纜道式雷達波自動測流系統在喀麥隆曼維萊水電站中的應用
2019-07-31 03:09:02張培甫羅碧喜
水利水電工程設計 2019年2期
關鍵詞:系統
張培甫 羅碧喜
曼維萊水電站水文站位于廠房尾水下游,地處恩特姆峽谷地帶,兩岸覆蓋著濃密的原始叢林。該流域面積為26 350 km2,整個流域地形較為平坦,上游支流眾多,多為平坦的沼澤地。流域地形可以分成兩部分,從尼亞貝桑上游50 km的瑪安到河源地形較緩,平均比降為1/1 800,從瑪安到河口地形較陡,平均比降為1/300。該流域及附近前期有12個雨量站、5個氣象站和2個水位站,水文資料較少,為滿足電站安全建設對實時水文資料的需求,水文站建設迫在眉睫。
1 纜道式雷達波自動測流系統原理
纜道式雷達波自動測流系統的建設目標首先是要在測流斷面上設定若干條實測垂線,利用纜道系統自動將雷達波測速探頭布設在這些垂線上方實測水面流速,然后將采集到的垂線水面流速數據通過無線方式發送到流量計算設備(如測流計算機)中,流量計算設備根據水面流速系數計算出代表垂線的平均流速,再利用率定的雷達波實測水面流速與人工實測垂線平均流速的關系模型,計算出垂線平均流速。系統同時采集當前水位,通過水位面積關系得到過水面積,從而實現河道流量的實時在線監測,并按照水文資料整編要求輸出成果。該系統可實現對纜道和測流設備的自動控制,水文數據信息的自動分析處理和傳輸;可將水位、垂線流速、工況參數、報警信息和其它水文參數實時遠程傳送到中心站,從而將該水文站建成全自動無人值守水位、流量實時在線監測遙測站。
2 測流斷面選擇
測流斷面的初步選擇原則是河段順直、穩定,水流集中,無分流岔流、斜流、回水、死水等。順直河段的長度應大于洪水時主河槽寬度的3倍以上。測流斷面要求上下游比降大,水面波紋規整。河段內無巨大石塊阻水,無巨大漩渦、亂流等現象,基于上述要求及現場實際情況擬在WSD8設置為測流斷面。
3 垂線布設
測流斷面上測速垂線的選擇原則主要是考慮測速垂線布設在中泓位置,不影響航運,其垂線水面流速與垂線平均流速關系好。測流斷面的選擇原則是在不同水位下盡量減少中泓的擺動。“根據河流測驗規范,探測的測深垂線數目,應能滿足掌握水道斷面形狀的要求。”及現場斷面實際情況,布設4條垂線。起點距位置為40、55、70、80 m。
4 儀器安裝
雷達波測速探頭等主要儀器安裝采用纜道懸吊測流設備方式。安裝結構如圖1所示。雷達波測速探頭安裝在不銹鋼野外機箱底部,野外機箱利用4個滑輪懸掛在2根主導軌鋼絲繩上,采用循回牽引鋼絲繩直接牽引,以控制雷達波測速探頭移動到所測垂線上方。纜道鋼絲繩通過5組導向輪控制連接,直流電機通過減速器直接連接到機箱上的驅動輪上。通過對直流電機正反轉的控制,實現雷達波測速探頭的前后移動。驅動輪轉軸上安裝光柵編碼器,通過對光柵編碼器輸出脈沖的采集,計算驅動輪轉數,從而計算出雷達波測速探頭的前進(后退)距離,控制雷達波測速探頭達到設定的測速垂線上方。
考慮到野外工作環境條件的制約(需防風、防雨、防潮、防銹、防曬、防蚊蟲進入和通風散熱),野外機箱采用不銹鋼材料,設計成扁平廠房狀,便于設備的安放和維護,內部空間以能安放需要的設備為條件,預留配重物安放位置,箱體體積要盡量小。為避免強風造成雷達波測速探頭測量角度的變化產生的測量誤差,在野外機箱內部安裝傾斜計,系統控制器在雷達波測速探頭測量前先測量傾斜角度,當發現傾斜角度超過設定值后,暫緩該次測量,等角度恢復到小于設定值后,再進行流量測驗。
野外機箱內部的設備供電和數據通信采用無線連接方式,系統控制器直接用無線電臺連接雷達波測速探頭。雷達波測速探頭的供電采用機箱上的太陽能電池板和內部安裝的蓄電池。
雷達波測速探頭安裝在不銹鋼材料的安裝罩上,安裝結構圖如圖2所示。安裝罩斜面與水平方向成58°的傾斜角度(基于聲學多普勒測量的最佳測量角度)。安裝罩頂部翻邊為橫板,安裝罩的橫板架擱在野外機箱的底部板上。雷達波測速探頭采用螺釘安裝在安裝罩上,這樣雷達波測速探頭和野外機箱連接為一個整體,且拆卸檢修方便。
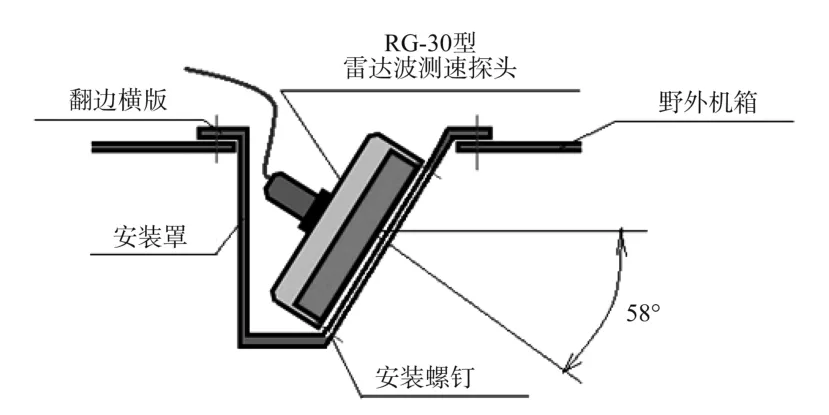
圖2 雷達波測速探頭安裝結構圖
雷達波測速探頭內置有角度傳感器,可實際測量傾斜角度,即使野外機箱在實際運行過程中有一定的偏斜角度,雷達測速探頭也可以按傾斜的角度自動修正實測水面流速數據。
5 測設方式
纜道式雷達波自動測流系統采用無人值守模式,當需要測流時,系統控制器給直流電機上電,將雷達波測速探頭開出移動到第1條垂線位置上方,然后通過電臺給雷達波測速探頭發送啟動工作指令,雷達波測速探頭收到指令后,開始進行水面流速測驗,當完成第1條垂線水面流速測驗后,系統控制器啟動直流電機將雷達波測速探頭開出移動到第2條垂線位置上方,并啟動雷達測速探頭開始進行第2條垂線水面流速測驗。如此重復完成指定所有垂線水面流速的測驗后,系統控制器記錄當前雷達測速探頭停止位置并給直流電機斷電,然后將實測出的各條垂線水面流速數據和當前水位通過無線通訊模塊發送到中心站,中心站流量計算設備接收到各條垂線的水面流速數據后,根據率定的垂線水面流速關系(0.855)計算出斷面平均流速,根據實測的水位數據計算過水面積,從而實現流量的實時測驗。系統控制器同時將遙測站蓄電池電壓等工況信息一并發送到中心站。
完成一次系統測流后,雷達車會停留在最后一個斷面處。當開始下一次測流后,雷達車會進行復位,修正雷達波測速探頭的當前起點距位置,從而消除移動所產生的的累計誤差。
根據實際水位情況,還可靈活修改測量模式,包括每日施測次數、施測時間等。主要分為常規定時施測模式;水位上漲超高模式;上漲超過高水設定值加密施測模式;臨時手動加測模式。當洪水水位超過設定的警戒值,測站的通訊設備自動開機,接收中心水文站的遠程召測;水位低于設定的警戒值后通訊設備自動關機,恢復定時通訊機制。強風停測模式,當室外風速較大,雷達波測速探頭傾斜角度超過設定角度后,系統控制器停止水面流速測驗;當風速較小,雷達波測速探頭傾斜角度小于設定角度值后,系統控制器恢復雷達波測速探頭正常工作。低水位停測模式:當水位低于設定的停測水位值后,系統控制器停止測流系統運行。當水位高于設定的停測水位值后,再恢復為常規定時施測模式;流量的測量模式參數設置在系統控制箱內部存儲芯片上,可根據需要任意修改。
6 成果輸出
流量的算法仍然采用傳統的流速面積法。計算機是通過通訊模塊收集實時垂線流速分布數據和水位數據,計算實時斷面流速和流量,測流軟件具有日/月流量、水位過程線和報表等功能。
中心站計算機接收到系統控制器發送的信息后會自動進行數據解析計算,并進行資料整編形成報表,方便用戶使用,不用再進行繁瑣的數據采集以及數據統計與計算。中心站軟件不但有數據信息的直接反饋,還有過程線統計圖的直觀顯示,操作簡單方便,還能對信息數據源進行修改并保存用戶需要統計與計算的新數據以及斷面垂線分布、工作參數、岸邊系數、天氣參數、儀表參數、站點信息的設置修改與保存。
此軟件還提供了查詢功能,可對解析數據通過折線圖的圖表形式更加直觀地了解水位流量變化信息,用戶還可以對數據進行編輯與保存。
中心站計算機可以根據接收到的工況信息,生成施工日志格式文件。用戶可以隨時查詢水文站工作情況。
7 結語
喀麥隆曼維萊尾水水文站無線纜道式雷達波自動測流系統的建設應用,使得在一些極端環境下傳統方法無法實現的流量測驗成為了可能,極大地補充了傳統流量測量方法的空白。實現了全自動無人值守水位流量實時在線監測,對于解決陡漲陡落山區性河流高洪流量測驗的危險性大、勞動強度高等問題具有重要借鑒意義,可在相關水文站建設中推廣應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
