基于共心球透鏡的多尺度廣域高分辨率計算成像系統設計*
2019-05-29 06:25:48劉飛魏雅喆韓平麗劉佳維邵曉鵬
物理學報 2019年8期
劉飛 魏雅喆 韓平麗 劉佳維 邵曉鵬?
1) (西安電子科技大學物理與光電工程學院,西安 710071)
2) (中國科學院長春光學精密機械與物理研究所,應用光學國家重點實驗室,長春 130033)
針對實時廣域高分辨率成像需求,充分利用具有對稱結構的多層共心球透鏡視場大且各軸外視場成像效果一致性好的特點,設計基于共心球透鏡的多尺度廣域高分辨率計算成像系統.該系統基于計算成像原理,通過構建像差優(yōu)化函數獲得光學系統設計參數,結合球形分布的次級相機陣列進行全局性優(yōu)化,提高系統性能的同時有效簡化光學設計過程、降低系統設計難度.系統穩(wěn)定性測試結果表明,該成像系統的MTF(modulation transmission function)值在截止頻率處接近衍射極限,彌散斑均方根恒小于探測器像元尺寸,整機實景實時成像效果良好,無視覺可見畸變.該系統不僅有效解決了傳統成像中廣域和高分辨率成像矛盾的問題,而且為計算光學成像系統設計奠定了一定研究基礎.
1 引言
廣域高分辨率光電成像系統能夠捕捉到大空間范圍內的目標信息,且作為最直接的信息獲取手段能提供符合人眼視覺特性的直觀探測結果[1-3],在無人機偵察與防控、環(huán)境監(jiān)控及海上搜救等眾多領域應用廣泛[4-9].
傳統廣域光電成像系統所采用的小視場高分辨率掃描成像方式[10]主要依靠轉臺的機動性和靈活性來增大成像系統的偵測和監(jiān)視范圍,以實現系統廣域高分辨成像.然而受光機結構所限,該類系統普遍存在實時性差的問題,無法對空間信息進行實時獲取和精確判讀.相比之下,凝視型廣域成像系統在實時性方面性能更佳,但由于凝視型光電成像系統中廣域范圍成像和高分辨率信息的獲取本身存在一定程度的相互制約關系,即凝視型成像系統在增大光學系統成像視場的同時提高成像分辨率較難實現.目前同時實現廣域和高分辨率成像需求的凝視型光電成像系統主要為魚眼透鏡凝視成像系統[11,12]、環(huán)帶凝視全景成像系統等新型光學成像系統[13-15].上述成像方式雖然能一定程度上解決廣域和高分辨率相互制約這一問題,但場景信息損失率高、視場受雜散光影響較大、圖像畸變大及圖像存在中心盲區(qū)等問題依然存在,難以實現光電成像裝備的實際應用,因此發(fā)展新體制凝視型廣域高分辨率成像系統是新型光電成像裝備的迫切需求.
利用中心對稱結構的球透鏡大視場、小幾何畸變且不易產生軸外像差的特點,文獻[16—20]中提出利用球透鏡和球面探測器陣列實現大視場高分辨率凝視成像.但上述系統中大面陣球面探測器拼接難度大,光學設計過分依賴設計軟件,導致系統設計難度大,成像質量受限.針對以上問題,本文設計了一種基于共心球透鏡的多尺度廣域高分辨率計算成像系統,該系統不僅有效地解決了凝視型光電成像系統中大視場和高分辨率難以統一的問題,而且通過引入計算成像技術有效地簡化了傳統光學系統的設計難度.
基于共心球透鏡的多尺度廣域高分辨率計算成像系統從光學系統設計原則出發(fā),以像差優(yōu)化理論為基礎,充分利用球透鏡視場大、各軸外視場成像效果一致性好的特點,設計以球透鏡為大尺度主物鏡、小尺度相機陣列為次級成像系統的多尺度成像結構.此外,利用計算成像方法構建系統像差優(yōu)化函數,通過求解最優(yōu)化函數快速獲取系統的結構參數.系統穩(wěn)定性分析結果及樣機最終成像效果證明,該成像系統不僅實現了大視場和高分辨率的統一,而且具有良好的成像穩(wěn)定性.
2 多尺度廣域高分辨率計算成像系統設計

圖1 基于共心球透鏡的廣域高分辨率成像原理圖Fig.1.Schematic of monocentric wide field of view (FOV)and high-resolution computational imaging system.
多尺度廣域高分辨率計算成像系統主要利用大尺度球透鏡對稱性好且與視場相關的幾何像差小的特點[3,21],實現場景的大視場成像和高效率能量收集; 而小尺度相機陣列所具有的中繼轉換能力則能夠將球透鏡所成的像轉接到二次像面,為廣域高分辨率成像提供了新的可能.基于上述原理,本文設計了由一級大尺度四層共心球透鏡(主成像系統)和次級中繼小尺度相機陣列(次級成像系統)級聯構成的二級廣域高分辨率計算成像系統,系統成像原理如圖1所示.該系統集成了球透鏡的大視場能量收集能力和次級中繼小尺度相機陣列的局部視場校正能力,共心球透鏡將觀測場景成像于球形一次像面,通過球形排布的小尺度相機陣列進行轉接形成一系列子圖像,結合計算成像方法將共心球透鏡所獲取的場景信息重建為一幅廣域高分辨率圖像.
2.1 共心球透鏡設計
2.1.1 數學模型
光學系統中的幾何像差會影響系統最小可分辨光斑尺寸,并決定系統的成像分辨率及最終成像質量.根據Seidel像差理論,基于共心球透鏡的廣域高分辨率光學成像系統的單色初級像差系數(球差(B )、像散(C )、場曲(D )、畸變(E )和彗差(F ))可表示為[22]
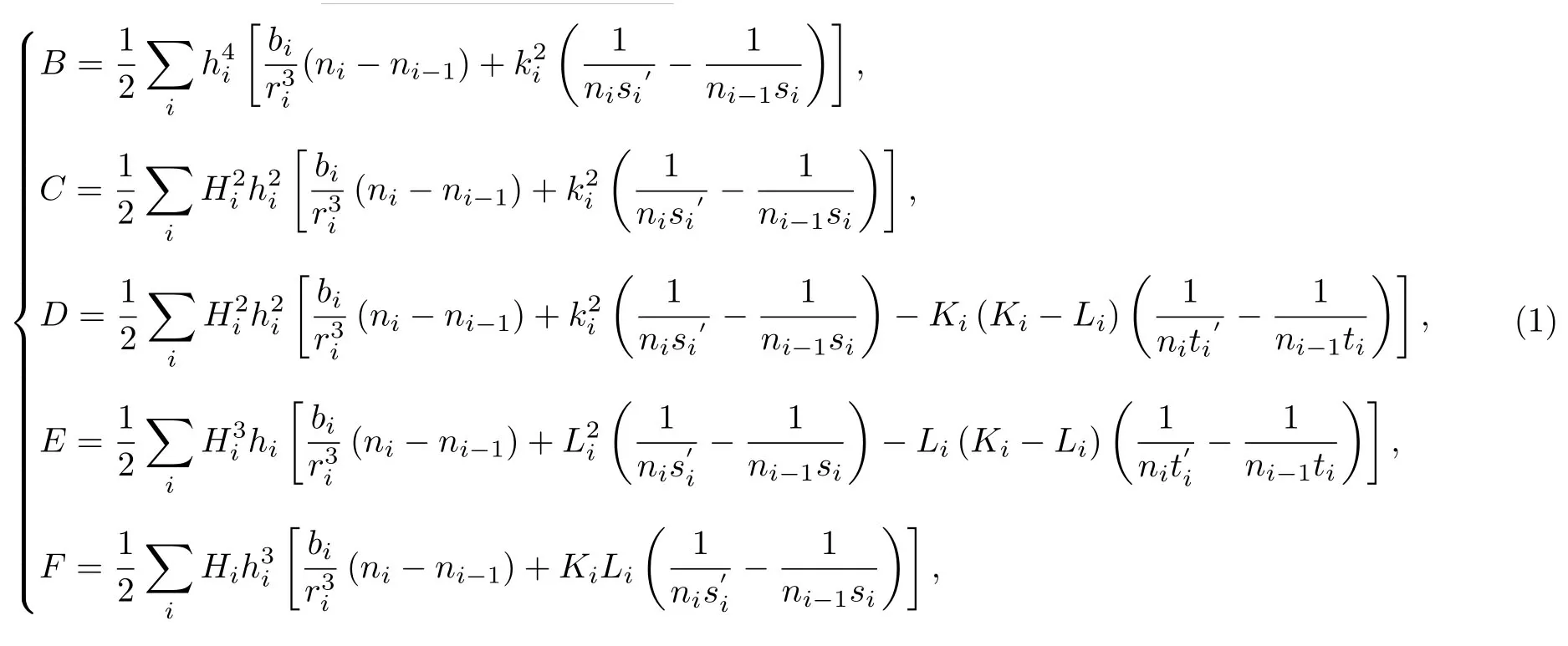
式中各項參數見圖2所示,ri為共心球透鏡成像系統的曲率半徑; n2和v2分別為外層玻璃的折射率和阿貝常數; n3和v3分別為內層玻璃的折射率和阿貝常數,bi為常數[22,23]; hi為物方高度; si和si′分別表示第i個曲面頂點到物平面和第i個像面的距離,Hi=ti/ni-1表示入射光瞳中心出射光線與第i個面交點的高度; ti和ti′分別表示第i個曲面頂點到入射光瞳和第i個面入瞳所成像的距離; Ki和Li表示如下:
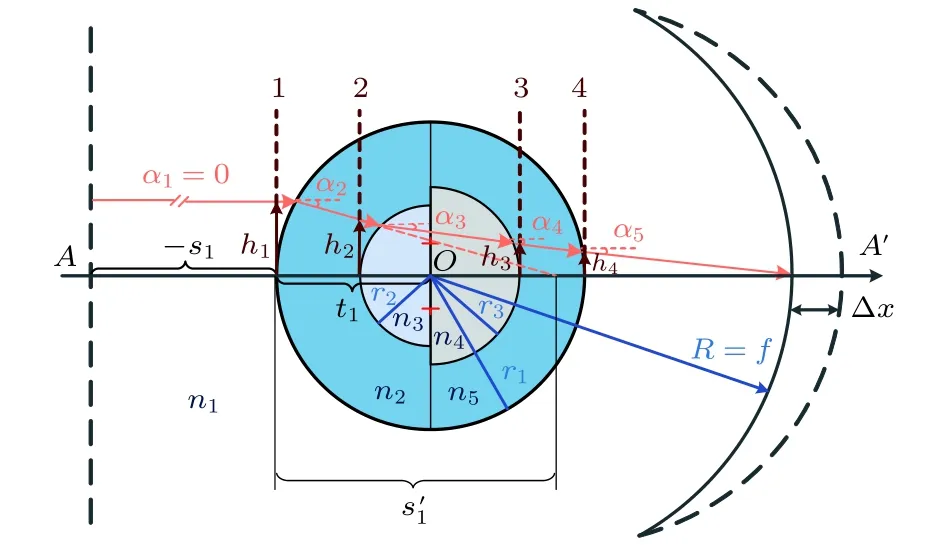
圖2 共心球透鏡成像光路圖Fig.2.Ray diagram of themonocentric multi-scale ball-lens.
如圖2所示,共心球透鏡的光闌位于球心,以實現其結構對稱性.為便于計算,利用(3)式所示的Seidel波像差系數表示共心球透鏡的像差[24,25],

其中 ρ∈[-1,1],?∈ [0,π]構成表示光程差OPD(optical path difference)的二維極坐標函數,Wλjk為像差系數,R為徑向坐標,λ,j和k 是非負整數,λ表示徑向坐標參量,j 表示徑向分量最高階數,k為正弦分量的角向頻率數.由于共心球透鏡具有對稱性且一次像面與主物鏡為共心球面,故軸外像差較小[23].因此,影響球透鏡成像質量的因素主要為球差以及復色光成像過程中由光波波長差異所引起的系統色差.
由于光學成像系統中的光線參數無法直觀衡量系統優(yōu)化結果,因此在設計中用光學系統的結構參數代替光線參數.通過(4)式中平行光線追跡法實現光線參數與光學系統結構參數間的轉化,
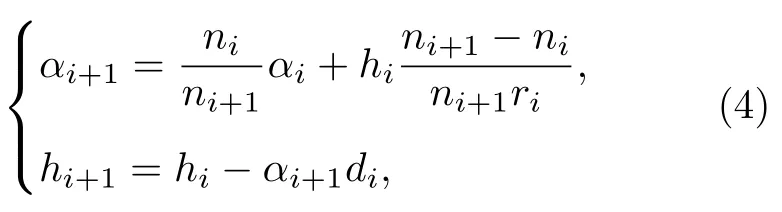
其中 di表示透鏡表面i和i+1間的距離,對于共心球透鏡則存在 d1=d3=r1-r2,d2=r2.因此,對文中系統從位置 h1=f×NA 且 α1=0 處開始光線追跡分析殘留像差,其中系統像方焦距 f 如(5)式所示.對該系統中的多層共心球透鏡的每個光學表面應用阿貝不變式,利用透鏡的結構參數來代替物像參數,并通過(4)式和(5)式迭代可得球差的波像差系數如(6)式所示.
同理,系統色差可表示為

上述分析表明,共心球透鏡系統的設計參數直接決定了其像差分布情況,因此建立如(8)式所示的像差優(yōu)化函數進行全局像差最優(yōu)化計算.

該像差評價函數為一階連續(xù)函數且只存在一個最小值,求解可得共心球透鏡的曲率半徑 r1,結合(5)式可計算球透鏡的曲率半徑 r2,r3及r4,即通過上述計算可以確定該多尺度廣域高分辨率計算成像系統中共心球透鏡的初始設計參數.
2.1.2 共心球透鏡性能分析
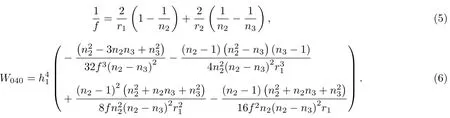
通過2.1.1節(jié)中建立的像差優(yōu)化函數可以確定多尺度廣域高分辨率計算成像系統中的多層共心球透鏡參數的最佳理論設計值,結果如表1所列.
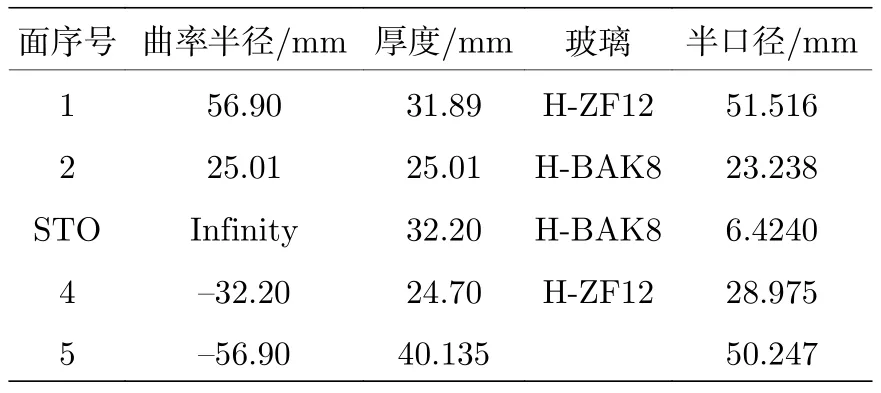
表1 共心球透鏡初始結構參數Table 1. Structural parameters of the monocentric ball-lens.
圖3(a)為利用表1所列數據確定的共心球透鏡二維成像結構圖,其像面為與所有光學表面共心的球面.圖3(b)為共心球透鏡的調制傳遞函數曲線,各個視場MTF (modulation transmission function)曲線平直,且趨勢基本一致,即各視場像差近似相同,從而可用相同小尺度相機校正不同視場處殘余像差,并實現中繼成像.
圖3(c)為共心球透鏡的點列圖,各個視場彌散斑80%能量均在艾里斑內,表明共心球透鏡各視場成像效果相近,且具有較好的能量收集能力.圖3(d)為共心球透鏡的光線像差圖,各視場曲線均通過坐標零點,不存在離焦; 各曲線兩端點連線與坐標軸交于原點,不存在子午彗差.以上結果表明,本文提出的基于計算成像原理建立像差優(yōu)化函數來獲取光學系統設計參數的方法能夠快速有效地獲得良好的光學系統設計結果.
2.2 小尺度相機設計及整體系統優(yōu)化
球透鏡將場景成像于與自身共心的球形一次像面上,此時通過探測器直接接收將會由于探測器在像面位置占空比過低導致目標場景信息丟失,故設計與球透鏡共心的二次小尺度相機陣列轉接系統,將一次像面中繼成像至多個探測器從而獲取完整目標場景信息,實現廣域高分辨率成像.此外,由圖3(c)可見,經優(yōu)化設計后球透鏡與視場相關的像差較小,主要影響成像質量的為球差和色差,且像差優(yōu)化函數已確保僅存在小部分殘余像差,降低了后續(xù)像差校正難度.可通過對小尺度相機陣列進行特定設計同時校正中繼成像過程中球透鏡所產生的殘余像差,其結構如圖4所示.為實現二次中繼成像系統自身像差及球透鏡殘余像差的校正,本文采用具有對稱結構的雙高斯系統.該系統能夠通過正負透鏡組合設計校正球差,而通過在厚透鏡中引入膠合面來校正色差.
圖3 (a)共心球透鏡二維成像結構圖; (b)調制傳遞函數曲線圖; (c)共心球透鏡點列圖; (d)共心球透鏡光線像差圖Fig.3.(a) Structure of the designed monocentric ball-lens; (b) MTF curves; (c) the spot diagram; (d) the ray fan curves.
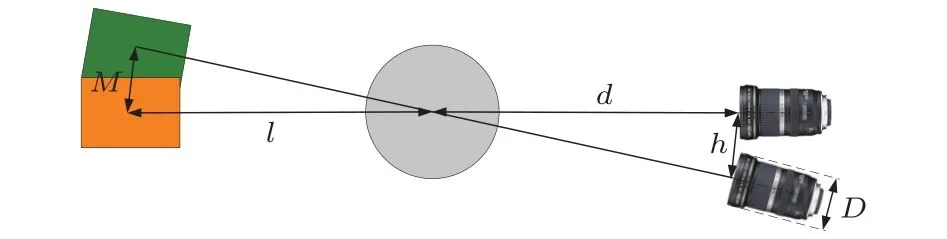
圖4 相鄰小尺度相機視場重疊對應關系示意圖Fig.4.Schematic showing the FOV overlapping betweenthe adjacent micro cameras.
此外,二次成像系統的口徑、視場、焦距及二次成像系統與球透鏡的中心距離等均是影響像面拼接的制約條件,因此需在小尺度相機陣列設計時考慮系統像差與視場重疊的平衡問題.為保證相鄰小尺度相機間的視場重疊并提高視場利用率,相機陣列采用正六邊形幾何排布方式,各鏡頭物方視場重疊情況如圖5所示,其中和分別表示物方橫向和縱向有效視場長度.
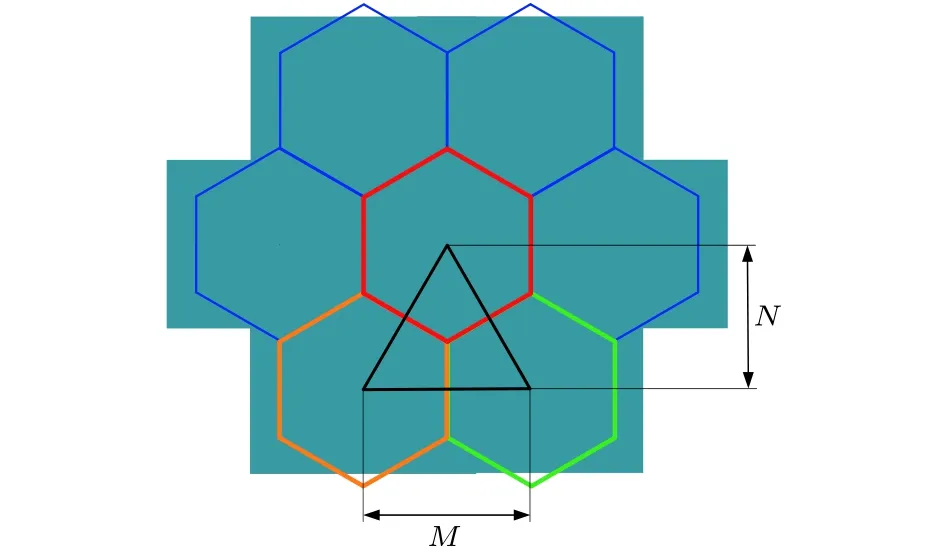
圖5 小尺度相機排布示意圖Fig.5.Distribution of the small-scale micro camera.
相鄰小尺度相機視場重疊關系可簡化為圖4所示形式,圖中 l 表示成像距離,表示球透鏡中心到小尺度相機的距離,表示相鄰小尺度相機的中心距離,表示小尺度相機的封裝口徑.
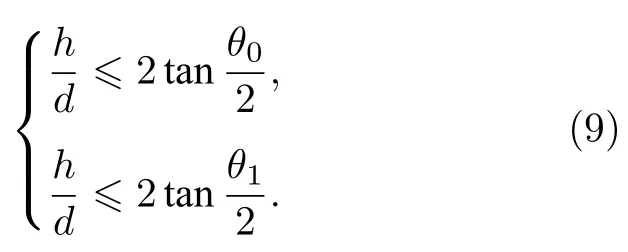
(9)式等號成立的條件為相鄰小尺度相機視場恰好重疊,此外還需滿足 h>D,以保證相鄰小尺度相機有足夠的排列空間.滿足視場重疊條件和成像質量需求時,物方橫向和縱向有效視場長度為:

若需達到的物方成像視場范圍為 m ×n,則所需小尺度相機的數量為

結合上述約束條件并優(yōu)化光學系統,最終確定小尺度相機封裝后口徑 D=14 mm,相機到球透鏡中心距離 d=175.9 mm.當成像距離 l=2 km 時,通過 (9)式—(11)式計算可得,橫向張角4.5614?<θ< 6.4829?,縱向張角3.9500?< θ1< 5.6138?,相鄰相機中心間距 1 4.0000 mm<h<19.9240 mm.為保證 120°× 90°成像視場下分辨率為 6 cm,所需小尺度相機數量至少19 × 17個,最多25 × 23個.
基于共心球透鏡的多尺度廣域高分辨率計算成像系統整體光學結構如圖6所示,整體光學系統長295 mm,其中共心球透鏡直徑為113.8 mm,二級成像系統為6組9片、長度為62 mm的雙高斯結構.該系統球透鏡焦距103.02 mm,小尺度相機焦距 20.83 mm,像方 F#為 3.30,入瞳直徑約14.24 mm,單路次級小尺度相機全視場8°.由小尺度相機構成的二級光學系統將共心球透鏡視場均分為若干個等大的子視場,通過子視場拼接設計實現獲取共心球透鏡大視場范圍內的高分辨率圖像.
為明確系統的整體成像情況,分析系統MTF曲線、點列圖、及表征各個小視場內成像差異性的場曲畸變圖和光線像差圖分布情況,結果如圖7所示.圖7(a)表明該系統在截止頻率357 lp/mm處,系統的MTF值在0.2左右,且全波段MTF曲線變化趨勢一致,均接近衍射極限; 系統的零度視場、半視場和全視場MTF曲線變化趨勢一致且均接近系統衍射極限,表明各視場成像質量良好.圖7(b)所示的系統點列圖中,全波段的系統彌散斑均方根半徑RMS的最大值為 1 .145μm,恒小于探測器像元尺寸 1 .4μm,滿足系統與探測器匹配的要求.圖7(c)所示的系統場曲和畸變曲線顯示系統的場曲值在 ± 0.04范圍內,畸變值保持在0.5%以內,二者都控制在光學系統設計有效范圍內,表明系統設計合理有效.圖7(d)為系統整體光線像差圖,結果顯示各視場中子午和弧矢方向上曲線變化情況較小,且整體變化貼合坐標軸,球差和像散校正效果較好,且該曲線在坐標原點附近曲線斜率為0,說明像面無離焦現象.上述分析結果表明,優(yōu)化后的多尺度廣域計算成像系統各參數均滿足設計要求,成像效果良好.
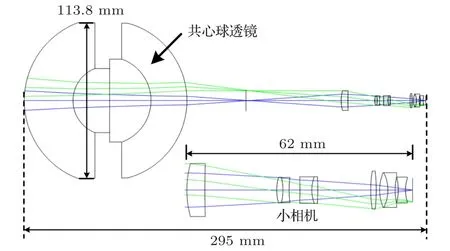
圖6 光學系統結構圖Fig.6.Structure of the whole optical system.
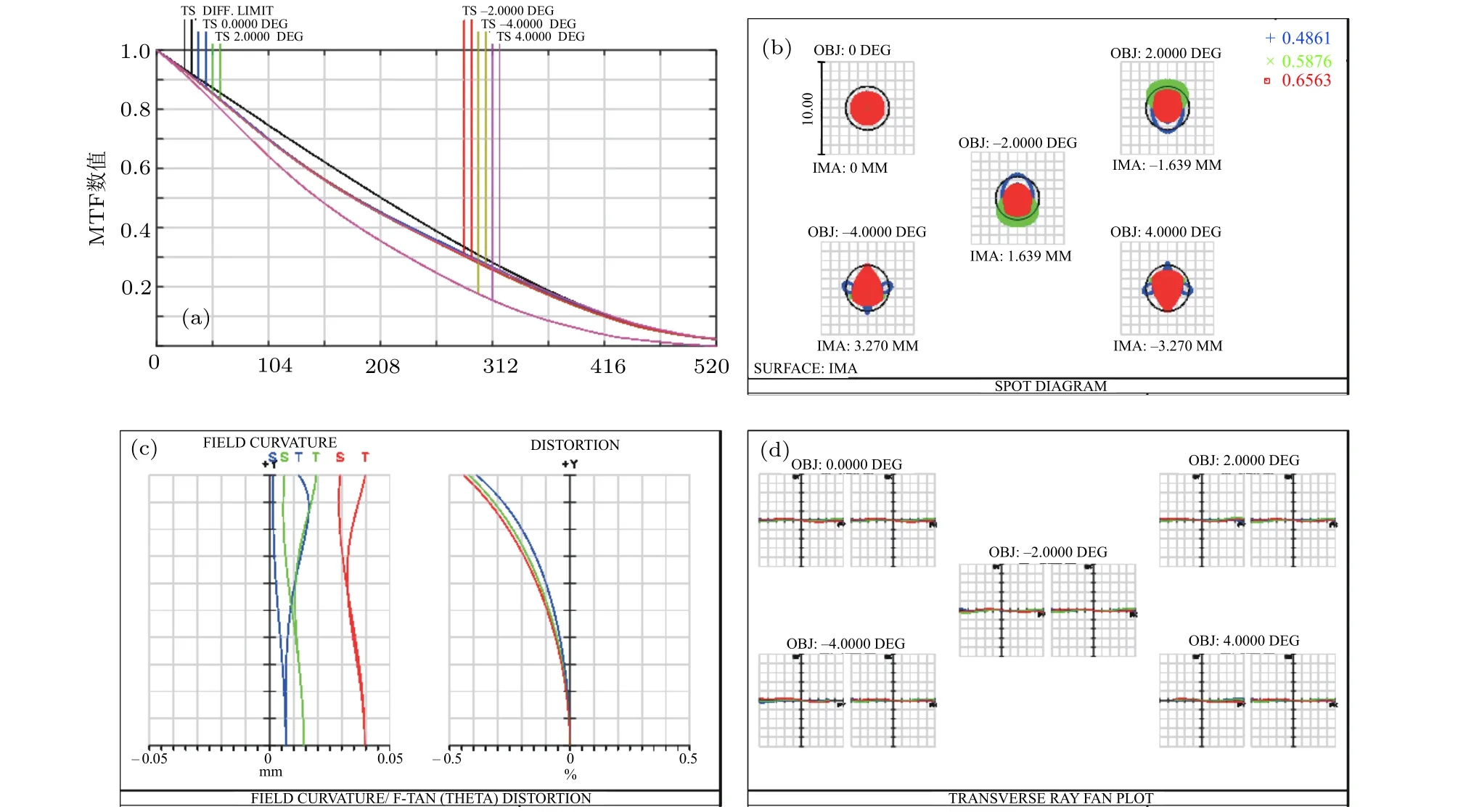
圖7 (a)系統MTF曲線圖; (b)系統點列圖; (c)系統場曲和畸變圖; (d)系統光線像差圖Fig.7.(a) MTF curves of the whole system; (b) the spot diagram; (c) the field-curve and distortion; (d) the ray fan of the system.
3 系統性能分析
為避免光學系統在加工時由于公差分配而導致的成像性能下降的問題,本文利用反敏感度分析法對多尺度廣域高分辨率計算成像系統的成像穩(wěn)定性進行分析,以確保該光學成像系統的MTF曲線分布滿足成像需求.圖8所示為利用1000次Monte Carlo分析方法在不同公差分配情況下該成像系統MTF曲線分布情況,以此來分析多尺度廣域高分辨計算成像系統的成像穩(wěn)定性.
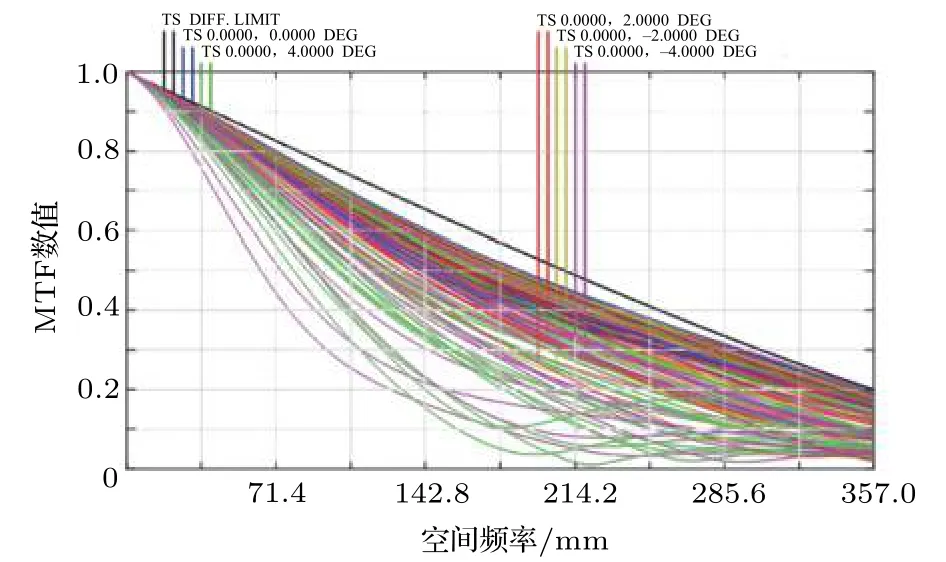
圖8 不同公差分配時的MTF疊加曲線Fig.8.MTF curves at different tolerance values.
Monte Carlo仿真結果表明系統MTF在截止頻率357 lp/mm處取值不低于0.05,其中超過0.053的概率可達98%,而該系統MTF值在截止頻率處大于等于0.2的概率約為75%,表明系統具有良好的成像穩(wěn)定性.
經光機電聯合調試,加工完成基于共心球透鏡的多尺度廣域高分辨率計算成像系統,整機實物如圖9(a)所示.圖9(b)為半徑R=56.8 mm的系統主物鏡,為四層三膠合共心球透鏡.實際中為了便于裝配,外側兩層結構設計為扇面結構.根據設計需求,在球透鏡一次像面后設計次級成像系統,由呈六邊形排布的399個小尺度相機構成,實現視場拼接獲取大視場高分辨率圖像,如圖9(c)所示.小尺度相機陣列外觀和工作方式如圖9(d)和圖9(e)所示,每個相機單獨封裝為獨立單元,方便裝調.考慮到其相鄰視場重疊,采用如圖9(c)中橘色六邊形框所示的正六邊形排布設計,這種排布不僅能夠充分利用光能量,還可以減少次級成像光學系統引入的像差,簡化整體設計和裝調的復雜度,提升最終成像質量.
為驗證該光學成像系統的可靠性,搭建圖10所示實驗測試平臺,圖10(a)為測試平臺結構示意圖,圖10(b)為測試平臺實物實際測量光學系統整機分辨率信息,采用550 mm平行光管和N3靶標板對所設計系統分辨率進行測量,拍攝到的靶標板圖像如圖10(c)所示,實際測量時可以清晰分辨23組線對.查閱如圖10(d)所示的分辨率圖案參數表中單元號與板號對應的空間頻率(lp/mm)可得,N3靶標板中23組對應44.5 lp/mm,其中所設計光學系統的焦距為47 mm,因此系統成像分辨率約520.7 lp/mm,由圖7(a)光學系統仿真MTF曲線可知系統成像理論截止頻率在520 lp/mm左右,系統實測分辨率與理論設計基本相符.
基于共心球透鏡的多尺度廣域高分辨率計算成像系統的部分成像效果圖如圖11所示,該成像系統在5 km探測距離時具有15.4 km × 7.5 km的成像幅寬,整幅照片像素數量可達32億.圖11所示的成像結果取自本系統整體成像結果的1/10,視場范圍約為 70° × 17.5°.以距離覆蓋范圍從近距0.6 km到遠距4.1 km處為例,在該范圍內分別選擇四個不同距離處的建筑物作為目標,目標的距離通過地圖距離測量工具得到,從而分析該系統成像質量情況.圖中給出的三列成像結果分別對應原圖(下),一級放大效果(中)和二級放大效果(上).首先以0.6 km處近目標為例,一級放大效果圖中清晰顯示了建筑物中的窗戶等結構,二級放大后則能夠清晰分辨長度20 cm、高度7 cm左右的墻磚信息,表明該系統在近景范圍內成像效果良好; 當目標距離較遠時,以距離2.1 km處建筑物為例,一級放大圖像提供了清晰的目標建筑物的整體結構信息和包括窗戶、文字標語等在內的細節(jié)信息,而同樣觀測距離下人眼視覺系統已無法分辨此量級信息,經二級放大后,系統成像結果甚至能夠準確提供置于建筑物頂部的直徑10 cm左右的避雷針的形狀輪廓信息; 在遠距離成像中,以4.1 km處建筑物為例,此時人眼僅能捕捉有限的建筑物輪廓,而系統成像結果經過一級放大仍能提供建筑物目標的窗戶等細節(jié)信息,在經過二級放大的圖像中清晰可辨大小約為0.5 m × 0.4 m的空調外掛機,并能夠辨別其左側墻壁上直徑5 cm左右的空調排水管,該結果表明該系統能夠在遠距離條件下獲得良好的成像結果.對于圖中選取的不同距離分布的目標,該系統均能實現高清晰度、高分辨率成像,系統穩(wěn)定性良好、適應性強.此外,如圖所示的視場跨度約為7 km的成像結果中,任意視場位置和成像距離處均不存在視覺可見的圖像畸變,主要原因在于系統主物鏡的對稱結構無固定光軸、軸外像差相對較小,因此具有所見即所得、無需校正畸變的優(yōu)勢.
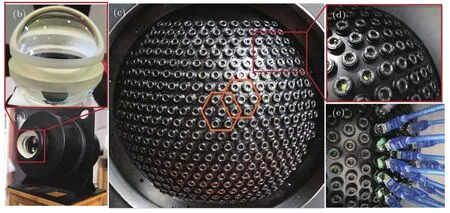
圖9 多尺度廣域高分辨率計算成像系統結構圖Fig.9.Prototype of the multi-scale wide FOV high-resolution computational imaging system.
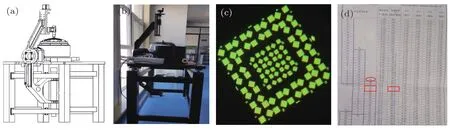
圖10 (a)測試平臺結構示意圖; (b)測試平臺實物; (c)靶標板圖像; (d)分辨率圖案參數表Fig.10.(a) Test platform structure diagram; (b) test platform; (c) the image of target plate; (d) resolution pattern parameters table.
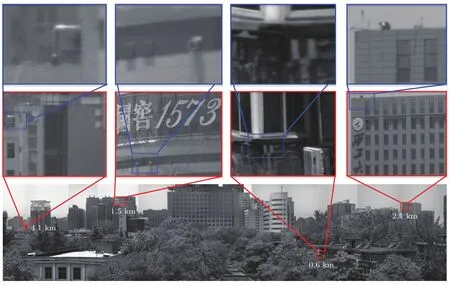
圖11 系統成像效果圖(部分)Fig.11.Imaging results of the designed system (partial result).
4 結 論
為適應大視場、高分辨率實時成像探測需求,針對傳統光電成像探測系統大視場和高分辨率難以同時獲得這一不足,利用共心球透鏡的結構對稱性,提出了一種基于共心球透鏡的多尺度廣域高分辨率計算成像系統.該系統利用四層共心球透鏡有效減小了與視場有關的像差,通過計算成像原理構建像差優(yōu)化函數對光學系統的設計參數進行計算,并結合基于球形分布的次級相機陣列的設計有效地消除了殘余像差.此外,利用反敏感度分析法對于不同公差分配時系統的穩(wěn)定性進行分析可知,在截止頻率357 lp/mm處的MTF值幾乎都能穩(wěn)定在系統衍射極限0.2以上,且彌散斑RMS半徑恒小于探測器像元尺寸,滿足設計要求.系統成像結果也證明,該成像系統能夠對不同距離的目標實現高清晰度、高分辨率無視覺可見畸變成像,系統穩(wěn)定性良好、適應性強.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17