波浪下“藍鯨”號起重船系泊吊裝組塊耦合運動響應
2019-05-25 06:57:24朱紹華1于文太1李廣帥1季紅葉駱寒冰
中國海洋平臺 2019年1期
朱紹華1, 于文太1, 李廣帥1, 季紅葉, 謝 芃, 駱寒冰
(1.海洋石油工程股份有限公司,天津 300461; 2.天津大學 建筑工程學院,天津 300350)
0 引 言
在系泊起重船吊裝海洋平臺大型上部組塊時,現場風、浪、流等海洋環境條件復雜。如果上部組塊運動幅度較大,其將不能被正常安裝到導管架上,影響現場施工進度。在嚴重情況下,劇烈的組塊運動會威脅海洋平臺結構物和現場施工人員的安全。隨著需吊裝的上部組塊質量的逐漸提高,合理分析預報施工時吊物的運動響應,可有效指導現場安裝作業,提高作業效率及安全性。開展波浪下系泊起重船與吊物的耦合運動研究具有重大的理論意義和工程應用價值。
近年來國內專家學者對起重船-吊物系統的耦合運動做了一定的研究工作。董艷秋等[1]研究起重船在波浪中作業時吊物系統的動力響應,建立在起吊過程中重物運動的非線性微分方程,采用新切片理論在頻域內得到船體的運動,用Runge-Kutta方法在時域內求得重物在空間的動力響應和吊索的動張力。汪娟娟等[2]利用 MOSES 計算軟件,分析船舶-吊物耦合系統的運動特性。通過改變起吊要素,分析這些要素對吊重運動和船體運動的影響,以及吊重擺動與船體橫搖運動的相互影響。駱寒冰等[3]對在涌浪環境下船舶-吊物耦合運動進行數值模擬,并對波浪周期、吊高、浪向等主要因素進行敏感性分析,并提出降低吊裝組塊運動響應的建議措施。許鑫等[4]以一艘半潛式起重船為研究對象,分別用數值模擬和模型試驗的方法研究其空鉤和最大起重時在波浪作用下的運動性能。
波浪下系泊起重船吊裝的耦合運動響應規律復雜,涉及船舶和吊物兩個剛體以及系泊系統和吊纜等柔性體。探索系統的耦合機理并合理預報運動響應特性,具有一定的挑戰性。本文依托東海實際吊裝施工項目,采用水池模型試驗和數值模擬方法,研究波浪下系泊起重船吊裝耦合系統運動響應。
1 海上吊裝施工項目介紹
本研究主要依托東海黃巖孔雀亭A/B組塊項目。孔雀亭氣田位于東海大陸架上,在上海市東南方向397 km處,屬黃巖滾動開發項目中的平北黃巖油氣田二期,海域水深80 m左右。孔雀亭WHPA組塊重約3 300 t,WHPB組塊重約2 600 t。采用系泊起重船吊裝作業方式安裝上部組塊,現場作業船選用“藍鯨”號起重船,最大起重能力為7 500 t,該項目于2016年5月-6月施工作業并順利完成安裝。
在海上吊裝作業前,需根據吊物質量和海洋環境氣象條件,選擇合適的起重作業船,確定拋錨就位方案。在吊裝施工時,對于有采氣樹的導管架平臺,需保證組塊井口區域與采氣樹之間具有足夠的安裝間隙。組塊至少需吊至高于采氣樹頂部3 m的高度后實施套采氣樹操作,組塊不能與采氣樹發生任何碰撞。最后,根據OWS氣象預報和現場實際海況條件,選擇在合適的氣象窗口條件下進行吊裝作業。
以“藍鯨”號起重船吊裝孔雀亭WHPB組塊為例,吊裝步驟為:(1)“藍鯨”在安裝位置北側東西向上就位;(2)組塊運輸駁船靠“藍鯨”左舷;(3)“藍鯨”在吊機全回轉工況下在舷側起吊,運輸駁船離開“藍鯨”;(4)“藍鯨”帶組塊向南絞船至安裝位置;(5)組塊套井口施工。在上述施工過程中:當組塊從駁船上起吊運輸時,組塊重心的起吊高度距水面約25 m;在套井口安裝狀態下,組塊重心的起吊高度距水面約48 m。25 m和48 m吊高分別是組塊在吊裝安裝過程中的最低和最高典型高度。
2 水池模型試驗
2.1 模型參數及工況介紹
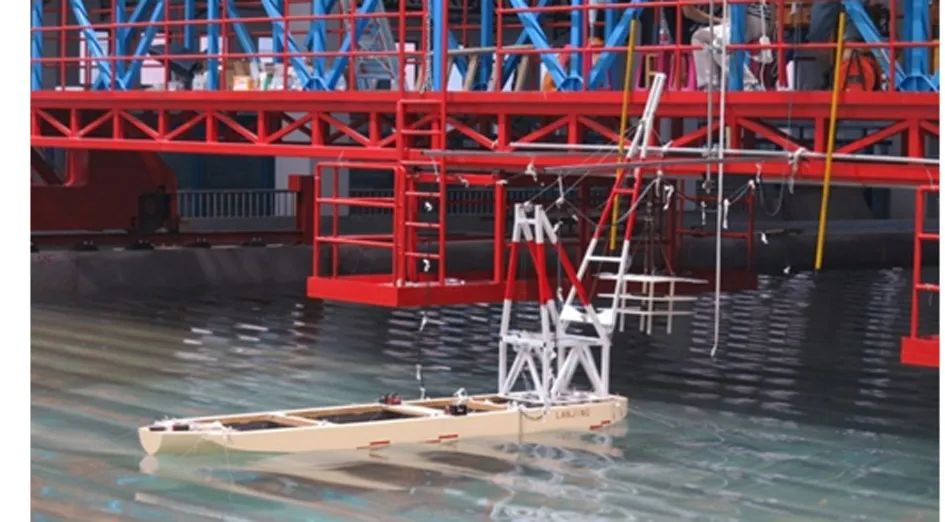
圖1 系泊起重船吊裝試驗模型
模型試驗于天津大學港口與海洋工程試驗水池進行,水池的長、寬、深尺寸分別為55.0 m、40.0 m、1.8 m,造波區域寬度為24.0 m。模型縮尺比選擇1∶60,試驗水深為1.33 m,模擬東海80 m水深。試驗測試船舶和組塊的6個自由度運動、波浪波高、錨纜系泊力等參數,采樣頻率取50 Hz。運動響應測試采用加拿大NDI Optotrak Certus 三維動態非接觸光學測量系統,最高精度可達0.1 mm,分辨率為0.01 mm(光學鏡頭距被測物2.25 m時)。系泊拉力采用威思特公司的VS16微小型拉力傳感器,量程為2 kg,精度為2 g。船舶模型采用玻璃鋼材質加工制作,上部組塊采用塑料制作,模型對吊機系統作了相應簡化。試驗模型如圖1所示。起重船及組塊的基本參數如表1所示,其中縱坐標指向艉為正。

表1 “藍鯨”號起重船及其模型基本參數
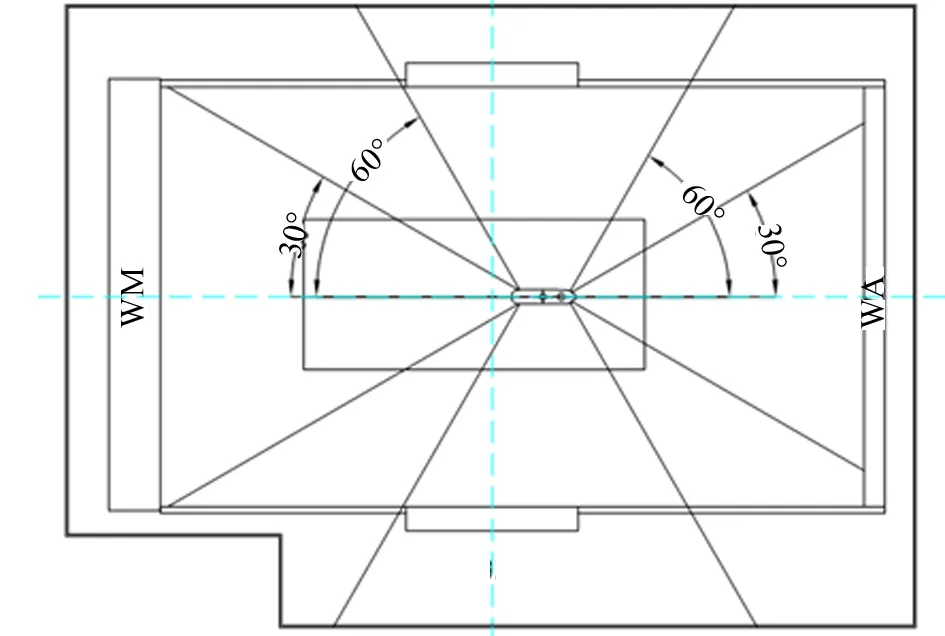
圖2 水池模型試驗系泊布置
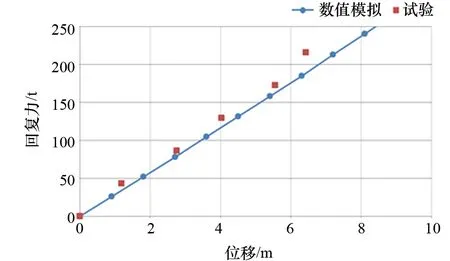
圖3 系泊系統剛度位移曲線對比
模型試驗系泊系統選取30°/60°對稱系泊布置方案,共8根纜繩,每根纜繩的實船長度不小于1 000 m。模型試驗系泊系統布置如圖2所示。水池左側布置造波機(圖中標示“WM”),右側布置消波器(圖中標示“WA”)。在模型試驗中,針對不同浪向、波高、周期、組塊吊物高度、系泊預張力等參數,開展規則波試驗,研究不同參數組合對耦合運動響應的影響。
2.2 系泊系統剛度位移曲線
對模型系泊系統進行總體剛度位移曲線測試,得到縱向位移剛度曲線。將試驗結果與MOSES軟件數值模擬結果進行對比,如圖3所示。所有數值都已轉化為實船尺度。結果表明兩者吻合較好。
2.3 靜水中自由衰減試驗
在正式試驗前進行靜水中的自由衰減運動測試。通過對自由衰減運動結果進行統計,得到船舶各方向運動的固有周期和阻尼因數,為后期數值模擬的修正提供依據。為了研究吊物的運動特性,模型試驗還進行吊物的自由衰減運動測試,測得吊物擺動固有周期為17.4 s。
3 數值分析方法及其模擬模型
3.1 系泊系統運動響應分析方法
根據初始系泊纜預張力、風力、流力、一階波浪力、二階波浪力確定船舶初始浮態、位置,求解船舶在時域中的運動方程為
(1)

對于系泊在水中的海洋結構物:在規則波中除了產生與波浪頻率一致的高頻振動外,還會發生偏離平衡位置的位移;在不規則波中發生長周期的漂移運動,這一運動的周期長、頻率低,被稱為低頻慢漂運動。這些現象說明,作用在海洋結構物上的波浪力有波頻下的波浪力和二階力,而二階力包括定常的漂移力(也稱平均波浪力)和低頻的緩變漂移力(也稱慢漂力)。二階力計算方法包括二階傳遞函數方法和Newman近似法。Newman近似法無需計算二階速度勢,計算效率較高,精度滿足工程需要[5]。MOSES水動力軟件采用Newman近似法分析二階力。
3.2 數值模擬模型
選用商業軟件MOSES進行數值模擬。起重船及吊物系統模型如圖4所示,起重船的系泊系統布置如圖5所示,起重船水動力網格模型如圖6所示。為提高數值模擬結果的合理性和精確性,根據模型試驗得到的無量綱阻尼系數對MOSES計算的阻尼矩陣進行修正[6]。

圖4 起重船及吊物系統數值模擬 圖5 數值模擬系泊系統布置圖 圖6 起重船計算網格模型圖
4 典型工況結果對比分析
對起重船在空鉤狀態以及有吊物狀態下的規則波測試結果進行討論,并與數值模擬結果進行對比分析。其中:吊物重3 000 t,吊物重心距水面高度為48 m,預張力為50 t,頂浪浪向,波浪周期為5~22 s,波高為1.5 m。

4.1 “藍鯨”號起重船無吊物運動分析
圖7分別為系泊船舶在無吊物狀態下縱蕩運動、升沉運動和縱搖運動的模型試驗和數值模擬對比結果,可以看出,3個自由度的結果吻合較好。其中,數值模擬采用模型試驗所測得的無量綱阻尼系數,根據試驗結果所測得的無量綱阻尼系數應用與數值模擬結果較為準確。
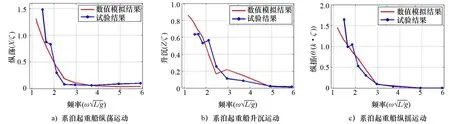
圖7 系泊起重船無吊物運動規則波結果對比
4.2 “藍鯨”號起重船吊裝組塊耦合運動分析
圖8分別為規則波情況下系泊船舶在有吊物工況下縱蕩、升沉、縱搖運動和吊物縱蕩、升沉運動結果。對比結果可知:
(1) 起重船3個自由度運動、吊物2個自由度運動的數值模擬與模型試驗結果吻合較好。
(2) 吊物縱蕩運動曲線出現1個峰,換算成實船周期約18 s,該周期與吊物自身自由擺動周期接近,說明在波浪周期接近吊物固有運動周期時,會引起吊物的共振運動。
(3) 數值模擬得到的吊物縱蕩運動與模型試驗結果對比,出現峰值的周期一致,但是數值模擬的共振點運動幅值偏大。這是由于在模型試驗時在吊物運動過程中存在吊纜與滑輪組等造成的阻尼,而在數值模擬時,MOSES軟件無法對吊物施加阻尼參數。

圖8 系泊起重船有吊物耦合運動規則波結果對比
5 結 論
針對波浪中系泊“藍鯨”號起重船吊裝組塊耦合運動問題,采用模型試驗和數值模擬方法,研究了耦合運動的特性及其機理。選擇頂浪規則波下運動響應結果,對比分析后得到如下結論:
(1) 在頂浪規則波中,對于起重船的縱蕩、升沉和縱搖運動以及吊物縱蕩、升沉運動,模型試驗與數值分析結果均吻合較好。
(2) 當頂浪波浪周期接近吊物擺動固有周期時,模型試驗和數值分析結果表明,吊物縱蕩運動出現共振,在共振周期方面,兩者吻合較好。不過,數值模擬的共振點運動幅值偏大,可能是由于阻尼原因。
本文研究揭示了波浪中系泊起重船吊裝組塊耦合運動機理。下一步將繼續對比數值模擬和模型試驗結果,提高數值模擬的精度,深入討論各個參數對耦合運動響應的影響程度,包括浪向、吊重、系泊預張力、吊高等,為海洋平臺吊裝施工作業提供技術支持。
