聲學多普勒測速儀標校技術研究
2019-07-19 09:42:48喬梓航朱安玨楊蕊
聲學技術 2019年3期
喬梓航,朱安玨,楊蕊
?
聲學多普勒測速儀標校技術研究
喬梓航1,2,朱安玨1,楊蕊1,2
(1. 中國科學院聲學研究所東海研究站,上海 201815;2. 中國科學院大學,北京 100049)
為了提高聲學多普勒測速儀輸出速度的準確度,安裝過程中測速基陣與載體之間的偏差角不可忽略,安裝偏差角包括航向偏角,橫搖角及縱搖角三類。介紹了一種三維空間上的多普勒標定技術,通過高精度的GPS導航儀以及多普勒測速儀對海底測速,利用速度比值差校準航偏角。通過縱向剖面的幾何關系,從航偏角出發進而獲得縱搖角和橫搖角的大小,完成了三維方向上多普勒測速儀的校準,使多普勒測速儀坐標系與載體坐標系能夠進行精確轉換,從而提高了聲學多普勒測速儀輸出速度的準確度。外場試驗較好地證明了該方法的有效性,分析結論看出在二維平面上,造成誤差的原因主要在于安裝偏角的航向偏角,而在三維空間上,尤其垂向速度,誤差主要由縱搖角和橫搖角產生。該方法可以快速地對三維安裝偏角進行校準,運算量小,并且在對海水測速后續研究中可以形成一套體系。
聲學多普勒測速儀;安裝誤差校準;三維空間校準;速度比值法
0 引言
船載多普勒測速儀通過對多普勒頻移信息進行解算進而得到對海水或者對海底的速度信息,進一步可以得到載體航速、航跡等信息。相比于全球定位系統(Global Positioning System, GPS)需要利用衛星定位,多普勒測速儀可以自主得到航跡航速,在進行水下探測時具有GPS所沒有的優勢。
測速儀的主要誤差在于基陣安裝時的安裝偏角,無論人為如何精確地對準,包括前期的基陣設計和后期的基陣安裝,測速基陣總會與載體艏向、橫向和縱向間存在安裝誤差,該誤差從空間上看是三維的誤差,即與載體艏向誤差、載體橫向誤差以及載體的縱向誤差[1-3]。在安裝時,我們希望GPS導航儀、姿態傳感器和測速基陣的坐標系在空間上全部對齊,但是安裝誤差會以恒定偏移的形式添加到解算的載體速度上,從而使得畫出的航跡路線與實際航跡偏離得越來越遠。雖然安裝誤差角度較小,并且下文可以看到的橫搖偏差和縱搖偏差對載體運動的影響遠小于航偏誤差,但是使用多普勒測速儀估計對水速度時,偏移誤差就顯得非常重要,0.1°的縱搖誤差會讓船體運動的0.5%變成垂直分力,0.1°的航偏角誤差會讓船體運動的0.5%變成側向分力。偏差速度與船體運動速度相比較小,但是當研究對水速度時,由于水的運動速度通常比較小,而安裝的誤差保持不變,對水流測速的影響就會越來越大。本文將介紹如何利用多普勒測速儀的對底測量速度校準航偏角,通過和GPS的航跡比對,得到測速基陣安裝的航偏角。再利用縱向剖面的幾何關系,進一步校準橫搖偏角和縱搖偏角。
1 三維空間校準
1.1 航偏角校準
首先對航偏角與橫搖角和縱搖角做出說明:載體行駛時與大地坐標系下正北方向的夾角為航偏角;水平方向上,載體縱傾與水平面的夾角為縱搖角;載體橫搖時與水平面的夾角為橫搖角,此為普遍意義上的定義。而在研究多普勒測速儀時,航偏角、縱搖角和橫搖角的定義如下:安裝時多普勒測速儀與載體之間存在安裝偏角,與載體艏向的夾角為航偏角,與載體縱向的夾角為縱搖角,與載體橫向的夾角為橫搖角。如果想使用船與大地的夾角,應說明由姿態儀獲得的航偏角、縱搖角和橫搖角[6]。而本文中說的航偏角縱搖角和橫搖角泛指安裝時測速儀與載體之間的偏角。測速基陣、載體和大地位置如圖1所示。
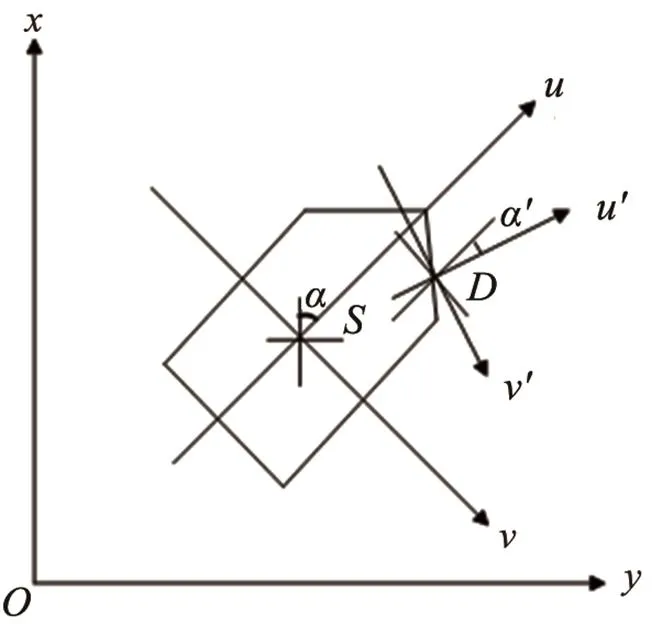
圖1 測速基陣、載體和大地之間的位置關系

從航偏角角度來看,從基陣坐標系到船體坐標系有:

圖2 三種坐標的轉換關系
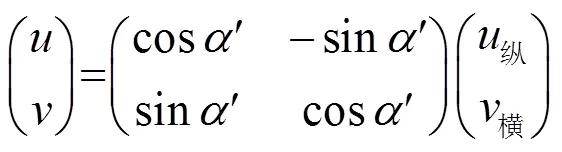
從船體坐標系到大地坐標系有
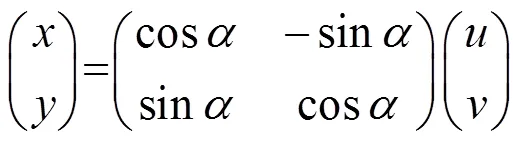
理想情況下我們希望GPS、姿態儀和測速基陣在同一點處,并且保持剛性連接,這樣可以減少船航行時晃動的隨機誤差。考慮安裝偏移的縱、橫搖角度時,有:
其中,為縱搖安裝偏角,為橫搖安裝偏角。文獻[1]提出的最小二乘法用比較精確的方法計算航偏角,但求解時往往不滿足旋轉矩陣求解條件:

文獻[2]令橫搖角、縱搖角的值先為0,進而求解航偏角,然而實際橫搖和縱搖角不為0,從而校準的航偏角存在先決條件上的誤差,盡管在二維平面上,縱、橫搖角度對航偏角的影響較小,但是沒有三維校準還是無法補償縱、橫搖角度對航偏角的影響。而采用航速比值法可以快速地測得航偏角進而對橫搖角和縱搖角進行校準,進一步的縱、橫搖角度校準可以補償其對航偏角的影響,并且計算量小、實現簡便。多普勒測速儀的方向可以用其得到的對底橫向和縱向的速度比值得到,以GPS的數據作為參照,可認為是準確數據,因此,由GPS得到的橫向和縱向速度的比值與多普勒測速儀的橫向和縱向速度比值的差值就是實際的安裝偏角:
該方法可以有效地得到航偏角,因為將GPS看為準確的參考系統,所以該航偏角的主要誤差取決于GPS的精度。因此船載需要高精度的GPS來盡可能地滿足航偏角的校準要求。該方法只適用于可以對底進行測速的多普勒測速儀。
1.2 橫搖角、縱搖角校準
設定多普勒測速儀的波束線與法線的夾角為,為一個確定值,4個波束的斜距為1,2,3,4,和分別為多普勒坐標系的橫軸和縱軸。考慮波束1、2的所形成的剖面,設海底較為平緩,對底深度可以探測,縱向剖面示意圖如圖3所示。
圖3 縱向剖面示意圖
圖3中,角12為多普勒測速儀坐標系與水平面的夾角[4-5],易得:
由式(6)、(7)可知:
同理,考慮波束3/4形成的剖面,得到:


現在已經得到航偏角、橫搖角和縱搖角的安裝偏角、、,行船姿態角由船載姿態儀獲得,設角度為、、,因此實際由多普勒測速儀測得速度為[8-9]


通過式(12)可以得到校準后的速度,由此將多普勒測速儀速度經過兩次坐標變換,使測得速度從開始的多普勒坐標系轉換到大地坐標系,實現了安裝偏角的校準,提高了可使用速度的準確度。
2 試驗驗證分析
試驗使用自研中心頻率為75 kHz的多普勒測速儀,GPS采用Navcom的SF-3050,可以提供實時厘米級的定位精度,姿態儀采用的是Octans光纖陀螺儀,精度能保持在航向0.1°,縱向0.01°。于某試驗場進行了試驗,航速設定為4 kn,安裝圖示如圖4所示,船體長13 m,寬度4 m,試驗湖域的水深在46 m,上下浮動2 m,湖面平靜未遇到較差水況,船體可以保持某一速度勻速行駛。接收到的GPS信息視為精確數據,由GPS可以畫出行船軌跡。姿態儀固定于船上,提供船體的姿態信息。
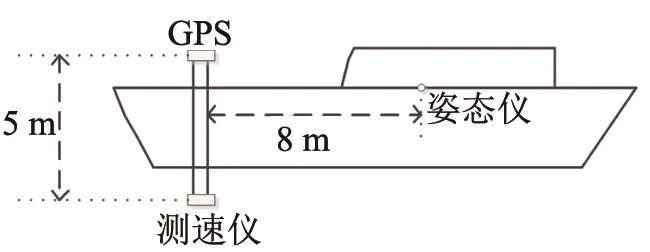
圖4 安裝位置示意圖

圖7為二維平面航跡平均速度法校準對比圖。由圖7可知,與傳統的平均速度法相比,速度比值法在二維平面上得到了更好的校準效果,并且進一步可以提供三維方向的校準,而平均速度法僅僅局限于二維平面的校準,由于平均速度法需要直線平穩的航行條件,所以無法對弧線的航跡做出校準。
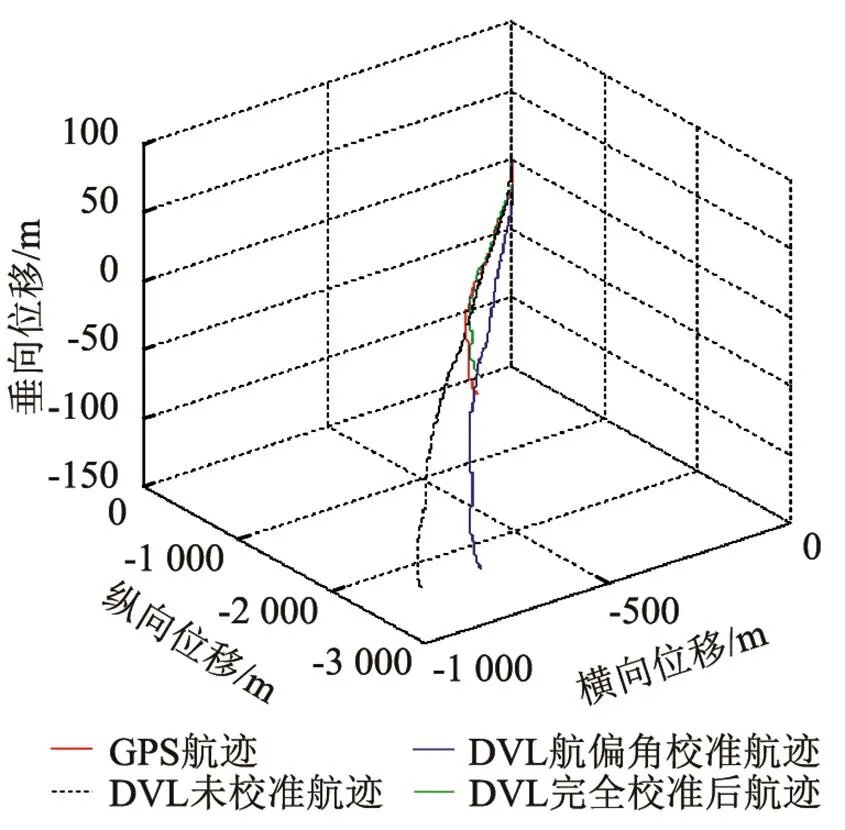
圖5 三維空間直線航跡
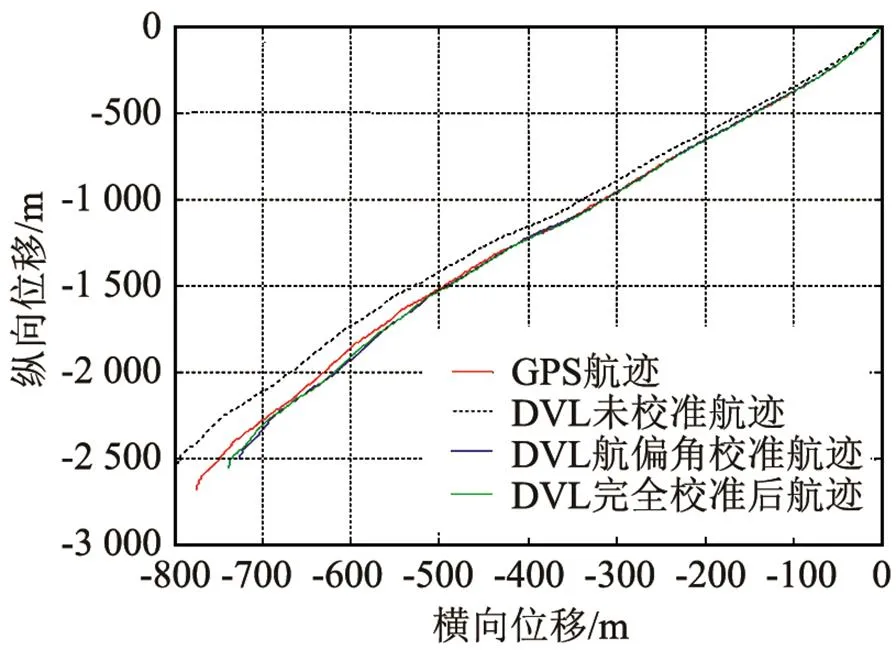
圖6 二維平面直線航跡
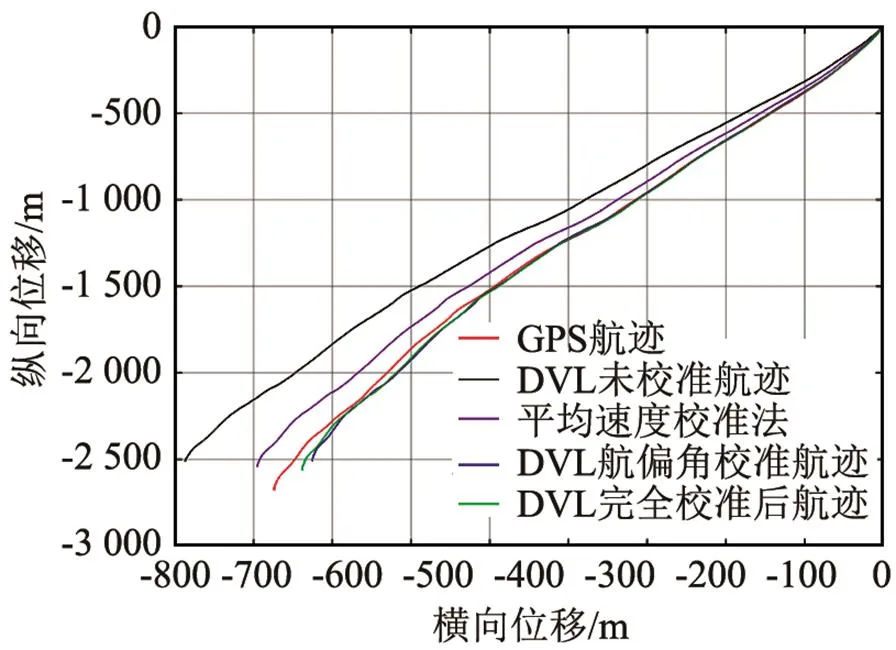
圖7 速度比值法與平均速度法校準的二維平面航跡對比圖
弧線航跡圖如圖8~9所示。
由圖8~9的航跡圖可以看出:即使前期人為的設計和安裝盡量減小多普勒測速儀的安裝偏差,仍然存在較大的誤差,通過三維校準方法可以有效地減小安裝偏差。主要存在安裝偏差的是航偏角,航偏角校準后,二維平面上可以看出行船軌跡向GPS航跡發生最明顯的偏移和靠攏,而橫搖和縱搖安裝偏角對多普勒測速儀解算的航跡在二維平面上的影響不如航偏角大,但在三維空間看,不進行縱搖和橫搖角度的校準會使行船軌跡向下方延伸,并且隨著行船距離的增加,誤差也逐漸增大。

圖8 三維空間弧線航跡
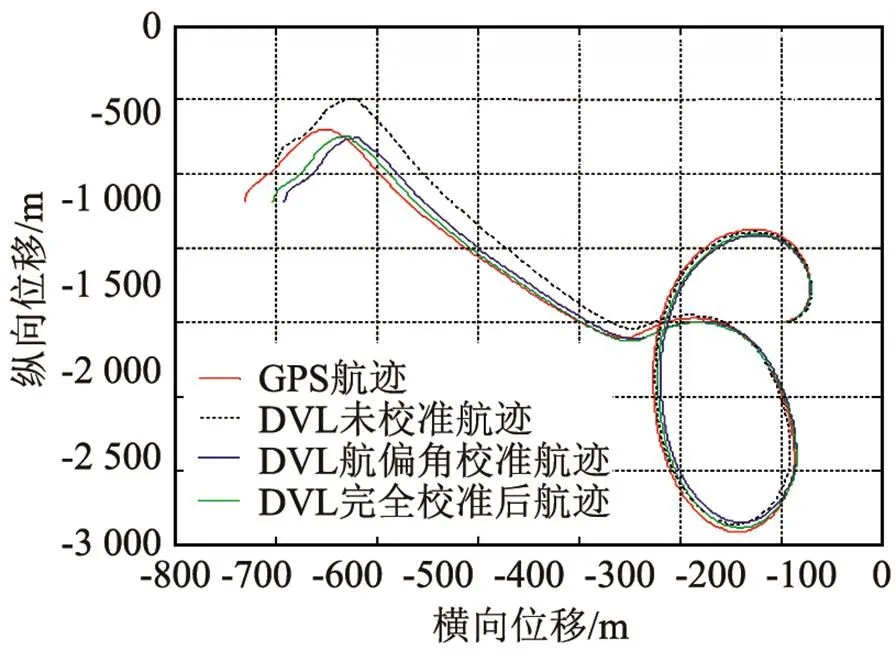
圖9 二維平面弧線航跡
行船軌跡是弧線時,誤差累積比直線航行大,在三維圖可以看出軌跡螺旋向下,即從二維圖來看,載體沒有過多偏離航跡,但在三維空間上和實際情況嚴重不符,經過三維空間上的校準后,可以看出行船軌跡基本回到了一個穩定的平面。
從圖10~15的誤差圖中可以更直觀地看出校準前后的變化。
直線航行時,橫向位移、縱向位移、垂向位移誤差的誤差圖如圖10~12所示。弧線航線時橫向位移、縱向位移、垂向位移誤差如圖13~15所示。
從誤差圖可以看出:
(1) 人為安裝確實存在安裝誤差,并且安裝誤差較大。安裝偏角所造成的測速誤差會使行船距離偏離實際航線越來越遠。
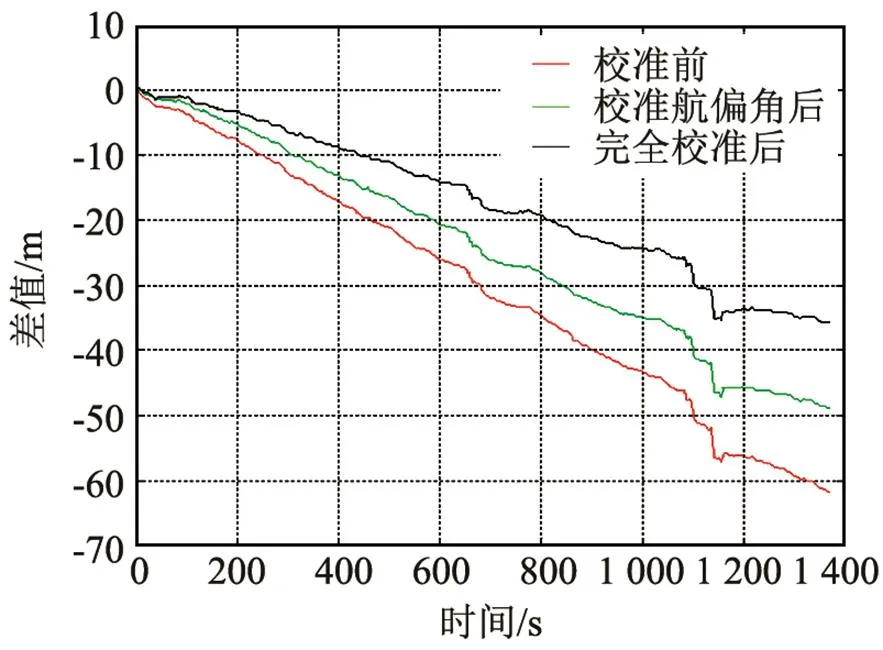
圖10 直線航行的橫向位移誤差
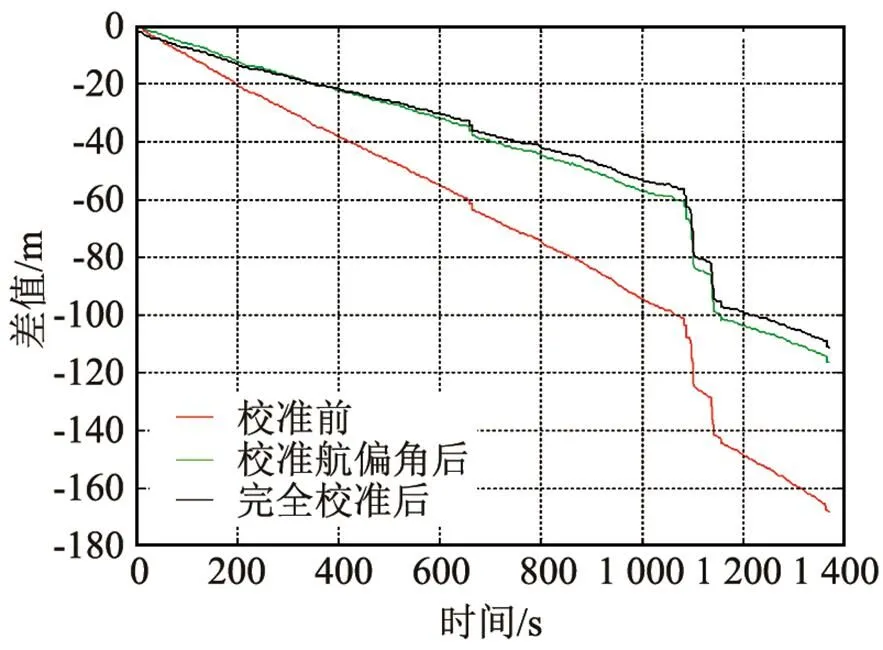
圖11 直線航行的縱向位移誤差
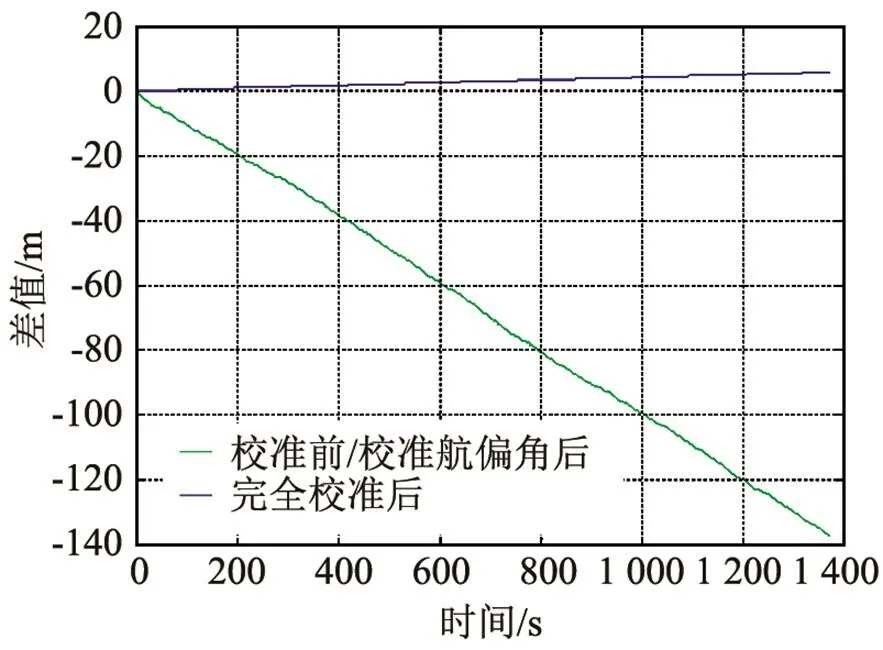
圖12 直線航行垂向位移誤差
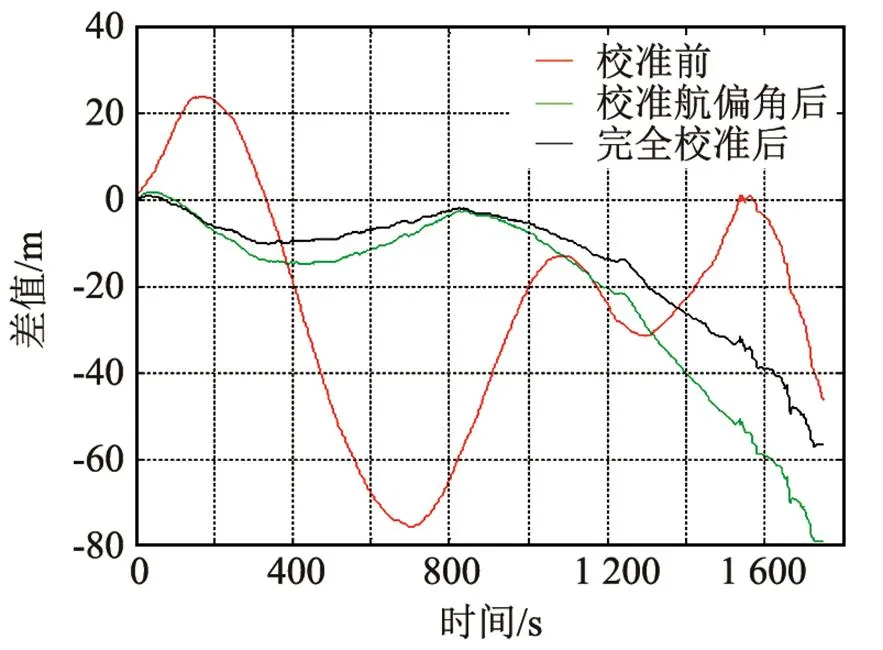
圖13 弧線航行橫向位移誤差
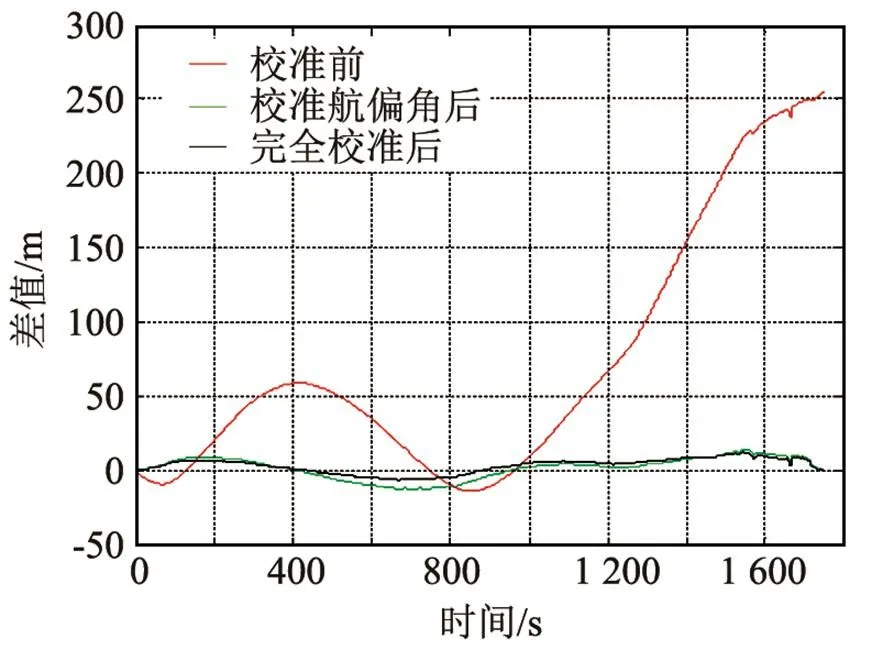
圖14 弧線航行縱向位移誤差
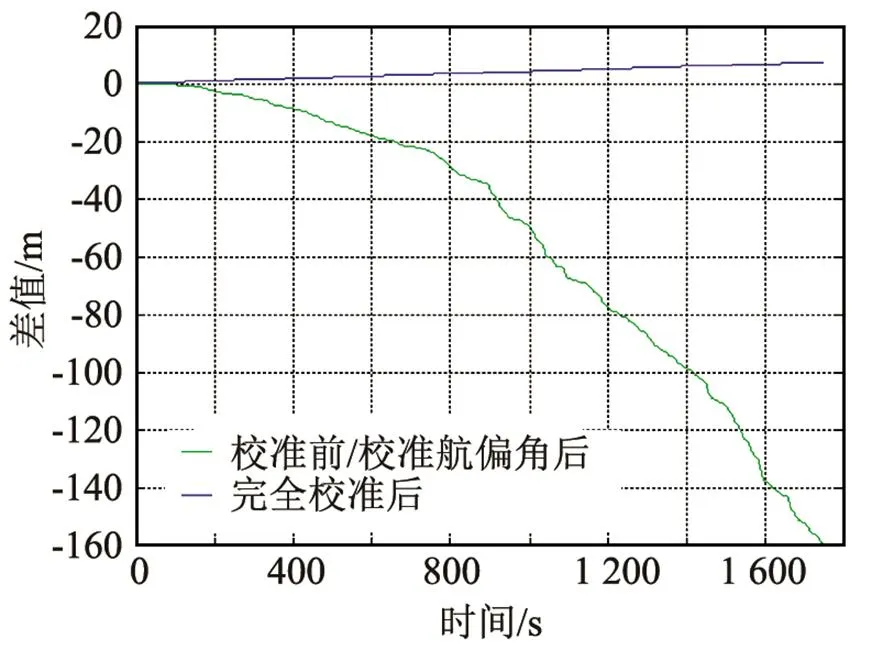
圖15 弧線航行垂向位移誤差
(2) 直線航行時誤差增加比較穩定,弧線航行時,安裝偏角造成的誤差變化豐富,對測量速度影響較大。
(3) 安裝航偏角對二維平面上誤差的影響最大,橫搖角和縱搖角在三維空間上看,對垂向位移誤差影響最大,隨著載體不斷前行,偏離實際航線的距離累積變大,而經過校準的多普勒測速儀能夠明顯改善測速儀得到的速度精度,校準后得到的航行軌跡明顯更貼近于實際航跡。
表1和表2展示了航偏角、縱搖和橫搖偏角在校準前后對誤差的影響情況。表1采用標準差形式將校準前后的值與GPS航跡比對,表2采用測線終點位置結果進行比對。
對比兩種航跡,可以看出直線航行時的校準效果優于弧線航行,主要誤差來源是多普勒測速儀獲得的斜距誤差,這是因為實際試驗的湖底往往是不平整的,并且水深采用了試驗區域的一個均值,但是仍然較好地實現了多普勒測速儀的校準,效果優于原始數據。結果比對可以看出,航偏角仍然是校準誤差的主要來源,因此如果想優化校準效果,仍然需要從航偏角入手減小校準誤差,這里采用了對底測速,校準結果依賴于GPS的精度,倘若可以采用對水測速,筆者認為無論從最終效果還是實際水面上的試驗結果,都將優于對底測速校準,下一步工作將著重于多普勒測速儀對水測速的航偏角校準。
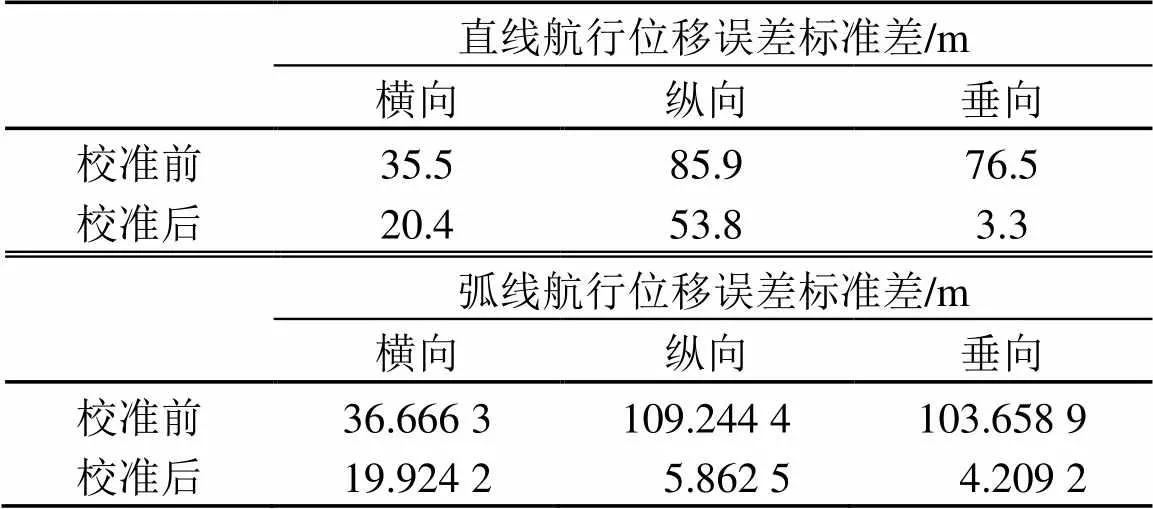
表1 校準前后兩種航行標準位移誤差的對比
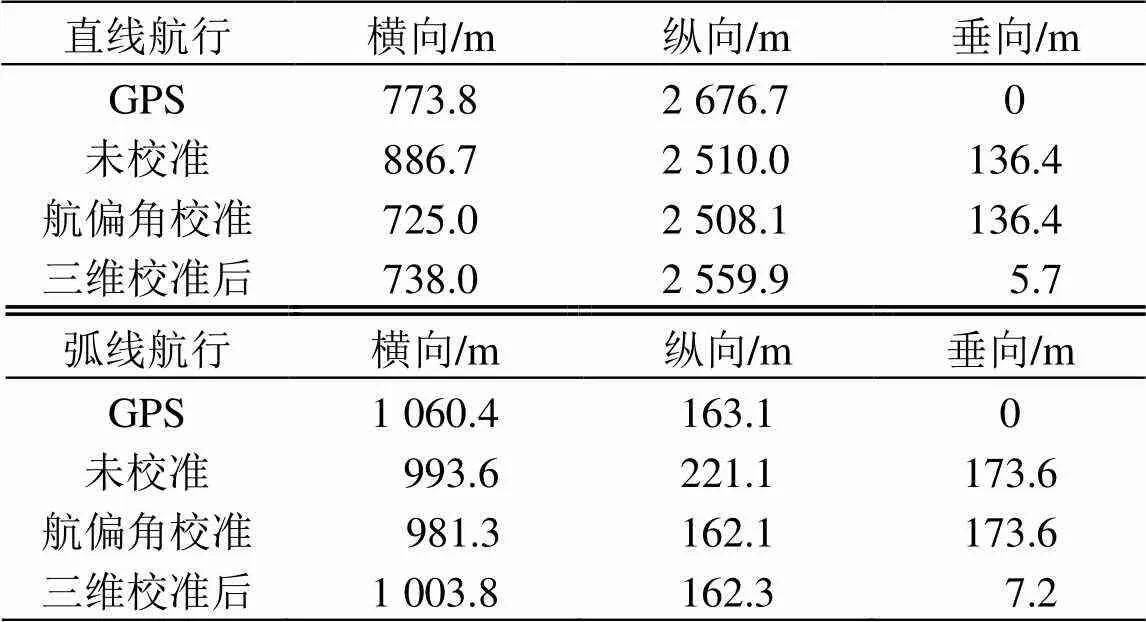
表2 校準前后兩種航行測線終點位置的對比
3 結論
本文采用了速度比值法來校準航偏角,在航偏角的估值基礎上計算縱搖和橫搖的角度,方法實現簡便、運算量小。從試驗結果來看,該方法很好地改善了三維安裝偏角的安裝誤差,提高了測速儀的測速準確度,外場試驗驗證了該方法的有效性。
[1] 曹忠義, 鄭翠娥, 張殿倫. 聲學多普勒速度儀安裝誤差校準方法[J]. 哈爾濱工程大學學報, 2013, 4(34): 434-439.
CAO Zhongyi, ZHENG Cui’e, ZHANG Dianlun. A study on the calibration of installation error in acoustic transducer[J]. Journal of Harbin Engineering University, 2013, 4(34): 434-439.
[2] DOISY Y. Theoretical accuracy of doppler navigation sonars and acoustic doppler current profilers[J]. IEEE, 2004, 29(2): 430-441.
[3] POLLARD R, READ J. A method for calibration shipmounted acoustic Doppler profiler and the limitation of gyro compasses[J]. Journal of Atmospheric and Oceanic Technology, 1989, 6(6): 859-865.
[4] TERRENCE M. On in situ calibration of shipboard ADCPs[J]. Atmospheric and Oceanic Technology, 1989, 29(2): 169-172.
[5] TRUMP C L. Calculation of ADCP alignment offsets using single-beam velocity and depth data[J]. Journal of Atmospheric and Oceanic Technology, 1997, 14(5): 1252-1255.
[6] 胡華烜, 朱敏. 大傾角時的聲學多普勒測速公式誤差分析[J]. 海洋技術, 2008, 27(3): 39-42.
HU Huaxuan, ZHU Min. Error analysis of acoustic doppler velocity measurement formula at high angle[J]. Oceanography, 2008, 27(3): 39-42.
[7] TRUMP C L, 1986: Estimating absolute current velocities by merging shipboard Doppler current profiler data with LORAN-C data[C]//Proc. IEEE Third Working Conf. on Current Measurement, 177-183.
[8] 劉德鑄, 鄭翠娥, 張殿倫. 傳感器安裝誤差在聲學多普勒計程儀中的校準[J]. 傳感器與微系統, 2009, 28(11): 71-73.
LIU Dezhu, ZHENG Cui’e, Zhang Dianlun. Calibration of sensor installation error in acoustic Doppler log[J]. Sensors and Microsystems, 2009, 28(11): 71-73.
[9] ROWE, F D, YOUNG J W. 1979: An ocean current profiler using Doppler sonar[C]//IEEE Proceedings Oceans, 1979, 292-297.
[10] 袁書明, 曹忠義. 基于航跡-航深信息的聲學測速基陣校準技術研究[J]. 聲學技術, 2017, 36(5): 431-436.
YUAN Shuming, CAO Zhongyi. Research on acoustic velocity array calibration technology based on track and navigation depth information[J]. Technical Acoustics, 2017, 36(5): 431-436.
Study on the calibration method of acoustic Doppler velocimeter
QIAO Zi-hang1,2, ZHU An-jue2, YANG Rui1,2
(1. Shanghai Acoustic Laboratory, Institute of Acoustics, Chinese Academy of Sciences, Shanghai 201815, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
In order to improve the accuracy of acoustic Doppler velocimeter, the deviation angles between the velocity transducer and the carrier in the process of installation can not be ignored. The deviation angles include yaw angle, roll angle and pitch angle. A calibration method in three dimensional space is proposed in this paper. By using high-precision GPS navigator and Doppler velocimeter to measure bottom velocity, the yaw angle can be calibrated in terms of the velocity ratio. Then, by the geometric relationship of longitudinal profile, the magnitudes of pitch angle and roll angle are obtained from the yaw angle. Thus, the calibration of the 3D directional Doppler velocimeter is completed and the Doppler velocimetry coordinates and the carrier vector coordinates can be transformed accurately, which makes the accuracy of acoustic Doppler velocimeter improved. The effectiveness of this method is proved in field tests. The analysis results show that the main error of velocity measurement in two dimensional plane is caused by yaw angle, however, in three dimensional space, particularly for measuring vertical velocity, the error is mainly caused by roll angle and pitch angle.
acoustic Doppler velocimeter; calibration error calibration; three dimensional calibration;Speed ratio method
TB565+.2
A
1000-3630(2019)-03-0284-06
10.16300/j.cnki.1000-3630.2019.03.008
2018-04-26;
2018-06-28
國家自然科學基金資助項目(11574249、11074202)
喬梓航(1993-), 男, 山東煙臺人, 碩士, 研究方向為聲學多普勒測速儀校準技術。
朱安玨, E-mail: 13918199486@163.com