一種面向時間分配問題的群智能勞動分工新方法
2019-05-22 13:12:00肖人彬王英聰
智能系統(tǒng)學報 2019年3期
肖人彬,王英聰
(1. 華中科技大學 人工智能與自動化學院,湖北 武漢 430074; 2. 鄭州輕工業(yè)大學 電氣信息工程學院,河南 鄭州 450002)
在現(xiàn)實生活中經常會遇到各種各樣的分配問 題,比如資源分配[1]、收入分配[2]、資產分配[3]、功率分配[4]、任務分配[5]等,因此關于分配問題的研究得到廣泛關注。以任務分配為例,從靜態(tài)任務分配到動態(tài)任務分配,從集中式任務分配到分布式任務分配,不同的應用背景和實際需求,推動著任務分配問題研究的不斷發(fā)展[6]。
時間分配是一類重要的分配問題,旨在提高可重復使用資源的利用率。例如:在生產調度中,單機調度問題研究如何將一臺機器按時間順序分配給等待加工的工件,以提高生產效率[7-8];在交通管理中,交通信號配時研究如何在時間上將互相沖突的交通流予以分類,使其在不同時間通過交叉口[9-10]。如果將機器和交叉口看成有限資源,將工件和交通流視為主體,則時間分配問題可以界定為:將有限的資源在時間維度上進行分割,并安排各主體在不同時間段內輪流使用該資源。
作為一種典型的頗具代表性的時間分配問題,交通信號配時是緩解城市交通擁堵的關鍵環(huán)節(jié)之一[11]。在交通信號配時中,來自不同方向的交通流均可通過交叉口,而在任一時刻只能有一股或幾股互不沖突的交通流通過交叉口。因此,時間分配問題的一個顯著特點就是不同的主體按分時方式共享資源。簡而言之,時間分配問題就是將一個時間周期劃分為若干時間段,然后把時間段分配給不同的主體。任務分配問題一般指將一個總任務劃分為若干子任務,然后把子任務分配給不同的主體去執(zhí)行。基于這種相似性,任務分配方法同樣可以用來求解時間分配問題,而群智能勞動分工是實現(xiàn)任務分配的一種重要方式。
群智能指眾多簡單的主體通過交互作用所表現(xiàn)出來的宏觀智能行為[12],它是那些具有社會性特征的群居生物個體合作進行某些活動時才會產生的涌現(xiàn)現(xiàn)象。在社會性昆蟲中,不同的個體執(zhí)行不同的任務,這種現(xiàn)象叫做勞動分工[13]。群智能勞動分工是一種自下而上的任務分配方式,無需全局信息和中心控制即可實現(xiàn)有效的任務分配,而且能夠適應動態(tài)變化的環(huán)境。群智能勞動分工的這一特點吸引了眾多學者的關注,并被用于解決一些任務分配問題,比如供應鏈中的任務分配[14]、群機器人系統(tǒng)中的任務分配[15]、無線傳感網絡中的任務分配[16]、無人機群中的任務分配[17]等。此外,群智能勞動分工也被用于求解其他分配問題,比如布局問題的空間分配[18]和社會群體間的利益分配[19]。本文以交通信號配時為代表,將群智能勞動分工用于求解時間分配問題。先從時間分配的視角對交通信號配時問題進行分析,然后提出一種求解交通信號配時問題的群智能勞動分工方法,并通過實例分析與討論,闡述了面向時間分配問題的群智能勞動分工方法的優(yōu)越性。
1 時間分配視角下的交通信號配時問題分析
1.1 問題描述
交通信號配時指的是利用交通信號燈對道路上的車輛和行人進行指揮,其作用在于保障交叉口的交通安全和充分發(fā)揮交叉口的通行效率[20]。交通信號配時問題主要涉及信號相位的確定、配時參數(shù)的選擇以及運行效率的衡量3個方面。
首先,信號相位指在某個或者某幾個方向上的交通流同時得到通行權的時間帶,信號相位及其組合順序構成相位方案[21]。以普遍存在的十字交叉口為例(見圖1),其在東、西、南、北4個方向上都有左行、直行和右行3個方向的車流,圖2描述了2種常用的四相位方案。
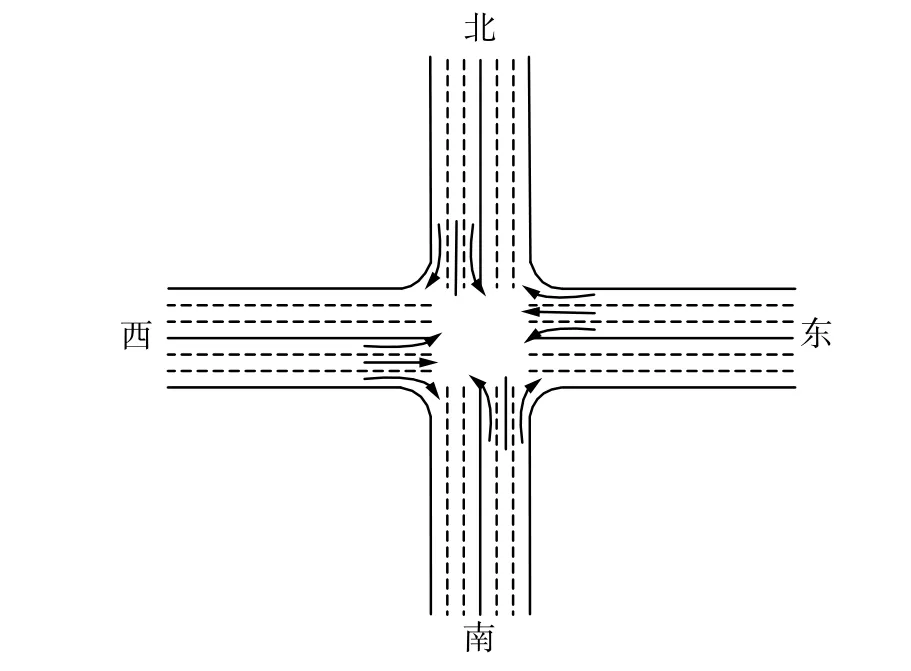
圖 1 十字交叉口Fig. 1 A sketch of the intersection
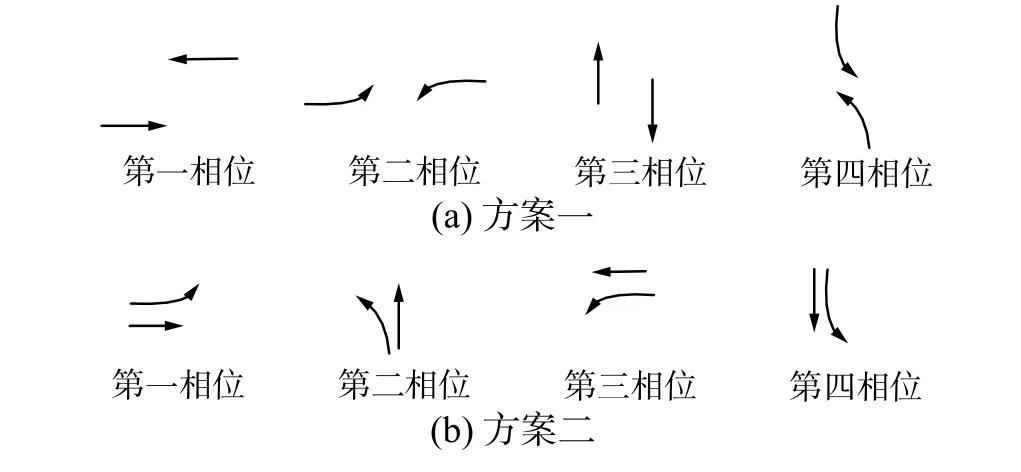
圖 2 四相位方案Fig. 2 Four phases scheme
其次,交通信號配時的主要設計參數(shù)有信號周期和綠信比[22]。信號周期指從起始相位到終止相位所經歷的時間,用C表示,單位為s。綠信比指在一個信號周期內,某一相位的有效綠燈時長x與信號周期時長C之比,一般用λ表示,λ=x/C。
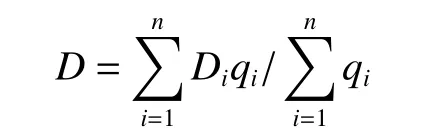
最后,配時參數(shù)下交通效益的評價指標包括延誤時間、停車次數(shù)和通行能力等,其中延誤時間和停車次數(shù)體現(xiàn)了道路使用者的利益,通行能力體現(xiàn)了道路的使用效率[23]。以第i相位為例,車輛延誤時間[24](單位為s)為

式中 Si、yi、qi、λi分別為第 i相位的飽和流量(pcu/h)、流量比、車流量(pcu/h)和綠信比。
一個周期內交叉口的車輛平均延誤時間為
車輛平均停車次數(shù)為
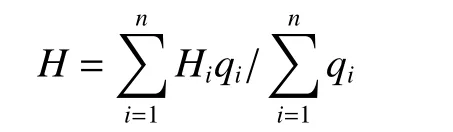
通行能力為
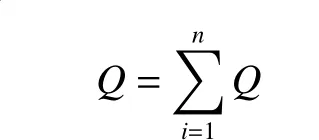
式中n為相位總數(shù)。
1.2 時間分配特性
以圖1所示的交叉口和圖2所示的相位方案為例,交通信號配時問題就是分別給4個相位的車輛分配通行權,使其在通過交叉口時保持有序狀態(tài),以減少交通擁堵、避免交通事故等。在一個信號周期內,車輛在交叉口處的通行權體現(xiàn)在綠燈時間上。因此,交通信號配時問題可以看成給各相位的車輛分配綠燈時間,是一個典型的時間分配問題。時間分配問題的顯著特點是分時使用,該特點在交通信號配時問題上表現(xiàn)為共享性和獨占性。共享性指來自不同相位的車輛均可通過交叉口,獨占性指任一時刻只能有一個相位的車輛通過交叉口。
由上述分析可知,交通信號配時問題的時間分配特性表現(xiàn)為來自不同相位的車輛分時通過交叉口。一般而言,通過交叉口的車流量是在動態(tài)變化的,既有規(guī)律性的變化(如潮汐交通),也有非規(guī)律性的變化(如汽車保有量的增加)。動態(tài)變化的車流量要求配時參數(shù)(如信號周期時長、綠燈時長等)能做出適應性的動態(tài)調整。
2 求解交通信號配時問題的群智能勞動分工方法
對于交通信號配時問題,一般以延誤時間最短、停車次數(shù)最少和通行能力最大為目標函數(shù)。常用的求解方法以智能優(yōu)化方法為主,包括遺傳算法[24]、粒子群算法[25]、蟻群算法[21]、模擬退火算法[26]等。這些算法在求解交通信號配時問題時存在收斂速度慢、效率低等問題[27],而且在不同交通場景下的求解效果差異大,說明算法的適應性較差。群智能勞動分工可以彌補這一欠缺,其顯著特點就是在動態(tài)環(huán)境下仍能實現(xiàn)有效的任務分配。據(jù)此本文從分配的視角出發(fā),利用群智能勞動分工方法來求解交通信號配時問題。下面首先引入群智能勞動分工中的激發(fā)-抑制原理,然后建立蜂群勞動分工與交通信號配時之間的映射關系,進而提出一種面向交通信號配時問題的蜂群勞動分工算法。
2.1 群智能勞動分工中的激發(fā)-抑制原理
以蜂群為代表的時間行為多型是群智能勞動分工的一種主要模式,其中個體所執(zhí)行的任務與其生理年齡有關[13]。具體的,蜜蜂在其生命周期內一般會經歷從哺育蜂到儲存蜂以及覓食蜂的一個行為發(fā)育過程,分別對應哺育、儲存食物、覓食等任務。根據(jù)蜂群的需要,蜜蜂能夠延遲、加速、甚至逆轉其行為發(fā)育過程[28]。蜜蜂在柔性發(fā)育的作用下,能夠適應動態(tài)變化的環(huán)境,從而始終實現(xiàn)有效的任務分配。
Huang等[29]在研究蜂群的時間行為多型的時候,提出了一種激發(fā)-抑制原理。該原理認為,蜜蜂的行為發(fā)育是由激發(fā)劑和抑制劑共同決定的,且二者具有耦合關系,即年長蜜蜂體內激發(fā)劑和抑制劑的含量比年幼蜜蜂多。保幼激素被認為是蜜蜂的激發(fā)劑,促進其行為發(fā)育,該發(fā)育過程伴隨著蜜蜂從巢內工作向巢外工作的轉移。蜜蜂之間進行交互時會傳遞抑制劑,對其行為發(fā)育起阻礙作用。激發(fā)劑和抑制劑共同維持著蜜蜂在不同任務上的動態(tài)分配平衡。比如:當覓食者減少時,抑制劑會減弱,巢穴內的蜜蜂會加速發(fā)育成覓食者;當覓食者較多時,抑制劑會變強,巢穴內蜜蜂的發(fā)育會被延遲,甚至覓食者會返回巢穴內工作。
激發(fā)-抑制原理以個體-個體交互的方式完成任務分配,Naug等[30]進一步描述了激發(fā)-抑制原理中個體間的交互方式,如圖3所示。蜂群中每只蜜蜂都包含1個激發(fā)劑A(Activator)和2個抑制劑I1和I2(Inhibitor)。A是蜜蜂內在的激發(fā)劑,對蜜蜂自身的行為發(fā)育起促進作用。I1是蜜蜂內在的抑制劑,不會阻礙自身的行為發(fā)育,但在個體交互過程中會對其他蜜蜂的行為發(fā)育產生抑制作用。I2是蜜蜂在交互作用中得到的外在抑制劑,會阻礙自身的行為發(fā)育。最終,激發(fā)劑A和抑制劑I2的相對水平(A/I)決定蜜蜂的行為發(fā)育是按照正常速度還是被加速、延遲或逆轉。
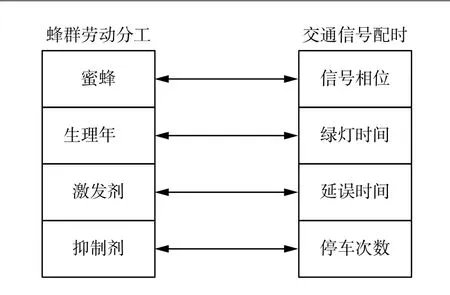
圖 4 蜂群勞動分工與交通信號配時之間的映射關系Fig. 4 The mapping relation between bee swarm's labor division and traffic signal timing
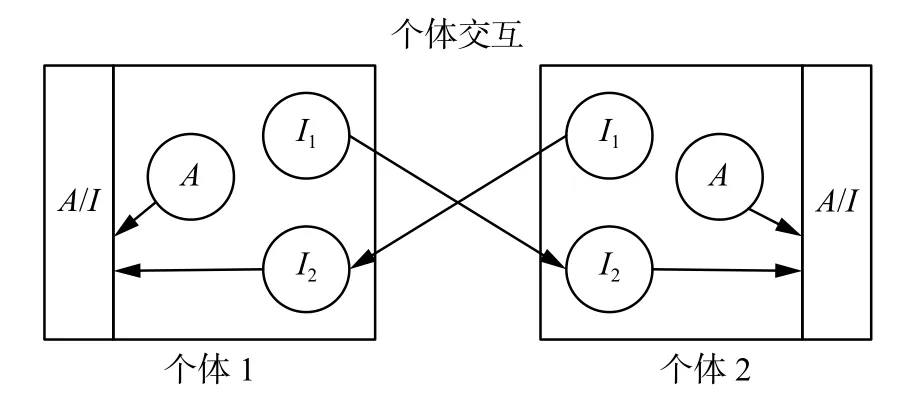
圖 3 激發(fā)-抑制原理中個體間的交互方式Fig. 3 The interaction between individuals in activator-inhibitor mechanism
2.2 映射關系
激發(fā)-抑制原理可以簡述為:激發(fā)劑促進蜜蜂生理年齡的增長,抑制劑阻礙蜜蜂生理年齡的增長,激發(fā)劑和抑制劑共同影響蜜蜂的生理年齡,從而決定蜜蜂所執(zhí)行的任務。此外,在蜂群中激發(fā)劑和抑制劑還具有耦合關系,表現(xiàn)為年長蜜蜂體內激發(fā)劑和抑制劑的含量比年幼蜜蜂多。在利用激發(fā)-抑制原理解決實際分配問題時,這種耦合關系可根據(jù)具體情況進行適當放寬。比如,文獻[31-32]利用激發(fā)-抑制原理分別設計了3種方法來解決機器人間的任務分配問題,這些方法均沒有考慮激發(fā)劑和抑制劑的耦合關系。
在蜂群勞動分工中,不同的蜜蜂執(zhí)行不同的任務完成任務分配。在交通信號配時中,不同的信號相位占據(jù)不同的綠燈時間完成時間分配。一般而言,某一信號相位的車輛延遲時間長(或者停車次數(shù)多),說明該信號相位的綠燈時間短,此時應該增加其綠燈時間。同時,在信號周期固定或有限的情況下,還應減小其他信號相位的綠燈時間。
基于上述分析,為了借鑒蜂群勞動分工的任務分配來實現(xiàn)交通信號配時的時間分配,圖4給出了勞動分工與交通信號配時之間的映射關系。該映射主要包括:1)將交叉口交通信號燈的每一個信號相位看作一只蜜蜂;2)將信號相位的綠燈時間看作蜜蜂的生理年齡;3)將信號相位的延誤時間看作蜜蜂的激發(fā)劑;4)將信號相位的停車次數(shù)看作蜜蜂的抑制劑。由于本文直接將生理年齡與分配變量時間對應起來,在激發(fā)劑和抑制劑的耦合關系中應釋放對年齡的約束,即耦合關系變?yōu)榧ぐl(fā)劑含量多的個體產生的抑制劑也多。同時,延誤時間和停車次數(shù)之間呈指數(shù)關聯(lián)趨勢[21],恰好滿足這種耦合關系。
2.3 蜂群勞動分工算法
基于圖4描述的映射關系,本節(jié)提出一種面向交通信號配時問題的蜂群勞動分工算法(bee swarm labor division algorithm, BSLDA)。BSLDA的核心要點是:某一信號相位的延誤時間越長,則其激發(fā)劑越大,在激發(fā)-抑制原理作用下,其綠燈時間將會增加;延誤時間越長,相應的停車次數(shù)也越大,則抑制劑越大,在激發(fā)-抑制原理作用下,其他相位的綠燈時間將會減小。BSLDA通過激發(fā)劑和抑制劑調整各信號相位的綠燈時間完成時間分配,具有原理簡要明晰、便于實現(xiàn)的特點。
激發(fā)-抑制原理需要對激發(fā)劑和抑制劑進行比較,而延誤時間和停車次數(shù)的量綱和量級都不同,難以直接比較。這里以經典F-B配時法的控制方案(TRRL)對應的延誤時間和停車次數(shù)為標準數(shù),建立相對性能指標。
第i相位車輛延誤時間的相對指標為

式中:n為信號相位的個數(shù),這里假設蜜蜂與其他所有蜜蜂都進行交互。
激發(fā)-抑制原理是通過激發(fā)-抑制比來控制蜜蜂的生理年齡。相應地,在BSLDA中,通過激發(fā)-抑制比來決定信號相位的綠燈時間,具體如下:
1)當 fi< α(α為上限閾值)時,相位i的綠燈時間減小,相應的減小量為

2)當 fi> β(β為下限閾值)時,相位i的綠燈時間增加, 相應的增加量為

式中 為的正相關函數(shù)。當激發(fā)-抑制比高于下限閾值時,綠燈時間增加,且激發(fā)抑制比越大,綠燈時間的增加量越大。
α≤fi≤β
3)當 時,相位i的綠燈時間保持不變。
為進一步提高算法效率,在每一次時間分配過程中,對各相位綠燈時間的變化量進行修正:當所有相位都選擇減少綠燈時間時,以最大減少量作為總的減少量,并按照減少比例分給各相位,此時信號周期變短;當所有相位都選擇增加綠燈時間時,以最大增加量作為總的增加量,并按照增加比例分給各相位,此時信號周期變長;當一部分相位選擇增加綠燈時間,而另一部分相位選擇減少綠燈時間時,通過歸一化處理,使得時間的增加量等于時間的減少量,此時信號周期保持不變;當所有相位都選擇保持綠燈時間不變時,達到一個時間分配平衡。
BSLDA在解決交通信號配時問題時,每個信號相位都有增加綠燈時間、減少綠燈時間和保持綠燈時間不變3種行為選擇。具體選擇哪一種行為,是由信號相位的激發(fā)-抑制比決定的,激發(fā)劑與信號相位自身的延誤時間有關,抑制劑與其他信號相位的停車次數(shù)有關。信號相位的激發(fā)劑、抑制劑和激發(fā)抑制比會隨著綠燈時間、交通流量以及信號周期等變化,使得同一信號相位在不同交通場景下的行為選擇不同,進而能夠適應環(huán)境的變化。
圖5描述了BSLDA的 實現(xiàn)流程,具體步驟為:
1)初始化相位方案、配時參數(shù)以及算法參數(shù),包括相位總數(shù)n、信號周期C、綠燈時間x、最大迭代次數(shù)N、上限閾值α、下限閾值β、負相關函數(shù)以 及正相關函數(shù)等;
2)根據(jù)式(3)和式(4)分別計算各相位的激發(fā)劑和抑制劑;
3)根據(jù)式(5)計算各相位的激發(fā)抑制比;
4)若所有相位的激發(fā)抑制比都落在上限閾值α和下限閾值β之間,轉至8),否則轉至5);
5)根據(jù)式(6)或式(7)計算各相位的綠燈時間變化量;
6)根據(jù)綠燈時間的修正方法確定各信號相位的綠燈時間及信號周期;
7)若達到最大迭代次數(shù),轉至8),否則轉至2);
8)輸出結果。

圖 5 蜂群勞動分工算法的實現(xiàn)流程Fig. 5 The implementation process of BSLDA
3 實例分析與討論
3.1 交通數(shù)據(jù)
本文使用的交通數(shù)據(jù)來自于2014年中國“云上貴州”大數(shù)據(jù)商業(yè)模式大賽—智能交通算法大挑戰(zhàn)。該數(shù)據(jù)描述了貴陽市南明區(qū)的主干路段在6:00~20:00時間段內通過各交叉路口的車流量情況。圖6是貴陽市南明區(qū)部分區(qū)域的簡化道路與紅綠燈位置圖,其中紅綠燈用 tli來表示。本文選取交通數(shù)據(jù)文件“flow0901”中紅綠燈ID為“tl26”和“tl30”的交通數(shù)據(jù),通過處理得到紅綠燈“tl26”和“tl30”的車流量情況,如圖7和8所示。圖7中從南進口駛入的車流整體上處于較高的車流量水平,圖8中從西進口駛入的車流整體上處于較高的車流量水平,即不同路口、不同方向的車流存在較大差異。圖7和圖8中的交通數(shù)據(jù)反映出了車流的高度動態(tài)性,對于評估信號配時方法的效果具有較強的說服力。
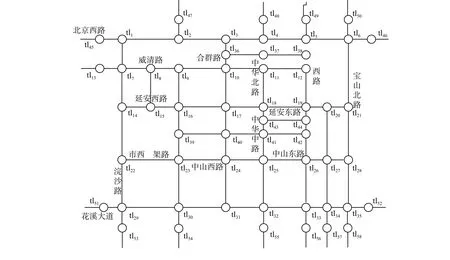
圖 6 貴陽市南明區(qū)部分區(qū)域路口簡化示意圖Fig. 6 A simplified diagram of some intersections in nanming district of GuiYang city

圖 7 紅綠燈“tl26”車流量Fig. 7 Traffic flow at the tr affic light “tl26”
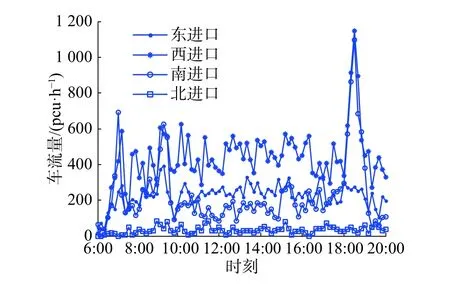
圖 8 紅綠燈“tl30”車流量Fig. 8 Traffic flow at the tr affic light “tl30”
為了體現(xiàn)信號配時方法在不同交通場景下的效果,本文選取圖7和圖8中的兩種車流量,并使用圖2中的兩種相位方案,通過組合得到4種不同的交通場景。為了方便進行相關描述,本文記圖7和圖2(a)形成的交通場景為TS1_1,圖7和圖2(b)形成的交通場景為TS1_2,圖8和圖2(a)形成的交通場景為TS2_1,圖8和圖2(b)形成的交通場景為TS2_2。
3.2 參數(shù)設置
假設車輛在交叉口處直行、左轉和右轉的比例分別為60%、20%和20%;對于紅綠燈“tl26”,東西進口道上直行車道、左轉車道和右轉車道的飽和流量分別為1 000 pcu/h、500 pcu/h和500 pcu/h,南北進口道上直行車道、左轉車道和右轉車道的飽和流量分別為2 400 pcu/h、1 200 pcu/h和1 200 pcu/h;對于紅綠燈“tl30”,東西進口道上直行車道、左轉車道和右轉車道的飽和流量分別為2 000 pcu/h、1 000 pcu/h和1 000 pcu/h;南北進口道上直行車道、左轉車道和右轉車道的飽和流量分別為1 200 pcu/h、600 pcu/h和600 pcu/h;綠燈間隔時間為4 s,黃燈時間為2 s,啟動損失時間為2 s,最短綠燈時間為5 s,最長綠燈時間為60 s。負相關函數(shù)ψ(fi)取e為底數(shù),α-fi為自變量的指數(shù)函數(shù);正相關函數(shù)φ(fi)取e為底數(shù),fi-β為自變量的指數(shù)函數(shù)。則α和β是BSLDA中影響綠燈時間分配的2個關鍵因素。
本節(jié)主要研究上限閾值α和下限閾值β對平均延誤時間、平均停車次數(shù)和通行能力3個信號配時評價指標的影響,并以此為依據(jù)設置α和β的取值。這里選取圖8中6:00~7:00、8:00~9:00和11:00~12:00三個時間段的數(shù)據(jù),它們分別代表了閑散、順暢和繁忙3種交通狀態(tài)。在圖2(a)的相位方案下,得到α和β對各項指標的影響 (見圖 9)。

圖 9 上限閾值α和下限閾值β對各項指標的影響Fig. 9 The effects of upper threshold α and lower threshold β on evaluation indicators
從圖9中可以看出,在不同的交通狀態(tài)下,上限閾值α和下限閾值β對同一指標的影響大致相同。比如,平均延誤時間隨著α的增大呈減小趨勢,隨著β的減小呈增大趨勢。這是因為平均延誤時間受信號周期的影響較大,隨著α的增大,更多的相位選擇減少綠燈時間,并且綠燈時間的減少量變大,從而使得信號周期變短,延誤時間變短;隨著β的減小,更多的相位選擇增加綠燈時間,并且綠燈時間的增加量變大,從而使得信號周期變長,延誤時間變長。平均停車次數(shù)隨著β的增大呈增大趨勢,隨著α的增大呈減小趨勢,但是在β較小時又呈增大趨勢。這是因為平均停車次數(shù)只受綠信比影響,β增大以后,更多停車次數(shù)多的相位難以通過增加綠燈時間來增加綠信比,減少停車次數(shù);α增大以后,更多停車次數(shù)少的相位會讓出綠燈時間,從而使停車次數(shù)多的相位的綠信比變大,停車次數(shù)減小;當β較小、α較大時,在每一次的分配過程中都存在增加綠燈時間和減少綠燈時間的相位,信號周期保持不變,此時的平均停車次數(shù)變大,說明當前的信號周期不是最佳信號周期。通行能力與綠信比成正比,其變化趨勢與平均停車次數(shù)相反。在本文實驗中,α選取為 0.8,β選取為 1.3。
3.3 對比實驗
為了驗證本文算法(BSLDA)的有效性,本節(jié)選擇與經典的Webster配時方法、人工蜂群算法(ABC)和蟻群算法(ACO)等群智能優(yōu)化方法進行對比實驗。求解時,先用Webster方法估計初始周期,然后利用等飽和比的方法計算各相位的大致信號配時,再用BSLDA進行分配求解。
在4種交通場景下,分別得到4種配時方法在每個小時的性能對比情況,如圖10和圖11所示。從圖10可以看出,在交叉口和交通流量相同的情況下,同一種配時方法在不同的相位方案下得到了不同的控制效果。同樣的,在圖11中也觀察到了類似的情形。這進一步說明了,TS1_1、TS1_2、TS2_1和TS2_2是4種不同的交通場景,對于評估交通信號配時方法的效果具有較強的說服力。從圖10和圖11中可以看出,BSLAD得到的計算結果比其他算法延誤時間和停車次數(shù)均有減小,并且通行能力得到了提高。
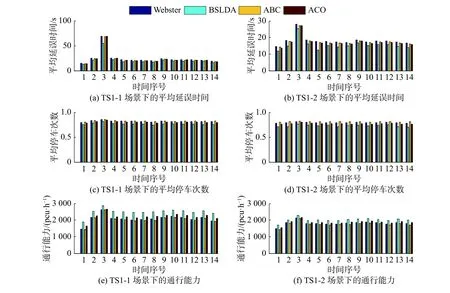
圖 10 TS1_1和TS1_2交通場景下各項指標的比較Fig. 10 Comparison of evaluation indicators in traffic scenes TS1_1 and TS1_2

圖 11 TS2_1和TS2_2交通場景下各項指標的比較Fig. 11 Comparison of evaluation indicators in traffic scenes TS2_1 and TS2_2
表1~3統(tǒng)計了4種配時方法在不同交通場景下的整體效果。從表1中可以看出,與Webster、ABC和ACO相比,本文所提方法分別減少平均延誤時間11.7%~20.3%、 7.6%~17.2%、6.7%~14.7%。從表2可以看出,與Webster、ABC和ACO相比,本文所提方法分別減少平均停車次數(shù)4.5%~8.2%、6.2%~10.0%、2.2%~5.3%。從表3可以看出,與Webster、ABC和ACO相比,本文所提方法分別提高通行量4.3%~19.6%、9.8%~24.6%、4.5%~12.8%。
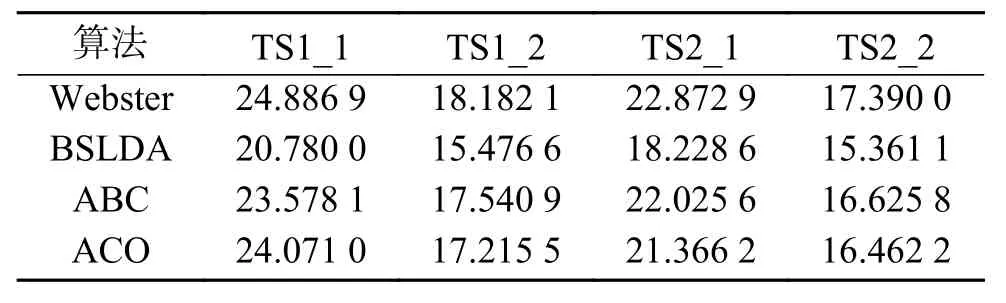
表 1 平均延誤時間對比情況Table 1 Comparison of average time delay s
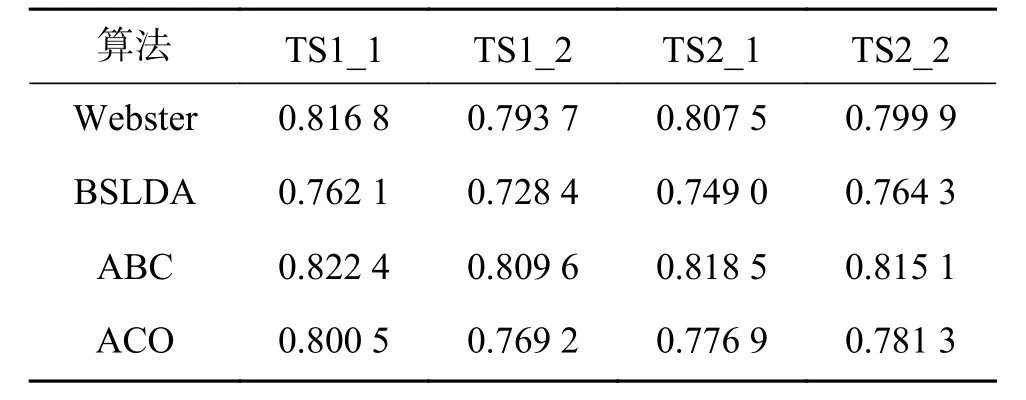
表 2 平均停車次數(shù)對比情況Table 2 Comparison of average stops 次
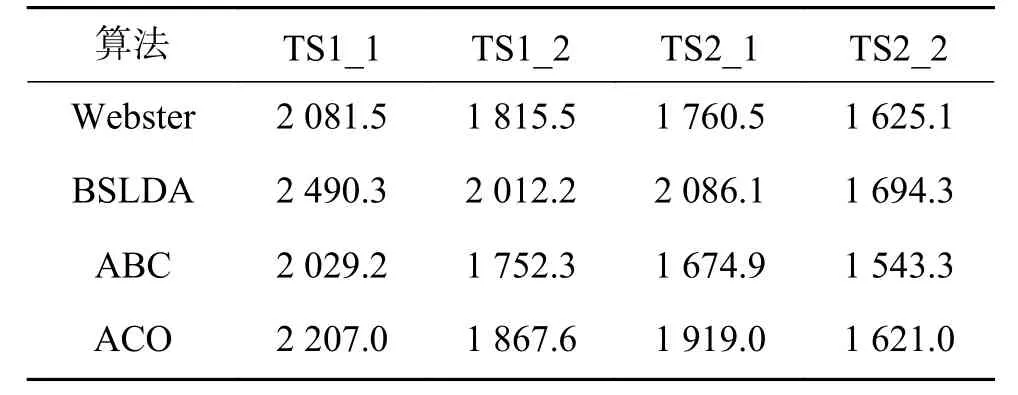
表 3 通行能力對比情況Table 3 Comparison of traffic capacity pcu/h
3.4 討論分析
交通信號配時問題可以看成給各相位的車輛分配綠燈時間,使其分時通過交叉口。對于不同相位的車輛,既有因早中晚高峰等原因造成的規(guī)律性變化,也有因汽車保有量增加等原因造成的非規(guī)律性變化。也就是說,各相位的車輛是動態(tài)變化的。這就要求分配給各相位車輛的綠燈時間不應一成不變,而應隨著車流動態(tài)變化。因此,交通信號配時問題屬于動態(tài)時間分配問題。
群智能勞動分工的顯著特點是:由于個體行為柔性產生群體分工的可塑性,在行為柔性的作用下,個體能夠根據(jù)環(huán)境變化調整所執(zhí)行的任務,從而使得族群在變動環(huán)境下仍能實現(xiàn)有效的任務分配。群智能勞動分工在動態(tài)環(huán)境下的分配柔性是蜂群等社會性昆蟲生態(tài)成功的首要原因,分配柔性這一特點也被眾多學者用于求解動態(tài)環(huán)境下的分配問題,并取得了很好的效果。
在蜂群勞動分工中,個體的行為柔性是通過激發(fā)-抑制原理實現(xiàn)的,本文所提出的方法繼承了這種行為柔性的特點。在本文方法中,每個信號相位都有增加綠燈時間、減少綠燈時間和保持綠燈時間不變3種行為選擇,信號相位的具體行為選擇是由其激發(fā)-抑制比來決定的,而激發(fā)-抑制比會隨著環(huán)境動態(tài)變化。行為柔性使得本文方法在不同的交通情況下都能實現(xiàn)有效的時間分配,圖10和圖11的比較實驗恰好證明了這一點。
約束條件下的分配問題都是在尋求一種最優(yōu)的資源配置方式,傳統(tǒng)的求解以優(yōu)化方法為主。參照文獻[6]對任務分配問題的分類,可將一般的分配問題分為確定環(huán)境下的靜態(tài)分配問題和不確定環(huán)境下的動態(tài)分配問題兩類。確定環(huán)境下的靜態(tài)分配問題或者近似靜態(tài)分配問題(比如將m個任務分配給n個主體的任務分配問題),適于采用蟻群、蜂群、粒子群等算法,這類方法求解高效。不確定環(huán)境下的動態(tài)分配問題(比如交通信號配時中的動態(tài)時間分配問題),適于采用群智能勞動分工方法,這類方法適應性強。
4 結束語
本文通過分析蜂群勞動分工和交通信號配時的特點,給出了勞動分工與信號配時之間的映射關系;在BSLDA中設計了3種行為方式,并利用激發(fā)劑和抑制劑的相互作用指導信號相位選擇恰當?shù)男袨橥瓿蓵r間分配,BSLDA在激發(fā)-抑制原理下具有柔性特點;不同交通情景下的實驗結果表明,與其他方法相比,BSLDA展現(xiàn)出明顯的有效性,適于求解不確定環(huán)境下的動態(tài)分配問題。
后續(xù)工作將從機理分析和擴展研究兩個方面展開:1)在BSLDA中,激發(fā)劑體現(xiàn)了一種正反饋作用,抑制劑體現(xiàn)了一種負反饋作用,當正反饋和負反饋達到平衡時,就實現(xiàn)了有效的時間分配,分析其反饋機理;2)將研究對象由單交叉口交通信號配時進一步擴展到干線交通信號配時和區(qū)域交通信號配時。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數(shù)學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協(xié)作信息(2018年30期)2018-11-22 06:20:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00