一種多性能要求的控制器設(shè)計方法及其應(yīng)用*
2019-06-08 05:36:04李繼廣董彥非屈高敏王克平白楠楠
彈箭與制導(dǎo)學(xué)報 2019年6期
李繼廣,董彥非,屈高敏,王克平,吳 悅,白楠楠
(西安航空學(xué)院飛行器學(xué)院, 西安 710077)
0 引言
隨著無人機的廣泛應(yīng)用和任務(wù)擴展的需求,對無人機的飛行性能也提出了更高的要求[1-2]。這種更高的性能需求,對最常用PID控制方法提出了新的挑戰(zhàn)。為了解決該問題,許多現(xiàn)代控制方法得到了重視和深入研究。例如,文獻[3]采用根軌跡方法設(shè)計PID控制器,實現(xiàn)對可變性飛行器的縱向控制;文獻[4]研究了魯棒H控制綜合問題;文獻[5]設(shè)計無人機姿態(tài)自適應(yīng)模糊PID控制器;文獻[6]提出了一種基于約束粒子群優(yōu)化的導(dǎo)彈控制器設(shè)計方法;文獻[7]提出了一種最優(yōu)魯棒特征結(jié)構(gòu)設(shè)計方法。
雖然這些方法相較于傳統(tǒng)PID控制方法有著巨大的優(yōu)勢。但是,這些方法設(shè)計的目標(biāo)都是使得控制系統(tǒng)的單一性能指標(biāo)達到最優(yōu)。而且,相較于傳統(tǒng)的PID控制器,這些方法的設(shè)計過程都很復(fù)雜,工程實現(xiàn)也很困難。對于無人機這種飛行環(huán)境復(fù)雜、任務(wù)需求多樣、自身非線性和耦合特性嚴(yán)重的控制對象來說,單一性能指標(biāo)最優(yōu)在實際中并不能滿足需要[8-9]。例如,響應(yīng)特性最優(yōu)控制器往往穩(wěn)定性和魯棒性較差;魯棒性最優(yōu)的控制器操作性能和動態(tài)特性往往不能令人滿意。因此,在工程實踐中,需要的并不是單一指標(biāo)最優(yōu)的控制器,而是各項指標(biāo)都能滿足需求的控制器。
為了解決該問題,文中在深入分析無人機橫側(cè)向運動控制需求的基礎(chǔ)上,提出了一種滿足多種性能指標(biāo)約束的控制器設(shè)計方法。
1 無人機橫側(cè)向運動及控制需求分析
無人機橫側(cè)向運動主要包括側(cè)滑角β、滾轉(zhuǎn)角速率p、偏轉(zhuǎn)角速率r及滾轉(zhuǎn)角φ。運動方程如下:
(1)
式中:m為無人機的重量;v0為無人機真空速;δa為副翼;δr為方向舵;Ix、Iz、Ixz為無人機轉(zhuǎn)動慣量;其它為無人機的氣動參數(shù)。
在無人機的橫側(cè)向運動中,側(cè)滑角是需要消除掉的運動狀態(tài)。從式(1)中的第2、第3式可知,側(cè)滑角對無人機的滾轉(zhuǎn)角和偏航角有著巨大的影響。因此,側(cè)滑角的存在會對無人機的氣動特性和穩(wěn)定性能產(chǎn)生極大的影響,嚴(yán)重影響無人機的飛行性能和飛行品質(zhì)。滾轉(zhuǎn)角是需要快速、精確控制運動狀態(tài),這對無人機的穩(wěn)定和按航跡自主飛行至關(guān)重要。另外,從式(1)中的第1式可知,無人機的滾轉(zhuǎn)角會對側(cè)滑角產(chǎn)生耦合影響。如何在滾轉(zhuǎn)操縱時防止側(cè)滑角的出現(xiàn)是無人機橫側(cè)向控制的難點。由于無人機自主飛行的特性,因此對系統(tǒng)的穩(wěn)定性有著更高的要求。同時,各種擾動和外界干擾,會對無人機的運動產(chǎn)生影響,從而影響飛行穩(wěn)定和航跡跟蹤精度。所以,對控制器的魯棒性也有較高的要求。
因此,對于無人機的橫側(cè)向控制來說,對控制器的要求包括穩(wěn)定性、快速響應(yīng)、穩(wěn)態(tài)誤差小,以及較強的魯棒性。這些性能指標(biāo)并不強調(diào)每一項最優(yōu),但是要求所有指標(biāo)都滿足控制需求。
2 性能指標(biāo)的數(shù)學(xué)表達
無人機橫側(cè)向運動模型可表示成如下形式:
(2)

在滿足各種指標(biāo)需求的控制理論思想指導(dǎo)下,對于帶有控制器的閉環(huán)系統(tǒng),建立滿足各種系統(tǒng)性能指標(biāo)需求的約束條件。以原系統(tǒng)式(2)為例,其帶有狀態(tài)反饋的閉環(huán)系統(tǒng)為:

(3)
式中:K為狀態(tài)反饋控制器參數(shù)。
該閉環(huán)控制系統(tǒng)各項指標(biāo)以及數(shù)學(xué)約束如下:
1)極點指標(biāo)
該指標(biāo)主要體現(xiàn)系統(tǒng)的穩(wěn)定性要求和快速響應(yīng)要求。該指標(biāo)約束要求閉環(huán)系統(tǒng)的極點位于左半復(fù)平面區(qū)域Ω={s∈C:Re(s)≤-α}(α>0)。該指標(biāo)約束可用方程表示為[10]:
(4)
2)方差指標(biāo)
方差指標(biāo)是系統(tǒng)無穩(wěn)態(tài)誤差需求的體現(xiàn)。在數(shù)學(xué)上,該指標(biāo)為閉環(huán)系統(tǒng)的穩(wěn)態(tài)協(xié)方差矩陣E滿足diag(E)≤σ2。該指標(biāo)約束可用方程表示為:
(5)
(6)
設(shè)計滿足各種需求的控制器,就是求解式(4)~式(6)所確定的線性不等式方程組。
3 基于增廣系統(tǒng)的控制器設(shè)計
3.1 控制器設(shè)計
無人機橫側(cè)向線性連續(xù)時不變系統(tǒng)可表示為:

(7)
式中:ω為隨機擾動,是均值為零的高斯白噪聲,其強度為w>0;A、B、C、D為適維矩陣。
對于式(7)所確定的系統(tǒng),在控制輸入點之前引入積分環(huán)節(jié)構(gòu)建增廣系統(tǒng)可得:
(8)
式中:

設(shè)增廣系統(tǒng)的狀態(tài)反饋為:
uz=Kz
(9)

(10)
則可得原系統(tǒng)(7)的PI形式的控制器:

(11)
式中:K3=K2(BTB)-1BT,K4=K1-K2(BTB)-1BTA。
通過式(8)所建立的增廣系統(tǒng),和第2節(jié)所確立的性能約束條件,通過求解多維線性矩陣不等式組,則可以得到系統(tǒng)(2)類似傳統(tǒng)PI控制器的滿足多性能要求的控制器。
3.2 控制器存在性條件
從上節(jié)的設(shè)計過程知道,無人機橫側(cè)向多性能控制器設(shè)計最后歸結(jié)為求解3個線性矩陣不等式。但是,這里面臨著一個問題:是否存在這樣的反饋控制參數(shù)K,使得閉環(huán)系統(tǒng)滿足這些線性矩陣不等式的約束?
為了回答該問題,文中做如下證明。令X=A+BK為要求解的矩陣,對以上指標(biāo)約束方程在形式上做簡單變形,可以表示成以下統(tǒng)一的形式:
XG+GTXT+Q<0
(12)
下面以確定該線性矩陣不等式方程的可解性條件,從而判斷兩種控制器可解空間的大小。為了給出線性矩陣不等式(12)具有可行解的條件,先給出下面的投影定理。

(13)

(14)
由Schur補引理,式(14)等價于:
(15a)
(15b)

由投影定理可知,式(12)具有可行解的條件是:
GT⊥QGT⊥T>0
(16)
因此,可以得到如下結(jié)論:
定理1:線性矩陣不等式XG+GTXT+Q<0可行的充分必要條件為:
GT⊥QGT⊥T>0,XG+GTXT+Q<0
(17)
4 和PID控制器比較
對于文中所得到滿足多種性能指標(biāo)要求的控制器,對原系統(tǒng)來說,實質(zhì)上是一種類似PI控制器的全狀態(tài)反饋控制器。那么,該控制器在工程實現(xiàn)上是否存在問題呢?和傳統(tǒng)的PID控制器相比又有什么優(yōu)缺點呢?下面將解決該問題。
4.1 兩種控制器性能及結(jié)構(gòu)分析
基于積分環(huán)節(jié)構(gòu)建增廣系統(tǒng)構(gòu)建的控制器如式(11)所示。對原系統(tǒng)來說,該控制器實質(zhì)上是一種全狀態(tài)反饋控制器。下面分析該控制器的積分部分。
一個系統(tǒng),在所有激勵作用下可表示為:

(18)
對上述系統(tǒng)表達式兩邊積分可得:
(19)
對于全狀態(tài)反饋控制系統(tǒng)來說,系統(tǒng)輸入可表示為:
U=LX
(20)
把式(20)代入式(19)可得:
(21)
當(dāng)矩陣(A-BL)為可逆矩陣時,則有:

(22)
把式(20)代入式(18)式可得:

(23)
若系統(tǒng)的比例積分控制器表示為:
(24)
把式(22)代入式(24)可得:
U=[K3+K4(A-BL)-1]X
(25)
若系統(tǒng)的PID控制器表示為:
(26)
把式(22)和式(23)代入式(26)可得:
U=[K3+K4(A-BL)-1+K5(A+BL)]X
(27)
根據(jù)以上分析可知,可得如下結(jié)論:
定理2 在系統(tǒng)的狀態(tài)全部參與控制反饋的情況下,當(dāng)L=K3+K4(A-BL)-1所確定的矩陣L存在時,全狀態(tài)反饋控制器與比例積分(PI)控制器等價。當(dāng)L=K3+K4(A-BL)-1+K5(A+BL)所確定的矩陣L存在時,全狀態(tài)反饋控制器與PID控制器等價。
4.2 文中控制器的優(yōu)點
工程實踐中,在控制性能相當(dāng)?shù)那闆r下,文中控制器在結(jié)構(gòu)和工程應(yīng)用上具有的優(yōu)勢如下:
首先,設(shè)計得到的控制器和傳統(tǒng)PID控制器相似,具有結(jié)構(gòu)簡單的優(yōu)點。另外,由定理2可知,該控制器在滿足一定條件下,和傳統(tǒng)PID控制等價。但是,由于采用了全狀態(tài)反饋控制的形式,相當(dāng)于對系統(tǒng)的每一狀態(tài)都進行了控制。因此,相較于只對輸出狀態(tài)進行控制的傳統(tǒng)PID控制器來說,可以獲得更好的控制效果。
第二,減少了控制對微分和積分信號的依賴,方便工程實現(xiàn)。以飛行控制系統(tǒng)為例,在當(dāng)前技術(shù)條件下可以直接測量得到的反饋信號依然有限。迎角、側(cè)滑角等信號的測量誤差較大,測量儀器安裝困難且傳感器成本較大;積分和微分等高階信號直接測量是十分困難甚至是不可能的。因此,減少對微分和積分信號依賴的控制器,更利于工程實現(xiàn)。
第三,提高系統(tǒng)的可靠性。全狀態(tài)反饋控制器可以不必測量系統(tǒng)的微分和積分信號,減少了系統(tǒng)大測量和電子器件。在器件故障率相同的條件下,減少器件的使用數(shù)量,也就提高了系統(tǒng)的可靠性。
第四,經(jīng)濟性更好。測量敏感器件的花銷占據(jù)了控制系統(tǒng)成本的很大一部分,全狀態(tài)反饋控制器依賴比較少的反饋信號,降低了系統(tǒng)中測量敏感器件的數(shù)量,從而降低了控制系統(tǒng)的成本。
5 仿真驗證
某飛機的飛行狀態(tài)為:飛行速度v0=100 m/s,H=5 000 m。側(cè)向運動方程為:
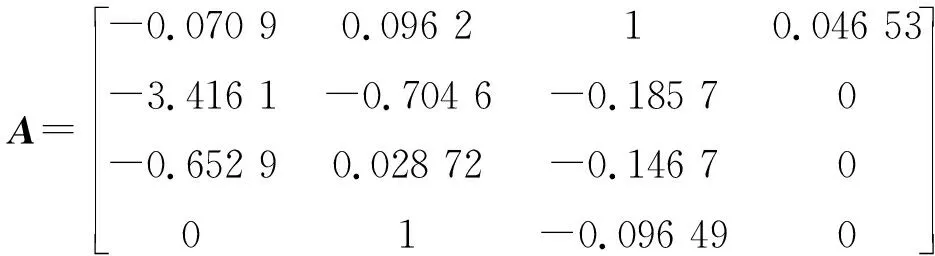

以極點位于(-6,0)為圓心,2為半徑的圓形區(qū)域,方差指標(biāo)σ≤10為設(shè)計條件,采用滿足多性能要求的控制器設(shè)計方法得到的控制器參數(shù)如下:


采用設(shè)計得到的控制器,下面來驗證控制器的控制效果。首先來看控制器對側(cè)滑角的消除能力。當(dāng)側(cè)滑角為5°時,無人機的側(cè)滑角響應(yīng)如圖1所示。

圖1 控制器對無人機側(cè)滑角的消除能力
從圖1可知,控制器僅用了2 s就消除了無人機的側(cè)滑角,響應(yīng)迅速。而且,側(cè)滑角收斂到0°狀態(tài),沒有穩(wěn)態(tài)誤差的存在。說明文中所設(shè)計的控制器具有快速消除側(cè)滑角的能力。
接下來看控制器對滾轉(zhuǎn)角通道的快速響應(yīng)能力。給定5°滾轉(zhuǎn)角指令,無人機的滾轉(zhuǎn)角響應(yīng)如圖2所示。
從圖2可知,無人機的滾轉(zhuǎn)角僅用1.8 s就快速跟蹤了滾轉(zhuǎn)角輸入指令。而且響應(yīng)過程無超調(diào)、無穩(wěn)態(tài)誤差。
從無人機側(cè)滑角消除和滾轉(zhuǎn)角響應(yīng)仿真結(jié)果可知,所設(shè)計的控制器具有良好的性能,滿足設(shè)計要求。證明了文中方法所設(shè)計的控制器是有效的。
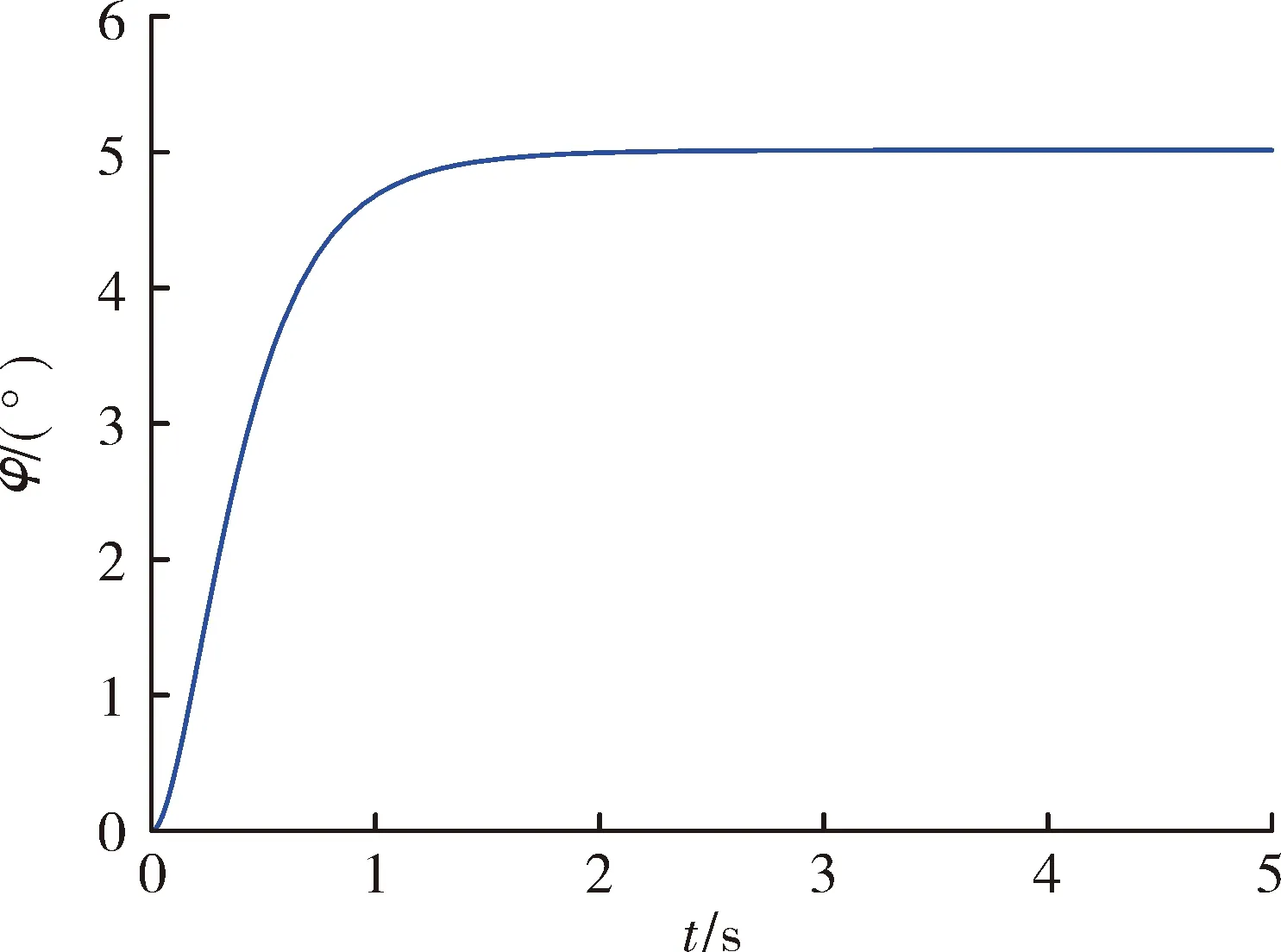
圖2 無人機滾轉(zhuǎn)角通道響應(yīng)
6 結(jié)論
針對無人機橫側(cè)向控制的具體問題和工程上對控制器的實際需求,提出了一種滿足多性能需求要求的控制器設(shè)計方法。工程所需要的控制器,并不追求單一性能指標(biāo)的最優(yōu),而是各項性能指標(biāo)都滿足需求。因此,文中以穩(wěn)定性、快速響應(yīng)、穩(wěn)態(tài)誤差、魯棒性為設(shè)計性能指標(biāo)要求,設(shè)計一種滿足多種性能要求的控制器。文提出了該控制器的設(shè)計步驟,證明了該控制器存在的條件,以及該控制器和傳統(tǒng)PID控制器對比存在的優(yōu)點。
所設(shè)計控制器的優(yōu)點包括:控制效果好;減少了控制器對微分和積分信號的依賴;提高系統(tǒng)的可靠性;經(jīng)濟性更好。最后,通過對無人機橫側(cè)向運動控制器的設(shè)計和仿真驗證,證明了該控制器滿足各種性能指標(biāo),該方法是有效的。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
