基于多傳感器與多維空間的故障分類(lèi)方法
2019-06-13 03:12:12文成林
自動(dòng)化與儀表 2019年5期
何 永,文成林
(杭州電子科技大學(xué) 自動(dòng)化學(xué)院,杭州310018)
從旋轉(zhuǎn)機(jī)械系統(tǒng)中采集到最常見(jiàn)的是一維振動(dòng)信號(hào),通常采用小波變換和神經(jīng)網(wǎng)絡(luò)等方法進(jìn)行時(shí)域頻域分析。小波變換只是對(duì)信號(hào)的低頻部分進(jìn)行處理,這對(duì)于頻域分析來(lái)說(shuō)是不均衡的。BP 神經(jīng)網(wǎng)絡(luò)存在著學(xué)習(xí)速度慢且易陷入局部極小值等不足。
對(duì)于多維信號(hào),常用多元統(tǒng)計(jì)方法對(duì)其進(jìn)行分析。在多維信號(hào)每一維向量中,每個(gè)分量在時(shí)間上是常相關(guān)的,但對(duì)于同一時(shí)刻,由于各分量之間對(duì)應(yīng)不同的物理量,相關(guān)性有強(qiáng)有弱,具有不確定性,多數(shù)表現(xiàn)為弱相關(guān)。振動(dòng)信號(hào)采樣存在固有的周期性, 因此適合利用多變量統(tǒng)計(jì)方法來(lái)處理這類(lèi)信號(hào)。同一個(gè)周期內(nèi)每一個(gè)采樣點(diǎn)對(duì)應(yīng)著對(duì)象相對(duì)位置的物理特性,因此同一個(gè)周期內(nèi)的每個(gè)采樣點(diǎn)僅與相鄰的少數(shù)幾個(gè)采樣點(diǎn)有較強(qiáng)的相關(guān)性,而與距離較遠(yuǎn)的采樣點(diǎn)相關(guān)性會(huì)逐漸減弱。而不同周期內(nèi)的相同采樣點(diǎn)之間因?qū)?yīng)著同一物理位置的采樣,其在時(shí)間上具有長(zhǎng)時(shí)間相關(guān)性。因此,若把單個(gè)周期改為多維變量, 進(jìn)而用多變量統(tǒng)計(jì)分析的方法,將會(huì)取得更好的故障診斷結(jié)果[1-4]。故在此建立一種基于多維空間時(shí)域特征值向量的故障分類(lèi)方法。
1 算法描述
1.1 方法概述
在此所提出的基于時(shí)域振動(dòng)信號(hào)在多維空間中的故障分類(lèi)方法,一方面能夠利用一維信號(hào)的周期特性,借助于成熟的基于多元統(tǒng)計(jì)分析的故障診斷方法。另一方面還可以將不同傳感器采集的數(shù)據(jù)的特征進(jìn)行組合得到多維向量,利用數(shù)學(xué)中的多維空間進(jìn)行處理。多維向量在對(duì)應(yīng)的多維空間中代表一個(gè)點(diǎn),此處定義多維向量所在的多維空間為特征空間。
首先,將不同傳感器采集的振動(dòng)信號(hào)按照旋轉(zhuǎn)機(jī)械的周期改寫(xiě)為矩陣形式,并求出該矩陣協(xié)方差陣的特征值,再將通過(guò)不同傳感器計(jì)算的特征值組合,得到整個(gè)原始數(shù)據(jù)的特征值向量。其次,利用多維空間中不同向量代表不同的點(diǎn)也即代表不同的數(shù)據(jù),對(duì)點(diǎn)進(jìn)行劃分以識(shí)別點(diǎn)對(duì)應(yīng)的數(shù)據(jù)是屬于哪一類(lèi)故障。
1.2 信號(hào)預(yù)處理
對(duì)于一類(lèi)源于旋轉(zhuǎn)機(jī)械系統(tǒng)的振動(dòng)信號(hào)序列組,如柴油機(jī)和軸承系統(tǒng)等

將旋轉(zhuǎn)機(jī)械在第j 個(gè)傳感器一個(gè)周期內(nèi)的采樣信號(hào)表示為向量,如其中r 為一個(gè)周期內(nèi)的采樣點(diǎn)個(gè)數(shù)。則多個(gè)周期內(nèi)采樣信號(hào)的矩陣形式為
其中

通常情況下,總的樣本點(diǎn)數(shù)L 為r 的整數(shù)倍,否則可以對(duì)其進(jìn)行截?cái)嗷蛘哐a(bǔ)位處理。
令


則將多個(gè)傳感器采樣得到的原始數(shù)據(jù)特征值記為

1.3 故障特征范圍的確定
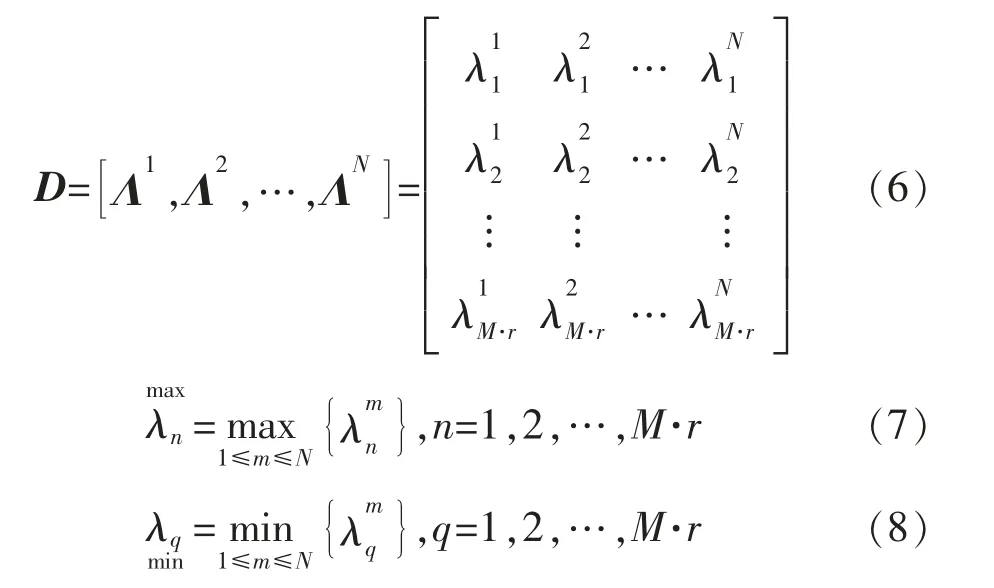
記特征值矩陣為D,即
1.4 多維空間中的算法描述
在經(jīng)典的三維空間中,2 個(gè)立體范圍有無(wú)重疊,可以通過(guò)2 個(gè)立體邊界有無(wú)重疊進(jìn)行判斷。比如,在三維空間中有2 個(gè)立方體,可以確定這2 個(gè)立方體各個(gè)頂點(diǎn)的坐標(biāo),并按緯度確定不同維度上的最大值和最小值,分別得到2 個(gè)立方體的2 個(gè)向量也即空間里的2 個(gè)點(diǎn),此時(shí)立方體必然包含在對(duì)應(yīng)的2 個(gè)空間點(diǎn)組合得到的空間里面。因此,就可以通過(guò)2 個(gè)空間點(diǎn)組合得到的空間來(lái)近似地表示該立方體,進(jìn)而再確定2 個(gè)立方體是否重疊。如果是在多維空間,也可以通過(guò)類(lèi)似的方法進(jìn)行判斷。具體的算法如下:
上述已經(jīng)求得故障特征向量所在特征空間,并且對(duì)于訓(xùn)練數(shù)據(jù)來(lái)說(shuō),已經(jīng)求得了特征空間中的范圍。在此必需認(rèn)識(shí)到,特征值向量上界和下界只是取前組數(shù)據(jù)對(duì)應(yīng)特征向量同維度下的最大值和最小值,因?yàn)橥暥认碌淖畲笾岛妥钚≈狄呀?jīng)具有一定的冗余,不必再進(jìn)行加權(quán)。當(dāng)有新的故障數(shù)據(jù)時(shí),計(jì)算新數(shù)據(jù)的特征向量記為

將Λ 與各個(gè)訓(xùn)練數(shù)據(jù)計(jì)算得到的特征值向量上界和下界進(jìn)行比較,判斷Λ 代表的點(diǎn)屬于哪一類(lèi)故障。記
對(duì)M1和M0的不同緯度值進(jìn)行以下處理:
記
為盡可能減少誤報(bào),在此考慮用故障類(lèi)型范圍外的確定緯度所占總緯度的比例,而在數(shù)據(jù)處理初期就已經(jīng)確定了特征空間,也即確定了總的緯度數(shù),所以只需要計(jì)算故障類(lèi)型范圍外的確定緯度數(shù)。新數(shù)據(jù)的特征值向量與訓(xùn)練得到的所有類(lèi)型故障的特征值向量的上下界進(jìn)行比較,計(jì)算確定緯度數(shù)。最終找出確定緯度數(shù)最小的那一類(lèi),即測(cè)試數(shù)據(jù)屬于該類(lèi)故障。
2 仿真試驗(yàn)
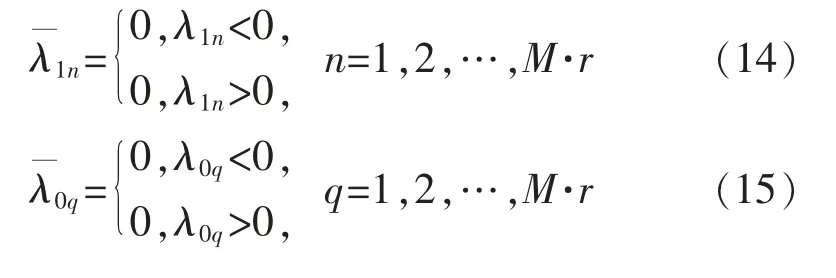
試驗(yàn)在ZHS-2 型多功能電機(jī)柔性轉(zhuǎn)子試驗(yàn)臺(tái)上進(jìn)行,試驗(yàn)臺(tái)如圖1所示。使用8 個(gè)安裝在轉(zhuǎn)子支撐座的水平和垂直方向傳感器采集轉(zhuǎn)子時(shí)域振動(dòng)信號(hào),經(jīng)HG8902 采集箱將信號(hào)傳輸至上位機(jī)。
圖1 ZHS-2 試驗(yàn)臺(tái)Fig.1 ZHS-2 experiment platform
在試驗(yàn)臺(tái)上模擬5 類(lèi)情形:2 組轉(zhuǎn)子不平衡,分別模擬發(fā)動(dòng)機(jī)安裝軸心存在偏差 (bph1,bph2);基座松動(dòng) (jzsd) 用以模擬發(fā)動(dòng)機(jī)固定出現(xiàn)松曠的現(xiàn)象;風(fēng)機(jī)斷葉(fjdy)模擬發(fā)動(dòng)機(jī)內(nèi)部散熱部分故障;還有正常(zc)情況。
在該電機(jī)轉(zhuǎn)子系統(tǒng)中,因故障引發(fā)的異常振動(dòng)均可以通過(guò)傳感器采集的振動(dòng)信號(hào)反映出來(lái),但其振動(dòng)幅值與正常情況下相比, 會(huì)發(fā)生一定的變化。電機(jī)轉(zhuǎn)子轉(zhuǎn)速為1500 r/min,傳感器的系統(tǒng)誤差根據(jù)其生產(chǎn)廠商提供的精度設(shè)定為±1%。在每一類(lèi)模擬的狀態(tài)下, 每8 s 采集1 次, 連續(xù)采集300 組樣本, 每組樣本包含8 個(gè)傳感器大約每隔0.0008 s 測(cè)得的10240 組數(shù)據(jù)。
對(duì)5 類(lèi)模式分別采集300 組樣本, 共1500 組樣本, 每組樣本又包含8 個(gè)傳感器在8 s 內(nèi)采集的10240 個(gè)數(shù)據(jù)。
MatLab 仿真流程如下:
步驟1對(duì)采集到的5 類(lèi)模擬狀態(tài)的信號(hào)進(jìn)行改寫(xiě)。由于每一組數(shù)據(jù)都包含8 個(gè)采樣器采集到的信號(hào),所以將每一個(gè)傳感器采集到的信號(hào)都改寫(xiě)為矩陣形式,并求其協(xié)方差矩陣的特征值。之后,將這8 個(gè)采樣器信號(hào)得到的特征值進(jìn)行組合, 得到該組數(shù)據(jù)的特征值。其余的數(shù)據(jù)也都經(jīng)過(guò)上述過(guò)程的處理。由此,可以得到5 類(lèi)模擬狀態(tài)信號(hào)的特征值信息共1500 組,每一類(lèi)特征值信息300 組。
步驟2在多維空間中求每類(lèi)故障信號(hào)的范圍。從1500 組數(shù)據(jù)中,取出1200 組即每一類(lèi)取出240 組數(shù)據(jù)作為訓(xùn)練集;剩余的數(shù)據(jù)作為測(cè)試集,對(duì)該算法進(jìn)行檢驗(yàn)。
在ZHS-2 型多功能電機(jī)柔性轉(zhuǎn)子試驗(yàn)臺(tái)的參數(shù)設(shè)置中,電極轉(zhuǎn)速1500 r/min,傳感器的采樣頻率為1250 Hz。在此,將每一類(lèi)故障中每組數(shù)據(jù)的每一維按照8 個(gè)一列進(jìn)行改寫(xiě),求其協(xié)方差矩陣的特征值得到8×1 的列向量;對(duì)剩余數(shù)據(jù)進(jìn)行改寫(xiě)并求得特征值,將這些特征值組合就得到64×1 的特征值向量。
采用訓(xùn)練數(shù)據(jù)集,求得每類(lèi)故障的特征值向量上界、下界,具體如下:(在此僅列出zc 數(shù)據(jù)組的特征值向量的上界和下界)
——zc 下界
[0.100154267 0.134582489 0.166101508 0.177042959 0.228974162 0.384610576 1.116704969 1.319367845 0.00318868 0.004038795 0.007728744 0.020103555 0.041809797 0.109435261 0.54029 0.835868629 0.017141043 0.01978346 0.049357662 0.062530949 0.100212005 0.131221285 0.146126738 0.156507026 0.153723893 0.294725829 0.403403747 0.436137097 0.474712989 0.590664575 0.974235777 1.07381792 0.195547269 0.226667017 0.282622982 0.324774592 0.355757965 0.387167798 0.457753782 0.499536213 0.040886284 0.05371101 0.093297683 0.107692576 0.181744494 0.381511166 1.250583917 1.430294285 0.047673472 0.049508868 0.055514249 0.058357037 0.078694955 0.110201999 0.192621773 0.219105292 0.188939802 0.210286684 0.227462086 0.252252902 0.29915077 0.318562574 0.412347111 0.459199602]
——zc 上界
[0.143413726 0.186103212 0.246980944 0.26012841 0.322606346 0.485243975 1.616306057 1.76071132 0.005461577 0.006311695 0.01080902 0.026212013 0.063021279 0.151904669 0.78067465 1.060943405 0.031386872 0.036323337 0.075249216 0.081445697 0.138489132 0.173517795 0.219050625 0.229191164 0.242194784 0.377493858 0.535144882 0.561925464 0.755551398 0.873865535 2.079954023 2.460502343 0.259552593 0.283669439 0.416612664 0.441123654 0.518314572 0.630062593 0.799752266 0.847673147 0.076274089 0.090765358 0.127444601 0.169640085 0.256782017 0.531581301 1.64080054 1.771292796 0.06857132 0.072658588 0.102733276 0.110148081 0.117376754 0.155194337 0.247138493 0.293334353 0.247402307 0.274133138 0.318106126 0.382089258 0.514013708 0.548489507 0.608847299 0.689615508]
將測(cè)試數(shù)據(jù)的特征值與訓(xùn)練數(shù)據(jù)得到的特征值的上下界進(jìn)行比較, 并按照算法確定出緯度數(shù),得到300 組測(cè)試 (每一類(lèi)模式60 組測(cè)試數(shù)據(jù)),其結(jié)果見(jiàn)表1。
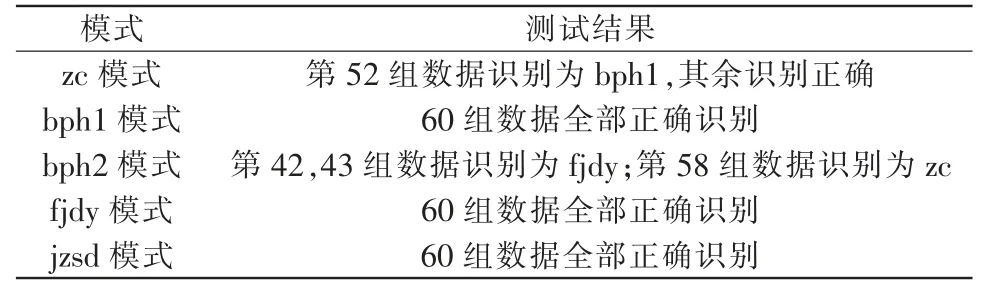
表1 試驗(yàn)結(jié)果統(tǒng)計(jì)Tab.1 Experimental result statistics
由表可知,在所有300 組測(cè)試數(shù)據(jù)中,誤報(bào)率為1.33%,正確識(shí)別率為98.67%,能夠較好地識(shí)別各類(lèi)故障。
3 結(jié)語(yǔ)
所提出的基于多傳感器采集數(shù)據(jù)在多維空間中的故障分類(lèi)算法,仿真結(jié)果表明該算法能夠較好地識(shí)別分類(lèi)故障。然而,該方法尚有不足之處,該算法中通過(guò)最小確定緯度數(shù)進(jìn)行分類(lèi),但是每一個(gè)緯度對(duì)于每一組數(shù)據(jù)屬于哪一類(lèi)故障的重要性,有待進(jìn)一步研究。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
