結球葉菜收獲機械關鍵技術與裝備研究現狀
2019-06-22 08:03:42韓長杰
新疆農機化 2019年2期
張 靜,韓長杰,郭 輝,徐 陽,周 軍
(新疆農業大學機電工程學院,新疆烏魯木齊830052)
0 引言
結球葉菜是葉菜的一種,其收獲機械的典型代表是甘藍收獲機械,將植株從土壤中拔出后向后傳送,最后完成根莖的切除、剝葉、收集等工序。關鍵部件主要包括拔取和輸送裝置、莖部切割裝置及剝葉裝置等。自1931年前蘇聯成功研制出了第一臺甘藍收獲機以來,國外許多國家都展開了對結球葉菜收獲機械的研究工作。經過近80年的發展研究,俄羅斯、日本、美國等國家和地區已經投入實際生產,國內對蔬菜收獲機械的研究,尤其是結球葉菜收獲機械仍處于理論研究和試驗階段。本文重點分析了甘藍收獲機、大白菜收獲機等結球葉菜收獲機械關鍵部件的研究進展,為今后結球葉菜機械化收獲裝備的研發提供參考。
1 拔取輸送裝置研究現狀
1.1 拔取裝置
在蔬菜的整個機械化收獲工藝過程中,蔬菜的拔取是第一步,其拔取裝置主要用于將結球葉菜等整顆植株連根拔取,隨后,通過輸送提升裝置提升和輸送蔬菜,因此拔取的作業質量直接關系到后續各個環節的作業效果[1]。目前,最常見的拔取裝置形式有鏈條式、鏟式、螺旋錐式和圓盤式4種。以上4種類型拔取裝置均通過1對反向運轉的部件作用于結球葉菜底部和根莖部,引導結球葉菜至輸送提升裝置,主要結構特點如表1。
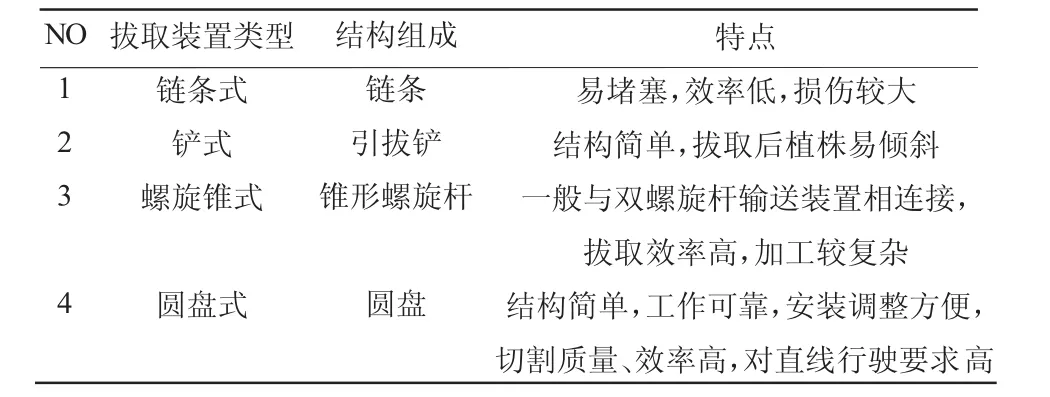
表1 四種拔取裝置的結構特點
1.1.1 鏈條式
世界上第一臺由前蘇聯在1931年開發的甘藍收獲機采用左右回轉鏈條結構提取甘藍,鏈條的內側由彈簧壓緊,兩組拔取器分別固定在刮板式輸送器的兩端,當鏈條工作時,鏈條拉住甘藍的根部將其拔出土壤,但田間試驗證明該鏈條式拔取器工作時受甘藍尺寸和根莖位置影響較大,對于根莖較低的甘藍,拔取裝置很難達到根莖處,且易落入鏈條內阻礙鏈條正常回轉運動,導致甘藍堵塞和堆積,因此在后續的甘藍收獲機械研究中很少見到鏈條式結構[2]。
1.1.2 鏟式
浙江大學研制了一種適合我國南方種植模式的單行自走式甘藍收獲機械,采用了可彈性浮動的撥輪配套鏟式拔取裝置作業,拔取效果較好,對甘藍的損害較小[3](圖1)。
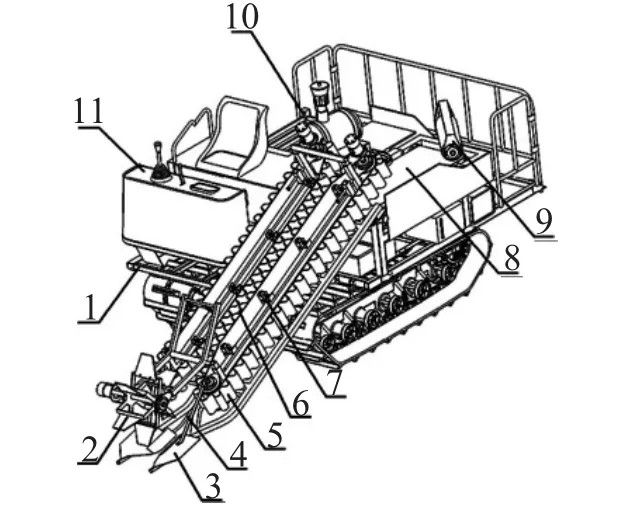
圖1 自走式甘藍收獲機
1.1.3 螺旋錐式
在國外,日本開發的手扶自走式大白菜收獲機使用螺旋提取器和彈性夾帶完成拔取過程[4](圖2)。美國北卡羅來納州研制的一種背負式結球甘藍收獲機(圖3)采用導向椎體配合螺旋輸送帶進行甘藍拔取輸送,配套采用了液壓傳動機構[5]。美國Kobuchi等設計的甘藍收獲機也使用了雙螺旋拔取桿,使用引導輪作為輔助拔取裝置,有效提高了拔取輸送的效果與效率,降低了因堵塞引起的故障率[6]。
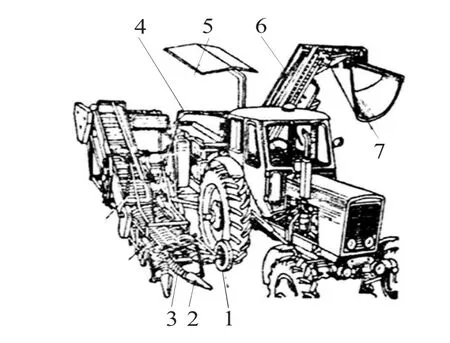
圖3 甘藍聯合收獲機
在國內,甘肅農業大學研究設計的4YB-1型甘藍收獲機采用螺旋錐式引拔收集機構對甘藍進行對行扶正,利用其椎體結構引導甘藍向上運動,最終拔起甘藍[7,8](圖4)。
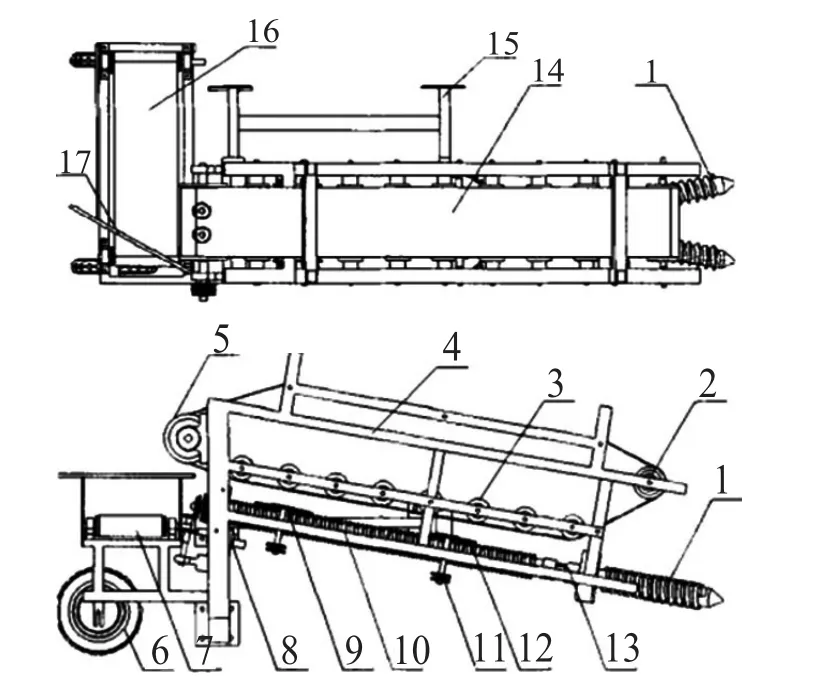
圖4 4Y-I型甘藍收獲機
中國農業大學徐麗明等人設計的一種大白菜收獲機同樣采取了雙螺旋拔取裝置,并進行了大白菜根部物理特性的研究和拔取力測試試驗,采用四個測力計測定整株大白菜完整的從土壤里拔取出來時需要的力,結果表明拔取力隨著根部直徑的增大而逐漸增大,大白菜根部直徑約 30~35 mm,拔取力約 330~350 N[6]。
此外,北京工業大學高國華等人基于能量平衡理論對生菜拉拔切割過程力學性能分析,研究表明拉拔力有利于減小生菜切割階段的切割力,但是過大的拉力往往會導致切割斷裂截面不均勻,收獲效果不佳[9]。
1.1.4 圓盤式
國外,美國Shepardson等人研發的甘藍收獲機采用了雙圓盤的結構,實現甘藍的拔取,最終由切割圓盤完成根部的切除,適用任何現場條件及任何卷心菜作物品種,一次收獲切割率高達80%,1970年紐約加工的一半通過這種方法收獲,但未實現商業化生產(圖5)。2000年日本研制了一種聯合甘藍聯合收獲機能夠實現單行種植甘藍的一次性收獲、收集和裝箱,同樣采用了旋轉式雙圓盤根莖引拔裝置,通過輸送裝置將甘藍運送至切割裝置處,由圓盤割刀一次完成甘藍根部和頭部外包葉的切斷,收獲效率達0.3 hm2/h。意大利Hortech公司的RAPIDSR型四行自走式甘藍聯合收獲機采用圓盤割刀切割蔬菜根部進行拔取,蔬菜通過兩條傾斜的傳送帶運送到后部清潔平臺由人工進行清選裝箱。
美國Hachiya等建立了一套適合大規模作業系統的甘藍收獲方法,無須中斷作業,為后續的機械化收獲應用提供了一種新的思路。其采用的是一種旋轉式雙圓盤的拔取裝置,后續工人配合手工去葉、裝箱一體化甘藍收獲機,已于2001年底實現商業化[10](圖 6)。

圖5 甘藍收獲機
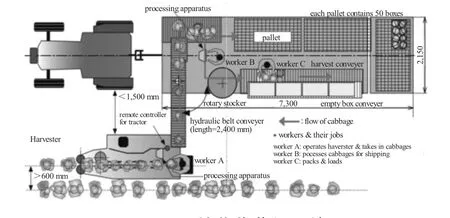
圖6 甘藍收獲機系統
此外,2017年11月30日,日本Yanmar和Osada Nouki基于已經開發的卷心菜收割機,共同研制了一種大白菜收獲(圖7),其結構與卷心菜收割機類似,同樣采用了圓盤式一體拔取切割裝置,但在大白菜輸送到載體時,葉子容易損壞擦傷,關于該種大白菜收獲機的其它相關信息尚未見報道。

圖7 自走式大白菜收獲機
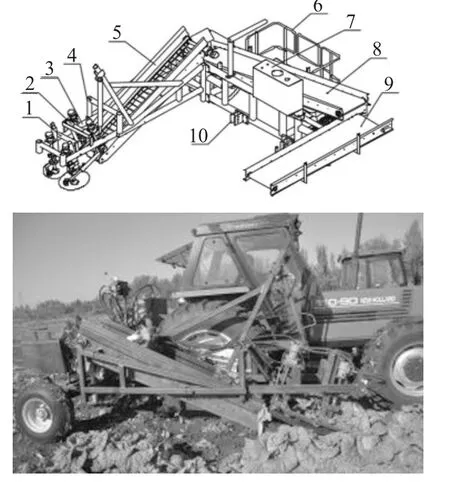
圖8 大白菜收獲機
國內,哈爾濱市農業科學院研制的背負式大白菜收獲機(圖8)采用一對斜置安裝的切口圓盤對白菜進行先切根后拔取,由于圓盤弧面與地面接觸以限制深度,對白菜根部切削長度較一致[11]。
綜上所述,目前以上4種拔取裝置形式除鏈條式拔取裝置外,其余3種在國內外甘藍收獲機械方面都有普遍應用,并且都配套了相應的撥入裝置。拔取裝置的選擇一方面取決于土壤類型,另一方面取決于植株的特性。現有研制的大白菜收獲機械方面大都采用了雙圓盤式結構,其余形式拔取結構尚未查到相關文獻,雖然已有文獻對結球葉菜根部力學特性開展了研究,但對結球葉菜葉子的相關特性未展開相關研究。
1.2 輸送提升裝置
輸送作業是蔬菜機械化收獲的重要環節之一,輸送提升裝置在完成輸送蔬菜的同時,還必須夾持固定住植株以協助完成切根操作,且必須克服蔬菜本身重力,利用摩擦有效地防止蔬菜在升運過程中滾動[12]。目前,常見的輸送提升裝置主要有三種結構:螺旋升運式、輸送帶式和輸送鏈式。
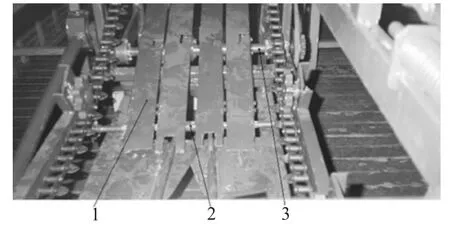
圖9 甘藍輸送結構
國外,俄羅斯NinaToncheva等人對甘藍傳送輸送裝置(圖9、10)進行了試驗優化,得到了較優的輸送裝置偏心曲軸角速度(0.105 rad/s),葉片夾緊和間隙之間的間隙(70mm)和甘藍收獲機的工作速度(1.17m/s)[13]。
在國內,浙江大學設計的履帶自走式甘藍收獲機采用圓弧形PVC材料凹槽輸送提升裝置,鋸齒式輸送鏈夾持甘藍根部用于同步輸送,實現甘藍植株的輸送、夾持和固定等功能,雙橫向傳送帶的夾緊距離可通過間距調節機構手動調節,以適應不同品種甘藍的差異[14]。中國農業大學設計的大白菜收獲機采用了螺旋升運裝置配合夾持裝置使大白菜平穩輸送。
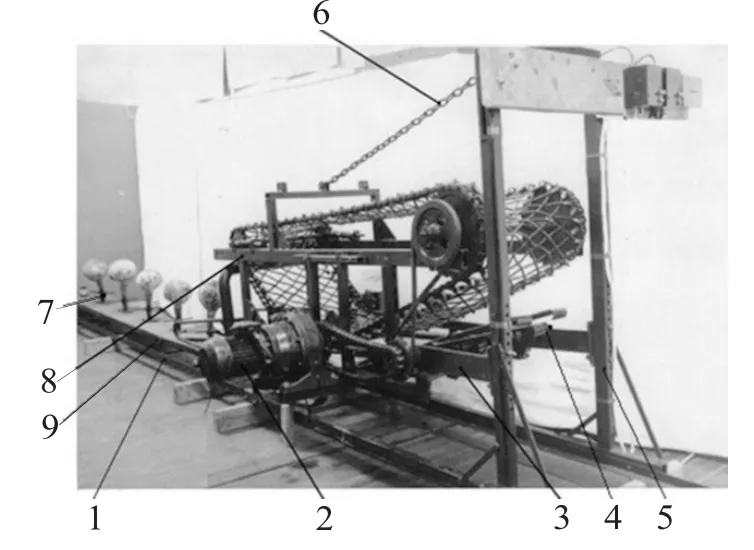
圖10 試驗裝置
由哈爾濱市農業科學院李向軍等研發的背負式大白菜收獲機采用凸凹條形輸送鏈(圖11),中間凹條均勻分布,有效防止大白菜在提升過程中滾落。
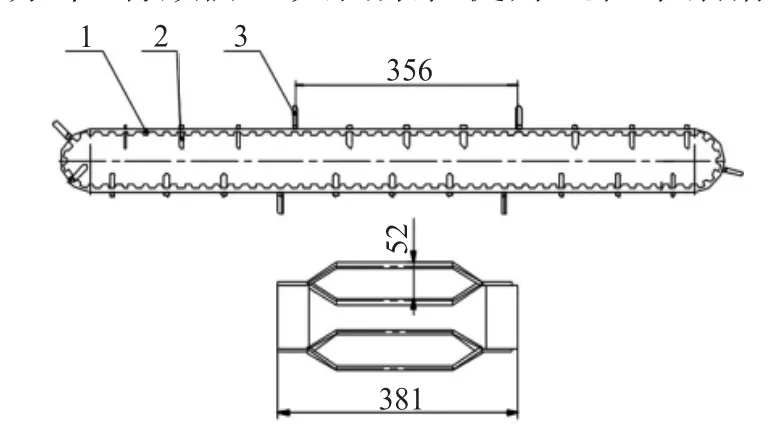
圖11 升運鏈結構
在拔取裝置和輸送裝置之間,部分裝置采用了夾持導向和壓頂裝置,主要目的也是為了配合升運裝置一起,將植株平穩輸送到隨后的剝離、切根及其它工序。現有夾持導向和壓頂裝置主要采用不同形式和材質的皮帶水平或豎直方向平行放置進行夾持輸送。例如國外大都采用專用一體式皮帶進行輸送導向同時可以完成初步剝葉等工序,輸送效率高,但制造成本較高,適應性比較差(圖12)。

圖12 國外輸送導向一體式甘藍收獲機
國內,黑龍江哈爾濱市農業科學院使用兩條高密度柔性皮帶(圖13)夾持,由于白菜質量大,并且在收獲過程中白菜葉不可避免地落入夾持主動輪和皮帶中間,經擠壓之后滲出大量水分,導致收獲時皮帶容易打滑而脫落,在皮帶中間位置加裝齒狀C型帶,不僅可以導向,防止皮帶垂直下落,還能強制驅動皮帶防止打滑。其它類似夾持機構的結構如圖14[15]。
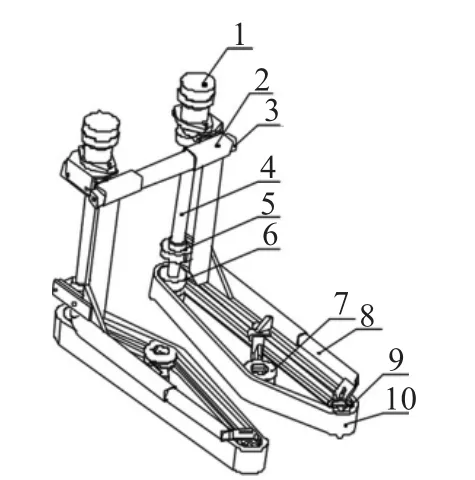
圖13 夾持機構結構示意圖
綜上,不同輸送提升裝置都涉及到輸送傾角、傳輸速度等關鍵參數。研究數據表明,當傳輸帶寬一定時,輸送量越大,帶速越低,特別是對于傾角較大的輸送裝置,而對于行駛速度的影響不太明顯。由于甘藍、大白菜質量較小,輸送機構的功率消耗較小,輸送機構的功率主要消耗在植株運輸及滾筒自身轉動上,在設計時還要著重考慮如何將切下的根莖快速排出,防止纏繞堵塞。國內大都采用了夾持導向機構,在設計時要根據結球葉菜大小調節夾持皮帶的距離,避免夾持破碎。
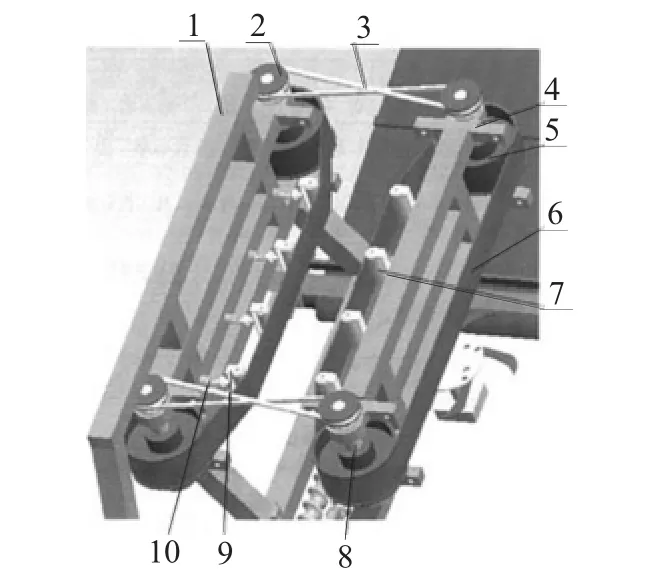
圖14 夾持裝置結構
2 切根裝置研究現狀
切根裝置是結球葉菜收獲機作業的關鍵部件之一,與輸送提升裝置協同作業,主要目的是切除結球葉菜根,保證凈菜向后輸送。切根質量的好壞直接影響后續的剝葉質量,決定著整個收獲機的作業性能,現有結球葉菜收獲機大多采用先拔取后切根的方式進行收獲,但切根裝置的形式有所差異。國內在借鑒國外相關研究的基礎上,主要采用了鋸齒式雙圓盤切割結構為主。
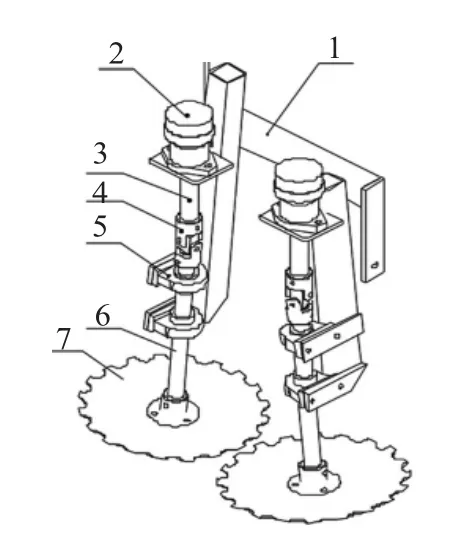
圖15 切割機構示意
例如,哈爾濱市農業科學院采用先切割后拔取的方式來收獲大白菜,其切割機構(圖15)的動力來源于2個液壓馬達,工作時高速旋轉的馬達驅動切割盤進行切割作業,切割盤采用2個缺口圓盤(直徑350 mm,曲率半徑600 mm,厚度3 mm),圓盤夾角可通過萬向節安裝調整,以滿足根部切割位置的要求[11]。中國農業大學設計的圓盤刀(圖16)通過5把直刀片固定安裝在刀盤上,構成圓盤切割器,并通過對割刀的運動學分析得出適宜的刀軸轉速為68.57 r/min。通過對鋸齒圓盤刀片的模態分析,浙江大學得出甘藍根莖部適宜轉速為500 r/min,并結合切割試驗,以切割力大小為考察指標,研究得出單點夾持情況下低速向下削切時切割力最小,其較佳的切割區域為30~35 mm處,為甘藍收獲機切割器的設計與改進提供了理論依據[16]。
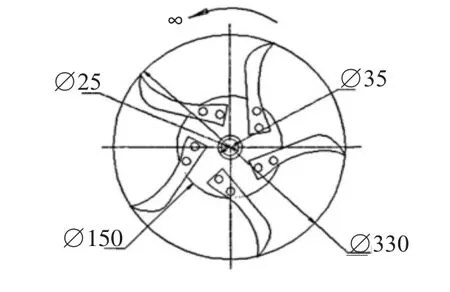
圖16 切割圓盤
綜上,結球葉菜在切根時一方面要保證較好的切割質量和效果,不產生劈裂等切割損傷;另一方面要減少功率和阻耗,防止纏繞堵塞,確保切割圓盤的正常工作。目前已有切根裝置切割高度固定不可調,在后面的研究中可考慮采用可調角度或高度式切割機構,確保切割時在最佳切根區域。此外,相關研究資料表明,在相同工作條件下,直線刀的切割功耗最小,星齒刀的切割功耗最高,因此需要選擇合適的刃口和切割刀材質,以平衡刃角過小導致圓盤刀剛度降低的問題。
3 國內外剝葉裝置研究現狀
剝葉裝置的主要目的是去除已被切根裝置切斷后部分結球葉菜的外包老葉,且必須確保葉片表面不被損壞。現階段,國內外對于甘藍的剝葉裝置(圖17)比較成熟,主要通過液壓馬達驅動剝葉輥,在高速旋轉下對甘藍外葉進行剝離,同時引導剝離后的甘藍進入后續輸送裝箱過程[17]。但由于大白菜葉子比較脆弱,易碰傷,現階段對大白菜的剝葉仍然以手工配合為主。
圖17 剝葉裝置結構
國外Josie Hughes等人在現有機械式剝葉裝置的基礎上研發了一種自動剝葉系統,其結合機器視覺技術,利用適宜的空氣吸力去除甘藍葉片,經過試驗測試,為今后機器人自動識別剝葉技術提供了一種新方法[18]。
4 存在的問題及建議
4.1 存在的問題
4.1.1 生產栽培模式不規范制約機械化收獲和推廣
我國結球葉菜的種類繁多,種植分布廣泛,且多為農戶小規模種植。不同種植地區結球葉菜的種植行距、株距等相應的參數變化范圍也非常大,由此給收獲機械的設計帶來了很大的困難[19]。當前研究人員局限于研究某一特定的品種進行研究,導致收獲機械的通用性不強,農戶經濟水平相對較低,對制造成本較高的收獲裝備購買力差,以上因素阻礙了收獲機械化的推廣。
4.1.2 薄弱環節和關鍵技術研發水平滯后影響機械化水平
在日本等發達國家,結球類蔬菜種植不僅在整個生產過程實現了機械化,而且已朝著通用高效、智能化收獲等方向發展。目前,在我國蔬菜機械化生產過程中,蔬菜機械化耕作、移栽、灌溉和植保等技術得到不斷發展,但整體機械化水平較低,收獲環節成為限制蔬菜全程機械化生產的瓶頸。現有收獲裝備自適應差、通用性差、損傷較高,亟需突破薄弱環節和關鍵技術問題,以降低機械化收獲損傷,實現高效收獲。
4.2 建議
為解決結球類葉菜機械化收獲問題,首先要對結球類蔬菜的生物力學特性和收獲機理開展深入研究,探討自動仿形技術、變位切割技術、柔性喂入技術等共性技術,為關鍵部件的研發設計提供理論基礎;其次,要注重農機與農藝的緊密融合,進一步規范葉類蔬菜的種植農藝,制定完善的機械化生產種植模式和體系以保障生產、收獲等各環節機具的配套使用,提高收獲機械的利用率和通用性。同時進一步加強機電一體化技術和智能技術在機械化收獲中的融合應用,實現收獲機械的自動對行、智能化選擇性收獲、在線稱重及品質檢測分級、蔬菜溯源保鮮等,以提高裝備的智能化水平、自適應性、通用性和市場化需求性。