聯(lián)合外形響應(yīng)的深度目標追蹤器
2019-07-16 08:50:00孫海宇陳秀宏肖漢雄
智能系統(tǒng)學報 2019年4期
孫海宇,陳秀宏,肖漢雄
(江南大學 數(shù)字媒體學院,江蘇 無錫 214122)
單目標跟蹤是一項基礎(chǔ)而又重要的計算機視覺任務(wù)。通常所講的單目標跟蹤是指:在視頻的首幀,給定目標的初始狀態(tài)(如:位置、大小),然后在視頻的后續(xù)幀中估計出目標的狀態(tài)[1]。估計一個對象的運動軌跡[2]可以達到目標跟蹤的目的,但是目標軌跡的估計在多種干擾因素的影響下易有較大的誤差。常見的干擾因素有:光照變化 (illumination variation,IV)、大小變化 (scale variation,SV)、遮擋 (occlusion,OCC)、變形 (deformation,DEF)、運動模糊 (motion blur,MB)、快速運動(fast motion,F(xiàn)M)、平面內(nèi)旋轉(zhuǎn) (in-plane rotation,IPR)、平面外旋轉(zhuǎn) (out-of-plane rotation,OPR)、部分顯示(out-of-view,OV)、背景雜亂(background clutters,BC)、目標像素過少 (low-resolution,LR)等[3]。實際上,目標跟蹤就是要在當前幀中確定與目標相關(guān)的兩大要素:位置以及大小。有很多方法可以實現(xiàn)該目的,其中,檢測就是一種比較流行的方法。若在基于檢測的目標跟蹤方法中采用前背景分類器,這種追蹤方法又稱作基于判別式模型[4]的追蹤方法。判別式追蹤器充分利用了視頻序列中每一幀的前背景信息,從而達到區(qū)分目標和背景的目的,如:Henriques等[5]所提出的追蹤器以及Danelljan等[6]提出的追蹤器,從某種意義上講,以上追蹤器亦可稱為模板匹配類的追蹤器。這類追蹤器主要通過已知的目標信息,習得一個與目標相關(guān)的濾波模板,然后使用該模板在搜索區(qū)域(可能包含目標的區(qū)域)進行滑動匹配,以匹配度的形式來反應(yīng)匹配區(qū)域是否是目標位置,并將匹配度最高的位置作為最佳目標位置。文獻[7]中,主要討論的是樣本采樣問題,當樣本的數(shù)目采集的越多時,這些樣本會構(gòu)成一種理論比較完善的循環(huán)結(jié)構(gòu),故而提出了循環(huán)采樣的方法。文獻[5]中,基于文獻[7],使用樣本的原始像素或者方向梯度直方圖作為樣本特征求解模板,然后使用該模板進行目標位置的匹配。從跟蹤的定義上來看,以上主要解決的是目標追蹤中的位置問題。文獻[6]中,基于文獻[5],主要討論了目標尺度問題,在求解尺度以及位置的時候,使用的是方向梯度直方圖作為特征。類似的追蹤器還有文獻[8-9],而最近幾年,深度學習在許多應(yīng)用領(lǐng)域表現(xiàn)出了優(yōu)秀的成績[10],目標追蹤領(lǐng)域也不例外,自Wang Naiyan將深度學習算法應(yīng)用到跟蹤領(lǐng)域[11]后,深度學習類的追蹤器也涌現(xiàn)出不少優(yōu)秀的作品,文獻[12]中,提出了基于孿生網(wǎng)絡(luò)的深度追蹤器,其在利用目標信息提取出卷積特征之后,僅僅使用了卷積特征在搜索區(qū)域進行目標位置的匹配。文獻[13]在文獻[12]的基礎(chǔ)上直接將相關(guān)濾波轉(zhuǎn)化為了神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)層,使得兩者合二為一,成為一個端到端的整體系統(tǒng),但是依舊僅僅使用卷積網(wǎng)絡(luò)所提取出來的特征。在最近的研究中,孿生網(wǎng)絡(luò)受到了極大的關(guān)注。文獻[14]提出了一種動態(tài)孿生網(wǎng)絡(luò)通過在線學習目標的外形變化以獲得目標的時域信息;文獻[15]結(jié)合RPN改進了候選框的生成來提高追蹤的精度;文獻[16]則嘗試通過改變訓練樣本的數(shù)據(jù)分布來獲得更具有判別性的特征;文獻[17]基于FaceNet中的Triplet Loss來改進損失函數(shù)。本文認為,網(wǎng)絡(luò)卷積出來的特征其實是碎片化的,故而在進行目標位置匹配的時候,易在遠離目標的地方產(chǎn)生位置響應(yīng)噪聲,從而影響目標位置的確定。因此,本文設(shè)計了一種聯(lián)合外形響應(yīng)的深度目標追蹤器,利用外形信息的位置響應(yīng)來修正卷積的位置響應(yīng),從而得到更準確的目標定位,并通過實驗與其他追蹤器進行了比較,驗證了思路的可行性。
1 模板匹配以及外形信息
模板匹配類的追蹤器,基本思想是通過衡量目標與搜索區(qū)域內(nèi)各個部分的相似度,選取相似度最大的位置作為目標位置。事實上,這種思想在基于深度學習的追蹤器[12]和基于相關(guān)濾波的追蹤器[5]中均有體現(xiàn)。
1.1 孿生網(wǎng)絡(luò)追蹤器
在深度追蹤器中,模板的匹配大都是通過孿生網(wǎng)絡(luò)來實現(xiàn)的,Bertinetto等[12]第一次將孿生網(wǎng)絡(luò)應(yīng)用于目標追蹤。圖1展示了一個典型的孿生網(wǎng)絡(luò)結(jié)構(gòu)圖,表示已經(jīng)訓練好的、權(quán)值固定的卷積網(wǎng)絡(luò);表示上一幀的目標信息;表示搜索區(qū)域;表示相關(guān)操作,實踐中具體表現(xiàn)為卷積運算。當與分別經(jīng)過卷積網(wǎng)絡(luò)提取特征之后,分別得到卷積特征,以及,通過計算兩者之間的相關(guān)性可得到搜索區(qū)域中每個部分與目標之間的相關(guān)程度響應(yīng)(圖中的紅點表示搜索區(qū)域中紅色部分與目標的相關(guān)程度,而藍點則表示搜索區(qū)域中藍色部分與目標的相關(guān)程度),當?shù)玫巾憫?yīng)圖之后,通過三線性插值,最大響應(yīng)值的位置便可作為當前幀的目標位置。
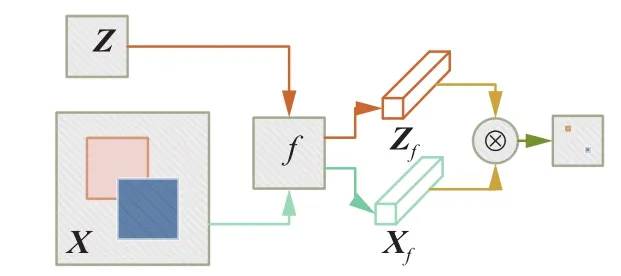
圖 1 孿生網(wǎng)絡(luò)追蹤器結(jié)構(gòu)圖Fig. 1 Siamese network tracker structure
1.2 相關(guān)濾波追蹤器
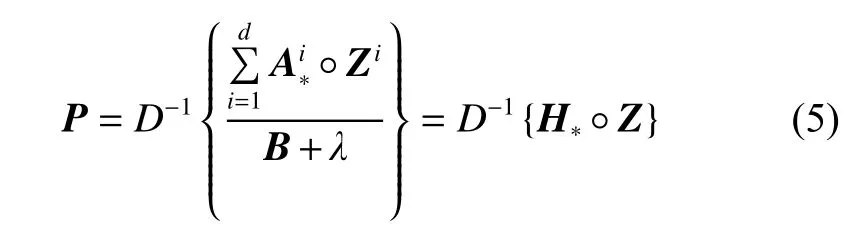
相關(guān)濾波類的追蹤器最早是由文獻[18]提出來的,文獻[7]在其基礎(chǔ)上發(fā)展了循環(huán)采樣以及引入了核方法,但在文獻[19]中,將目標位置和大小分開考慮,與本文將追蹤中兩大要素分而治之的思想更為契合,因此為本文所選用。為了獲取目標位置的響應(yīng)圖,相關(guān)濾波類的追蹤器要找到一個最優(yōu)化的濾波器,該濾波器由所構(gòu)成。通過最小化如下的代價函數(shù)獲得:



1.3 目標外形信息
在人類視覺中,目標的外形信息具有重要的意義,倘若缺少了目標的外形信息,人類就會產(chǎn)生‘一葉障目'的視覺障礙,因此在過去的幾十年中,學者們對于目標的外形信息有著大量的研究[20-23]。目標的外形信息一般存在于目標與背景之間,能夠有效地突出目標物,為雙眼提供一個良好的聚焦區(qū)域。由于目標與背景在外形上存在較大的差異,因而學者們常常使用微分的方式來檢測目標的外形信息,常見的方式有Canny、Sobel、Roberts、Scharr、Prewitt、Hog,此外,還有小波變換等方式,其檢測效果如圖2所示。
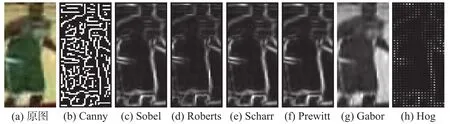
圖 2 外形信息檢測方法Fig. 2 The samples of methods to detect outlines
2 聯(lián)合外形響應(yīng)的深度目標追蹤器
本文在可視化卷積網(wǎng)絡(luò)特征后,觀察到其與文獻[24]所述的局部性、方向性的特征具有相似性后(如圖3),更加驗證了本文聯(lián)合外形信息的想法。圖3(a)為卷積網(wǎng)絡(luò)所提取的特征,圖3(b)為稀疏編碼所求得的基,可以發(fā)現(xiàn)圖3(a)的特征與未完全處理的基具有很高的相似性。如前所述,提取目標外輪廓信息有相當多的方法,鑒于方向梯度直方圖在追蹤問題上的廣泛應(yīng)用,本文選擇使用方向梯度直方圖來提取外形信息。
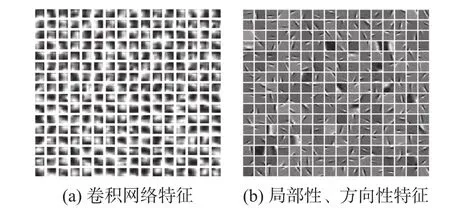
圖 3 特征對比Fig. 3 Features comparison
2.1 網(wǎng)絡(luò)結(jié)構(gòu)
本文提出的聯(lián)合外形響應(yīng)的深度目標追蹤器的結(jié)構(gòu)如圖4所示,它由兩個部分組成,一個是由卷積網(wǎng)絡(luò)所構(gòu)成的位置匹配部分,這個部分主要使用卷積網(wǎng)絡(luò)提取的目標特征進行位置匹配,稱之為卷積匹配部分,另一個是利用外形信息使用相關(guān)濾波進行位置匹配,稱之為濾波匹配部分。

圖 4 本文目標追蹤器結(jié)構(gòu)Fig. 4 The architecture of the proposed deep tracker
2.1.1 卷積匹配部分
在追蹤器的卷積匹配部分僅使用卷積網(wǎng)絡(luò)提取的特征進行目標位置的匹配,同時融合了尺度考慮,同文獻[12]中所表示的那樣,本文僅使用了3種尺度,追蹤器的輸入同文獻[12]一樣是一對樣本,一個是在初始幀中標記出來的目標,用來表示,其維度是,另一個是在當前幀中,以上一幀目標中心為中心的包含背景的目標搜索區(qū)域,用表示,其維度是,將兩者通過權(quán)值固定的卷積網(wǎng)絡(luò),是文獻[25]中所提出的AlexNet網(wǎng)絡(luò)(不包含全連接層),提取出對應(yīng)的卷積特征和之后,通過相關(guān)操作得出目標的位置響應(yīng)。
2.1.2 濾波匹配部分
在追蹤器的濾波匹配部分,主要使用方向梯度直方圖來提取目標的外形信息。由于目標的外形信息常常存在于目標與背景之間,為了提取目標的外形信息,需要包含一些背景信息,因此本文直接在中進行目標的外形信息提取。如果當前幀是首幀的話,就使用式(2)初始化濾波匹配時所需要的和,如果當前幀不是首幀的話,就利用式(5)求得目標的位置響應(yīng),然后再利用式(3)和式(4)更新和。
2.2 修正部分
在沒有使用外形信息對位置響應(yīng)進行修正的情況下,由于卷積特征中多是類似于局部的、方向性的特征,這種碎片化的特征容易導致在遠離目標的區(qū)域處產(chǎn)生極大的位置響應(yīng)點,從而形成位置響應(yīng)噪聲。如圖5中卷積匹配的位置響應(yīng)圖所示(X、Y軸無十分重要的物理意義,Z軸表示相關(guān)性程度,數(shù)值越大表示該處與目標的相關(guān)性越大,則顏色越紅)。相對的,在搜索區(qū)域中,目標的外形占比一定大于局部特征的占比,所以利用了外形信息的濾波匹配的位置響應(yīng)大多會集中在目標區(qū)域處,如圖5中濾波匹配的位置響應(yīng)圖所示,聯(lián)合該外形信息的位置響應(yīng),可以有效地突出目標的所在區(qū)域,使得位置響應(yīng)集中在目標區(qū)域處,從而達到抑制噪聲,避免位置發(fā)生漂移的目的。如圖5中修正的位置響應(yīng)圖所示,可以看到目標的位置響應(yīng)圖在修正后,抑制住了左邊的噪聲響應(yīng)。聯(lián)合該外形位置響應(yīng),涉及到數(shù)據(jù)融合技術(shù),可以使用加權(quán)平均法、貝葉斯估計法[26]、卡爾曼濾波法[27]等,本文為驗證想法直接采用了最為簡單的加權(quán)平均法:



圖 5 位置響應(yīng)的變化Fig. 5 The transform of position response map
3 實驗配置以及評價指標

3.1 實驗細節(jié)
訓練時,網(wǎng)絡(luò)的輸入是一對樣本,并且,執(zhí)行
卷積匹配部分,網(wǎng)絡(luò)的構(gòu)成同文獻[12]一樣(去除了網(wǎng)絡(luò)的全連接部分),權(quán)重的取值是經(jīng)過405 650次隨機梯度下降得到的,網(wǎng)絡(luò)訓練的數(shù)據(jù)集是從ILSVRC-2015視頻數(shù)據(jù)集[29]中提取出的4 417個視頻序列,網(wǎng)絡(luò)訓練的損失函數(shù)為一次梯度下降使用8對樣本,一對樣本中,的維度是,的維度是,經(jīng)過網(wǎng)絡(luò)后,的維度是,的維度是,經(jīng)過三線性插值后,維度為,學習率采用動態(tài)學習率,初始值為,然后使用如下的指數(shù)衰減法進行衰減:


圖 6 效果圖Fig. 6 The effect of
3.2 實驗設(shè)備
本文使用Tensorflow[30]框架來實現(xiàn)模型,版本為1.4.0,實驗是在配置為i5-7300HQ 2.5 GHz CPU,GeForce GTX1050 GPU的筆記本中運行的。
3.3 測試數(shù)據(jù)集以及評價指標
3.3.1 指標
目標追蹤需要解決兩個問題:位置和大小,因此,評價一個追蹤器的優(yōu)劣往往通過精度圖和成功圖來描述[4]。精度圖是指在不同的中心誤差下,目標追蹤的成功率所構(gòu)成的圖;成功圖是指在不同的重疊率下,目標追蹤的成功率所構(gòu)成的圖。其中,中心誤差是指:追蹤器所輸出的目標框的中心與標簽目標框的中心之間的誤差,常用歐氏距離表示,單位是像素;重疊率o的定義為

3.3.2 測試數(shù)據(jù)集
本文使用目標追蹤測試平臺(object tracking benchmark,OTB)[1,3]中 CVPR-2013、OTB-50和OTB-1003個數(shù)據(jù)集對現(xiàn)有的算法進行評估。這3個數(shù)據(jù)集分別有51、50和100個視頻序列,每個視頻序列都包含了IV、SV、OCC、DEF、MB、FM、IPR、OPR、OV、BC、LR中的多個干擾因素。在這些干擾因素的影響下,追蹤測試平臺統(tǒng)計追蹤器的成功率,以精度圖和成功圖的形式來反應(yīng)追蹤器的追蹤性能。
3.3.3 外形信息的時間花費
本文在不同分辨率圖上測試了提取外形信息以及獲得其對應(yīng)的位置響應(yīng)所花費的時間,如圖7所示。分別給出了提取外形信息的時間花費和獲取外形信息對應(yīng)的位置響應(yīng)所花費的時間。從圖中可以看出,外形信息的提取時間相對較為合理(和圖像分辨率之間接近線性關(guān)系);同時,獲取位置響應(yīng)的時間相對較長,有待進一步改進。

圖 7 時間花費Fig. 7 The results of elapsed time
3.4 平臺測試結(jié)果
本文在目標追蹤測試平臺上和近幾年優(yōu)秀的追蹤器 CFNet_conv3[13]、SiamFC_3s[12]、Staple[8]、fDSST[7]、 ACFN-selNet[31]、 SAMF[9]、 LCT[33]、MEEM[32]、ACFN-attNet[31]、DSST[19]、KCF[5]進行了比較,其結(jié)果如圖8所示,這里僅給出了CVPR-2013的結(jié)果,并利用圖9,直觀展示了部分追蹤效果(更多的結(jié)果數(shù)據(jù)請訪問文獻[34]),圖8(a)代表數(shù)據(jù)集的成功圖結(jié)果,圖8(b)代表數(shù)據(jù)集的精度圖結(jié)果。從圖8(b)的結(jié)果中可以看出,在中心誤差閾值很大的情況下,本文追蹤器依舊有著優(yōu)秀的成功率,說明在追蹤的過程中,本文的追蹤器發(fā)生了較少的邊框漂移,反應(yīng)到圖8(a)的成功圖中,可以看到,在重疊率閾值很小的情況下,本文追蹤器的成功率依舊優(yōu)秀,而很多追蹤器的成功率卻不理想,說明他們在追蹤的過程中,發(fā)生了較多的邊框漂移現(xiàn)象,導致了目標丟失;而本文追蹤器在進行位置確定的時候,利用了外形信息來抑制原本位置響應(yīng)中的噪聲點,所以具有較少的邊框漂移現(xiàn)象。以上的結(jié)果表明本文的追蹤器具有優(yōu)秀的追蹤效果。

圖 8 測試結(jié)果Fig. 8 The results of object tracking benchmark

圖 9 追蹤效果直觀感受Fig. 9 The direct feeling of our tracker
3.5 直觀效果
在追蹤測試平臺的測試序列中,每個序列都包含了多個干擾因素。從這么多的測試序列中取得優(yōu)秀的追蹤效果是相當不容易,由于本文使用了外形信息來對目標的位置響應(yīng)進行噪聲抑制,所以從上面的測試平臺給出的追蹤結(jié)果可知,本文的追蹤器具有優(yōu)秀的追蹤能力,但由于篇幅限制,這里給出幾組具有代表性的視頻序列追蹤效果的直觀展示,如圖9所示,正紅為本文追蹤器。
4 結(jié)束語
本文嘗試從理解卷積特征的基礎(chǔ)上來理解目標追蹤中卷積位置響應(yīng)的結(jié)果,從而指導如何修正目標跟蹤中的卷積響應(yīng)。通過分析可知:卷積網(wǎng)絡(luò)抽離出的卷積特征類似于局部性、方向性的特征,是碎片化的,在進行位置匹配的時候,可以通過突出目標區(qū)域的方式來緩和這種碎片化特征的影響。和最近幾年優(yōu)秀的追蹤器相比,該思路具有一定的可行性,能夠有效提高目標位置定位的精度。接下來的工作可以進一步探究如何縮短位置響應(yīng)的時間;本文卷積網(wǎng)絡(luò)的許多特征之間具有很高的相似性,是否可以直接通過稀疏化的方式來實現(xiàn)抑制位置響應(yīng)中的噪聲也是值得研究的。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年23期)2014-02-27 14:19:15
民生周刊(2012年10期)2012-10-14 09:06:46
