敵我識別目標航跡處理技術研究
2019-07-22 01:08:14李永祥倪世道
艦船電子對抗 2019年3期
李永祥,倪世道
(中國電子科技集團公司第三十八研究所,安徽 合肥 230088)
0 引 言
敵我識別(IFF)系統是自動目標識別技術的重要應用之一,廣泛安裝于軍用飛機、艦艇,用于識別目標敵我屬性。敵我識別信號是指敵我識別系統發出的詢問、應答信號,以自動鑒別目標身份屬性。
敵我識別系統主要分為Mark體制和“口令”體制2類,工作機理基本一致,即:雷達IFF詢問機向目標發出一組包含信息的脈沖,目標收到后解析脈沖組含義,IFF應答機發出相應的應答脈沖組,IFF詢問機從目標的應答脈沖中提取信息,判別敵我。
本文主要針對Mark體制的敵我識別信號展開討論。Mark體制的敵我識別信號的工作模式如表1所示[1]。

表1 工作模式
Mark體制敵我識別信號工作模式中,對3/A模式的信號碼值能唯一標識信號目標身份,C模式信號碼值攜帶該信號目標的當前高度,而模式1、2、4、5(以下簡稱“其它模式”)的信號采用軍用加密模式進行傳輸。
基于敵我識別信號對目標進行識別,可以采取協作式與非協作式2類[2]:
(1) 協作式敵我識別中,由詢問機發出無線電詢問信號,目標應答機接收詢問信號,判斷問詢信號的正確性,并給詢問機發送所請求的應答信號,詢問機對應答信號進行解碼,識別目標的敵我屬性。
(2) 非協作式敵我識別,是將被識別目標看作系統的外部環境,利用傳感器偵測敵我識別信號,對目標的結構特征(目標二維投影的長度、寬度、周長和面積等)、統計特征(均值和均方偏差等)、空間特征(方向、位置、速度和距離等) 和輻射參數信號特征進行觀測,通過特定的算法,依靠系統處理器對數據進行相關分類、特征匹配等綜合分析來確定目標的敵我屬性。其工作原理圖如圖1所示。

圖1 非協作式敵我識別
1 敵我識別目標航跡處理
電子偵察裝備對敵我目標信號進行識別的過程采用非協作敵我識別方式。基于前端敵我識別信號偵測傳感器,連續偵聽目標空域,利用敵我識別信號對目標位置進行連續識別,最終形成目標的運動軌跡,即目標航跡,是電子偵察裝備進行敵我識別的主要方式之一。
敵我識別信號不攜帶位置信息(除了C模式碼值為目標的高度信息),無法直接用于目標航跡處理,但是采用分布部署的多個傳感器偵測同一信號,運用基于Chan氏和Taylor級數展開的協同定位算法[3],能夠計算出信號發送時刻目標的定位信息。同一敵我識別信號經過多站協同偵測、信號比對與分選、信號比幅測向等信號處理過程后,形成同一信號的多個偵測信號;對多個偵測信號運用協同定位算法,形成信號發送時刻目標的定位信息。基于目標信號的定位信息可以完成后續的航跡起始、點航關聯、航跡濾波等處理過程,形成目標的航跡數據庫。
敵我識別目標航跡處理過程如圖2所示。

圖2 敵我識別目標航跡處理
但是,由于敵我識別目標會發射不同工作模式的信號,而且群目標會以多種模式交替工作,會造成信號點跡攜帶的信號匹配特性不一致,目標位置信號的精度和數據率不穩定,直接使用該點跡進行航跡處理會導致目標航跡的起始、關聯都出現錯誤,容易造成斷批、混批等問題。
就敵我識別信號的航跡處理來說,其具有定位數據率高的特點,每秒15個以上的定位點碼字(不同模式)并不完全相同,在定位精度一定的情況下,要實現目標航跡起始、關聯、保持、消失、編批等,首先要解決的問題是要判斷這些定位數據是來自同一目標還是不同目標。
因此,在進行航跡處理之前,基于點跡屬性信息對目標點跡進行預處理,盡量將同一采樣周期中屬于同一目標的點跡信息進行歸類、凝聚,能夠極大地提高航跡處理的效率及精確性,降低斷批、混批等問題的發生。
2 點跡處理
2.1 點跡屬性
由多個傳感器對同一敵我識別信號進行偵測得到的多個信號采用協同定位算法[3]能夠得到目標點跡信息,作為航跡處理的輸入。目標點跡以下屬性可能用于后續的航跡處理:
(1) 模式信息:該點跡是對應的原始敵我識別信號的工作模式,包括1、2、3/A,C,4,5等幾種。需要強調的是,信號分選過程無法將3/A模式與C模式的敵我識別信號區分開,因此3/A模式與C模式的點跡無法直接區分其模式。
(2) 定位信息:通過多站協同時差定位算法計算得到的在信號發送時刻的目標點跡位置信息。
(3) 碼值信息:對于3/A模式及C模式點跡,對應的原始敵我識別信號的碼值信息具有明確的意義,即3/A模式碼值唯一標識目標身份,C模式碼值標識目標高度信息。
(4) 航速航向信息:目標點跡的航速航向信息用于航跡處理過程中的外推過程。
為了最大程度地利用點跡模式及碼值信息,提高處理精度及效率,需要區分3/A模式點跡與C模式點跡,并盡可能地將其它模式點跡與A模式點跡關聯。針對敵我識別信號發射周期不固定的特點,點跡處理過程按照固定的采樣周期進行。該采樣周期大小可以根據數據率及精確度要求進行調整。點跡處理流程涉及到的關鍵步驟是:
(1) 點跡預處理:區分同一采樣周期中3/A模式點跡與C模式點跡;
(2) 綜合隸屬度計算:計算C碼點跡及其它模式點跡的綜合隸屬度,指導后期的點跡凝聚;
(3) 目標點跡凝聚:將一個采樣周期中的點跡,按照綜合隸屬度形成以A碼點跡及其它點跡的集合,然后對這些點跡集合分別進行凝聚,形成多個目標點跡,用于后面的航跡起始、關聯等過程。
2.2 A/C碼點區分
A碼值表示目標的身份,對于同一目標,A碼值保持不變,而C碼值表示目標的高度,會發生變化。在目標航跡處理時這2類信息可以作為航跡起始及凝聚很重要的依據。但是由于A碼與C碼在信號解碼及信息解譯時無法區別,因此在航跡處理之前必須首先區分A碼點與C碼點。A/C碼點區分采用以下過程:
(1) 設定1個時間窗口,寬度為3個采樣周期;從第1個采樣周期開始,取3個采樣周期內所有A/C碼點;
(2) 比較時間窗口內所有A/C碼點,如果存在多個點的碼值相同,則這些碼點為A碼點跡,其它點跡待定;
(3) 設定時間窗口內第1個采樣周期中未標記的點為C點;
(4) 將時間窗口向后移動1個采樣周期,取窗口內最后一個采樣周期中的A/C碼點,如果存在與前2個周期中的點碼值相同,則這些點都標記為A碼點,其它點待定。
(5) 重復過程(3)與(4),直到停止或后續無信號采樣。將所有未標記點記為C點。
A/C碼區分過程如所圖3所示。

圖3 A/C碼點區分過程
通過上述過程,能夠將每個掃描周期中的A碼點與C碼點區分開來,A碼點可以直接用于航跡起始,C碼點需要(與其它模式的點跡一樣)計算綜合隸屬度。
2.3 綜合隸屬度計算
綜合隸屬度(MS)是一個采樣周期中C碼點跡或其它模式碼點跡的屬性,表征了該點與同一采樣周期內某個A碼點或某個穩定航跡是屬于同一個目標的可能性。
A碼點跡與一條穩定航跡相對應,而且在一個采樣周期內可能沒有A碼點跡。對每個C碼點或其它模式碼點都有綜合隸屬度與每個穩定航跡對應。
與綜合隸屬度的計算有關的碼點屬性及其影響權值為:碼點的距離信息(w1);碼點高度信息(w2,C碼的高度值取碼值);碼點航速(w3);碼點航向(w4);碼點測向值(w5)。
以下給出了綜合隸屬度MS的計算過程:
(1) 取當前采樣周期T中的每個碼點P;
(2) 對每一條穩定航跡i,其上一采樣周期航跡點為D;
(3) 按照以下公式計算MP[i]:
(1)
式中:V1為P點相對D點的距離偏差率;V2為P點相對D點的高度偏差率;V3為P點相對D點的航速偏差率;V4為P點相對D點的航向偏差率;V5為P點相對D點的測向偏差率。
(4) 計算出P點針對每個航跡i的MP[i]值后,對MP數組歸一化處理;
(5) 取MP[i]=1-MP[i];
(6) 對于3/A碼點,如果其與已有航跡i的關鍵值相同,則其M[i]取100%,其它分量置0;
在計算綜合隸屬度時采用的各類因素的影響權值根據前端設備進行調整。綜合隸屬度從一定程度上表征了其它模式點屬于某個穩定航跡在當前采樣周期內的偵測點的可能性,綜合隸屬度越高,該模式點跡屬于航跡目標的概率越大。
2.4 點跡凝聚
點跡凝聚按與點跡預處理相同的采樣周期進行,每個采樣周期完成點處理后,根據點跡的綜合隸屬度,可以將每個采樣周期的點跡分成3類點跡群,如圖4所示。
(1) A碼點跡群:每個A碼點跡及對該A碼點(或相對應的航跡)的綜合隸屬度大于門限的其它模式點構成一個A碼點跡群;
(2) 混合模式點跡群:對某個航跡的綜合隸屬度都大于門限的所有其它模式點跡構成一個混合模式點跡群;
(3) 其它點跡群:由不屬于A碼點跡群及混合點跡群的點跡構成。
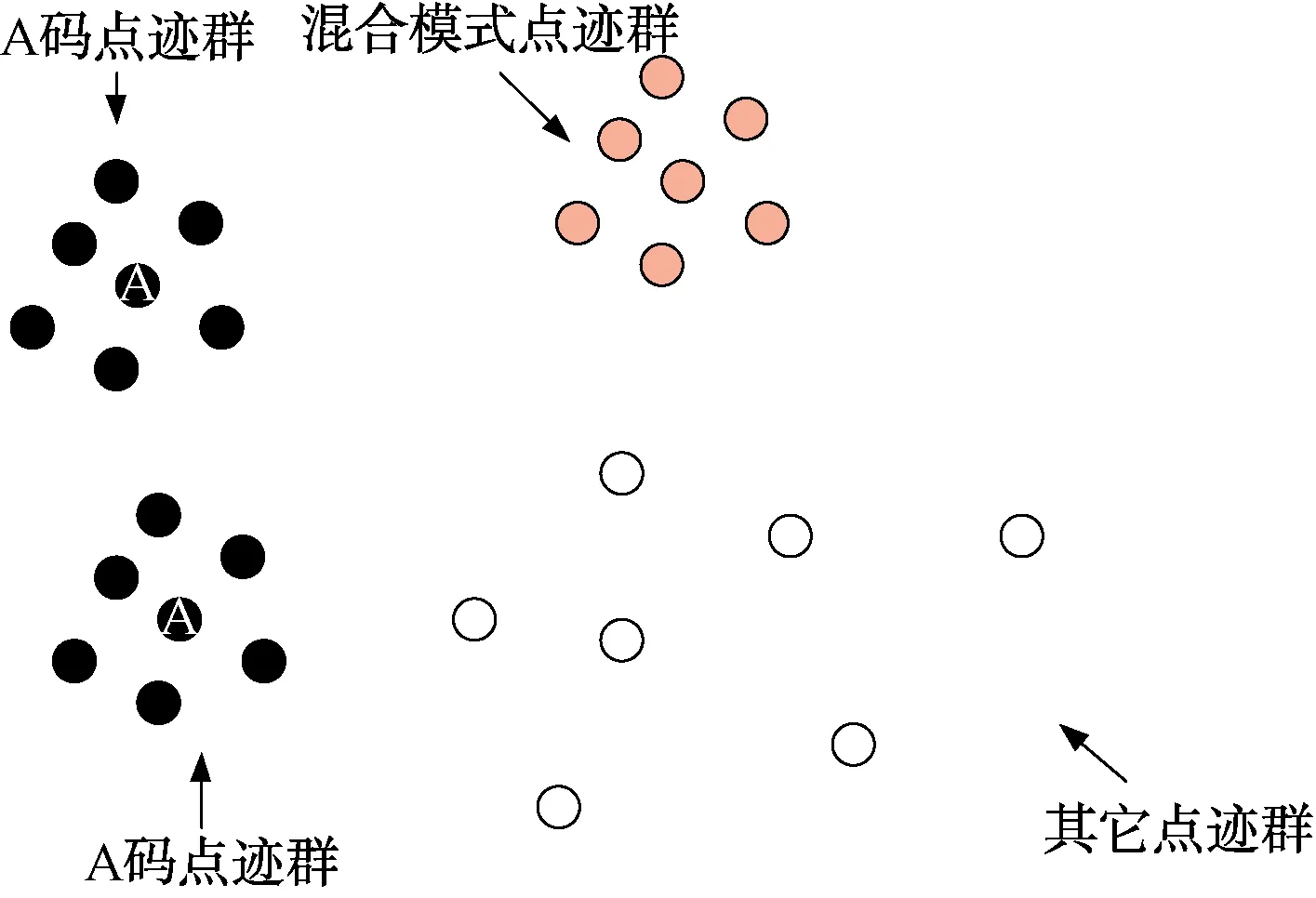
圖4 采樣周期內的點跡分類
每個A碼點跡群或混合模式點跡群中的點跡,分別屬于同一個敵我識別目標,因此可以將每個A碼點跡群或混合模式點跡群單獨進行凝聚,形成該采樣周期內某個目標對應的航跡點,稱為確定點跡。
如果將A碼點看成是綜合隸屬度為100%的碼點,則A碼點跡群與混合模式點跡群都可以采用基于綜合隸屬度的質量中心算法進行凝聚,即:
(2)
式中:Bz為點跡群凝聚后的點跡定位信息;Bi為點跡群中第i個點跡的定位信息;MBi為點跡群中第i個點跡針對當前A碼點或航跡關鍵碼值的綜合隸屬度。
其它點跡群中的點跡不做凝聚,直接進行后續的起始與關聯。
3 航跡起始與關聯
經過點跡凝聚后,目標點跡分成2類:與目標關聯的確定點跡;未進行凝聚的其它點跡群中的點跡,簡稱其它點跡。
敵我識別信號目標航跡起始與關聯采用“窮舉法暫時航跡全自動相關”準則,把連續2個采樣周期間能配對的點跡全部形成暫時航跡。
在暫時航跡建立時,如果下一采樣周期已經存在與穩定航跡相對應的確定點跡,則已經建立的暫時航跡不再向下一采樣周期延伸;如果連續2個采樣周期都是確定點跡關聯,則該暫時航跡為穩定航跡,否則按照以下步驟進行:
(1) 計算穩定航跡的3個門限:距離相關門限,航速相關門限,航向相關門限[4];
(2) 每個點跡在附近找下一采樣周期其它點跡配對形成暫時航跡;
(3) 窮舉門限內所有暫時航跡對,到第3個采樣周期,再根據距離變化穩定性查找第3個采樣周期暫時航跡相關其它點跡;
(4) 繼續(3),直到找到相應的確定點跡或暫時航跡已經向前查找了5個采樣周期;
(5) 計算每個暫時航跡的2個采樣周期之間的距離、航速及航向,如果都在置信度高的相關門限內,則該暫時航跡為第(2)步所關聯的其它模式點跡與相應的穩定航跡關聯。
點跡多航跡假設相關過程如圖5所示。

圖5 點跡多航跡假設相關
圖5中的每種連線都是一條暫時航跡,每個點都和上一采樣周期距離接近的點連接成暫時航跡,對于圖5中B、C、D 3種情況,只有粗實連線的暫時航跡滿足距離變化率穩定且偏差最小,形成穩定航跡。理論上窮舉個數越多越好,但受計算機緩區大小和計算能力限制,目前的技術條件下,建議窮舉個數不超過5個采樣周期。
將本文提出的敵我識別目標航跡處理技術應用于某型敵我識別偵察定位裝備,對多批次目標(其中2架編隊飛行)的飛機進行多站協同偵測、跟蹤定位并航跡處理,能夠形成穩定的目標航跡,如圖6所示,表明該技術能夠明顯提高航跡處理的效率及精確性,解決航跡處理中的斷批、混批等問題的發生。
4 結束語
針對敵我識別目標航跡處理過程中可能出現的斷批、合批問題,本文在分析敵我識別信號工作模式的基礎上,首先對敵我識別目標點跡進行預處理,區分采樣周期內點跡中的3/A與C模式點,并針對其它模式點跡計算與每條穩定航跡相對應的綜合隸屬度,以此為基礎進行點跡凝聚與航跡的起始與關聯。
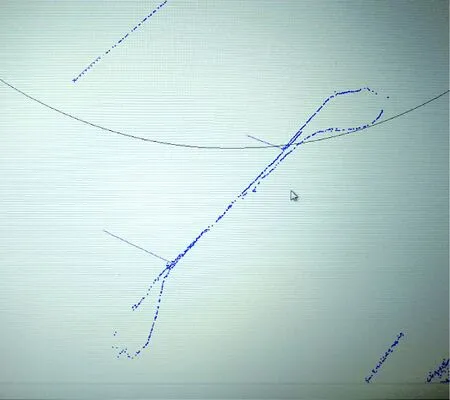
圖6 敵我識別目標航跡處理結果
在后續研究中,還需要從以下2個方面深入:
(1) 綜合隸屬度的計算維度:本文中綜合隸屬度的計算采取的依據包括點跡的航速航向、距離及高度等,而且假設每個維度對綜合隸屬度的影響是均衡的。后續研究將在此基礎上,對各維度進行細分,區分不同維度的影響程度,使綜合隸屬度更貼近實際情況。
(2) 敵我識別信號特征的應用:不同目標的敵我識別信號具有各自的細微特征,在航跡處理過程中如果引入這些特征,可能提高點航相關的精確度,提升航跡質量。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32