收獲機虛擬環(huán)境模型與仿真平臺構(gòu)建
2019-08-13 01:42:24曾澤欽鄒湘軍賈春洋
農(nóng)業(yè)機械學(xué)報 2019年7期
陳 燕 曾澤欽 王 杰 鄒湘軍 賈春洋 張 坡
(1.華南農(nóng)業(yè)大學(xué)工程學(xué)院, 廣州 510642;2.華南農(nóng)業(yè)大學(xué)南方農(nóng)業(yè)機械與裝備關(guān)鍵技術(shù)教育部重點實驗室, 廣州 510642)
0 引言
農(nóng)業(yè)機械設(shè)計研究需要大量的野外試驗[1],對糧食作物及農(nóng)產(chǎn)品收獲機的研究,需等待收獲季節(jié),嚴(yán)重影響設(shè)備的研發(fā)周期[2]。虛擬現(xiàn)實的虛擬設(shè)計與三維仿真及其人機交互技術(shù)具有安全可靠的特點,可縮短設(shè)計周期,提高設(shè)計品質(zhì)[1,3]。虛擬現(xiàn)實技術(shù)在工業(yè)、農(nóng)業(yè)、軍事、醫(yī)學(xué)和教育等各個應(yīng)用領(lǐng)域已取得很多研究成果[3-10]。
隨著三維建模技術(shù)的發(fā)展,仿真技術(shù)趨向成熟,許多研究者采用仿真技術(shù)構(gòu)建作業(yè)環(huán)境,用于農(nóng)業(yè)機械設(shè)計。文獻[11-12]開發(fā)了水果采摘機器人虛擬設(shè)計與仿真系統(tǒng);文獻[13]開發(fā)了交互式聯(lián)合收獲機仿真系統(tǒng),用于評估新型收獲技術(shù);還有許多研究者通過Untiy3D虛擬平臺開發(fā)虛擬作業(yè)環(huán)境,用于各類農(nóng)業(yè)裝備試驗[14-18]。在開發(fā)虛擬環(huán)境仿真平臺時,采用有限元分析、面片操作等技術(shù)可模擬出植株變形細節(jié)[19-23],但其處理的數(shù)據(jù)量大,不適用于場景展示;采用靜態(tài)模型、圖形處理器等技術(shù)可減少模型數(shù)據(jù)量[11-18],有利于環(huán)境展示,但缺少動態(tài)變化。
本文采用Unity3D虛擬平臺,以玉米收獲機為例,構(gòu)建虛擬收獲環(huán)境及其仿真平臺,試驗分析植株收獲期間及其在風(fēng)雨影響下的受力狀態(tài)變化,仿真評估收獲機械的作業(yè)性能,為開發(fā)交互式收獲機械仿真平臺、實現(xiàn)收獲機械的設(shè)計創(chuàng)新以及整機作業(yè)行為和性能的仿真試驗提供技術(shù)支持。
1 仿真平臺架構(gòu)與原理
以玉米收獲機為例,采用Unity3D虛擬平臺,以C#編程語言構(gòu)建收獲機械虛擬收獲環(huán)境及其仿真平臺。
1.1 系統(tǒng)結(jié)構(gòu)
收獲機械仿真平臺系統(tǒng)結(jié)構(gòu)如圖1所示,分為6個模塊:①視角控制器:作為控制界面,可以控制視角與其他模塊參數(shù)的輸入輸出。②收獲機械控制器:具有收獲機械的各類特性,如割臺系統(tǒng)、移動系統(tǒng)與轉(zhuǎn)向系統(tǒng)等。③植株控制器:具有植株模型的各類特性,如植株數(shù)據(jù)系統(tǒng)、植株生成系統(tǒng)等。④環(huán)境展示控制器:具有風(fēng)、雨效果,可控制風(fēng)雨大小與方向。⑤模型庫:存儲收獲機械、植株與地形等模型。⑥數(shù)據(jù)庫:存儲收獲機械的運動參數(shù)、收獲結(jié)果與植株模型的結(jié)構(gòu)參數(shù)等。
通過添加Unity3D物理碰撞組件,結(jié)合虛擬物理引擎,可模擬收獲機械割臺與植株模型互動狀況,以及實現(xiàn)風(fēng)雨對植株的影響作用。

圖1 收獲機械仿真平臺系統(tǒng)結(jié)構(gòu)圖Fig.1 System structure of harvest equipment simulation platform
1.2 視角漫游模式的選擇
視角變化是影響虛擬沉浸度與評價虛擬環(huán)境效果的重要部分[15]。一般分兩類視角漫游模式:自動漫游與人工漫游。
自動漫游即視角沿著設(shè)定好的路徑與角度進行平移與旋轉(zhuǎn),適用于非交互性的展示。本文在展示全景時使用自動漫游模式,其步驟如圖2a所示。先在高處進行俯視,展示環(huán)境分布概況;然后,視角高度下降至適合高度“抬頭”——從俯視漸變?yōu)槠揭暎h(huán)視一周展示全景近況;最終視角移動至正對收獲機械,并將視角中心鎖定為收獲機械,進入人工漫游模式。

圖2 自動漫游流程與人工漫游示意圖Fig.2 Process diagrams of automatic and manual roamings
人工漫游是人機交互的重要組成部分,主要觀察對象是收獲機械與植株,重點是收獲機械與植株的交互狀況。以收獲機械為視角中心,利用鼠標(biāo)控制視角旋轉(zhuǎn)與遠近,鍵盤輔助控制視角平移,如圖2b所示。設(shè)鼠標(biāo)水平方向的移動量為D,通過轉(zhuǎn)換系數(shù)S將鼠標(biāo)的水平移動量轉(zhuǎn)換為視角相對于中心的旋轉(zhuǎn)量θ和視角自身水平旋轉(zhuǎn)角φ,φ與θ定義為
φ=-θ=-DS
(1)
(2)
式中 [xyz]T——視角在空間的平移矩陣,m
r——相機與中心點間在水平面的投影距離,m
[xkeyboardykeyboardzkeyboard]T——鍵盤控制視角平移的平移矩陣,m
2 虛擬收獲環(huán)境構(gòu)建
對于虛擬環(huán)境構(gòu)建,三維模型是其重要基礎(chǔ)[9]。研究重點為收獲仿真,需構(gòu)建收獲機械與植株的仿真模型,同時還需構(gòu)建行為控制模型實現(xiàn)兩者的交互。
2.1 收獲機械模型
以某收獲機械傳動系統(tǒng)及其變速箱為設(shè)計原型,如圖3所示。該聯(lián)合收獲機可用于多種谷物收獲,且?guī)в袚芎梯喌母钆_結(jié)構(gòu)有利于觀察收獲狀況;變速箱分慢8擋、快8擋與倒8擋共有24擋變速,可提供多種行進速度的選擇。

圖3 仿真原型Fig.3 Model prototype
收獲機械由大量的部件與零件組成,且每個部件含大量零件,而在虛擬環(huán)境中,每個可視對象均需要網(wǎng)格信息與紋理信息,包括頂點信息、面片索引信息等數(shù)據(jù)。在虛擬環(huán)境中按照收獲機械實際的復(fù)雜程度顯示占用的數(shù)據(jù)量太大。因此,去除非觀測的部件與零件,收獲機械模型主要分成車體模塊、割臺模塊與功能模塊。車體模塊包括車體外殼、車輪等外觀部分。割臺模塊包括撥禾輪、切割刀具等收獲部分。功能模塊包括收獲機械的物理組件與腳本組件,如剛體組件、碰撞體組件、車體移動腳本與割臺控制腳本等,如圖4所示。

圖4 收獲機械模型Fig.4 Harvest equipment model
2.2 虛擬植株模型
植株由莖稈、葉子和果實構(gòu)成,為了模擬植株的收獲狀態(tài),根據(jù)植株的流變特性,利用虛擬彈簧與虛擬墻構(gòu)建植株模型,使其能夠根據(jù)風(fēng)雨作用力或碰撞發(fā)生相應(yīng)的變化。
2.2.1植株莖稈模型
農(nóng)業(yè)物料可通過彈性體、黏性體與塑性體的組合模擬其實際流變特性[23]。本文采用麥克斯韋模型(Maxwell model)模擬植株流變特性,模型由一個彈簧和一個粘壺串聯(lián)組成,可表示物料應(yīng)力松弛過程,如圖5a所示。Unity3D中的彈簧關(guān)節(jié)組件可以設(shè)置彈力組件與阻尼組件,可用彈簧關(guān)節(jié)組件構(gòu)成麥克斯韋模型模擬植株的變形狀況,其定義為
(3)
式中ε——應(yīng)變
σ——應(yīng)力,Pa
E——物料的彈性模量,Pa
η——物料阻尼系數(shù),Pa·s
t——時間,s
有限元分析是物料仿真研究慣用方法[19,21],細化模型網(wǎng)格,可將彈性元件散布到微小單元模擬實際物料變化狀況。因此,效仿有限元仿真方法——離散梁法[19],采用圓柱體剛性桿與虛擬彈簧連接構(gòu)成植株莖稈模型,如圖5b所示,可通過圓柱體數(shù)量調(diào)整植株占用數(shù)據(jù)量。

圖5 植株莖稈模型Fig.5 Plant stem model
2.2.2虛擬墻
莖稈模型受力會出現(xiàn)大間隙,設(shè)置虛擬墻限制莖稈每節(jié)圓柱體的分離。在莖稈每節(jié)圓柱體連接處設(shè)置虛擬墻面,將圓柱體限制在墻面中間。
2.2.3植株模型
將建好的葉子與果實模型添加在莖稈模型上構(gòu)建出植株模型,利用陣列操作可構(gòu)建成組的植株模型,如圖6所示。

圖6 植株模型構(gòu)建Fig.6 Plant model construction
2.3 收獲機械、風(fēng)雨與植株的交互
2.3.1收獲機械與植株作業(yè)行為建模與交互規(guī)則
虛擬對象的行為表達可由行為模型與認(rèn)知模型構(gòu)成。行為模型是虛擬對象對外部變化的直接反應(yīng),所模擬的行為應(yīng)符合現(xiàn)實世界中的基本運動和行為規(guī)律;認(rèn)知模型是虛擬角色對獲取的信息進行分析、決策執(zhí)行過程的一種描述。
根據(jù)收獲作業(yè)狀況,將行為控制模型分為不具備認(rèn)知的應(yīng)激行為與基于認(rèn)知的反饋行為。應(yīng)激行為是對象本身特性的體現(xiàn),如剛體、碰撞體等特性,可視化結(jié)果為植株與收獲機械根據(jù)重力系統(tǒng)在環(huán)境平臺上停留、植株受力后產(chǎn)生偏移等現(xiàn)象;反饋行為是認(rèn)知系統(tǒng)對外部變化的判斷與推理,根據(jù)推理結(jié)果指導(dǎo)對象行為表現(xiàn),可視化結(jié)果為植株被割刀割斷、進入收獲口的植株會消失等現(xiàn)象。一個外部變化可引起模型多部分的行為表現(xiàn),多個行為融合形成作業(yè)現(xiàn)象,如圖7所示。

圖7 行為控制模型Fig.7 Model of behavioral controls
反饋行為可形成行為推理規(guī)則,設(shè)行為推理規(guī)則是規(guī)則R的集合[26],定義為
R={R1,R2,…,Rn}
(4)
對任意行為有如下規(guī)則描述:根據(jù)第i個規(guī)則,對條件Fi推理并決策,決策結(jié)果傳輸?shù)綀?zhí)行節(jié)點輸出行為Ai,與其他行為產(chǎn)生的可視化現(xiàn)象為Pi,定義為
Ri:IFFiTHENAiSHOW ASPi(i=1,2,…,n)
根據(jù)收獲狀況,收獲機械與植株的交互行為推理規(guī)則描述如下:
R1:IF 啟動割臺 THEN 撥禾輪按照設(shè)定好的扭矩轉(zhuǎn)動 AND 割刀觸發(fā)器開啟 SHOW AS 撥禾輪轉(zhuǎn)動可拖拽植株,割刀可切割植株,不會被植株阻礙前進。
R2:IF 植株與割刀接觸 THEN 計算植株切割處位置 AND 植株切割處圓柱體的連接解除 SHOW AS 植株可被割刀割斷。
R3:IF 植株進入收獲口 THEN 計算進入植株中果實數(shù)量,消滅植株,釋放數(shù)據(jù) SHOW AS 植株消失,收獲量增加。
根據(jù)行為推理規(guī)則,建立收獲機械與植株的交互規(guī)則,如圖8所示。根據(jù)收獲作業(yè)流程,收獲機械先利用撥禾輪滾動限制植株位移;然后,割刀與植株接觸,解除植株切割處的連接,使植株根部留在地面上,上部被撥禾輪拖拽入割臺;割臺螺旋推運器帶動植株送往收獲口;最后,當(dāng)植株被送入收獲口,計算其中果實模型數(shù)量即收獲量數(shù)據(jù),并將進入收獲口的植株消滅以釋放數(shù)據(jù)。

圖8 收獲機械與植株的交互規(guī)則Fig.8 Interaction rules between harvesting equipment and plants
2.3.2風(fēng)雨與植株的交互行為
為模擬出真實環(huán)境的復(fù)雜條件,設(shè)計了風(fēng)雨效果。環(huán)境對植株主要的影響是風(fēng)雨作用力,風(fēng)作用力是無形的方向力,雨作用力是液滴碰撞植株產(chǎn)生的力。風(fēng)雨對植株的影響是植株模型受風(fēng)雨的力產(chǎn)生的應(yīng)激性反應(yīng),可視化結(jié)果為順著風(fēng)、雨的方向變形。
將風(fēng)、雨兩者均轉(zhuǎn)換為無形的方向力,且雨的展示效果通過Unity3D的粒子動畫系統(tǒng)實現(xiàn)。設(shè)定風(fēng)的初始方向為水平向前,雨的方向為垂直向下,風(fēng)雨對植株的作用力定義為
(5)
式中 [FxFyFz]T——植株莖稈每節(jié)圓柱體的各向受力,N
q——風(fēng)對植株的均布載荷,N/m
進一步激勵和支持企業(yè)加大研發(fā)投入,以前沿引領(lǐng)技術(shù)、現(xiàn)代工程技術(shù)、顛覆性技術(shù)創(chuàng)新作為突破口,提高知識產(chǎn)權(quán)的創(chuàng)新能力,把創(chuàng)新型企業(yè)當(dāng)作發(fā)展目標(biāo),發(fā)展自主核心技術(shù)。同時,鼓勵企業(yè)積極在全球產(chǎn)業(yè)鏈中進行知識產(chǎn)權(quán)布局,可以通過建立海外代工廠消減加征關(guān)稅影響,或者利用提高技術(shù)許可費從而提高海外同類產(chǎn)品價格的方式有效反擊“301調(diào)查”。
Lsection——植株莖稈每節(jié)圓柱體的均布載荷長度,m
ψ——風(fēng)力在水平面上與向前矢量的夾角,rad
φ——風(fēng)力在垂直面上與垂直向下矢量的夾角,rad
N——雨的數(shù)量等級對應(yīng)的載荷,N
C——植株葉面接觸面積系數(shù)
3 仿真試驗與結(jié)果分析
3.1 試驗設(shè)計與方法
為驗證構(gòu)建的植株模型和虛擬收獲環(huán)境符合收獲仿真需求,并可用于收獲機械作業(yè)行為及性能的仿真試驗,首先應(yīng)用所構(gòu)建的收獲機械仿真平臺進行驗證試驗。驗證試驗后,進行不同條件下的收獲仿真試驗,評估收獲機械的作業(yè)性能。仿真試驗設(shè)計如下:
(1)風(fēng)雨作用下植株的狀態(tài)變化試驗
為驗證所構(gòu)建的植株模型可模擬植株受力彈性變化,將風(fēng)、雨作用力均轉(zhuǎn)換為無形的方向力,選取方向力為1 N,進行風(fēng)雨對植株作用的模擬試驗。試驗后,統(tǒng)計植株不同位置(將植株由下往上分成4段)的變形數(shù)據(jù),分析植株在風(fēng)雨作用下的狀態(tài)變化和變形特點。每組試驗重復(fù)20次。
為模擬玉米的收獲行為過程,選取收獲機高低2擋行進速度(0.124 m/s和0.939 m/s)進行收獲仿真試驗,試驗過程觀察收獲行為、收獲過程的漏果、漏節(jié)和植株被甩飛的狀況。每組試驗重復(fù)5次。
(3)收獲機械對植株的收獲性能試驗
選取收獲機械行進速度和植株密度為試驗因子分別進行單因素收獲試驗,考慮試驗因子對收獲機械的收獲性能影響,行進速度按照1204型變速箱設(shè)置5個擋位,分別為0.124、0.156、0.231、0.358、0.939 m/s;植株密度設(shè)置3個水平,分別為4.6、9.2、18.4株/m2。每組試驗重復(fù)20次,試驗后統(tǒng)計收獲個數(shù),計算漏果率。漏果率計算式為
(6)
式中ωf——漏果率
qT——果實總數(shù)量
qS——收獲果實數(shù)量
3.2 結(jié)果分析
3.2.1風(fēng)雨作用下植株的變化
風(fēng)雨作用下同一排植株的位移和速度隨時間變化的曲線具有相似性,圖9是中間位置植株的位移和速度曲線。

圖9 風(fēng)雨作用下植株變化曲線Fig.9 Variation curves of plants under influence of wind and rain
由圖9可見,在風(fēng)雨作用下,植株各段向力方向偏移,節(jié)點越高偏移幅度越大,而且偏移速度越大;偏移值達到最大后(此時速度為0)發(fā)生彈復(fù)現(xiàn)象,植株逐漸恢復(fù)原態(tài);整個偏移過程,植株的速度變化趨勢類似于正弦曲線。因此,本文所構(gòu)建的植株模型可模擬植株受力彈性變化。
3.2.2收獲過程中的植株狀態(tài)
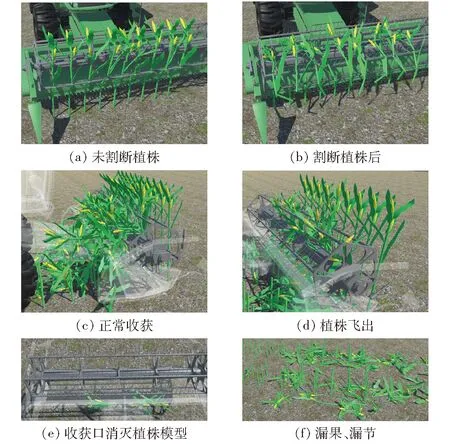
圖10 虛擬收獲仿真Fig.10 Simulation of virtual harvest situation
植株收獲行為觀察試驗結(jié)果如圖10所示,其仿真收獲過程符合收獲作業(yè)流程:首先撥禾輪先限制植株,然后割刀割斷植株,接著植株被撥禾輪拽入割臺由螺旋推運器送往收獲口。正常收獲狀態(tài)如圖10c所示,期間會出現(xiàn)漏果、漏節(jié)的情況(圖10f)。收獲機行進速度過高時,會出現(xiàn)植株被甩飛的狀況(圖10d)。試驗表明,植株模型符合收獲仿真需求,可用于收獲機械作業(yè)行為及性能的仿真試驗。
3.2.3收獲機行進速度和植株密度對漏果率的影響
圖11為不同植株密度下收獲機行進速度對漏果率的影響曲線。由圖可見,漏果率隨著行進速度的提高而快速下降,但速度超過0.385 m/s時下降緩慢,而且植株密度越高,漏果率下降越緩慢。仿真結(jié)果與文獻[28-30]的結(jié)論一致。進一步方差分析表明,行進速度和植株密度均對收獲機械的收獲性能影響顯著(P<0.01)。
4 結(jié)論
(1)借鑒有限元仿真分析方法,將植株莖稈分成多個圓柱體,利用虛擬彈簧和虛擬墻構(gòu)建植株模型,模擬其受力狀態(tài);同時,根據(jù)作業(yè)狀況建立行為控制模型,分為不具備認(rèn)知的應(yīng)激行為與基于認(rèn)知的反饋行為,根據(jù)行為推理規(guī)則形成交互規(guī)則,實現(xiàn)收獲機械與植株之間的交互。

圖11 不同行進速度下收獲漏果率Fig.11 Harvesting fruit loss rate at different travel speeds
(2)多組收獲仿真試驗表明,虛擬環(huán)境建模可靠,農(nóng)業(yè)裝備模型運行正常,與植株交互效果真實;所構(gòu)建仿真平臺有效,漏果率隨著收獲機行進速度的提高而快速減小,植株密度越高,漏果率下降越緩慢,符合實際收獲規(guī)律。
(3)構(gòu)建的收獲仿真平臺可進行收獲機械作業(yè)性能評估。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
