寬帶聲學多普勒計程儀性能試驗分析
2019-07-22 00:19:22林伊凡陳夢英景永剛劉宇
聲學技術 2019年3期
林伊凡,陳夢英,景永剛,劉宇
寬帶聲學多普勒計程儀性能試驗分析
林伊凡1,陳夢英2,景永剛2,劉宇2
(1. 海軍裝備部駐上海地區第七軍事代表室,上海 201108;2. 中國科學院聲學研究所東海研究站,上海 201815)
寬帶聲學多普勒計程儀與窄帶聲學多普勒計程儀相比,具有更高的測速精度和更廣泛的應用價值。其中寬帶信號的編碼形式是提升寬帶多普勒計程儀性能的重要因素。文章利用寬帶測速的標準差公式分析了寬帶多普勒測速精度的誤差來源,提出了采用差分全球定位系統(Differential Global Positioning System, DGPS)和iXSEA公司的Octans光纖羅經組合測速參考系統進行測速精度考核的試驗方法,分別對63、31和15階(即碼元數)的三種m碼形式的編碼序列脈沖,在高航速和低航速下,進行了對地和對水的測速考核試驗以及數據分析。試驗結果表明,寬帶聲學多普勒計程儀具有比傳統計程儀測速精度高、穩定性好的特點。文章為寬帶多普勒計程儀在實際應用中的參數選擇提供了重要的試驗依據。
多普勒測速;寬帶編碼;多普勒計程儀考核
0 引言
寬帶聲學多普勒計程儀(Doppler Velocity Log, DVL)是根據多普勒效應原理設計的一種高精度的測速和計程儀器[1]。它以測速精度高,可測量艦船和水下潛器的絕對速度等特點得到了廣泛應用。傳統的聲學多普勒計程儀均采用窄帶信號,缺點是受頻率和脈寬的限制,作用距離和測速精度相互制約,單次測量偏差較大。隨著寬帶編碼技術的引入,DVL有了更進一步的發展,與窄帶單頻信號相比,寬帶編碼信號單次測量方差小,有較高的測速精度,并具有較強的抗干擾能力[2-3]。由于寬帶編碼信號的編碼形式與參數選擇至關重要,當前國內外各研究機構使用的編碼均未公開。為了進一步深入研究該項技術,本文首先利用寬帶測速的標準差公式分析了編碼形式與參數選擇對DVL測速性能的影響,給出了測速精度考核的試驗方案,通過改變寬帶編碼形式與系統參數,對DVL測速精度進行了試驗研究與分析。
1 寬帶多普勒計程儀理論
DVL作為水下組合導航系統的重要組成部分,可提供艦船對底絕對速度,在超出工作深度范圍的情況下,可轉為對水測速,給出艦船的對水速度,這樣能夠保證定期地對慣導系統進行校對和對慣導的漂移進行補償,使組合導航系統具有長時間高精度定位的能力。從原理上說,DVL是通過聲學換能器發送一個由二進制偽隨機相位編碼調制的正弦脈沖信號后,并接收來自海底反射或對水散射的回波信號。根據聲學換能器發射信號頻率和接收信號頻率之差,即多普勒頻移,計算出設備對海底或對水層的速度值[4]。本文著重分析了DVL對底測速和對水測速精度。
(1) 碼元類型選擇
m序列碼作為最大長度線性移存器序列,具有循環周期性、偽隨機性和工程上易于實現的特點,因此,本系統采用m序列碼作為系統的發射信號形式[5]。
(2) 寬帶多普勒測頻算法
DVL 一般采用脈沖對測頻算法(Complex Covariance Power Spectral Moment Estimates of Correlated Pairs, CPPC)估計多普勒頻移。


其自相關函數可表示為
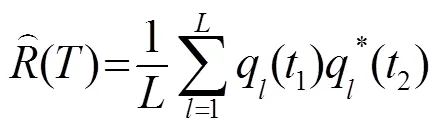
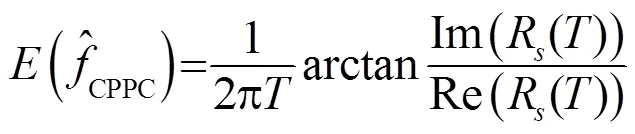
由于功率譜是自相關函數的傅里葉變換,通過估計功率譜的一階矩可以得到回波信號的平均頻率。用CPPC測頻算法估計功率譜的一階矩公式如式(3)所示:
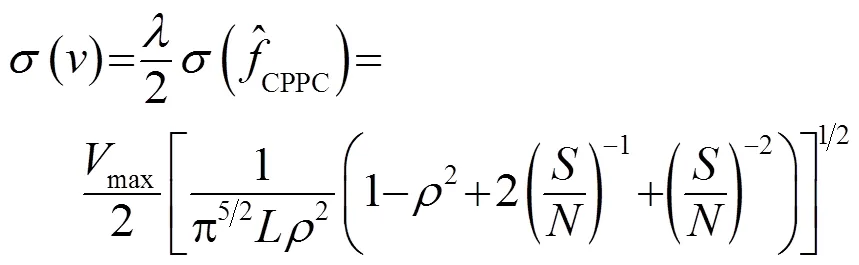
(3) 寬帶多普勒測速精度誤差來源
根據速度與頻率之間的關系,通過分析寬帶信號的相關函數,可推導出寬帶測速的標準差[6]:
2 測速精度考核試驗方法
為了驗證DVL寬帶信號編碼的測速性能,考核試驗盡量選在開闊無船、無風無浪的水域進行。
試驗方法如下:利用專用的精度考核處理機實時記錄DVL所輸出的縱向對底(或對水)與橫向對底(或對水)速度,NAVCOM公司SF3050高精度DGPS所輸出的位置坐標和時間,以及iXsea公司的高精度平臺羅經Octans所輸出的航向數據,分析DVL的測速誤差。為了抵消水流的影響,航船采用順流、逆流、順流的方式測量多組數據,然后進行處理。假設水流速度的真值為零,將DGPS得到的測速結果作為載體對底(或對水)速度的真值,DVL分別工作在對底及對水測速模式,實時測量高速、低速勻速直航情況下的對底(對水)速度,試驗船最大航向偏差應不超過±1°,直線航程不小于1海里(1.852 km)。試驗框圖如圖1所示。DVL、DGPS和Octans均通過串口與DVL精度考核處理機通信,航向指示器接收航向數據,用于指示試驗船只的航向,便于試驗船直線航行[7-8]。
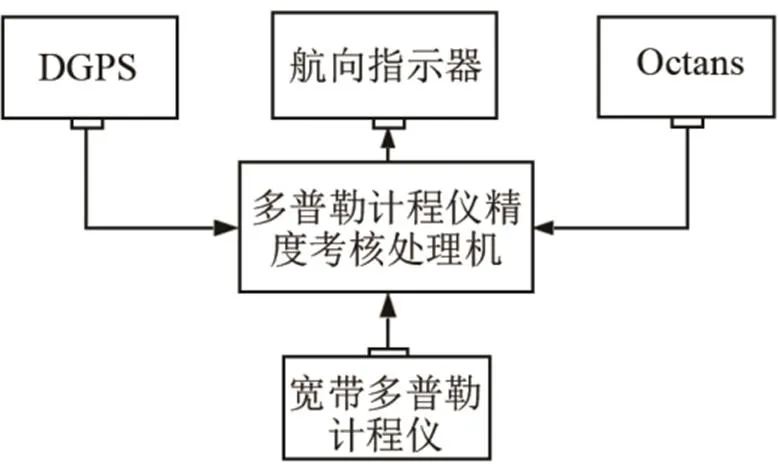
圖1 DVL測速精度考核試驗框圖
3 試驗數據處理與分析
2018年8月在某試驗場進行了600 kHz DVL的測速精度標定試驗。該水域的深度約為60 m,湖面開闊,無風浪。DVL一般具有對底測速和對水測速兩種功能,針對這兩種功能,對不同編碼的寬帶信號在不同航速進行了測試試驗。
DVL對底和對水測速時在發射脈寬的選擇上有所區別。對水測速利用短的發射脈沖來獲得垂直分辨率,而對底測速需要長脈沖。長脈沖可將波束全部透射到底部。在工程上,對底測速的發射脈寬一般采用經驗公式[1]:
本系統參數如下:換能器為相控陣,形成4個波束。系統中心頻率為600 kHz,帶寬為200 kHz,波束開角為1.8°,波束與垂向的夾角為30°。
3.1 寬帶編碼對底測速性能考核試驗
3.1.1 15階m序列碼對底測速結果
試驗水域水深約60 m,試驗船航速約10.2 kn,勻速直航1海里(1.852 km)。根據水深與船速,選擇發射信號為15階m序列脈沖對,發射信號長度為20 ms,每個碼元內填充4個周期的600 kHz正弦信號,因此,每個發射信號長度內碼元的個數為96。每個航程的真實航速以GPS和Octans組合系統的實測值為基準,將DVL的測速結果與其對比,進行性能考核。
圖2為15階m序列DVL測速值與實時GPS測速值的對比圖,其中V-GPS表示GPS測量的船艏方向的瞬時縱向速度值,V-GPS表示GPS測量的瞬時橫向速度值,V-DVL表示DVL測量的船艏方向的瞬時縱向速度值,V-DVL表示DVL測量的瞬時橫向速度值。從圖2中可以看出,試驗船實際航行時無法達到絕對的勻速直航,本航次的橫向速度存在約0.1 kn的波動。計程儀測量的對底船速結果和GPS測量值基本吻合。
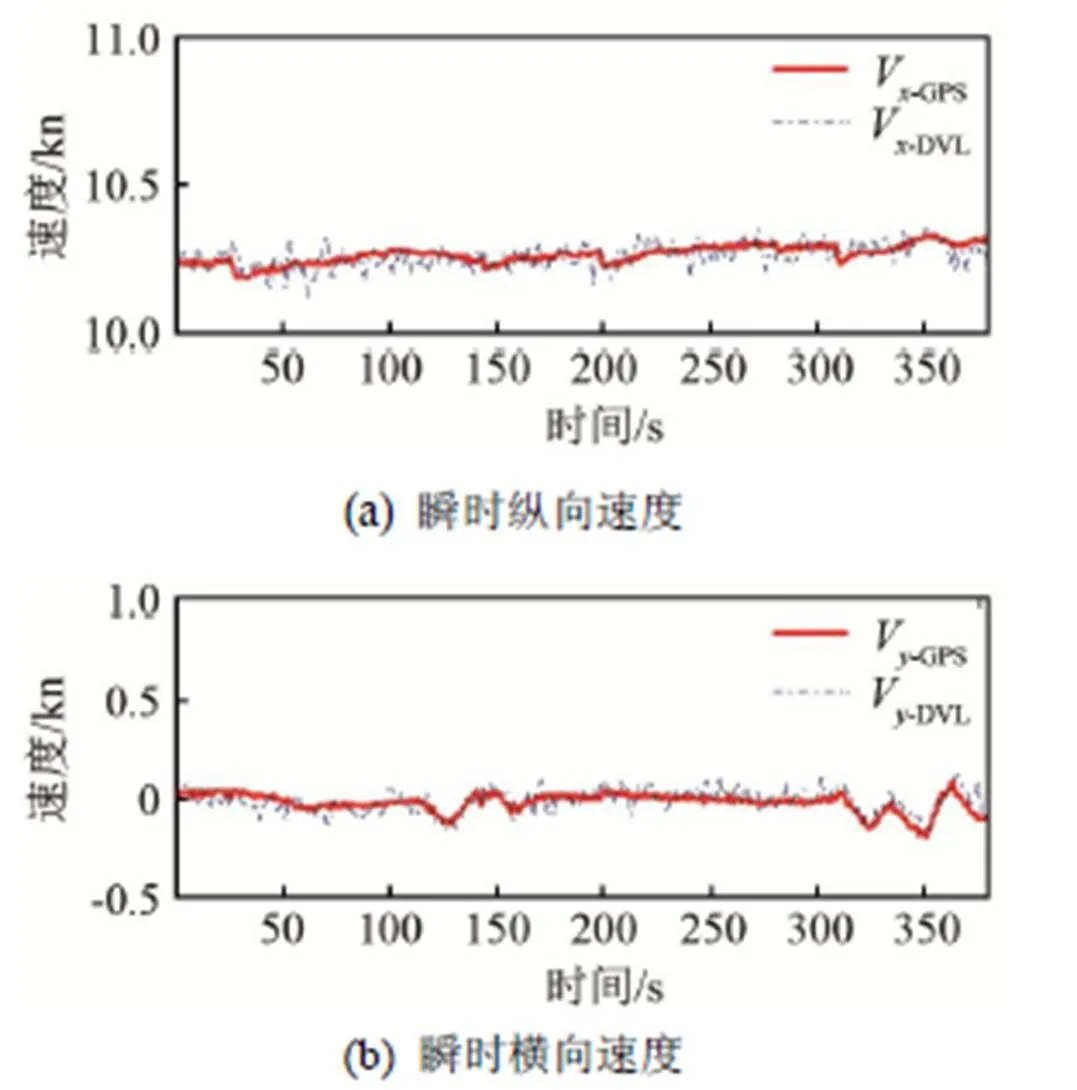
圖2 15階m編碼對底測速考核結果
3.1.2 31階m序列對底測速結果
信號編碼采用31階m序列脈沖對,信號長度為20 ms,每個碼元內填充4個周期的600 kHz正弦信號,每個發射信號長度內的碼元個數為48。本航次試驗船航速約10 kn,勻速直航1海里(1.852 km)。
圖3為31階m序列編碼DVL對底測速值與實時GPS對底測速的對比圖。與圖2比較可知,編碼越長,測量值波動越小,所測速度的標準誤差越小,測速精度越高。
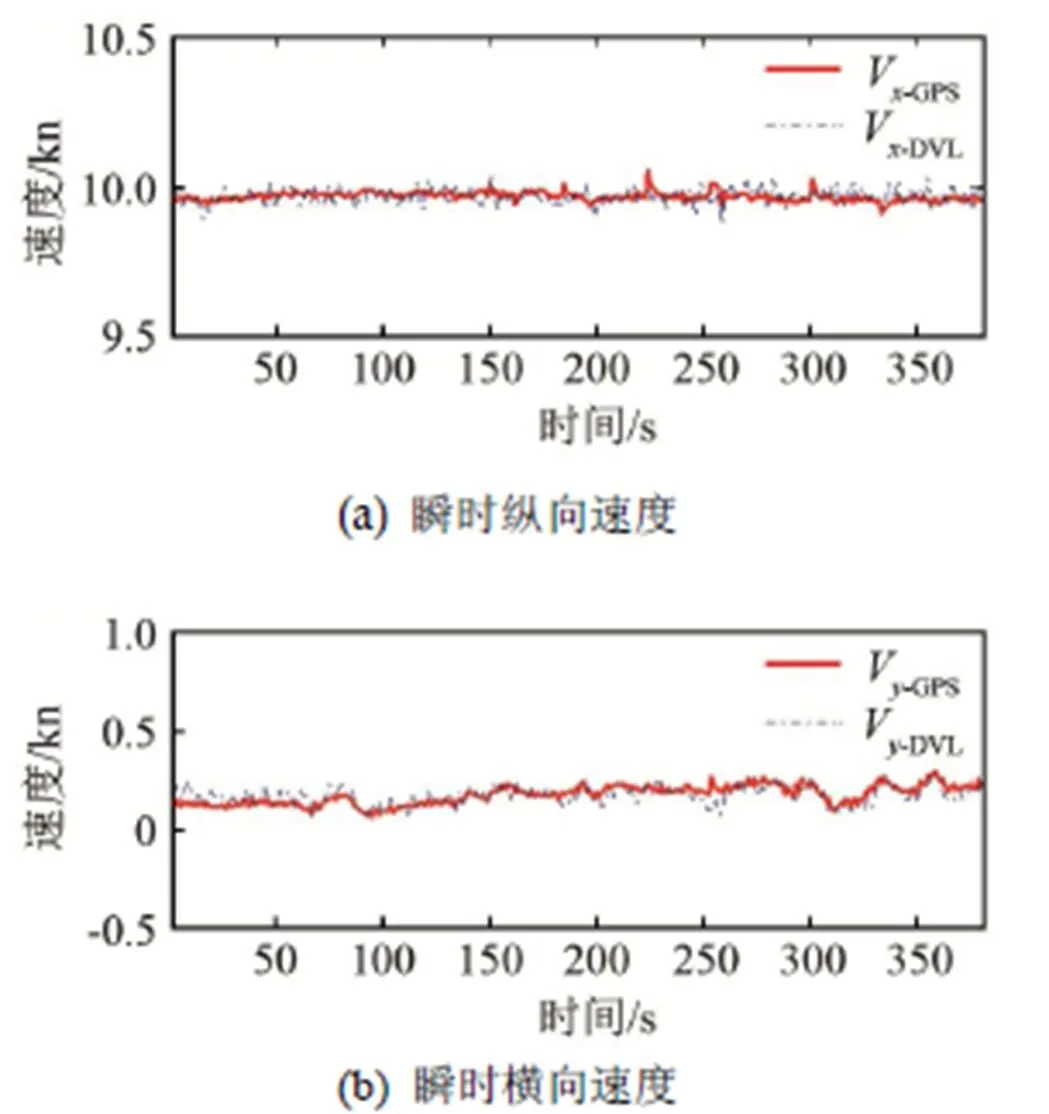
圖3 31階m序列對底測速考核結果
3.1.3 編碼長度對底測速精度的影響分析
為了進一步統計對底測速精度,分別進行了6 kn航速下,63階m序列碼和31階m序列碼測速標定試驗,以及10 kn航速下,31階m序列碼和15階m序列碼測速標定試驗,4個航程試驗中發射信號脈寬均為20 ms。為了進一步與窄帶多普勒計程儀的性能進行對比,又分別進行了6 kn和10 kn航速下,20 ms單頻信號對底測速試驗。由于DVL輸出數據中有局外數據,可能會導致組合導航系統中的卡爾曼濾波器發散,本文采用文獻[9]中的動窗穩健平均的數據平滑方法,對DVL和GPS數據均進行8點平滑處理。表1給出了各工況下8點平滑的速度估計標準差和航程誤差。
根據多普勒計程儀的考核標準,分別從船速小于10 kn測速絕對精度、船速大于10 kn時測速相對精度以及最大航程誤差三個方面對寬帶DVL進行評價,從表1可以得出以下結論:
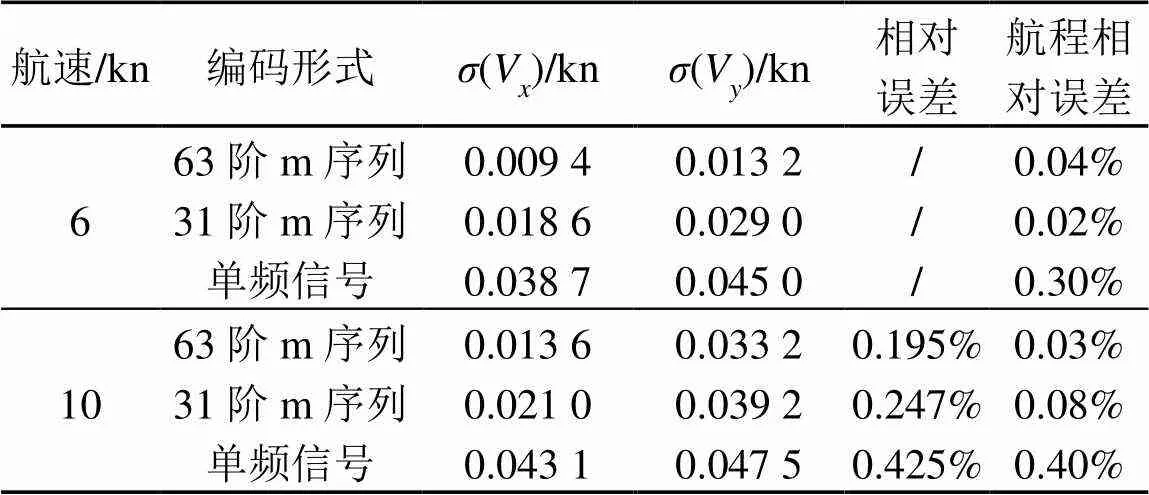
表1 編碼長度不同時的對底測速標準差
(1) 對底測速精度(8點平滑):航速<10 kn時測速精度≤0.03 kn,航速≥10 kn時,測速相對精度≤0.3%。
(2) 最大航程誤差為0.08%。
(3) 在6 kn航速下,采用63階m碼測量的縱向速度標準差為0.009 4 kn,采用31階m碼測量的縱向速度標準差為0.018 6 kn,可見編碼越長,測速精度越高。同樣,在10 kn航速下,采用31階m碼比15階m碼的測速精度高。在相同對底測速條件下,編碼長度對精度的影響較為顯著。
(4) 實驗在對底工作狀態、底深為60 m時,信噪比為35 dB。對比6 kn航速下31階m碼與10 kn航速下31階m碼的測速精度,兩者相差不大。可以看出,在信噪比為35 dB的情況下,航速對測量精度的影響不大。
(5) 與窄帶聲學多普勒計程儀相比,DVL具有測速精度高、航程誤差小的特點。
3.2 寬帶編碼對水測速性能考核試驗
3.2.1 對水測速時水層厚度對精度的影響分析
該試驗信號編碼采用63階m序列脈沖對,每個碼元填充4個周期的600 kHz正弦信號,一個發射信號長度內的脈沖對個數分別為2、4、8,對應水層厚度為1、2 m和4 m,試驗船航速約4.7 kn,勻速直航1海里(1.852 km)。
圖4為水層厚度分別為1、2 m和4 m的63階m序列DVL測速值與實時GPS測速值對比圖。從圖4中可以看出,DVL測量的對水船速和GPS測量值相吻合,同等參數下,對水測速標準差隨水層厚度的增加而降低。
為了進一步分析水層厚度對測速精度的影響,相同航速下,對63階m序列脈沖對進行了3種水層厚度的6個航次的試驗,其中每個水層厚度均進行N1和N2兩個航次的重復試驗。8點平滑的速度標準差如表2所示。從表2中可以看出,相同試驗參數下,兩個航次的測速標準差基本一致,水層厚度越大,測速精度越高,與理論相符。
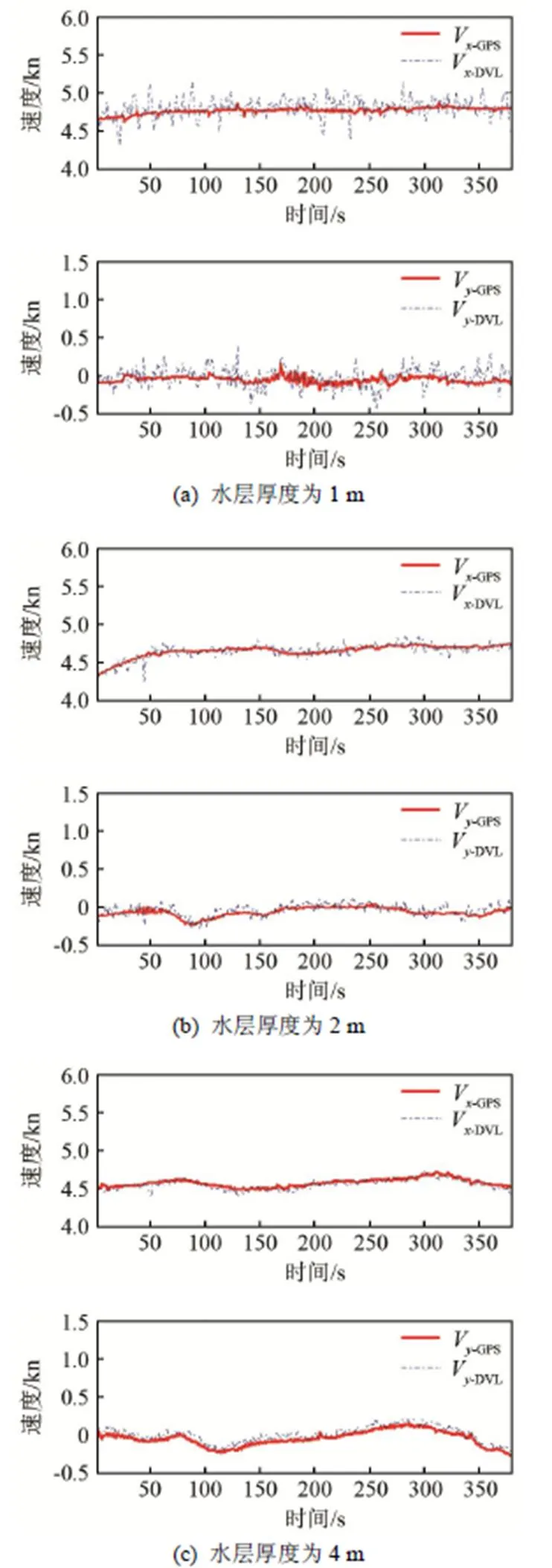
圖4 航速相同、分層厚度不同時對水測速考核結果
3.2.2 編碼長度對水測速精度的影響分析
為了驗證編碼長度對水測速精度的影響,進行了4個航次的試驗,水層厚度均選擇2 m,試驗船勻速直航,針對63階m序列碼、31階m序列碼、15階m序列碼進行了試驗研究。測速標準差結果見表3。由表3可見,在相同航速下,編碼長度越長,對水測速的精度越高;相同編碼時,航速越低,對水測速的精度越高。
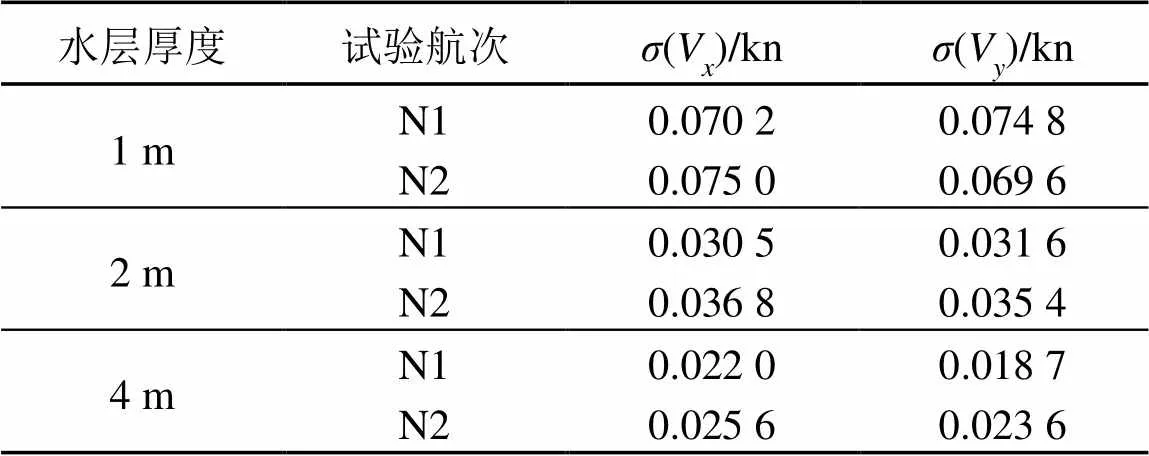
表2 水層厚度不同時的對水測速標準差
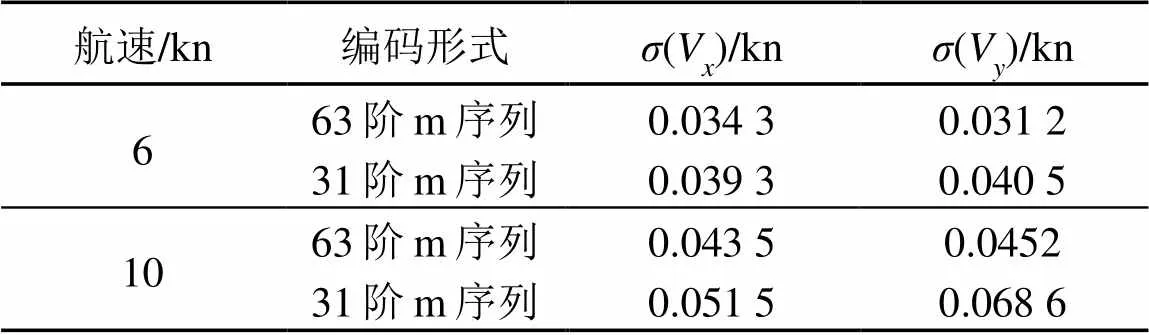
表3 編碼長度不同時的對水測速標準差
3.3 變速精度考核
上述考核中試驗船均采用勻速直航,本節分析變速考核精度。
3.3.1 對底變速精度考核
發射信號采用31階m碼,信號脈寬為20 ms,試驗船速度從10 kn減速到3 kn后再增速至10 kn,主要考核在船速變化過程中DVL對底的測速精度和航程誤差。
圖5是用DVL速度精度分析處理軟件實時處理的GPS與DVL測速對比情況,兩者均采用8點平滑。經統計,縱向速度標準差是0.046 kn,橫向速度標準差是0.029 kn,航程相對誤差累計0.02%。與相同編碼勻速測速精度相比,誤差稍有增加。
3.3.2 對水變速精度考核
發射信號采用31階m碼,水層厚度為4 m,試驗船速從10 kn減速到5 kn后再增速至10 kn,主要考核在船速變化過程中DVL對水的測速精度和航程誤差。圖6是由DVL速度精度分析處理軟件實時處理的GPS與DVL測速對比情況,兩者均采用8點平滑。經統計,橫向速度誤差是0.023 3 kn,縱向速度誤差是0.068 9 kn,與相同編碼勻速測速精度相比(表3),誤差略有增加。
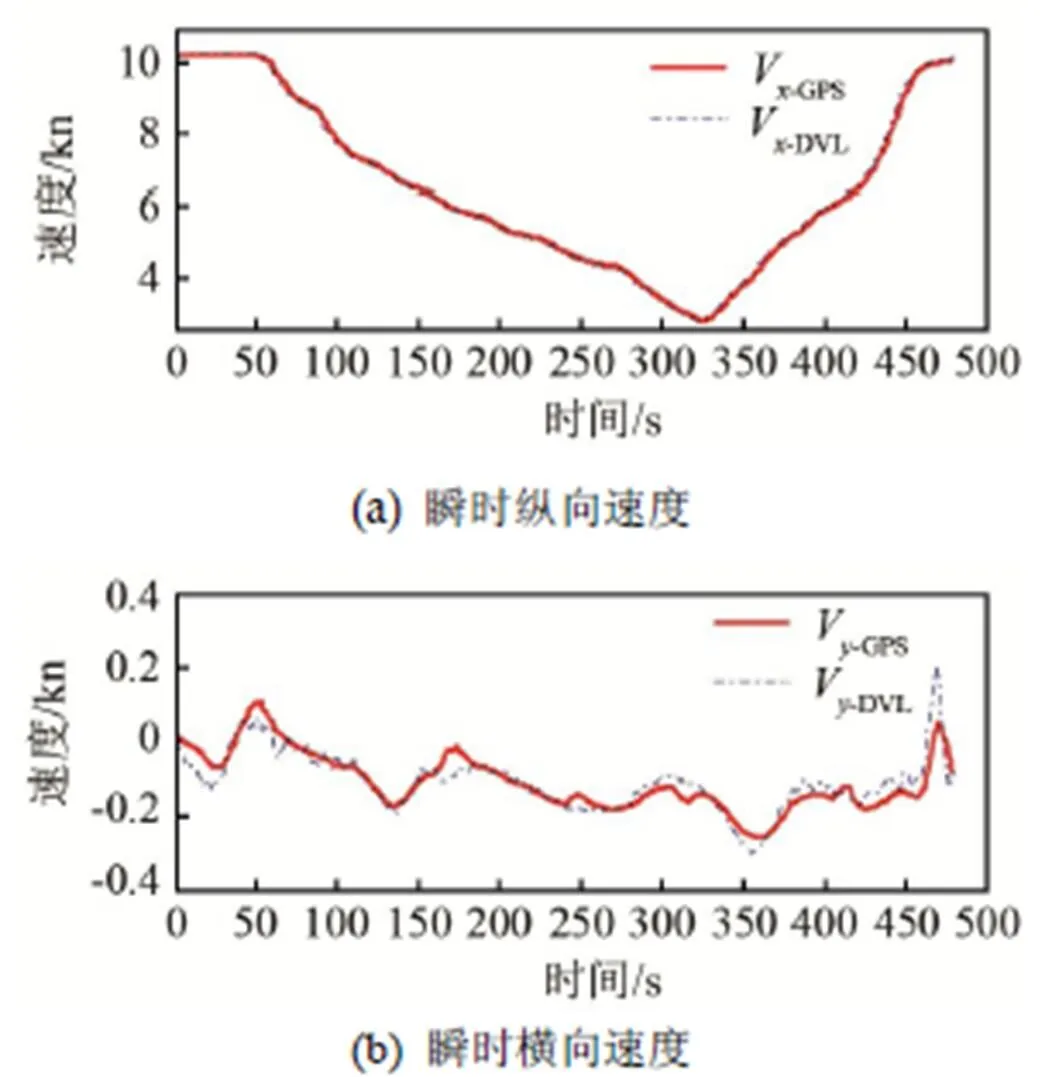
圖5 變速航行時對底測速考核結果
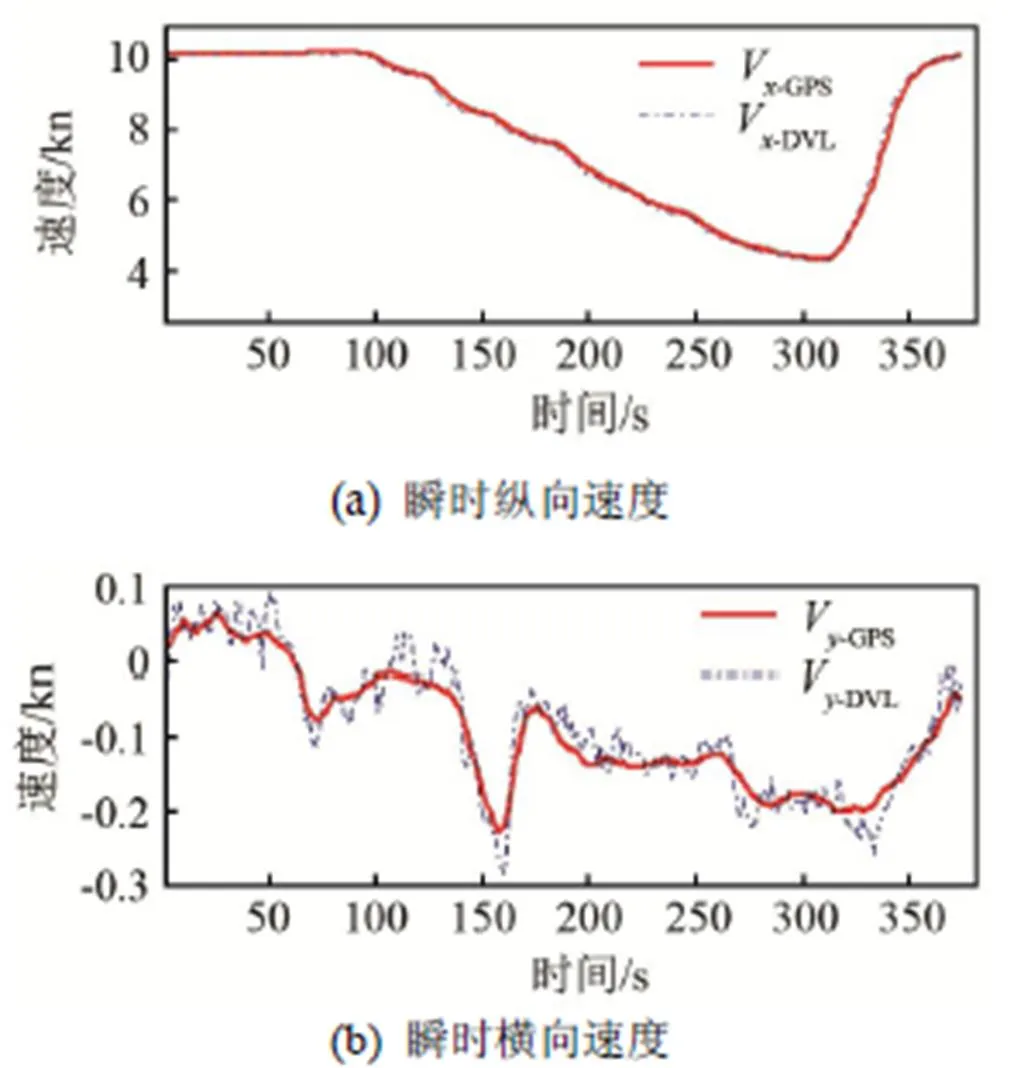
圖6 變速航行時對水測速考核結果
4 結論
本文針對600 kHz DVL的寬帶信號形式對測速精度的影響進行了詳盡的試驗研究。試驗結果表明:
(1) 相同條件下,編碼長度越長,精度越高。受模糊速度的影響,編碼長度越長,可測量載體航行速度范圍越小,實際應用中可根據載體的航行速度,選擇最優編碼。
(2) 選擇31階m碼8點平滑處理時,對底工作勻速直航速度標準差≤0.0332 kn;變速航行測速標準差≤0.046 kn。對水工作勻速直航測速標準差≤0.045 2 kn;變速航行測速標準差≤0.068 9 kn。
經試驗驗證,該系統的寬帶信號編碼具有穩定性好、精度高等特點。本文的試驗為DVL在實際工程應用中的參數選擇提供了重要試驗依據。
[1] 張占陽. 寬帶聲學多普勒計程儀測頻方法及其軟件設計[D]. 哈爾濱: 哈爾濱工程大學, 2010: 13-21.
ZHANG Zhanyang. The method of frequency measurement and software design of the broadband Doppler velocity log[D]. Harbin: Harbin Engineering University, 2010: 13-21.
[2] TRIVETT D A. Error analysis of an acoustic current meter[J]. IEEE Joural of Oceanic Engineering, 1991, 16(4): 329-337.
[3] SMITH J A, PINKEL R. Improvement of Doppler estimation through repeat-sequence coding[C]//Proc. Oceans’91, 1991: 977- 984.
[4] BRUMLEY B H, CABRERA R G, DEINES K L, et al. Performance with theoretical predictions[C]//Proceeding of Ocean Technologies and Opportunities in the Pacific for the Proceedings,1991: 991-996
[5] 汪勝波, 姬光榮, 楊光兵, 等. 寬帶聲學多普勒流速剖面儀信號中心頻率估計[J]. 中國海洋大學學報, 2013, 43(2): 87-92.
WANG Shengbo, JI Guangrong, YANG Guangbing, et al. Center frequency estimation of broadband ADCP signal[J]. Periodical of Ocean University of China, 2013, 43(2): 87-92.
[6] 梁琴. 走航式ADCP測速技術研究與軟件設計[D]. 哈爾濱: 哈爾濱工程大學, 2016: 3-5.
LIANG Qin. Resarch on the velocity measurement technology and software design of vessel-mounted acoustic Doppler current profiler[D]. Harbin: Harbin Engineering University, 2016: 3-5.
[7] 鄒洪, 向大威, 宣志芬, 等. 多普勒計程儀測速精度的測定[[J]. 聲學技術, 2002, 21(4): 188-191.
ZOU Hong, XIANG Dawei, XUAN Zhifen, et al. Speed-precision measurement for ADL[J]. Technical Acoustics, 2002, 21(4): 188-191.
[8] 周亦軍, 彭東立. 寬帶聲學多普勒流速剖面儀回波信號模型分析[J]. 聲學技術, 2012, 31(2): 179-183.
ZHOU Yijun, PENG Dongli. The model analysis of volume reverberation for broadband acoustic Doppler current profile[J]. Technical Acoustics, 2012, 31(2): 179-183.
[9] 鄒洪, 向大威, 景永剛. 多普勒計程儀的數據平滑方法[J]. 聲學技術, 2008, 27(4): 507-510.
ZOU Hong, XIANG Dawei, JING Yonggang. Data smoothing methods for DVL[J]. Technical Acoustics, 2008, 27(4): 507-510.
Performance test and analysis of broadband acoustic Doppler velocity log
LIN Yi-fan1, CHEN Meng-ying2, JING Yong-gang2, LIU Yu2
(1. Seventh Military Representative Office of Naval Equipment Department in Shanghai, PLA, Shanghai 201108, China;2. Shanghai Acoustic Laboratory, Institute of Acoustics, Chinese Academy of Sciences, Shanghai 201815, China)
Compared with narrow-band acoustic Doppler velocity log, broadband acoustic Doppler velocity log (DVL) has higher time resolution and velocity measurement accuracy, and so has wider application value. The broadband coding form is especially important for the performance of DVL. In this paper, the factors affecting the velocity accuracy are studied theoretically, and a test method using GPS and Octans combined reference system for evaluating the velocity accuracy of DVL is proposed. Under the condition of high speed and low speed, the tests and data analyses of the velocity measurements in both water and bottom modes are carried out with the m coding sequences of 63, 31 and 15 units respectively. The experimental results show that DVL has the characteristics of high accuracy and good stability, and this study provides an important experimental basis for the parameter selection of DVL in practical applications.
Doppler velocity measurement; broadband coding;examination of Doppler velocity log
TB556
A
1000-3630(2019)-03-0348-06
10.16300/j.cnki.1000-3630.2019.03.019
2019-03-04;
2019-04-13
林伊凡(1975-), 女, 浙江溫州人, 工程師, 研究方向為信號處理算法與研究。
陳夢英, E-mail: chen03051302@126.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
童話世界(2020年10期)2020-06-15 11:53:22
當代陜西(2019年9期)2019-05-20 09:47:40
中國生殖健康(2019年3期)2019-02-01 06:12:26
影劇新作(2017年4期)2017-03-22 05:47:21
中國衛生(2016年2期)2016-11-12 13:22:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
海峽姐妹(2014年5期)2014-02-27 15:09:32