基于曲率控制的緊急避讓路徑跟蹤研究*
2019-05-28 01:31:08王健王金波彭欣邱緒云李愛娟
汽車技術 2019年5期
王健 王金波 彭欣 邱緒云 李愛娟
(山東交通學院,濟南 250357)
主題詞:緊急避讓 自抗擾控制器 復合控制 曲率控制 外界干擾
1 前言
作為一項主動安全技術,緊急避讓技術可在遇到前方障礙物時幫助駕駛員快速無碰撞地進行避讓,同時保證車輛行駛穩(wěn)定性。緊急避讓技術融合了傳感器技術、計算機技術與現(xiàn)代信息技術,利用毫米波雷達、激光雷達、高速攝像機檢測自車與前方障礙物之間的縱向和側(cè)向距離、縱向速度和加速度,自動規(guī)劃出避讓路徑,通過主動控制車輛前輪轉(zhuǎn)角完成轉(zhuǎn)向操作[1-2]。
針對前輪主動轉(zhuǎn)向路徑跟蹤問題,國內(nèi)外學者采用PID控制、最優(yōu)控制、魯棒控制等方法進行路徑跟蹤控制器設計[3-4]。PID控制簡單,但外界環(huán)境發(fā)生改變時自適應能力差;最優(yōu)控制和魯棒控制算法復雜,不利于工程應用,且控制效果很大程度上依賴于被控對象模型的精度。
中科院韓京清教授提出的自抗擾控制(Active Dis?turbance Rejection Control,ADRC)能夠觀測并補償外界干擾,保證路徑跟蹤的魯棒性[5-11]。本文以規(guī)劃的理想避讓路徑曲率和車輛實際行駛路徑曲率作為輸入,設計二階自抗擾曲率跟蹤控制器,為了加快跟蹤速度,采用前饋與反饋控制相結合的復合控制方法進行曲率控制。基于曲率設計的路徑跟蹤控制器能夠保證車輛在緊急避讓工況下,抵抗由于路面附著系數(shù)變化引起的外界干擾。
2 車輛動力學模型及路徑規(guī)劃
2.1 車輛動力學模型
車輛2自由度動力學方程能夠較為準確地反映車輛的橫向動力學特性[12]。為了使設計的控制器便于工程應用,本文以2自由度車輛動力學模型(見圖1)為基礎,設計路徑跟蹤控制器。忽略轉(zhuǎn)向系統(tǒng)的影響,直接以前輪轉(zhuǎn)角作為輸入;忽略懸架的作用;忽略路面不平度和空氣阻力影響。
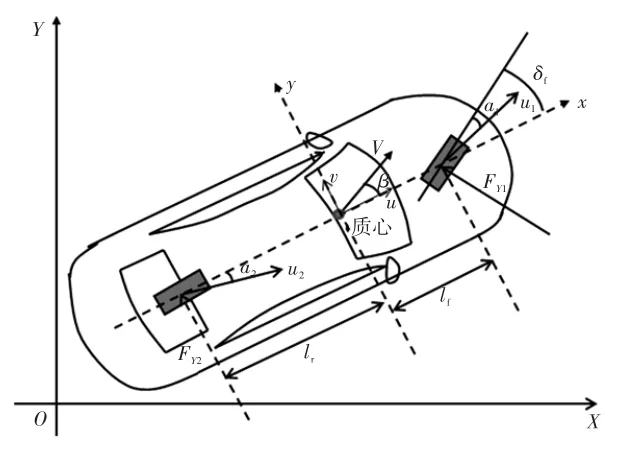
圖1 車輛2自由度模型[12]
車輛2自由度動力學方程可以表示為:

式中,m為整備質(zhì)量;Iz為車輛橫擺轉(zhuǎn)動慣量;lf、lr分別為車輛質(zhì)心到前、后軸的距離;ay為車輛質(zhì)心處側(cè)向加速度;FY1和FY2分別為車輛前、后輪胎受到的側(cè)向力;γ為車輛質(zhì)心橫擺角速度;δf為前輪轉(zhuǎn)角。
車輛前、后輪側(cè)偏角α1、α2以及質(zhì)心側(cè)偏角β和橫擺角速度γ滿足:

式中,u為質(zhì)心處縱向速度。
2自由度車輛動力學狀態(tài)方程可以表示為:
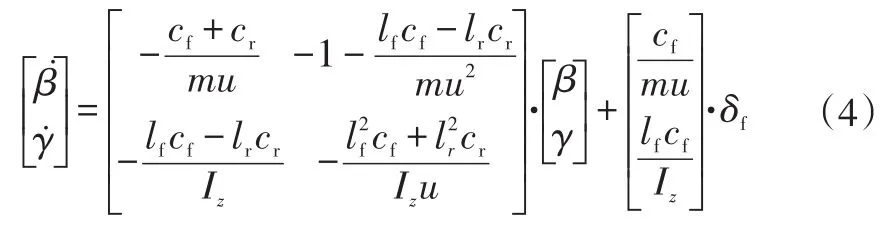
式中,cf、cr分別為前、后輪側(cè)偏剛度。
2.2 路徑規(guī)劃
車輛要完成緊急避讓過程,其駛過的軌跡類似雙移線,避讓軌跡需滿足車輛動力學特性,需限制側(cè)向加速度,保證避讓完成后車身偏航角與水平方向平行,同時需要滿足避障約束、曲率連續(xù)約束、轉(zhuǎn)向速度約束[13-14]。
如圖2所示,以車輛質(zhì)心為參考點,避讓路徑分為2個階段,兩階段為對稱關系。其中:R1為車輛質(zhì)心轉(zhuǎn)彎半徑;dy為車輛右前方與前方障礙物不發(fā)生碰撞要求的側(cè)向位移;dx為車輛質(zhì)心側(cè)向位移到達dy時行駛的縱向位移;Ssteer為最小避讓距離;θ為車輛質(zhì)心轉(zhuǎn)過的角度;yH為障礙物左側(cè)寬度;yE為完成整個避讓過程的側(cè)向位移。車輛在避讓過程中,側(cè)向加速度限制在0.67μmg(μm為路面附著系數(shù),g為重力加速度)以下,由圖2可得[15]:
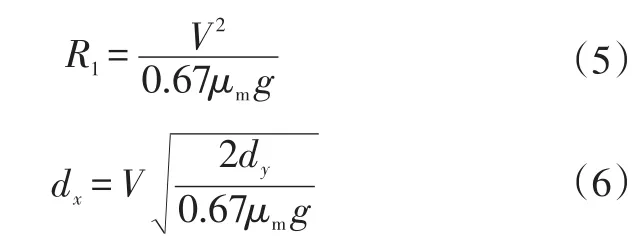
式中,V為車輛質(zhì)心處縱向速度。
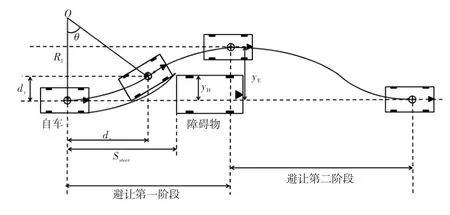
圖2 避讓路徑[15]
V=30 m/s、μm=0.8、yH=1.75 m工況下的路徑規(guī)劃結果如圖3所示。
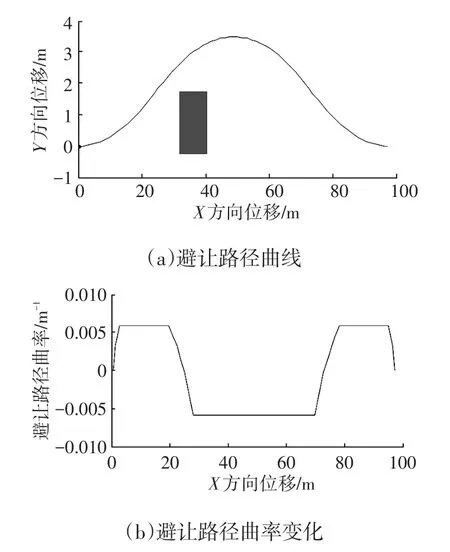
圖3 避讓路徑及其曲率變化
3 曲率跟蹤控制器設計
車輛路徑跟蹤控制器由前饋控制和反饋控制組成。其中前饋控制由車輛等速行駛時穩(wěn)態(tài)橫擺角速度增益得到,穩(wěn)態(tài)橫擺角速度增益為:

前饋前輪轉(zhuǎn)角δff為:

式中,Wsg=LK;ρ為車輛穩(wěn)態(tài)行駛下的路徑曲率。
反饋控制輸入為理想避讓路徑曲率和車輛實際行駛路徑曲率,控制器輸出為附加前輪轉(zhuǎn)角。對式(4)進行拉普拉斯變換,得到橫擺角速度相對于車輛前輪轉(zhuǎn)角的傳遞函數(shù)為:

對上述方程進行拉普拉斯反變換可得:

其中,車輛橫擺角速度與路徑曲率之間滿足:
由式(10)和式(11)可得:

其中二階自抗擾控制器和前饋+反饋控制器分別如圖4和圖5所示。
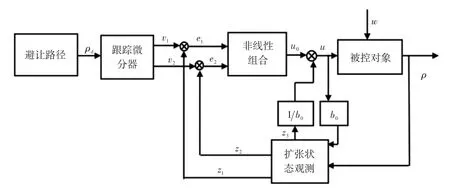
圖4 二階自抗擾控制器
自抗擾控制器由跟蹤微分器、非線性組合、擴張狀態(tài)觀測器組成。其中,跟蹤微分器能夠提取理想輸入的一階導數(shù),并對輸入信號進行濾波處理,擴張狀態(tài)觀測器能夠觀測并補償外界干擾部分。
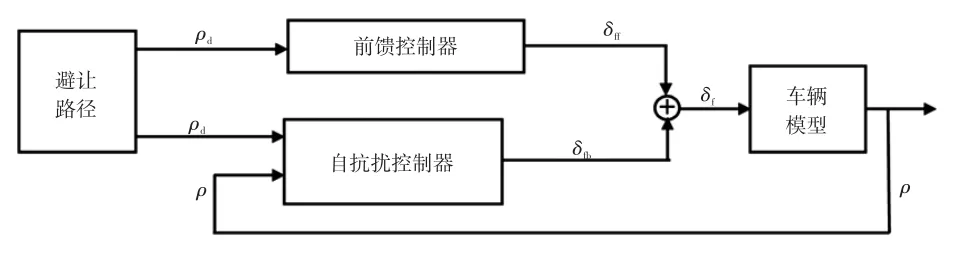
圖5 前饋+反饋控制器
3.1 跟蹤微分器
跟蹤微分器是一個非線性動態(tài)環(huán)節(jié),它能夠快速無超調(diào)地跟蹤輸入信號并給出輸入信號的微分,跟蹤微分器離散化形式為:

式中,fhan可以表示為:
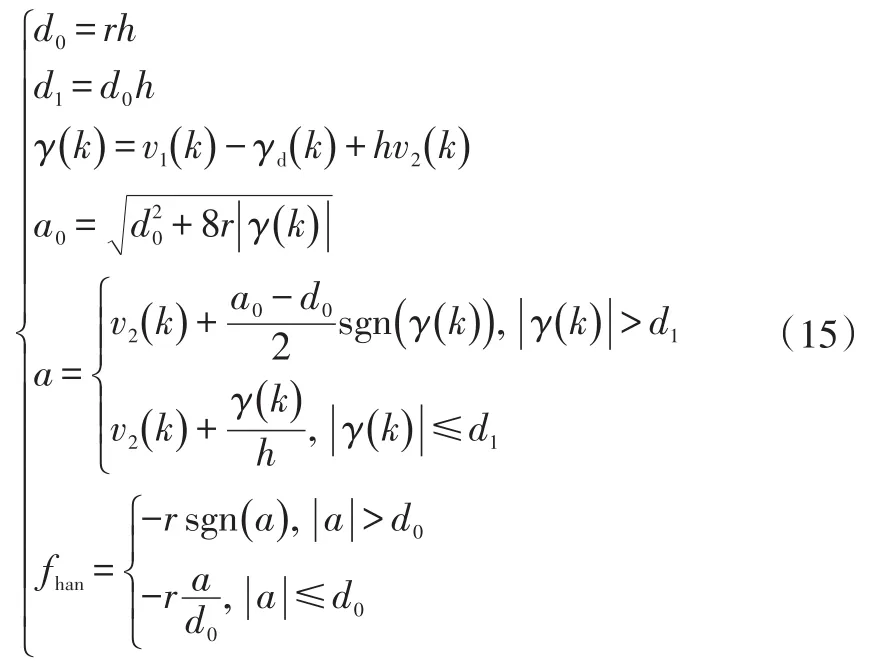
式中,ρd(k)為理想曲率;r和h分別為速度因子和仿真步長;v1(k)和v2(k)分別跟蹤ρd(k)和ρ˙d(k)。
3.2 擴張狀態(tài)觀測器
擴張狀態(tài)觀察器將模型不確定性及外界干擾看作一個整體擾動量,通過擴張的狀態(tài)觀測器將其觀測出來,其離散表達式可以描述成:
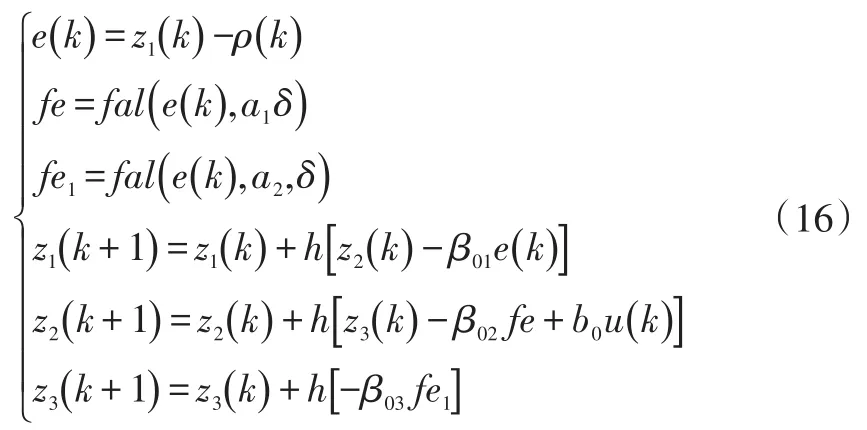
式中,z1(k)、z2(k)和z3(k)為擴張狀態(tài)觀測器輸出。
非線性函數(shù)fal(e(k),a,δ)可以描述為:

式中,a1、a2、δ和b0為設計參數(shù);和為擴張狀態(tài)觀測器增益[14]。
3.3 非線性組合
非線性組合實質(zhì)是一種非線性狀態(tài)誤差反饋控制律,實際上是一個非線性PD控制律,可以用離散形式描述:
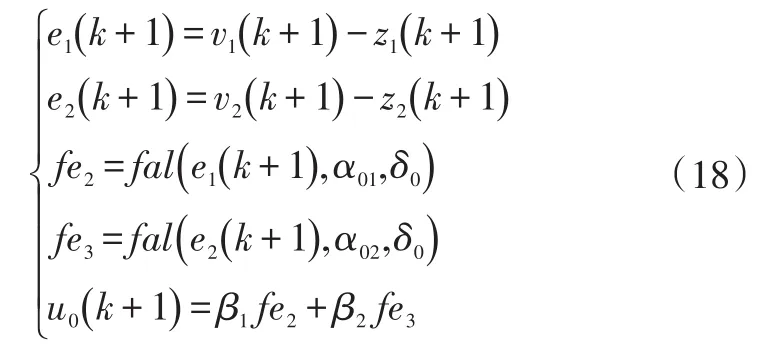
式中,β1、β2、α01、α02和δ0為設計參數(shù)。
4 聯(lián)合仿真驗證
為了驗證控制器的控制效果,進行不同工況下聯(lián)合仿真驗證。車輛動力學仿真軟件CarSim能夠模擬真實車輛動力學特性,具有使用方便、運算迅速、仿真精度高等優(yōu)點。圖6所示為CarSim和Simulink聯(lián)合仿真結構框圖。
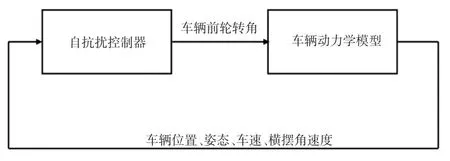
圖6 聯(lián)合仿真框圖
利用CarSim提供的某款C-Class Hatchback車型進行控制器聯(lián)合仿真驗證,車輛主要參數(shù)如表1所示。

表1 車輛參數(shù)
4.1 對接路面工況
車輛以縱向速度30 m/s在對接路面進行緊急避讓路徑跟蹤測試,其中CarSim可以方便地設置路面附著系數(shù),圖7所示為CarSim建立的對接路面3D圖。
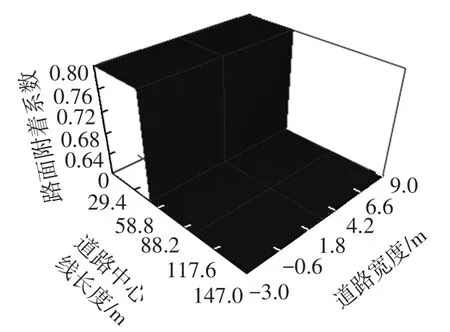
圖7 對接路面3D圖
經(jīng)不斷調(diào)整,得到自抗擾控制器參數(shù)為:r=120,h=0.001,β01=600,β02=1.2×105,β03=8×106,a1=0.5,a2=0.5,δ=0.5,b0=15,β1=1.5,β2=2,α01=0.25,α02=1,δ0=0.01。圖8所示為車輛在對接路面的緊急避讓路徑跟蹤結果,車輛在對接路面行駛時,基于曲率設計的跟蹤控制器能夠控制車輛跟蹤規(guī)劃的理想避讓路徑。
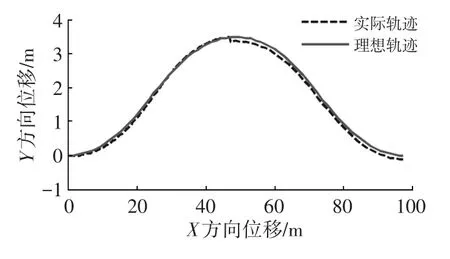
圖8 路徑跟蹤結果
圖9所示為CarSim給出的緊急避讓過程中車輛左、右前輪轉(zhuǎn)角變化曲線,整個避讓過程中車輛實際行駛路徑曲率能夠快速、準確、無超調(diào)地跟蹤規(guī)劃的理想曲率。圖10所示為車輛實際行駛曲率跟蹤理想規(guī)劃曲率結果,整個避讓過程中路面附著系數(shù)變化引起的外界干擾量可以通過擴張狀態(tài)觀測器觀測獲得,如圖11所示,自抗擾控制器能夠補償干擾量,保證路徑跟蹤魯棒性。
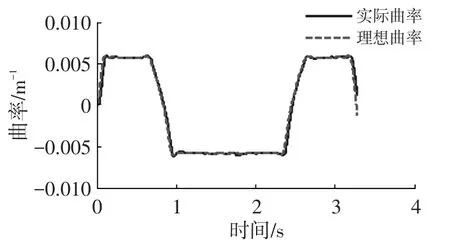
圖10 路徑曲率變化
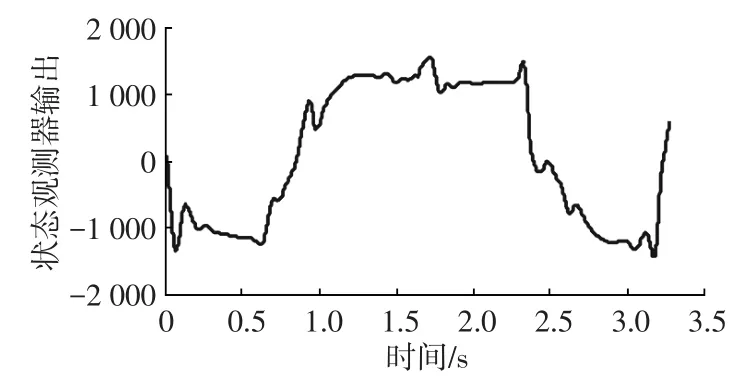
圖11 擴張狀態(tài)觀測器輸出擾動量
自抗擾控制器需要調(diào)節(jié)參數(shù)多,參數(shù)整定困難,但一經(jīng)調(diào)試完成后不需要進行二次調(diào)整,在自抗擾控制器參數(shù)不變的情況下,進行對開路面測試。
4.2 對開路面工況
以縱向速度30 m/s在對開路面行駛,利用CarSim提供的輪胎與路面附著系數(shù)接口IMP_MUX_L1、IMP_MUX_R1、IMP_MUX_L2、IMP_MUX_R2可以設置車輛兩側(cè)路面附著系數(shù),路面附著系數(shù)變化如圖12所示。
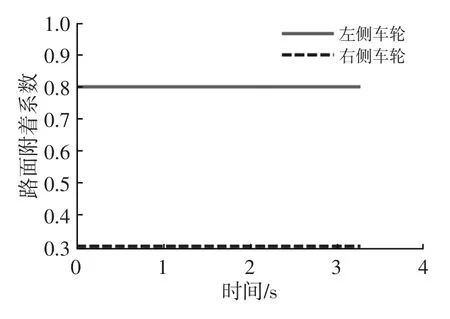
圖12 路面附著系數(shù)變化
圖13所示為車輛在對開路面進行緊急避讓路徑跟蹤時的跟蹤結果,從圖13中可以看出,車輛在對開路面行駛時,基于曲率設計的跟蹤控制器能夠控制車輛跟蹤規(guī)劃的理想避讓路徑。
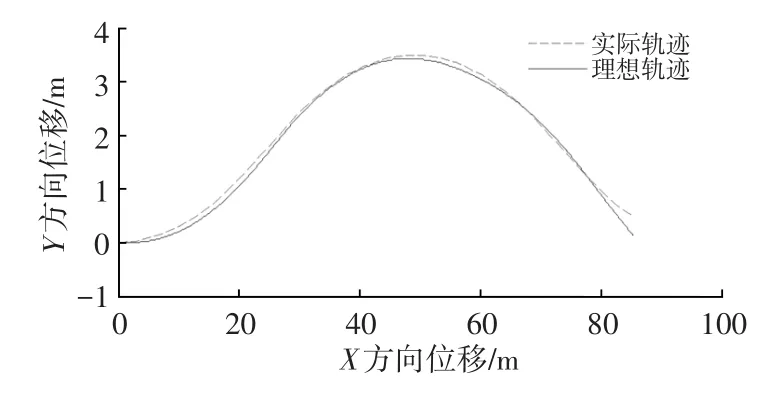
圖13 路徑跟蹤
圖14所示為CarSim給出的緊急避讓過程中車輛左、右前輪轉(zhuǎn)角變化曲線,整個避讓過程,車輛實際行駛路徑曲率能夠快速、準確、無超調(diào)地跟蹤規(guī)劃的理想曲率。圖15所示為車輛實際行駛曲率跟蹤理想規(guī)劃曲率結果,整個避讓過程中路面附著系數(shù)變化引起外界干擾量可以通過擴張狀態(tài)觀測器觀測出來,如圖16所示,自抗擾控制器能夠補償干擾量,保證路徑跟蹤魯棒性。
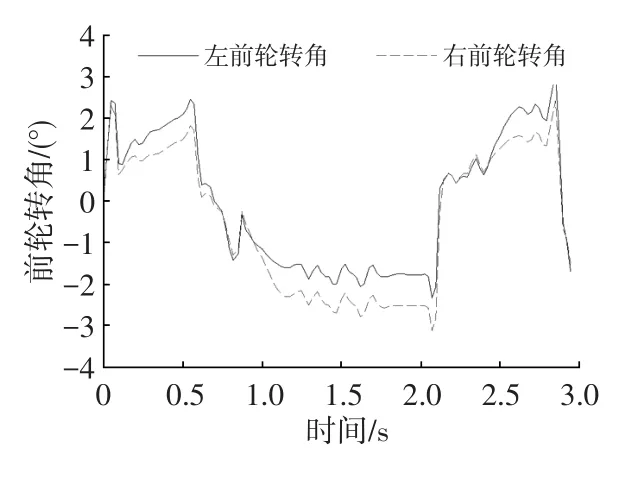
圖14 前輪轉(zhuǎn)角變化
整個緊急避讓過程可以通過CarSim后處理進行仿真演示(見圖17),汽車能夠安全無碰撞地避讓前方車輛及其障礙物。
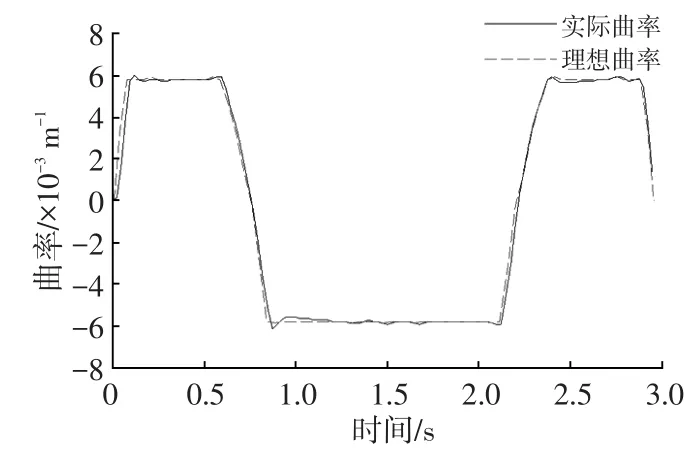
圖15 路徑曲率變化
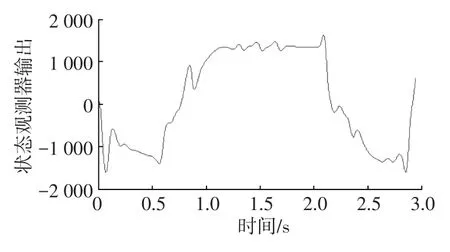
圖16 擴張狀態(tài)觀測器輸出擾動量
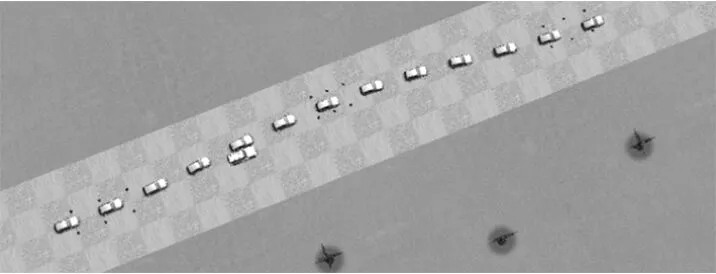
圖17 車輛高速避讓過程演示
5 結論
基于曲率設計的路徑跟蹤控制器設計簡單,能夠保證車輛實際行駛軌跡曲率跟蹤理想規(guī)劃的曲率;基于曲率設計的自抗擾控制器能夠觀測并補償外界路面附著系數(shù)引起的干擾,保證路徑跟蹤魯棒性;自抗擾控制算法簡單、便于工程應用,參數(shù)魯棒性強,但是需要調(diào)整參數(shù)多,參數(shù)整定困難。