全地形車平順性測試系統開發與應用
2019-08-06 11:21:10徐中明
中國工程機械學報 2019年4期
余 烽,徐中明,屈 賢
(1.重慶工程職業技術學院 機械工程學院,重慶 402260; 2.重慶大學 機械傳動國家重點實驗室,重慶 400030)
全地形車在伊拉克戰爭中被全球廣泛認知.因能在各種惡劣的路面上行駛,軍用潛力巨大,很多國家的特種部隊都配備了各種類型的全地形車,用于偵探、移動攻擊等.另外,全地形車也用于競技、休閑、娛樂等多個領域.
全地形車的平順性不僅關系到軍用水平,更是市場推廣的核心競爭因素.目前國產全地形車主要處于仿制的狀況,平順性狀況和國外產品差距較大[1-4].因此,開發適合于全地形車平順性測試系統非常有實用價值.
借鑒ISO 2631,ISO 5349等國際標準[5-7],本研究開發了適合全地形車平順性評價硬件測試系統,并在匹配硬件測試系統的基礎上,借助德國IMC公司的FAMOS開發環境設計了軟件分析系統,進而開發了完整的全地形車平順性測試系統.
采用開發的全地形車平順性測試系統,對多款全地形車進行了平順性測試分析,并將評價結果和專業試車員的主觀評價結果進行對比.結果表明:該測試系統能正確、快速地對全地形車平順性進行評價,為平順性的改進提供理論依據.
1 硬件測試系統開發
參照ISO 2631,ISO 5349等國際標準,全地形車平順性的測量需要采集人體與全地形車接觸點的振動加速度,包括手把處、座位處及腳踏處振動加速度.
1.1 硬件測試系統要求
振動加速度傳感器主要根據靈敏度、響應特性、線性范圍、可靠性及精確度幾個方面選擇[8].針對全地形車的振動特性及多次分析對比,座位處傳感器應能測量中心頻率為0.5~300 Hz的振動加速度,手把處和腳踏處傳感器應能測量中心頻率為6.3~1 000 Hz的振動加速度.
根據以上要求,座位處傳感器選用美國PCB型三向壓電傳感器,無需單獨供電,支持ICP型傳感器的采集器均能對其供電.手把處選用PCB公司的ICP型三向加速度傳感器,腳踏處選用PCB公司的ICP型單向加速度傳感器.
采集器的選擇主要從A/D分辨率、最高采樣率、信噪比、量程、數據傳輸/存儲方式等方面去考慮.根據QC/T 474—1999《客車平順性評價指標及限值》及GB/T 4970—1996《汽車平順性隨機輸人行駛試驗方法》標準要求,頻率范圍0.1~1 000 Hz,動態范圍100~166 dB,誤差0.5 dB,信噪比應優于40 dB.
考慮到全地形車本身的特性,選擇德國IMC便攜式6通道采集器.IMC采集器需要供電,使用12 V鉛酸蓄電池進行供電.因需要測量手把處、座位處兩個接觸點的3個方向的振動加速度信息以及腳踏處一個接觸點的單個方向振動加速度信息,共需要7個數據采集通道,而單個便攜式IMC采集器只有6個通道,試驗時將兩臺便攜式IMC設備并聯在一起使用.IMC采集器可將試驗數據實時存儲到采集器的CF卡上,試驗完成后可將試驗數據拷貝到計算機硬盤中,用軟件分析系統進行后處理.
1.2 硬件系統設計
根據ISO 2631,ISO 5349等國際標準的要求,座位處、手把處、腳踏處傳感器所測量的數據均是在指定的勻速條件下測量.受試驗場地和采集時間的限制,需要專業試車員來控制數據開始采集的時間,而采集器沒有這一功能.利用便攜式IMC采集器數字輸入模塊以及其內置的恒流源,再配備一個普通開關,即可設計采集外觸發模塊.
采集外觸發模塊的設計如圖1所示,選用一臺便攜式IMC采集器的DIN_Bit01作為觸發源,在DSUB-PLUG數字盒內的BIT_01端和LCOM端連接一個節點開關.然后在采集器中設置觸發采集的條件.這里選擇高電平時開始觸發采集,即完成采集外觸發模塊的設計.采集結束則由采集器中設置的采集時間長短來決定.
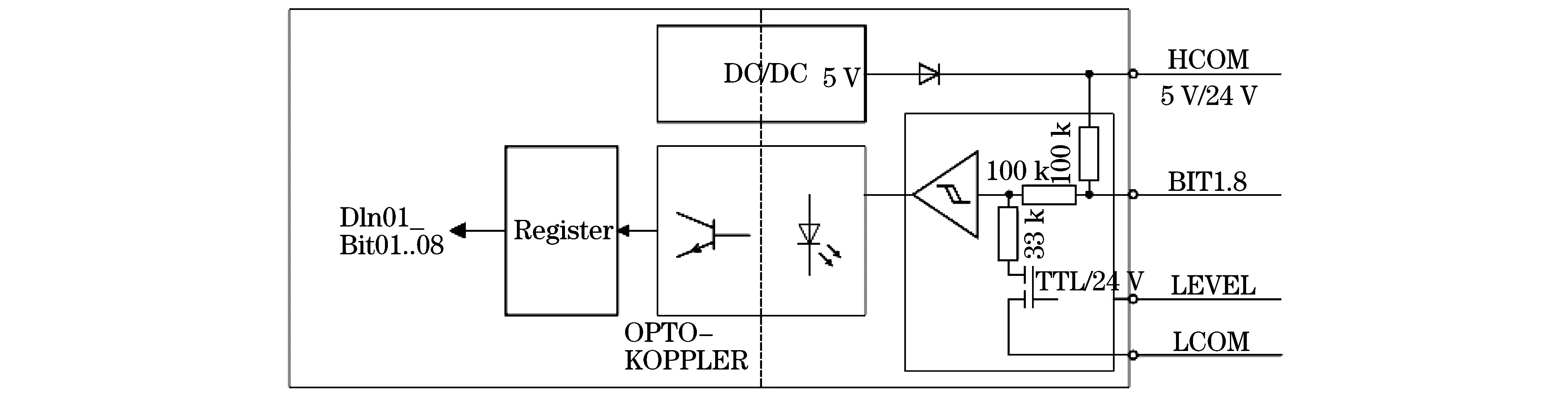
圖1 采集外觸發電路圖Fig.1 Circuit diagram of external triggering
2 軟件分析系統設計
FAMOS是德國IMC采集器配套的編程軟件,能完成數據處理分析和信號處理.為了避免數據格式的轉換,采用FAMOS作為后處理軟件開發平臺,設計了與硬件測試系統匹配的全地形車平順性軟件分析系統.
設計軟件分析系統的核心是全地形車平順性評價方法的實現,包括時域法和頻域法.
頻域法進行功率譜計算時,可以采用經典譜估計和現代譜估計.這里,選擇Welch法代表經典譜估計,選擇AR模型法代表現代譜估計[9].
2.1 時域法實現
對記錄的振動加速度時間歷程a(t),通過相應
的頻率加權函數的濾波網絡得到振動加權加速度時間歷程aw(t),計算振動加權加速度均方根值為
(1)
式中:T為振動的分析時間,要求不少于1 min.
計算手把處振動加權加速度均方根值的頻率加權函數wh對應的濾波器的頻響函數為

(2)
式中:s為拉譜拉斯變換中的復變量;f1,f2,f3,f4,Q1,Q2為加權系數,計算wh時取值分別為6.311,258.9,15.915,15.915,0.71,0.64.
計算座位處垂直振動加權加速度均方根值的頻率加權函數wk對應的濾波器的頻響函數為
(3)
式中:f1,f2,f3,f4,f5,f6,Q1,Q2,Q3為加權系數,計算Wk時取值分別為0.4,100,12.5,12.5,2.37,3.35,0.63,0.91,0.91.
計算座位處水平振動加權加速度均方根值的振動的頻率加權函數wd對應的濾波器的頻響函數為
(4)
式中:f1,f2,f3,f4,Q1為加權系數,計算wd時取值分別為0.4,100,2.0,2.0.
2.2 頻域法實現
對記錄的振動加速度時間歷程a(t)進行頻譜分析得到功率譜密度函數Ga(f),計算1/3倍頻帶振動加速度均方根譜值為
(5)
式中:ai為中心頻率為fci的第i個1/3倍頻帶加速度均方根值,m/s2;fui,fli分別是1/3倍頻帶的中心頻率為fci的上下限頻率,Hz;Ga(f)為加速度自功率譜密度函數,m/s3.
計算單軸向振動加權加速度均方根值為
(6)
式中:wi為第i個1/3倍頻帶的加權系數;aw為單軸向加權加速度均方根值,m/s2.
考慮到數據處理的精度要求,采用頻率法進行數據處理時,把試驗數據按順序分為12個獨立樣本,并且按照50%重疊進行,加漢寧窗.
以上時域法和頻域法計算出了單軸向加權加速度均方根值,按照ISO 2631,ISO 5349國際標準,各軸向加權系數均為1,因此,三軸向總加權加速度均方根值為
(7)
全地形車的平順性評價采用加權振級更利于比較,因此將加權加速度均方根值換算為加權振級,即
(8)
式中:a0為參考加速度均方根值,a0=10-6m/s2.
軟件分析系統設計中,遵循模塊化程序設計思想,根據系統的總體需求,軟件系統的框圖如圖2所示.
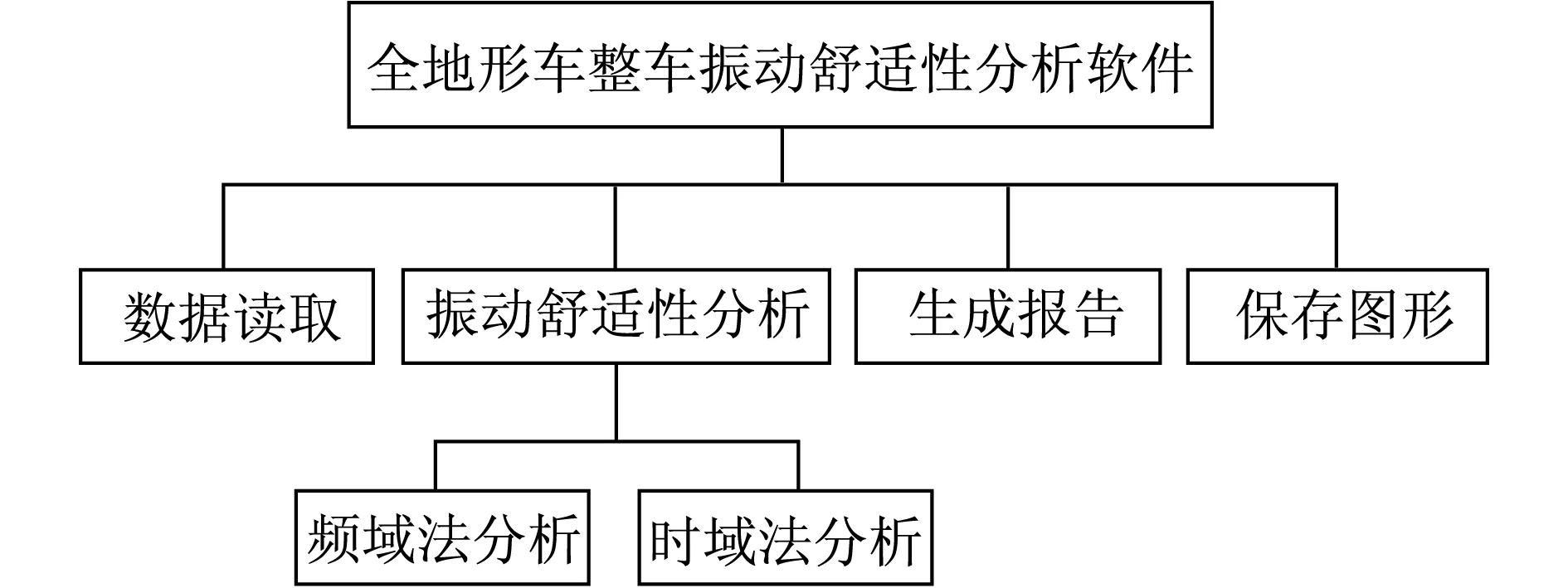
圖2 平順性分析軟件的框圖Fig.2 Scheme of the analyzing software for riding comfort analysis
目前,全地形車的平順性分析大多采用頻域法,而忽略時域法[10-11].本文設計的軟件分析系統包括時域法和頻率法,以便更好地進行分析與評價.
3 全地形車平順性測試系統應用
本文采用搭建的全地形車平順性測試系統,對多款全地形車進行了平順性分析,結合多名駕駛員的主觀評價,結果表明:測試系統方便、可靠.這里僅以某款全地形車為例進行平順性測試分析.
平順性試驗在國內某機場進行,B級路面.試驗時天氣晴朗,溫度30 ℃左右,風速小于3 m/s,所試驗的全地形車運行狀況符合試驗要求,專職試車員體重75 kg,滿足要求.按照平順性試驗要求,車速分別為30,40,50,60和70 km/h.
考慮到軟件分析系統處理精度的要求,試驗時設置采樣頻率為2 000 Hz,采樣時間為1 min,滿足要求.
平順性試驗之前,采用高精度GPS對車速進行校正.試驗過程中,專職試車員觀察校正后的車速表,當達到指定車速后,通過設計的采集外觸發開關控制數據采集,并保持穩速行駛,直至通過指定的距離.
采用開發的軟件分析系統,對試驗數據進行處理.由于采用時域法評價人體振動時需對峰值因子進行判斷,提取了5個車速下時域法分析時的峰值因子,均小于6,評價方法可行.
該全地形車平順性評價最終的結果如表1所示,包含時域法和頻率法的評價結果.頻率法中有代表經典譜估計Welch法和現代譜估計AR法的分析結果.
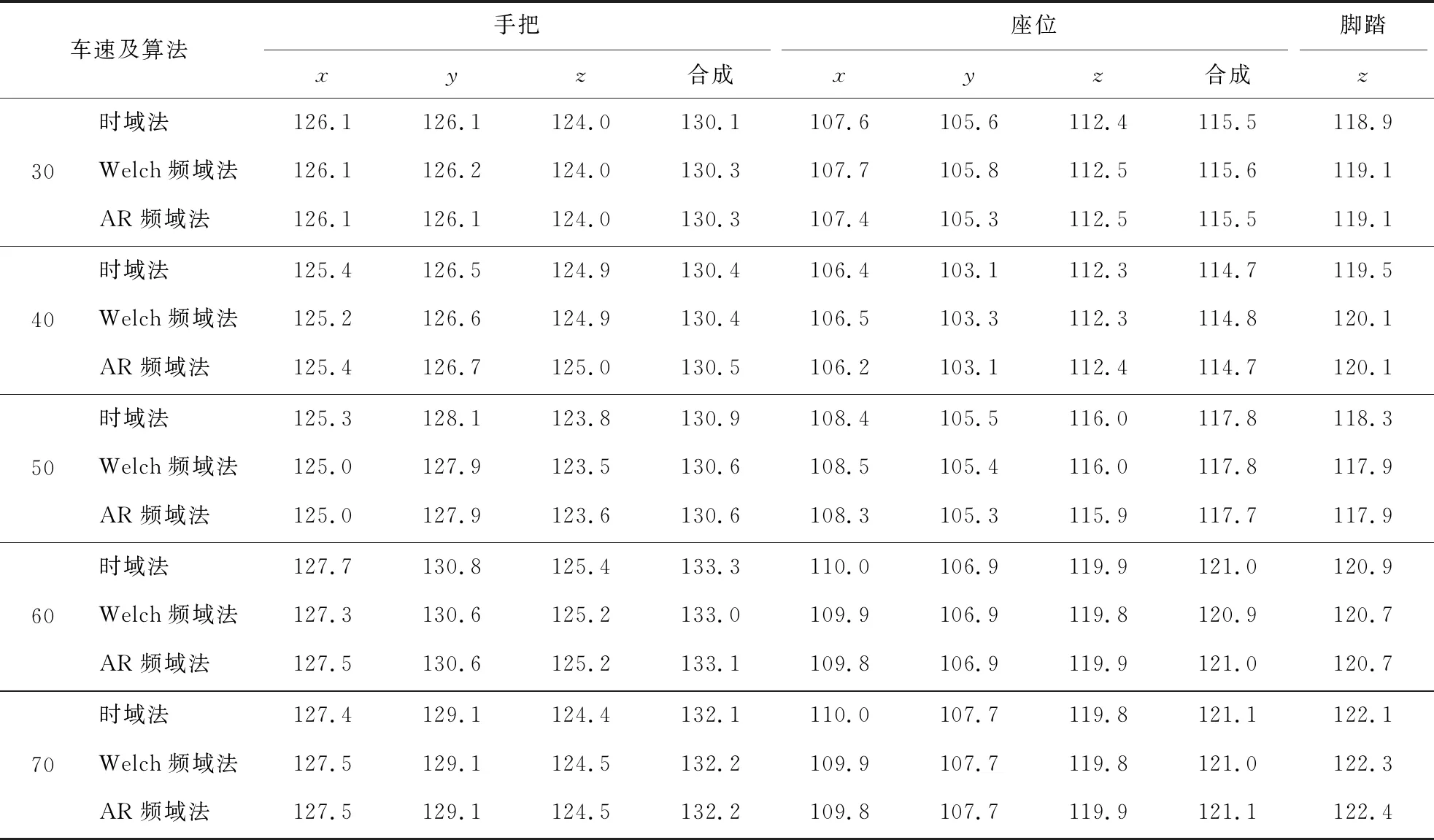
表1 手把、座位及腳踏振動評價結果Tab.1 Vibration evaluation results of hands,cushions and pedals
由表1可知:評價人體振動時,時域法、Welch頻域法和AR頻域法3種方法所計算的結果相差非常小,并且評價結果與專業試車員的主觀評價一致.這表明3種方法均可用于全地形車平順性的評價.
在實際數據處理時,發現時域法計算速度遠比頻率法快,推薦使用時域法計算最終評價結果.
在頻率法分析全地形車平順性時,有代表經典譜估計Welch法和現代譜估計AR法.這里以50 km/h時車速為例,給出手把處Z向采用Welch法和AR法所得到的功率譜密度圖,如圖3所示.
由圖3可知:Welch法和AR法的功率譜密度趨勢及幅值一致,但AR法比Welch法所得的曲線光滑,更易于分析頻譜特性,了解全地形車的振動特性,為后期改進提供理論指導.
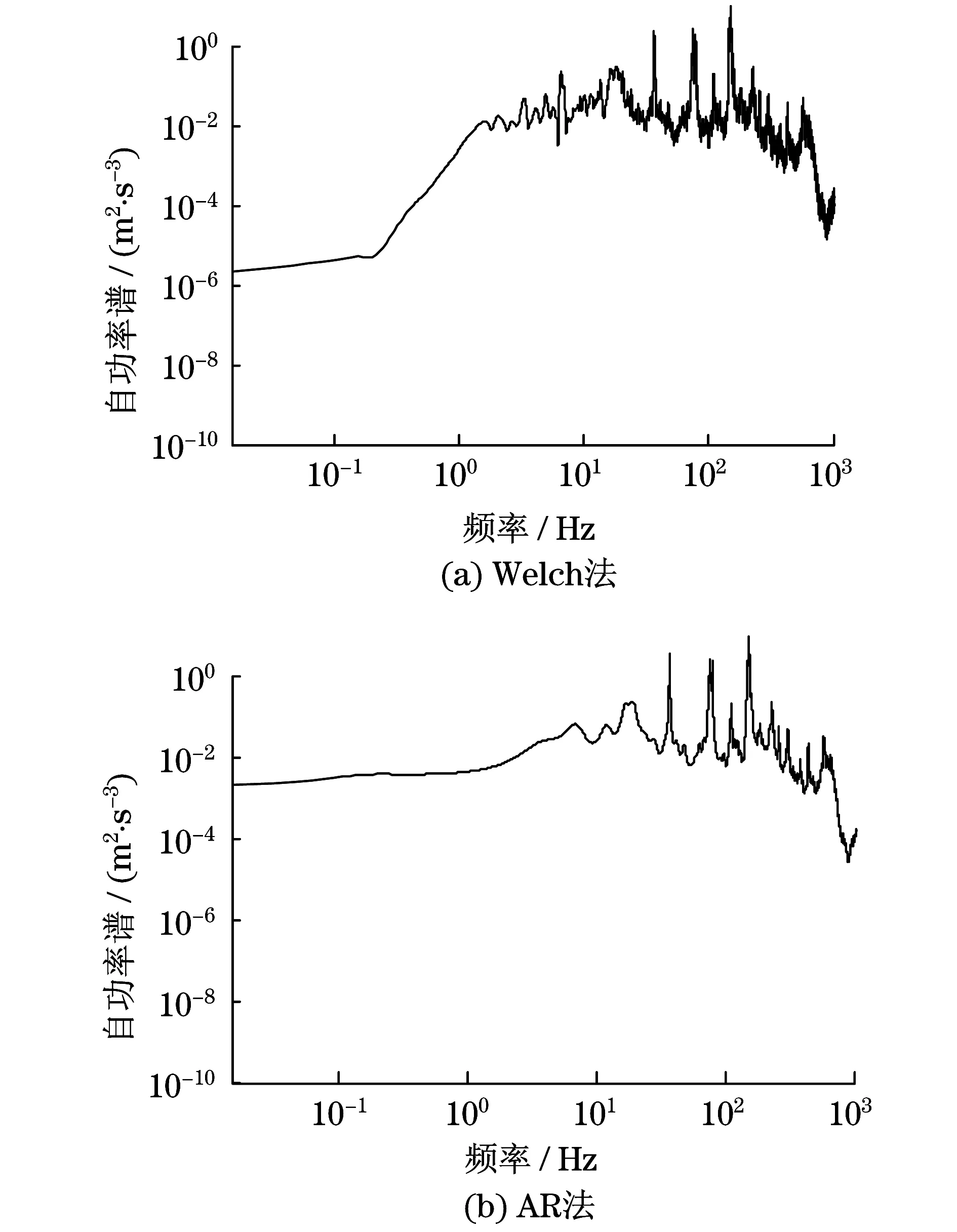
圖3 50 km/h手把處Z向功率譜密度Fig.3 Power spectral density of Z-direction at the hand for 50 km/h
4 結論
(1) 參考ISO 2631,ISO 5349等標準,結合全地形車自身振動特性,開發了適合于全地形車平順性評價測試硬件系統.考慮到與硬件測試系統的匹配性,在FAMOS環境下設計了軟件分析系統,最終搭建了完整的全地形車平順性測試系統,該測試系統可靠且方便.
(2) 利用搭建的全地形車振動測試系統,以某款全地形車為例,進行了平順性評價.結果表明:時域法和頻率法的定量評價結果極度吻合,都可以用于全地形車的平順性評價.
(3) 代表經典譜估計的Welch法和現代譜估計的AR法所得到的功率譜曲線趨勢一致,但AR法所得到的功率譜曲線光滑,更利于分析.
(4) 時域法計算速度快,可很快了解被測全地形車的平順性狀況,但無頻域分析結果.頻率法計算速度慢,保留了功率譜圖,可用于全地形車平順性的改進分析.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
計算物理(2014年2期)2014-03-11 17:01:44