水下無人潛航器無動(dòng)力下潛彈道分析*
2019-07-08 01:55:18
艦船電子工程 2019年6期
(中船重工第七一〇研究所 宜昌 443000)
1 引言
隨著海洋環(huán)境的變化,以及對海洋各項(xiàng)科考事業(yè)的開展。水下潛航器,尤其是無人潛航器的發(fā)展越來越迅猛。其中在深海考察作業(yè)中,由于大水深對于潛航器的總體要求高,在下潛過程中多采用無動(dòng)力下潛的方式來使得潛航器到達(dá)預(yù)定的海深,當(dāng)深度傳感器檢測到預(yù)定水深深度的時(shí)候,潛航器動(dòng)力電上電,螺旋槳及舵板開始運(yùn)動(dòng),潛航器開始可考作業(yè)。本文從理論分析的方式入手,深入分析了6000m水深潛航器無動(dòng)力下潛過程中的運(yùn)動(dòng)參數(shù)[1-2]。
2 無動(dòng)力下潛過程分析
深海潛航器的最大工作水深為6000m,為了節(jié)省能源,從水面到深海作業(yè)區(qū)數(shù)千米海深的路程中不使用動(dòng)力下潛方式,而采用無動(dòng)力下潛運(yùn)動(dòng)的方式完成下潛過程。無動(dòng)力下潛運(yùn)動(dòng)是指在水面平衡(即重力與浮力基本平衡)的狀態(tài)下,在其艏部加載一個(gè)下潛壓載(重物)使?jié)摵狡鲙в幸粋€(gè)大縱傾角下潛。在下潛的過程中,潛航器的舵板打至下潛舵位置,并在試驗(yàn)過程中摸出合適的下潛舵角。如圖1為潛航器下潛過程中的受力分析圖。
潛航器無動(dòng)力下潛過程中,艏部有一個(gè)額外的下潛壓載,提供主要的下潛負(fù)浮力,此時(shí)舵板提供一個(gè)下潛的補(bǔ)充角度,由于水壓的推進(jìn),以及對下潛過程中航行器姿態(tài)的要求,可以通過姿態(tài)傳感器的監(jiān)測,調(diào)動(dòng)潛航器中控程序來調(diào)整舵板的角度,來調(diào)節(jié)航行器的姿態(tài)。直至航行器姿態(tài)參數(shù)達(dá)到預(yù)設(shè)值。
航行器在無動(dòng)力下潛過程中會(huì)有縱向的運(yùn)動(dòng)。潛航體艏部裝有一個(gè)弧板弧板的角度可調(diào)。由于在下潛的過程中,弧板的角度與潛航器的中線偏移一個(gè)夾角,在潛航器下潛的過程中會(huì)弧板受到一個(gè)側(cè)推力的作用,會(huì)有縱向的速度。下潛速度和縱向速度的合速度會(huì)使得潛航器在水下呈現(xiàn)螺旋下潛的姿態(tài),如圖1所示,并最終達(dá)到預(yù)定水深。在預(yù)定水深附近,潛航器上動(dòng)力電,螺旋槳及舵板開始運(yùn)行,調(diào)整潛航體姿態(tài)為正常姿態(tài)[3-5]。
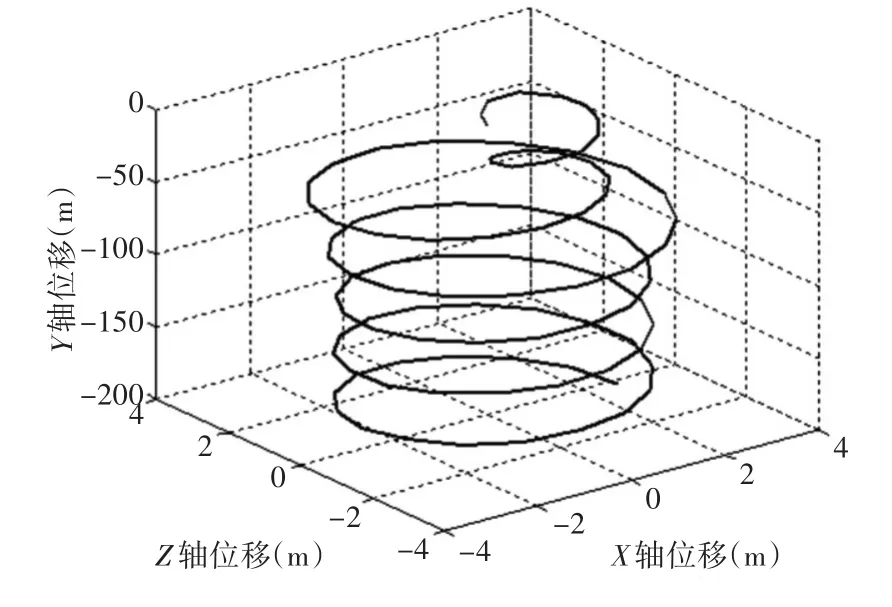
圖1 螺旋下潛姿態(tài)
由潛航體螺旋下潛的彈道仿真分析圖可以看出(圖1),由于初速度小等原因,潛航體在螺旋下潛之處會(huì)處于一個(gè)不穩(wěn)定的狀態(tài);隨著下潛到一定深度,速度穩(wěn)定,潛航體沿著一定的螺旋下潛半徑下潛。姿態(tài)也處于穩(wěn)定狀態(tài)。本文以6000m水深為假設(shè)條件,對潛航體螺旋下潛的過程進(jìn)行理論分析。
3 無動(dòng)力下潛理論分析
深海潛航器無動(dòng)力下潛的受力情況如圖2所示,潛航器艏部有一個(gè)重力壓載P,它是下潛的主動(dòng)因素,初始平衡條件下的潛航器正浮力,無動(dòng)力下潛時(shí)會(huì)有縱向速度u和垂向速度w,它們的合速度為U,經(jīng)過短時(shí)間的過渡過程,潛航器進(jìn)入穩(wěn)態(tài),其無動(dòng)力下潛的穩(wěn)態(tài)運(yùn)動(dòng)方程如下[6~9]。
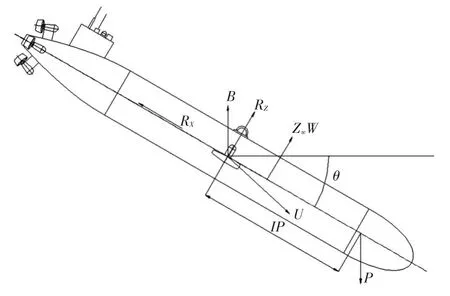
圖2 無動(dòng)力下潛受力圖
潛航器x方向:
其中θ為潛航器無動(dòng)力下潛縱傾角,而潛航器x方向的阻力的計(jì)算因子為
kX=0.5ρ·AX·CX=0.5×1025×0.608×0.18 =56.09kg/m
同理,潛航器z方向的力平衡方程為
(P-ΔB)·cosθ+Zww-ΔBcosθ-Rz=0
其中RZ=kZ·w2為潛航器垂向阻力,而z方向的阻力的計(jì)算因子為
kZ=0.5ρ·AZ·CZ=0.5×1025×5.57×0.76=2170kg/m
力矩方程為
-P·cosθ·LP+ΔB·hsinθ+Mww-mg·hsinθ=0
其中LP=2.475m為下潛壓載距離重心的縱向距離,m為潛航器水中總質(zhì)量,h為穩(wěn)性高,為浮心與重心之間的垂向距離。通過這三個(gè)方程就可以計(jì)算潛航器無動(dòng)力下潛的姿態(tài),如速度u、w、U,潛航器縱傾角θ、沖角α以及潛航器在大地坐標(biāo)系中的垂向下潛速度:
UZ=-usinθ+wcosθ
三個(gè)方程變量的解耦比較困難,計(jì)算中采用試算法,先預(yù)先假定潛航器的縱傾角θ,然后迭代計(jì)算各變量,編程計(jì)算很快可收斂得到結(jié)果,計(jì)算程序列表如表1、2。速度導(dǎo)數(shù)Z′w=-0.026,速度力矩導(dǎo)數(shù)M′w=0.008。
潛航器正浮力 ΔB=5kg、10kg和15kg,潛航器水中總質(zhì)量1200kg,無動(dòng)力下潛壓載的重量分別取為P=20kg、25kg和30kg,潛航器的穩(wěn)性高取h=0.025m,計(jì)算結(jié)果如表2所示。
從計(jì)算中可以看出,穩(wěn)性高不變下,下潛壓載重量越大,潛航器縱傾角和下潛速度越大。在下潛壓載重量不變情況下,潛航器正浮力越大,其垂向下潛速度變小,但差別不明顯,即正浮力對無動(dòng)力下潛速度的影響不明顯,在下潛壓載重量較大時(shí)更是如此。根據(jù)潛航器的設(shè)計(jì)情況,取下潛壓載重量為P=30kg,根據(jù)計(jì)算,潛航器的垂向下潛速度為0.72m/s,縱向速度為1.3m/s左右,縱傾角為28°左右(隨正浮力有輕微差別),潛航器無動(dòng)力下潛的速度和姿態(tài)較平穩(wěn)。
潛航器到達(dá)6000m所需時(shí)間為6000/0.72=8333s=2.3h,即2h 18min左右。
4 無動(dòng)力下潛水平回轉(zhuǎn)運(yùn)動(dòng)特性的分析
為了節(jié)省大深度條件下非工作過程(下潛和上浮)所需的能源和時(shí)間,深海潛航器采用無動(dòng)力大傾角下潛和上浮方式。為了在大深度下潛過程中,潛航器無動(dòng)力下潛到指定水域地點(diǎn)的海底,節(jié)省重新回到預(yù)定工作位置的時(shí)間和能源,潛航器采用與無動(dòng)力下潛壓載合一的回旋弧板(如圖3)的方法,來使?jié)摵狡髟跓o動(dòng)力下潛過程中做等效垂直的螺旋線運(yùn)動(dòng),使?jié)摵狡髟诤5椎墓ぷ鞯攸c(diǎn)就是水面的指定布放位置[10~13]。
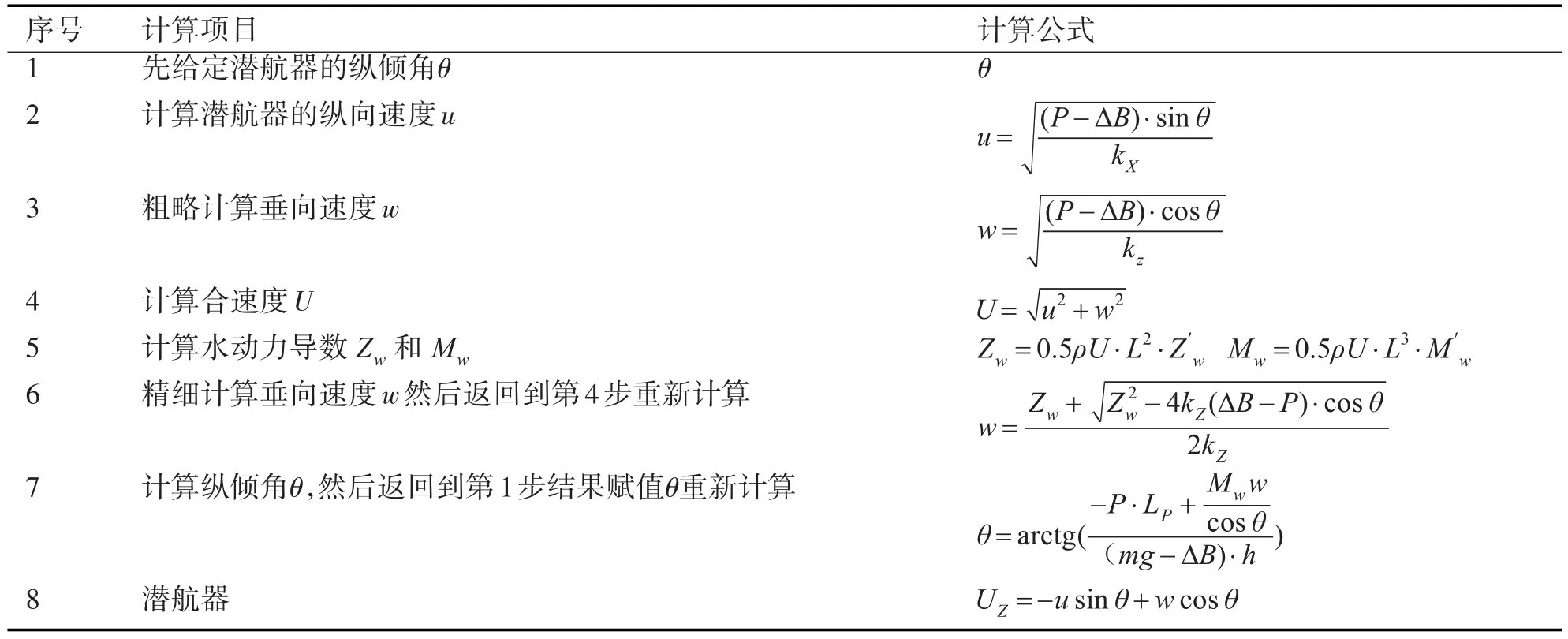
表1 潛航器無動(dòng)力下潛計(jì)算表

表2 潛航器無動(dòng)力下潛計(jì)算結(jié)果
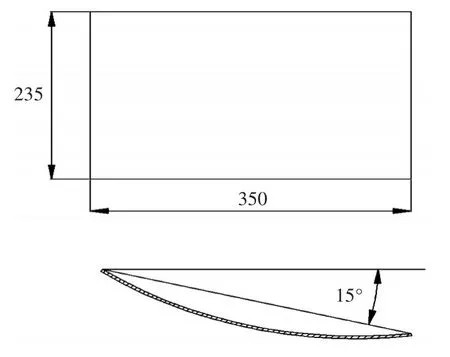
圖3 弧板尺寸
如圖4所示,在下潛壓載上連接一個(gè)弧板,該弧板伸出到潛航器外,當(dāng)潛航器無動(dòng)力下潛時(shí),潛航器縱向速度與弧板之間的攻角為15°,該攻角將會(huì)在弧板上產(chǎn)生一個(gè)側(cè)向升力,該側(cè)向力將會(huì)使?jié)摵狡髯鰺o動(dòng)力回轉(zhuǎn)運(yùn)動(dòng),配合無動(dòng)力下潛運(yùn)動(dòng),潛航器就會(huì)產(chǎn)生垂向的螺旋線運(yùn)動(dòng)。
潛航器無動(dòng)力定常回轉(zhuǎn)(左回旋)的線性運(yùn)動(dòng)方程如下:
Yv·v+Yr·r+YP=mUrNv·v+Nr·r+LP·YP=0
整理可得:
Yv·v+(Yr-mU)·r=-YPNv·v+Nr·r=-LP·YP


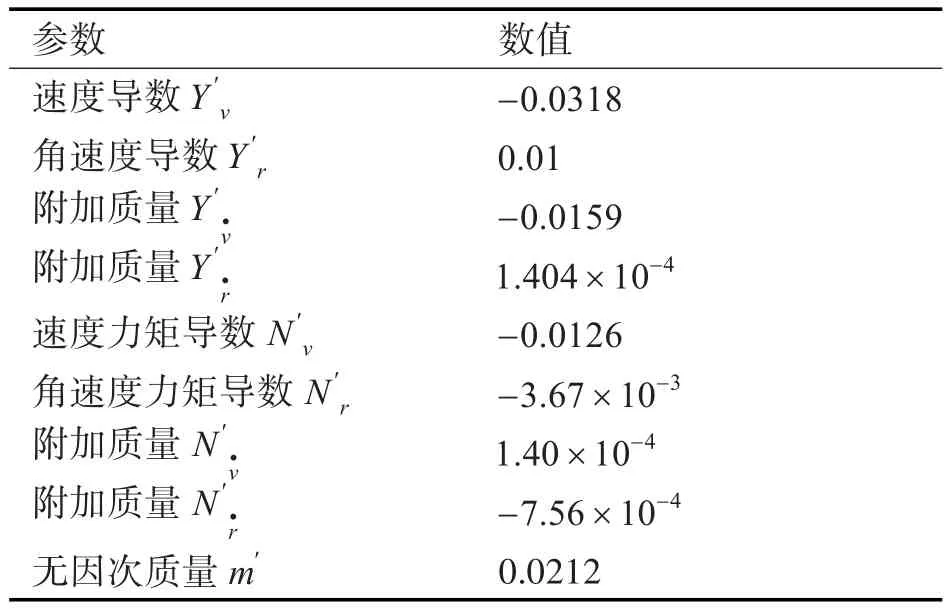
表3 水平面運(yùn)動(dòng)方程相關(guān)參數(shù)
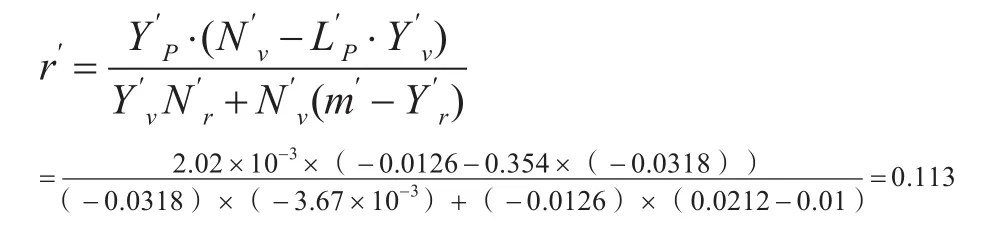
將表3中相關(guān)參數(shù)帶入計(jì)算,線性條件下潛航器的無因次回轉(zhuǎn)角速度為
D=62×L=17.7×7=124m

5 結(jié)語
1)潛航體在螺旋下潛過程之處,處于一個(gè)不穩(wěn)定狀態(tài)。由于初速度低,側(cè)推力小的緣故,運(yùn)動(dòng)軌跡會(huì)呈現(xiàn)雜亂現(xiàn)象;當(dāng)下潛到一定深度時(shí)候,下潛速度穩(wěn)定,側(cè)推力所引起的螺旋運(yùn)動(dòng)規(guī)律也會(huì)穩(wěn)定,使得潛航體下潛軌跡穩(wěn)定。
2)潛航體穩(wěn)性高不變情況下,下潛壓載重量越大,潛航器縱傾角和下潛速度越大。在下潛壓載重量不變情況下,潛航器正浮力越大,其垂向下潛速度變小,但差別也不明顯,即正浮力對無動(dòng)力下潛速度影響不明顯,在下潛壓載重量較大時(shí)候更是如此。
3)側(cè)推力決定了螺旋下潛的速度以及回轉(zhuǎn)半徑,側(cè)推力與弧板的表面積近似為正比例關(guān)系,但同時(shí)也由弧板與潛航體中軸線的偏轉(zhuǎn)夾腳有關(guān)系。同時(shí)側(cè)推力大小也影響了下潛速度,并導(dǎo)致下潛至預(yù)定深度的時(shí)間。通過上面的理論公式分析,可以對不同總體配置進(jìn)行計(jì)算,并選出最優(yōu)化的方案。
