯(lián)式系統(tǒng)是狀態(tài)輸入穩(wěn)定的一個重要推廣,如下:
(1)
(2)
引理4[14]當(dāng)x1是輸入時,若動力學(xué)系統(tǒng)(2)在x1下為狀態(tài)輸入穩(wěn)定,且原系統(tǒng)(1)是全局一致漸進(jìn)穩(wěn)定的,則串聯(lián)式系統(tǒng)(1)和(2)是一致漸進(jìn)穩(wěn)定的。

(3)

1.2 模型描述
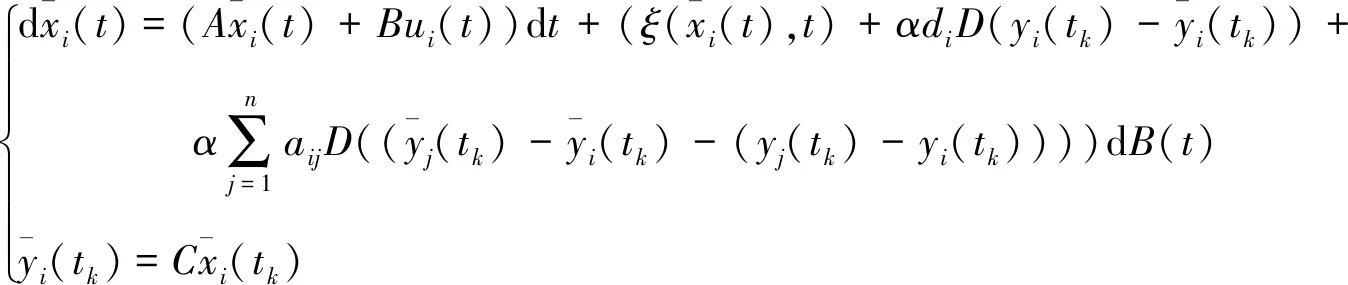
本文考慮如下的復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng)模型:

(4)

在實(shí)踐和工程應(yīng)用中,信息的狀態(tài)不是一直都可以進(jìn)行訪問的,從而導(dǎo)致了在設(shè)計控制輸入時需要利用輸出可測的yi(t)。假設(shè)輸出yi(t)在連續(xù)時間下的采樣時刻tk是可測的,且控制輸入在零階保持器方案下生成。因此,在節(jié)點(diǎn)i的分布式可觀測的響應(yīng)狀態(tài)方程描述如下:
(5)
其中分布式可控的輸入響應(yīng)設(shè)計為

(6)
這里,di={0,1},di=1時,當(dāng)且僅當(dāng)?shù)趇個節(jié)點(diǎn)在采樣時刻tk是確定的輸出誤差估計。
注1本文將采樣信息時刻作為信息連接節(jié)點(diǎn),即隨機(jī)擾動中含有采樣時刻[9-11],隨機(jī)項(xiàng)中不含采樣信息,因此本文更符合現(xiàn)實(shí)。
為了后面方便計算,采用以下的記法:
di=1時,方程簡寫為:
(7)
di=0時,方程簡寫為:
(8)
2 主要結(jié)果
以下將對系統(tǒng)(7)和(8)進(jìn)行一致性分析,其詳細(xì)的過程和結(jié)果由定理1給出。
定理1在假設(shè)1下,若反饋增益矩陣D、F是正定的,滿足下面的線性矩陣不等式:
(9)

(10)
以及采樣周期滿足

情況1在系統(tǒng)(7)下進(jìn)行考慮。
證明首先,建立如下的Lyapunov函數(shù):
(11)
其中K是正定矩陣。

(12)
由于(Ξ?K)是正定的,則在式(12)中得:
(13)
根據(jù)系統(tǒng)(7)可得:
(14)
在式(14)中,第1部分得:
(15)
在式(14)中,第2部分得:
(16)
在式(14)中,第3部分得:
(17)
將式(13)~(17)代入式(12)得:
(18)
利用下面的不等式成立:
則,
(19)
這里
V1(t)=maxV(t),t∈(tk,tk+1)
可知:
(20)
根據(jù)式(20)可知,需滿足下面的不等式:
因此,根據(jù)不等式(9)(10)和引理3可以得到LV<0。


(21)
E(V(x,t))≤e-δ1tE(V(x0,0))
情況2在系統(tǒng)(8)下進(jìn)行考慮。
證明首先,建立如下的Lyapunov函數(shù):
(22)
其中K1是正定矩陣。
(23)


(24)
根據(jù)式(24)可知,需滿足下面的不等式:
-(λmin(Λ)-ω2)>ω2w1T
因此,根據(jù)不等式(9)(10)和引理3可以得到LV<0。

(25)
E(V(x,t))≤e-δ2tE(V(x0,0))
注2文獻(xiàn)[6]和[10]中的采樣信息是利用ISS穩(wěn)定,僅檢查了V(x,t)的導(dǎo)數(shù),在文獻(xiàn)[13]中增加了控制輸入,未考慮采樣的隨機(jī)性。本文考慮了采樣的隨機(jī)性,且將采樣的信息作為連接信息傳輸?shù)墓?jié)點(diǎn)和輸入控制,更具有現(xiàn)實(shí)意義。
3 數(shù)值模擬
為了驗(yàn)證結(jié)論的有效性,對于復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng),在拓?fù)浣Y(jié)構(gòu)G下,通過用以下Chua’s電路描述動力學(xué)系統(tǒng)的每個節(jié)點(diǎn):
(26)
現(xiàn)在將Chua’s電路方程改寫為下面的形式:
dxi(t)=Axi(t)dt+Ψ(xi(t))dB(t)
(27)


選擇參數(shù)β=0.846 7,α=56.449 7,通過利用LMI計算可得反饋矩陣F和觀測矩陣D

位置狀態(tài)的時間響應(yīng)一致性軌跡在圖1和圖2中給出,則系統(tǒng)(7)和(8)實(shí)現(xiàn)一致性,因此理論的有效性就得以證明。
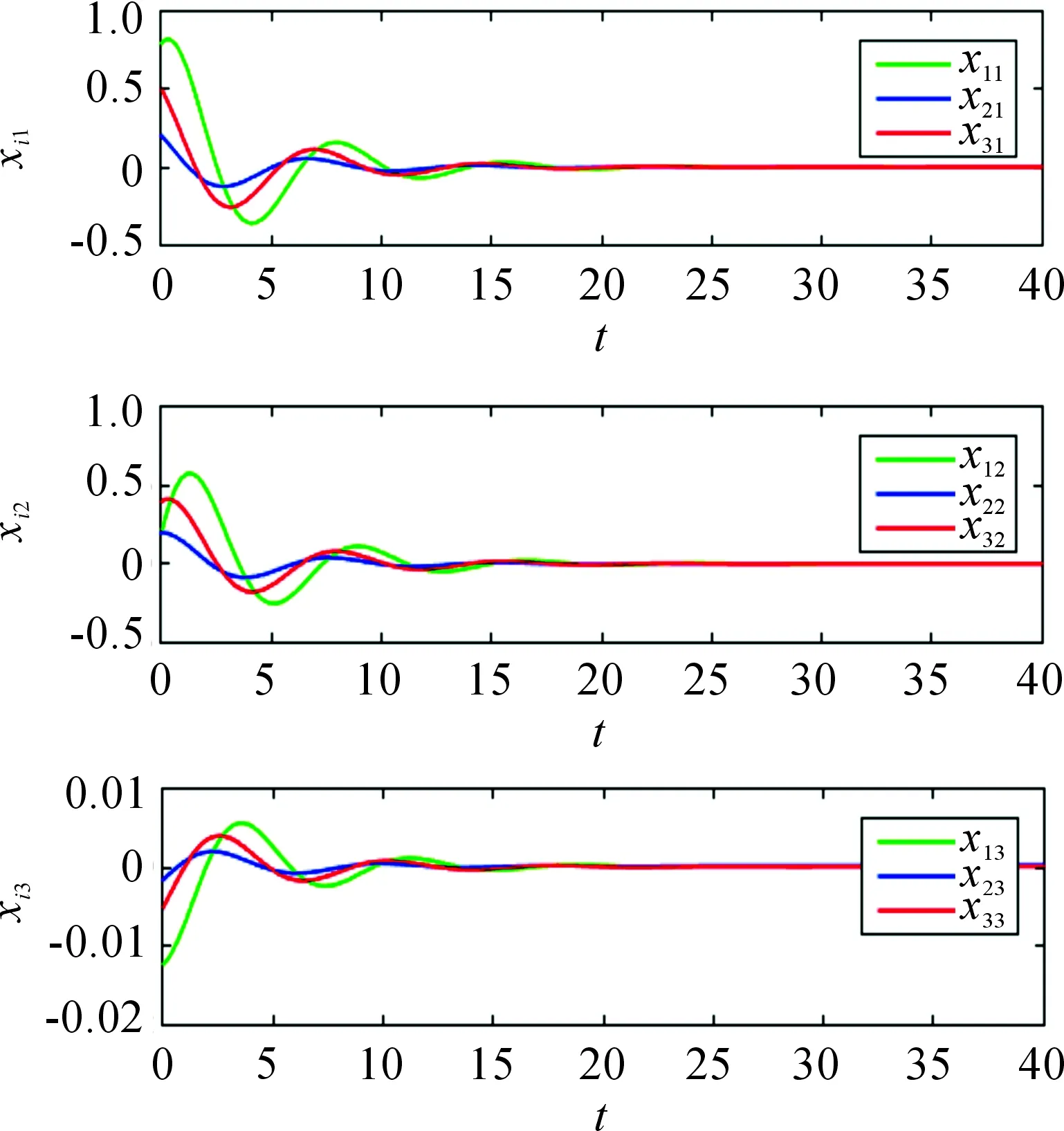
圖1 系統(tǒng)(5)的位置軌跡
4 結(jié)束語
本文研究了在無向拓?fù)浣Y(jié)構(gòu)中復(fù)雜動力學(xué)網(wǎng)絡(luò)系統(tǒng)在隨機(jī)采樣控制下實(shí)現(xiàn)一致性的問題。首先,建立不穩(wěn)定的動力學(xué)系統(tǒng),設(shè)計控制輸入,得到誤差方程。其次,利用Lyapunov函數(shù)和狀態(tài)輸入穩(wěn)定理論得到系統(tǒng)穩(wěn)定的充分條件,并說明Laplacian矩陣在分析系統(tǒng)穩(wěn)定性問題中的重要性。再次,當(dāng)系統(tǒng)滿足定理?xiàng)l件時,能夠達(dá)到一致性,并通過控制輸入?yún)?shù)和采樣周期使系統(tǒng)實(shí)現(xiàn)狀態(tài)輸入穩(wěn)定。最后,通過數(shù)值仿真說明了定理的有效性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
燕山大學(xué)學(xué)報(2015年4期)2015-12-25 02:19:49
中外會展(2014年4期)2014-11-27 07:46:46