一種基于接收信號強度和到達角的三維組合定位方法
2019-05-23 07:07:58張瑞玲
艦船電子對抗 2019年2期
張瑞玲
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
與主動定位技術相比,被動定位技術因其隱蔽性和安全性好、成本低等優點,在無線通信、無線傳感器網絡(WSN)、衛星導航、電子偵察等領域應用廣泛。針對不同應用場景的需求,先后提出了基于到達時間差(TDOA)、到達角(AOA)、接收信號強度(RSS)和到達頻差(FDOA)等以及它們的組合定位體制[1]。隨著高鐵、無人機、新一代北斗導航系統的發展,適合于高速運動場景的定位體制越來越受到關注。在眾多的定位體制中,基于接收信號強度和到達角的定位系統,不需要精確的時間同步系統,更容易實現,更適合高速運動場景。
對于接收信號強度定位系統而言,其對各定位站的硬件要求較低且容易實現,代表性的系統有RADAR[2],QRSS[3],SpotOn[4]和Nibble[5]等。針對RSS定位體制,先后提出了很多定位求解算法。最大似然(ML)類算法雖然具有理論上最優且接近克拉美羅界(CRB)的性能,但是其實現需要多維搜索或非線性優化,計算量過大,難以應用于實時系統[1]。為此,研究人員提出很多低計算復雜度的方法,如半正定規劃(SDP)[6]、線性最小二乘(LLS)[7]、改進線性最小二乘(IILS)[8-9]等。但是,現有RSS定位方法對大的RSS估計誤差條件下性能較差,且難以應用于三維定位。
對于到達角定位系統而言,其定位精度高且無需精確時間同步系統,易于實現,代表性系統有APS[10]、SDP[11]、NCPS[12]等。與RSS定位體制類似,AOA定位體制理想最優定位求解算法亦是ML算法,但是也同樣存在運算量大的問題。其相應的低計算復雜度方法與RSS體制類似,如LLS和ILLS[1]等。但是現有的AOA定位算法主要關注二維定位,對于三維定位的研究相對較少。針對三維AOA定位,Dogancay等人[13]首先提出利用方位和俯仰角的測向偽線性估計(BOPLE)方法,該方法的突出優點是線性且易于實現,但是當測向誤差增大的時候,線性近似的誤差會引起定位性能的急劇惡化。因此,文獻[14]提出利用坐標系旋轉的方法降低近似誤差。進一步地,Dogancay等人[15]提出兩步加權輔助變量法對偏差進行補償,有效地提高了定位性能。同時,Wang等人[16]提出了約束最小二乘法,具有漸進最優定位性能。但是,現有僅利用AOA的定位方法,其性能在大的角度測量誤差情況下,難以實現高精度定位,滿足實際應用需求。
因此,針對上述僅利用RSS和AOA信息的定位,特別是三維定位,難以適應大測量誤差定位需求的現狀,本文擬結合2種定位體制的優勢,采用基于RSS和AOA的三維組合定位體制。首先,建立該定位體制的非線性定位方程;然后,利用一階泰勒展開得到近似線性定位方程;再次,為降低測量誤差的影響,提出基于加權最小二乘的定位求解算法;最后,通過仿真實驗結果表明,與僅利用角度信息的BOPLE方法和僅利用RSS信息的ILLS方法相比,在大角度和接收信號強度測量誤差的情形下,本文所提基于RSS和AOA的三維組合定位方法可以有效地實現更高精度定位。
1 定位模型
如圖1所示,三維空間中有M個可同時提供AOA(包含方位角和俯仰角)與RSS測量值的觀測站,M個觀測站的位置為sm=[xm,ym,zm]T,m=1,2,…,M。假設空間中輻射源位置為p=[x,y,z]T,則第m個觀測站與輻射源的真實方位角、俯仰角分別為:
(1)
(2)
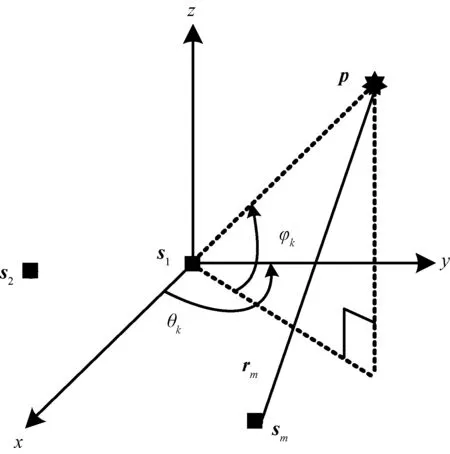
圖1 定位幾何模型
同時,令第m個觀測站接收到的輻射信號強度為Pm,由于信號強度通常受多種因素影響,直接利用信號強度的真實值意義不大,常常使用其相對值,即相對信號強度或到達增益比(GROA)。在這里,選擇第1個觀測站的輻射信號強度為參考,定義第m個觀測站的GROA為:
gm=Pm/P1
(3)
與文獻[17]類似,假設信號在自由空間視距傳播,且不存在多徑效應,則式(3)中gm可表示為:
gm=rm/r1
(4)
為了實現定位,首先需要給出該測量模型下的定位方程。由式(1)、(2)可知:
rm=[x-xm,y-ym,z-zm]T=p-sm=rmam
(5)
式中:rm=‖p-sm‖,表示第m個觀測站與輻射源的距離;‖·‖表示向量的模值;am=[cosθmcosφm,sinθmcosφm,sinφm]T,上標T表示矩陣轉置。
根據空間解析幾何理論可知:
Amp-Amsm=0
(6)
式中:Am=[b1m,b2m]T,b1m=[sinθm,-cosθm,0]T,b2m=[cosθmsinφm,sinθmsinφm,-cosφm]T
根據式(6)可知:
2p=(rmam+sm)+(r1a1+s1)=
s1+sm-(rm-r1)a1+rm(am+a1)
(7)
根據矩陣理論,容易證明(am-a1)T(am+a1)=0,將其代入式(7)得:
2(am-a1)Tp=(am-a1)T·
[s1+sm-(rm-r1)a1]
(8)
利用式(4)中GROA和觀測站與輻射源的相對距離關系,式(8)可表示為:
(1+gm)(am-a1)Tp=(am-a1)T(sm+gms1)
(9)
從而,將M個式(6)和M-1個式(9)寫成如下定位方程:
h=Ap
(10)

但是,需要注意的是,觀測值總是存在誤差的,因此,在考慮觀測誤差的情況下,基于RSS和AOA的三維組合定位方程可表示為:
(11)

需要特別注意的是,這里的觀測誤差是由前述AOA和GROA的測量誤差引起的,其分布較為復雜。
2 求解方法
通常情況下,可以假設AOA和GROA的測量誤差服從零均值高斯分布,即:
[(εθ)T,(εφ)T,(εg)T]T~N(0,Q)
(12)

由式(11)知,由于定位方程各參量間的非線性關系,e的分布很復雜,其分布特征難以利用。因此,可以考慮對式(11)中噪聲項進行一階泰勒近似,即:
(13)
(14)
B=blkdiag{B1,…,BM}
(15)
Bm=-rmdiag{cosφm,1}
(16)
Γ=[d,L]
(17)
(18)
L=blkdiag{-r2H2a1,…,-rMHMa1}
(19)
(20)
Σ=blkdiag{-r1(a2-a1)Ta1,
…,-r1(aM-a1)Ta1}
(21)
以上各式中,blkdiag和diag分別表示塊對角化和對角化。
經過式(12)的近似可知,定位方程的觀測誤差Gη近似服從均值為0,協方差矩陣為GTQG的高斯分布。因此,可以對p求得其加權最小二乘估計為:
(22)
式中:W=(GTQG)-1表示加權矩陣。

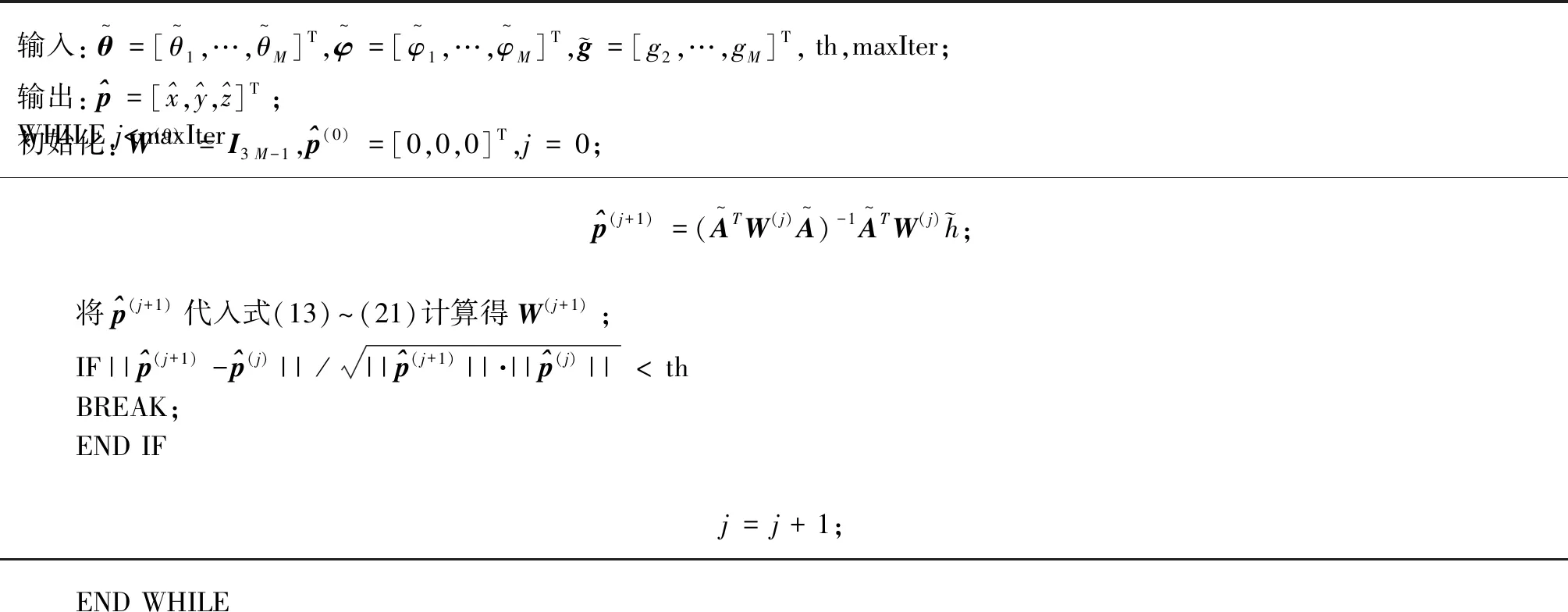
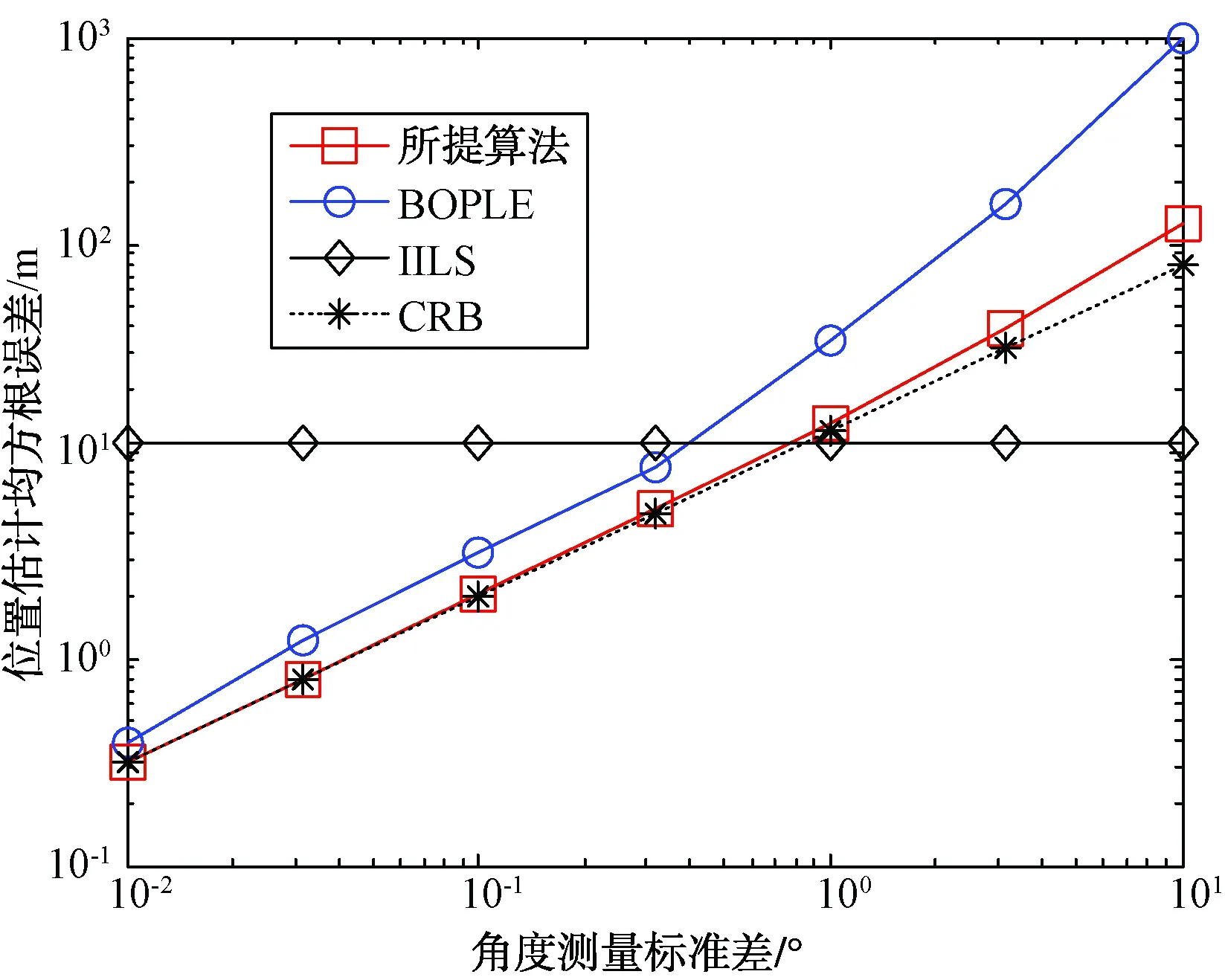
輸入:θ~=[θ~1,…,θ~M]T,φ~=[φ~1,…,φ~M]T,g=[g2,…,gM]T,th,maxIter;輸出:^p=[^x,^y,^z]T;初始化:W(0)=I3 M-1,^p(0)=[0,0,0]T,j=0;WHILE j 圖2 算法偽代碼 (23) 從而,本文所提算法的均方根誤差為: E{Δp(Δp)T}≈(ATWA)-1=[(G-1A)TQ-1G-1A]-1 (24) 其次,分析本文所提基于接收信號強度和到達角的三維組合定位體制克拉美羅界。由文獻[14]可知,CRB矩陣的逆可由下式表示: (25) (26) (27) 根據式(16)和式(26)可知: BmFm=Am (28) 接著,利用式(14)~(21)和式(26)~(27),容易導出: (29) (30) 進一步地,將式(30)代入式(25),可以得到: CRB-1(p)=E{Δp(Δp)T} (31) 因此,本文所提算法性能與克拉美羅界一致。但是需要注意的是,本文所提算法中式(13)的近似要求觀測誤差較小時才可成立。因此,由以上分析可知,當觀測誤差較小時,本文所提算法性能可以達到克拉美羅界。 本節通過仿真實驗驗證所提算法及其相關性能分析。為了更加清晰地凸顯本文所提算法性能,選擇僅利用AOA信息的BOPLE[13]方法和僅利用RSS或接收信號強度信息的ILLS[9]算法用于對比。 仿真實驗一:假設3個觀測站位置為s1=[1 000,0,0]T,s2=[0,1 000,0]T和s3=[0,0,1 000]T,輻射源位置為p=[500,500,500]T,各觀測站接收信號強度的測量值標準差均為10-3,改變AOA的測量值標準差,從10-2變化到101,每個標準差下,進行1 000次蒙特卡洛仿真實驗,統計估計的輻射源位置的均方根誤差(RMSE),所得仿真結果如圖3所示。 圖3 算法性能隨到達角測量誤差的變化關系 根據圖3可知,本文所提算法在中等和小的角度測量誤差情形下,性能與CRB一致,當測角誤差增大時,式(13)的近似誤差增大,引起較大的位置估計誤差。本文所提算法在圖中所有仿真參數條件下均優于僅利用角度信息的BOPLE算法,而與僅利用接收信號強度信息的IILS算法相比時,較小的角度測量誤差時,可以明顯改善定位性能,但是角度誤差過大時,式(13)的近似誤差增大,反而造成算法性能差于IILS算法。 仿真實驗二:固定AOA的測量值標準差為10-1,改變接收信號強度的測量值標準差,使其從10-4變化到10-1,其余仿真參數設置與仿真實驗一相同,相應的仿真結果如圖4所示。 圖4 算法性能隨接收信號強度測量誤差的變化關系 由圖4可知,與圖3類似,本文所提算法在中等以及較小的接收信號強度測量誤差情形下,性能與CRB基本一致,但是當測角誤差增大時,式(13)的近似誤差增大,位置估計誤差明顯增大。與僅利用接收信號強度信息的IILS算法相比,本文所提算法始終更優,而與僅利用角度信息的BOPLE算法相比時,由于接收信號強度測量誤差的增大會引起式(13)的近似誤差增大,進而降低算法性能,使其差于BOPLE算法。 但是,從圖3和圖4可以看出,本文所提算法,無論是大的角度測量誤差還是大的接收信號強度測量誤差條件下,都可以實現有效的估計,即所提算法具有穩健的三維定位性能。 本文結合接收信號強度定位體制和到達角定位體制二者的優勢,建立基于RSS和AOA的三維組合定位體制。首先,建立該定位體制的非線性定位方程;然后,利用一階泰勒展開得到近似線性定位方程;再次,提出基于加權最小二乘的定位求解算法,有效地降低了測量誤差的不利影響;最后,通過理論性能分析和仿真實驗結果表明,與僅利用角度信息的BOPLE方法和僅利用RSS信息的ILLS方法相比,在大角度和接收信號強度測量誤差的情形下,本文所提基于RSS和AOA的三維組合定位方法具有更穩健的定位性能。3 性能分析


4 仿真實驗與分析

5 結束語
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
兒童故事畫報(2019年5期)2019-05-26 14:26:14
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數學小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12