基于非線性PID控制的挖掘機液壓系統穩定性研究
2019-08-06 11:21:10羅娜娜
中國工程機械學報 2019年4期
關鍵詞:方法
羅娜娜,李 廣
(1.吉林工業職業技術學院 基礎部,吉林 吉林 132000; 2.天津科技大學 機械工程學院,天津 300222)
挖掘機液壓系統主要包括液壓缸、液壓泵、液壓馬達、控制閥及油管等[1].液壓驅動以油作為能量介質,通過液壓泵把機械能轉換為壓力能,完成各種驅動動作[2-3].伴隨電液技術的迅速發展,挖掘機的控制方法也在不斷改進,逐漸走向了智能化發展道路.挖掘機在液壓驅動過程中,若速度控制不穩定,不僅造成燃油消耗過大,而且導致挖掘機發生嚴重抖動.因此,研究挖掘機液壓驅動控制系統,對于提高挖掘機的市場競爭力具有促進作用.
為了提高挖掘機液壓控制的穩定性,研究者對挖掘機液壓控制技術進行廣泛研究.文獻[4]研究了挖掘機BP神經網絡PID控制方法,構建BP神經網絡模型,對傳統PID控制方法進行改進,設計了BP神經網絡PID控制流程,通過仿真模型驗證挖掘機BP神經網絡PID控制效果,提高了挖掘機液壓驅動控制精度.文獻[5-6]研究了液壓挖掘機模糊PID控制方法,創建鏟斗液壓系統模型簡圖,對傳統PID控制進行改進,設計模糊PID控制流程并進行仿真,液壓系統采用模糊PID控制不僅響應速度快,而且跟蹤精度較高.文獻[7-8]研究了液壓挖掘機轉速的PID控制方法,分析了挖掘機電機轉速要求,通過負載識別參數進行在線修正電機輸出轉速,設計單神經元PID控制流程,通過仿真驗證單神經元PID控制效果,結果表明:單神經元PID控制器調節速度響應快,控制精度較高.但是,以往研究的液壓挖掘機受到負載突變干擾時,其活塞速度變化較大,不能很好地滿足液壓驅動工作需要.對此,本文建立了挖掘機液壓驅動簡圖模型,推導出活塞運動方程式.采用非線性PID控制方法,設計挖掘機液壓驅動控制系統.在無負載突變和有負載突變干擾情形下,分別對挖掘機PID控制和非線性PID控制方法進行仿真,為深入研究挖掘機液壓控制系統的穩定性提供了理論依據.
1 液壓系統數學模型
本文采用液壓驅動挖掘機臂運動,其結構如圖1所示.
液壓驅動工作原理如下:該液壓系統在工作時,開啟電動機的電源,電動機旋轉并帶動液壓泵工作,液壓泵將油箱中的液壓油抽吸出來,并在單向節流閥Qs的作用下將液壓油輸送至2位2通電磁閥進油口P位置處,此時電磁閥出油口A處打開(電池閥左側通電),則液壓油從A處進入液壓缸的無桿腔內,無桿腔內充滿液壓油后將液壓桿向
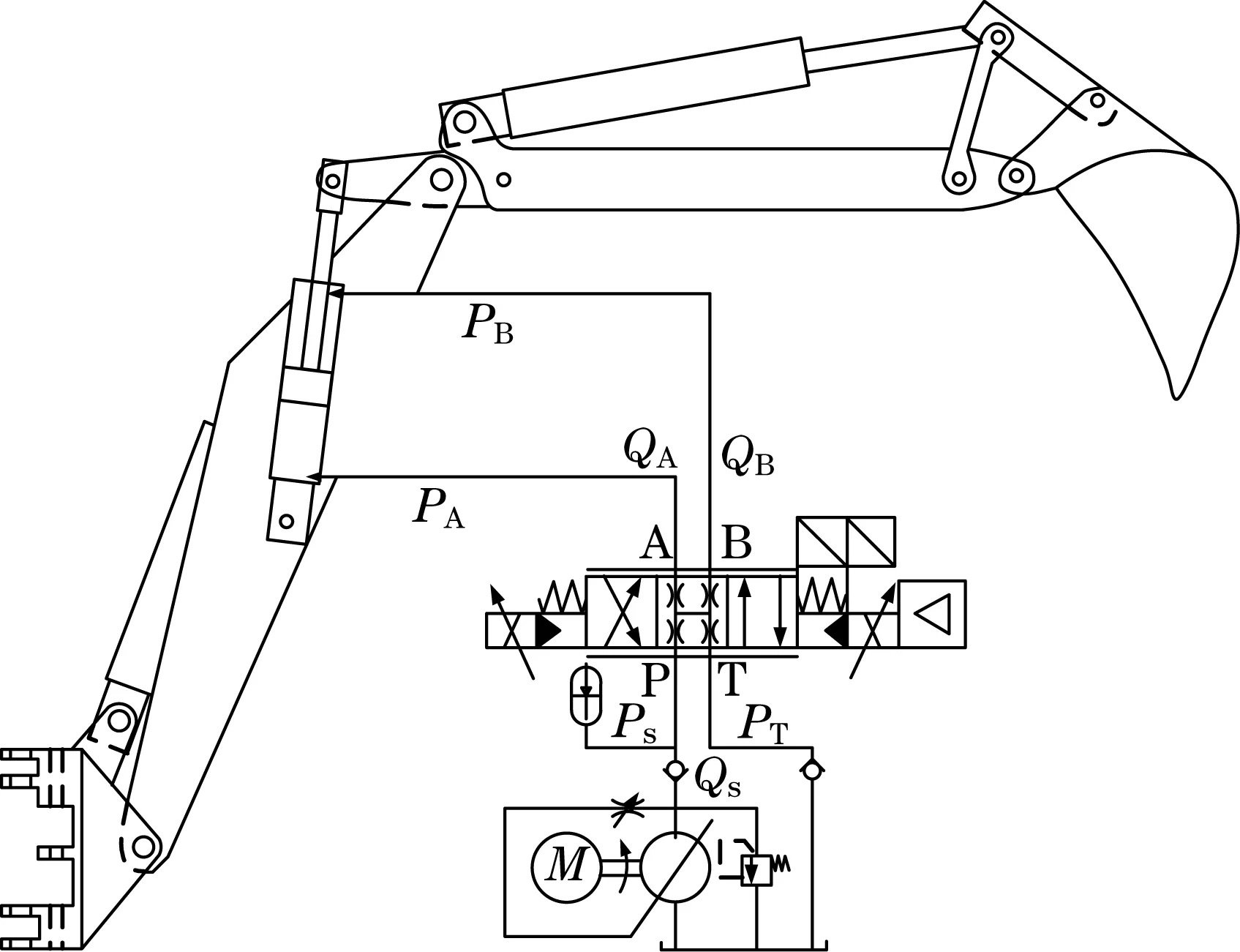
圖1 挖掘機液壓驅動結構Fig.1 Hydraulic driving structure of excavator
前推進,則帶動與其相連的結構做順時針運動;當電磁閥出油口A處關閉(電池閥左側斷電),而B處打開(電池閥右側通電),則液壓油從P到B處并進入液壓缸的有桿腔內;待有桿腔內充滿液壓油后,則將出油口A處再打開;無桿腔內的液壓油經過A到T處并經過PT口流出,再經過單向節流閥重新回到油箱中.非對稱液壓缸驅動結構如圖2所示.

圖2 非對稱液壓缸驅動結構Fig.2 Driving structure of asymmetric hydraulic cylinder
在圖2中:u(t)表示比例閥控制信號;Ps表示油源壓力;FL表示負載;xv(t)表示比例閥閥芯位移;xp(t)為液壓缸活塞位移;x(t)表示負載位移;v(t)表示活塞運動速度;K表示系統彈簧系數.
xv(t)與xp(t)滿足以下關系式[9]:
(1)
式中:Kqs為流量增益系數;Kcs為壓力系數;A1為無桿腔活塞面積;Cps,Css為等效油液泄露系數;β為油液彈性模量;M為活塞和負載質量;Vt1為液壓缸進油腔等效容積.
負載位移與活塞位移存在以下關系:
(2)
對式(2)求導,可以得到負載速度為
(3)
2 液壓系統控制
2.1 PID控制
PID控制由比例單元P、積分單元I和微分單元D組成,其控制原理如圖3所示.

圖3 PID控制流程Fig.3 PID control flow
PID控制的誤差方程式為
(4)
式中:r(t)為理論輸入值;y(t)為實際輸出值.
將誤差e(t)進行比例、積分和微分調節后進行相加,得到PID控制器的輸出量,從而實現執行器的在線控制.PID控制方程式[10]為
(5)
式中:Kp為比例系數;Ki為積分系數;Kd為微分系數.
2.2 非線性PID控制
傳統PID控制輸出控制量u(t)受到誤差e(t)、比例系數、積分系數和微分系數線性組合的影響.r(t)一般是不可微的,而且是不連續,輸出控制結果y(t)又受到外界噪聲環境的影響.因此,偏差信號也就不可微,其微分控制信號很難被采集.為了克服以上缺點,采用非線性PID控制方法替代傳統PID控制.采用非線性PID控制的液壓系統結構如圖4所示.

圖4 液壓非線性PID控制系統Fig.4 Hydraulic nonlinear PID control system
液壓控制系統的變量方程式為
式中:ε0,ε1,ε2為誤差;Z11,Z12為輸入信號;Z21,Z22為反饋信號.
采用非線性組對傳統PID控制誤差、微分和積分進行處理,產生控制量u(t).傳統PID控制器的輸入信號采用的是輸入和輸出誤差,非線性PID控制采用非線性對輸入和輸出信號進行處理后,得到新的誤差、微分和積分.
非線性PID控制方程式[11]為
(9)
式中:β0,β1,β2為增益系數;α0,α1,α2為[0,1]之間的實數;δ為積分參數.
3 仿真與分析
為了比較傳統PID控制和非線性PID控制效果,采用Matlab軟件對液壓伺服系統速度響應進行仿真,仿真參數設置如下:A1=0.08 m2,Kqs= 1.32 m2/s,Kcs=3.22×10-9m5/(N·s),M=13 000 kg,β=1.0×109Pa,α=0.8,δ=5,β0=9.5,β1=40,β2=1.2.液壓缸活塞參考運動速度為v=0.2cos(πt) m/s.在無負載條件下,液壓缸活塞速度響應曲線仿真結果如圖5所示.
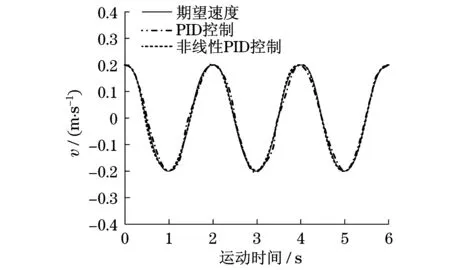
圖5 活塞速度響應曲線(無負載干擾)Fig.5 Piston velocity response curve (no load disturbance)
根據圖5可知:在無負載干擾條件下,采用傳統PID控制和非線性PID控制方法,都能實現液壓缸活塞速度響應的跟蹤.
在有負載條件下(負載質量為100 kg),液壓缸活塞速度響應曲線仿真結果如圖6所示.
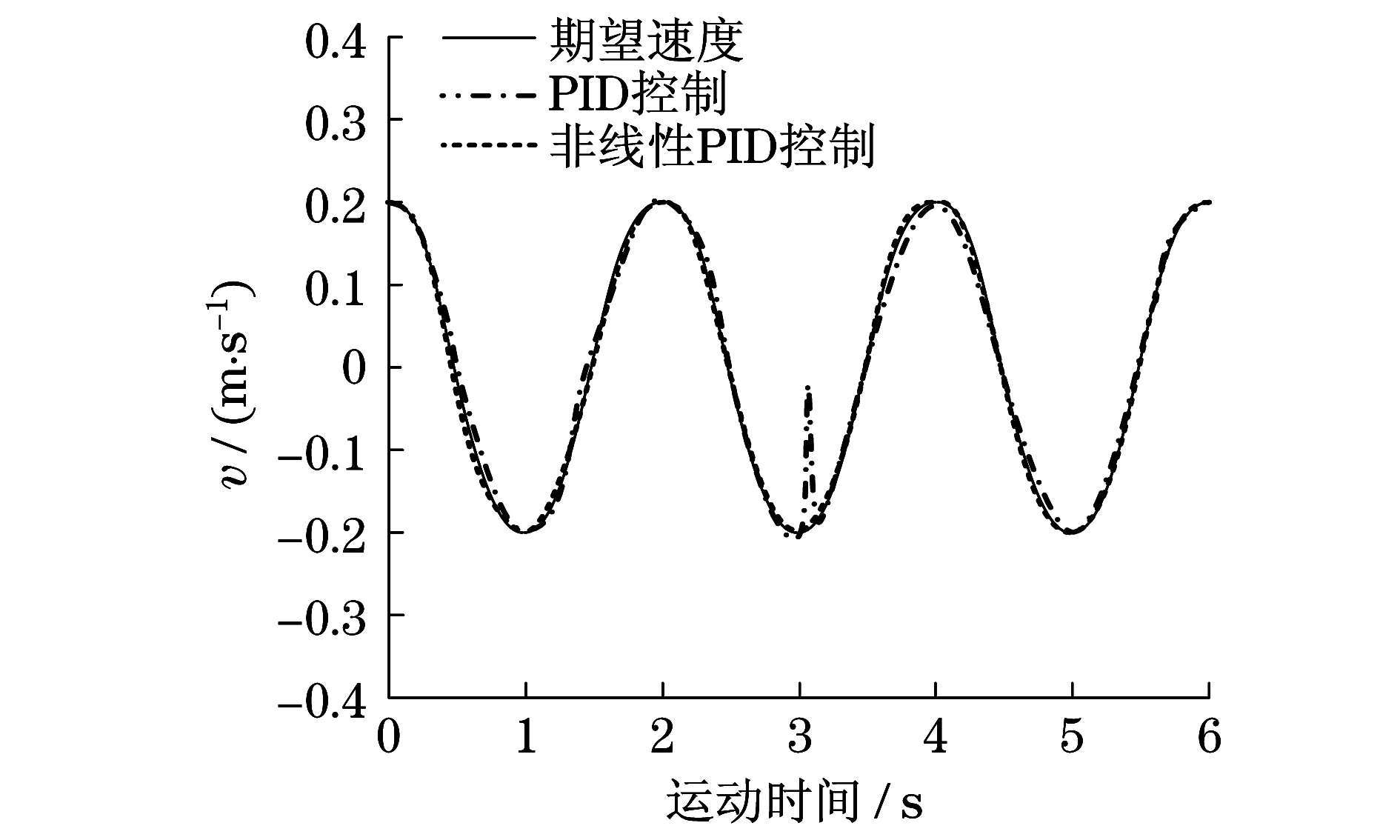
圖6 活塞速度響應曲線(有負載干擾)Fig.6 Piston velocity response curve (with load disturbance)
根據圖6可知:在有負載干擾條件下,在第3 s突然施加負載,傳統PID控制速度就會發生大幅度抖動現象,速度從0.2 m/s降低到0.025 m/s,而非線性PID控制速度基本保持不變,沒有發生突變情況.因此,采用非線性PID控制能夠抑制突然施加負載的干擾,保持液壓驅動系統運動的穩定性.
4 結論
針對挖掘機液壓驅動響應速度不穩定問題,設計了非線性PID控制方法,主要結論如下:
(1) 采用傳統PID控制方法,挖掘機液壓驅動系統活塞運動不穩定,容易受到負載干擾的影響,抖動幅度較大.
(2) 采用非線性PID控制方法,能夠在線自適應調節控制器參數,抑制突然施加負載的干擾,液壓缸活塞運動相對穩定.
(3) 采用Matlab軟件對非線性PID控制進行仿真,可以得到活塞速度響應曲線,能夠及時改進不合理之處,從而提高設計效率.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56