新型仿生球形兩棲子母機(jī)器人系統(tǒng)設(shè)計(jì)
2019-05-22 13:12:32劉羽婷郭健孫珊陳翔宇耿娜文宋伯文賴伊雯郭書祥
智能系統(tǒng)學(xué)報(bào) 2019年3期
關(guān)鍵詞:信號(hào)設(shè)計(jì)
劉羽婷,郭健,孫珊,陳翔宇,耿娜文,宋伯文,賴伊雯,郭書祥,3
(1. 天津市復(fù)雜系統(tǒng)控制理論及應(yīng)用重點(diǎn)實(shí)驗(yàn)室,天津 300384; 2. 天津理工大學(xué) 電氣電子工程學(xué)院,天津300384; 3. 日本香川大學(xué) 工學(xué)部,日本 高松 7610396)
隨著人類探索資源、開發(fā)資源、保護(hù)資源進(jìn) 程的越發(fā)深入,更加需要能在復(fù)雜環(huán)境下靈活作業(yè)的機(jī)器人。兩棲機(jī)器人作為一種性能優(yōu)越的探索設(shè)備,得到了迅猛的發(fā)展。兩棲機(jī)器人具有工作環(huán)境適應(yīng)性強(qiáng)、活動(dòng)范圍大、便于使用等諸多優(yōu)勢(shì),且可以用于執(zhí)行環(huán)境探測(cè)、采集樣品等多種任務(wù)。所以,兩棲機(jī)器人的發(fā)展與研究在諸多領(lǐng)域擁有廣闊的發(fā)展前景,并得到了世界各個(gè)國(guó)家研究團(tuán)隊(duì)的深入研究。
2016年,北京理工大學(xué)研發(fā)了一款通過(guò)模仿青蛙來(lái)控制機(jī)器人運(yùn)動(dòng)的水陸兩棲蛙板機(jī)器人。它在水下和陸地上皆采用雙擺臂的運(yùn)動(dòng)形式。在陸地運(yùn)動(dòng)依靠萬(wàn)向輪與地面的摩擦力提供推力,在水下通過(guò)擺動(dòng)尾鰭產(chǎn)生推力。該機(jī)器人的運(yùn)動(dòng)方式靈活,同時(shí)搭載了多種傳感器,具有較強(qiáng)的實(shí)用性[1]。
瑞典Rotundus公司研發(fā)了一種名為Guard-Bot的球狀兩棲機(jī)器人,其攝像頭能夠保證360°觀測(cè),機(jī)體能夠承載2 kg的物品。該機(jī)器人使用九軸穩(wěn)定系統(tǒng),同時(shí)通過(guò)裝配于球形機(jī)器人里的擺錘以保持平衡,控制機(jī)體重心[2-4]。
2014年,中國(guó)科學(xué)技術(shù)大學(xué)研制了一款兩棲機(jī)器人,采用了復(fù)合推進(jìn)結(jié)構(gòu),并為機(jī)器人設(shè)計(jì)了獨(dú)特的弧形腿,增強(qiáng)了機(jī)器人對(duì)近陸地復(fù)雜地形和水下地理形態(tài)的適應(yīng)性。該機(jī)器人進(jìn)行了推進(jìn)性能測(cè)試,能夠?qū)崿F(xiàn)多種步態(tài)的兩棲行進(jìn)[5-7]。
雖然兩棲機(jī)器人得到了迅猛的發(fā)展,但傳統(tǒng)的兩棲機(jī)器人仍然存在一些缺點(diǎn):體積較大,工作時(shí)靈活性較低,環(huán)境適應(yīng)能力差,無(wú)法滿足狹窄空間探測(cè)的需求[8-10];而體積較小的機(jī)器人續(xù)航能力較差,推動(dòng)力較小[11-13]。本文設(shè)計(jì)了一種仿生球形兩棲子母機(jī)器人控制系統(tǒng),不僅滿足可以在寬闊的環(huán)境下工作,并兼?zhèn)洫M窄地域作業(yè)的優(yōu)勢(shì),同時(shí)球形兩棲母機(jī)器人提供大容量電源,提高了續(xù)航時(shí)間。該系統(tǒng)中,母機(jī)器人在陸地上四足爬行,在水中噴水推進(jìn);子機(jī)器人的驅(qū)動(dòng)裝置為一種特殊的槳輪結(jié)構(gòu),使其在陸地上通過(guò)車輪行進(jìn),在水中使用螺旋槳推進(jìn)。上位機(jī)和母機(jī)器人采用XBee模塊進(jìn)行無(wú)線通信,子機(jī)器人和母機(jī)器人之間采用有線連接,進(jìn)行通信。
1 仿生球形兩棲子母機(jī)器人系統(tǒng)設(shè)計(jì)
1.1 系統(tǒng)簡(jiǎn)介
球形兩棲子母機(jī)器人協(xié)同控制系統(tǒng)框圖如圖1所示。該系統(tǒng)由上位機(jī)、球形兩棲母機(jī)器人及球形兩棲子機(jī)器人組成。球形兩棲母機(jī)器人上裝有XBee無(wú)線通信模塊,通過(guò)上位機(jī)軟件發(fā)送控制信號(hào),對(duì)球形兩棲母機(jī)器人進(jìn)行控制,同時(shí)可以通過(guò)母機(jī)器人將信號(hào)傳遞給子機(jī)器人,實(shí)現(xiàn)協(xié)同控制。

圖 1 球形兩棲子母機(jī)器人控制系統(tǒng)框圖Fig. 1 The block diagram of spherical amphibious motherson robot control system
1.2 球形兩棲子母機(jī)器人結(jié)構(gòu)設(shè)計(jì)
1)球形兩棲母機(jī)器人結(jié)構(gòu)設(shè)計(jì)
球形兩棲母機(jī)器人由上半球殼、底板、8個(gè)防水舵機(jī)、4個(gè)噴水電機(jī)組成。球形兩棲母機(jī)器人可以根據(jù)環(huán)境狀況的不同實(shí)現(xiàn)陸地和水下2種運(yùn)動(dòng)方式的切換,在陸地采用四足爬行的方式前進(jìn),在進(jìn)入水下后,陸地上的四足轉(zhuǎn)變?yōu)閲娝姍C(jī)的4個(gè)噴水口,切換成矢量噴水的方式推進(jìn)。球形兩棲母機(jī)器人的整體結(jié)構(gòu)如圖2所示。
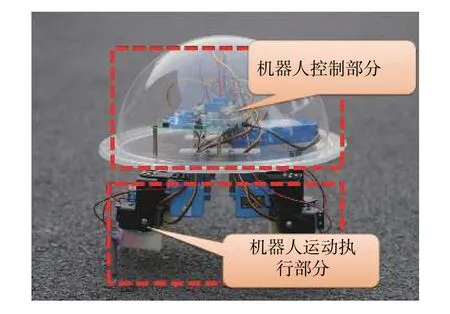
圖 2 球形兩棲母機(jī)器人結(jié)構(gòu)圖Fig. 2 The structure diagram of the spherical amphibious mother robot
球形兩棲母機(jī)器人的上球殼以及底板均是亞克力材質(zhì),其厚度都是3 mm,上半球殼的直徑為370 mm,底板結(jié)構(gòu)直徑為370 mm。噴水電機(jī)使球形兩棲母機(jī)器人在水中實(shí)現(xiàn)前行、退后、正轉(zhuǎn)及反轉(zhuǎn),其防水采用3D打印制成的防水外殼。球形兩棲母機(jī)器人底部的噴水電機(jī)整體結(jié)構(gòu)如圖3所示。
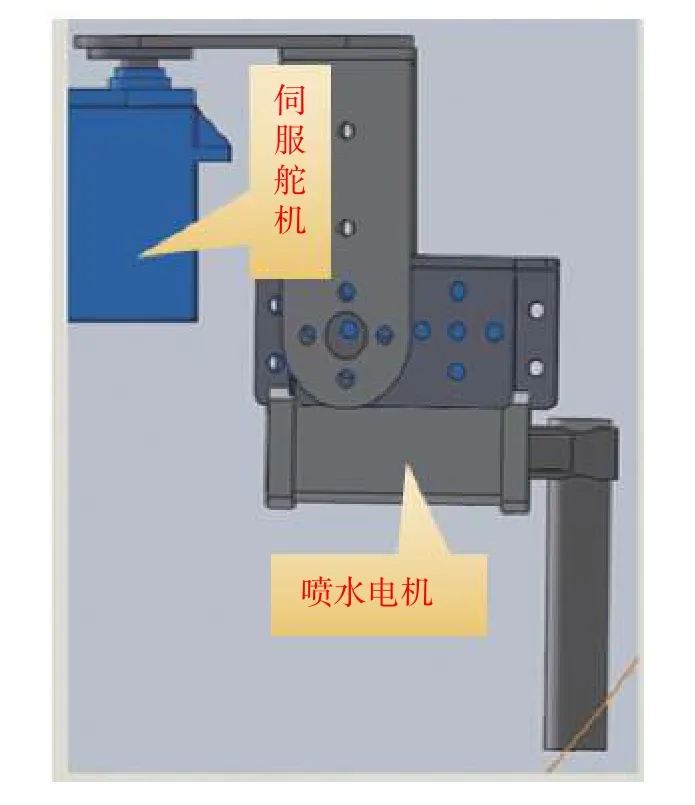
圖 3 球形兩棲母機(jī)器人噴水電機(jī)結(jié)構(gòu)Fig. 3 The structure diagram of water spray motor of the spherical amphibious mother robot

圖 5 球形兩棲子機(jī)器人釋放裝置硬件圖Fig. 5 The release device hardware diagram of the spherical amphibious son robot
1.3 球形兩棲子母機(jī)器人硬件電路設(shè)計(jì)
2)球形兩棲子機(jī)器人結(jié)構(gòu)設(shè)計(jì)
球形兩棲子機(jī)器人由球殼、底板和5個(gè)直流電機(jī)組成,如圖4所示。子機(jī)器人的球殼、底板及其密封零件都通過(guò)3D打印完成,并設(shè)計(jì)子機(jī)器人的槳葉輪,其結(jié)構(gòu)如圖4所示,將車輪與三葉螺旋槳結(jié)合,使子機(jī)器人能夠?qū)崿F(xiàn)水下和陸地的兩棲運(yùn)動(dòng)。球形兩棲子機(jī)器人在陸地采用四輪推進(jìn),在水中則采用5個(gè)螺旋槳?jiǎng)澦七M(jìn)。子機(jī)器人底部安裝有三葉螺旋槳,用于控制在水中的上浮下沉運(yùn)動(dòng)。
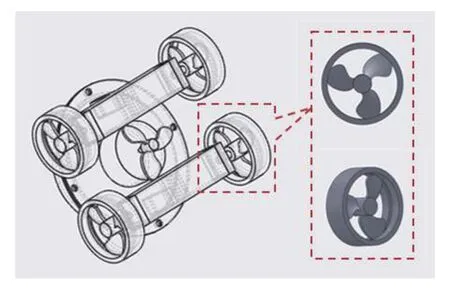
圖 4 球形兩棲子機(jī)器人及其車輪細(xì)節(jié)示意Fig. 4 The diagram of the spherical amphibious son robot and its wheel details
3)球形兩棲子機(jī)器人釋放裝置設(shè)計(jì)球形兩棲子機(jī)器人的釋放裝置是由驅(qū)動(dòng)器、搭載平臺(tái)和固定裝置組成。釋放裝置安裝在球形兩棲母機(jī)器人的底部。驅(qū)動(dòng)器采用電磁繼電器,如圖5所示,由母機(jī)器人控制,通過(guò)程序控制電磁繼電器內(nèi)銅柱的收縮。當(dāng)子機(jī)器人未釋放時(shí),驅(qū)動(dòng)器處于伸張狀態(tài),鎖定固定裝置,當(dāng)釋放子機(jī)器人時(shí),驅(qū)動(dòng)器處于收縮狀態(tài),解鎖固定裝置,完成球形兩棲子機(jī)器人的釋放。
1)球形兩棲子機(jī)器人釋放裝置設(shè)計(jì)
球形兩棲母機(jī)器人的硬件電路如圖6所示。球形兩棲母機(jī)器人采用AVR mega2560作為機(jī)器人系統(tǒng)的核心控制器,能夠通過(guò)輸出8路PWM信號(hào)控制8個(gè)伺服舵機(jī)旋轉(zhuǎn)角度和位置,處理XBee傳遞的信息,以及向球形兩棲子機(jī)器人發(fā)送控制信號(hào)。
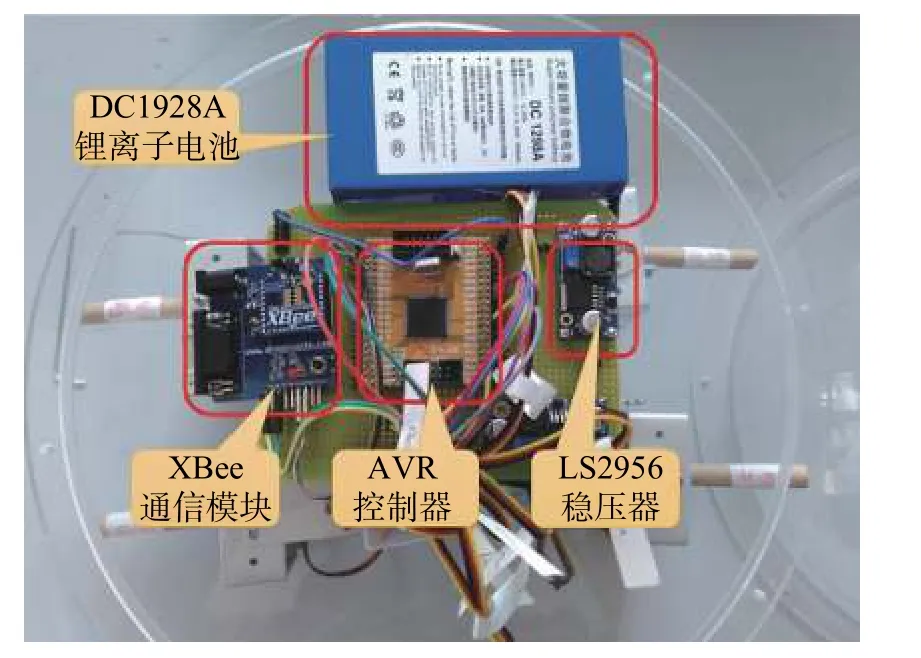
圖 6 球形兩棲母機(jī)器人硬件電路Fig. 6 Design of spherical amphibious mother robot hardware
通信部分基于XBee無(wú)線通信模塊,將其與控制器連接起來(lái),使控制部分和通信部分實(shí)現(xiàn)信息的傳遞。同時(shí)驅(qū)動(dòng)部分利用2個(gè)L298N驅(qū)動(dòng)器控制4個(gè)噴水推進(jìn)器輸出推力大小,進(jìn)而可以綜合地控制母機(jī)器人陸地和水下運(yùn)動(dòng)。
2)球形兩棲子機(jī)器人硬件電路設(shè)計(jì)
球形兩棲子機(jī)器人采用STC89C52作為機(jī)器人系統(tǒng)的核心控制器,采用5個(gè)LB1938驅(qū)動(dòng)板作為機(jī)器人的驅(qū)動(dòng)模塊。控制器STC89C52能夠通過(guò)輸出10路信號(hào)控制5個(gè)驅(qū)動(dòng)模塊,控制直流電機(jī)的轉(zhuǎn)速,同時(shí)能夠接收并處理球形兩棲母機(jī)器人發(fā)送的控制信息,發(fā)送反饋信號(hào)。通過(guò)編寫相應(yīng)程序,利用轉(zhuǎn)速差異綜合控制子機(jī)器人兩棲環(huán)境下的行進(jìn)速度與轉(zhuǎn)向運(yùn)動(dòng)。球形兩棲子機(jī)器人的硬件電路設(shè)計(jì)實(shí)物如圖7所示。
3)球形兩棲子母機(jī)器人的通信設(shè)計(jì)
球形兩棲子母機(jī)器人整體的控制系統(tǒng)框架如圖8所示。球形兩棲母機(jī)器人裝有XBee無(wú)線通信模塊,上位機(jī)向母機(jī)器人發(fā)送控制信號(hào),母機(jī)器人接收信號(hào)并反饋,實(shí)現(xiàn)上位機(jī)和母機(jī)器人之間的無(wú)線通信。
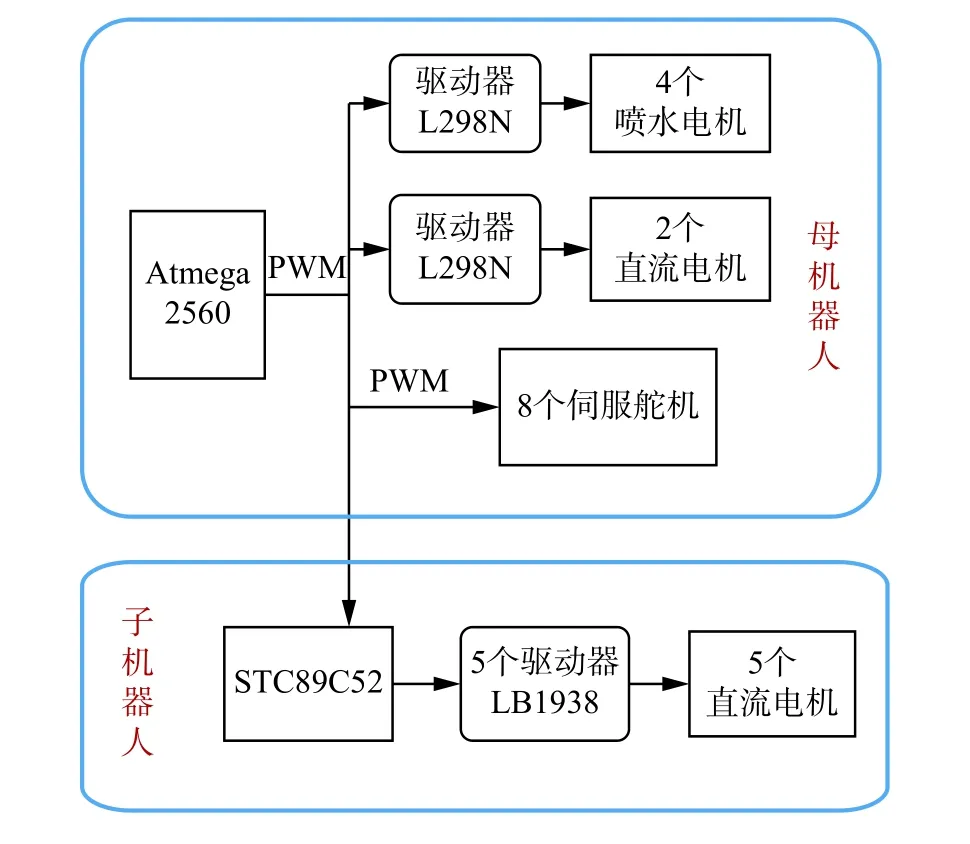
圖 8 球形兩棲子母機(jī)器人控制系統(tǒng)框圖Fig. 8 The block diagram of spherical amphibious motherson robot control system
AVR mega2560與STC89C52之間采用點(diǎn)對(duì)點(diǎn)通信。當(dāng)母機(jī)器人的通信模塊接收到控制信號(hào)之后,將其傳遞到母機(jī)器人的控制器,由控制器判斷執(zhí)行命令或?qū)⑿盘?hào)傳遞給子機(jī)器人的控制器,從而整體控制子母機(jī)器人執(zhí)行相應(yīng)的命令,滿足不同控制需求。
2 仿生球形兩棲子母機(jī)器人運(yùn)動(dòng)設(shè)計(jì)
本項(xiàng)目為球形兩棲母機(jī)器人和球形兩棲子機(jī)器人分別設(shè)計(jì)了不同的水陸運(yùn)動(dòng)方案。母機(jī)器人在陸地上采用四足爬行方式運(yùn)動(dòng),在水中則采用噴水方式推進(jìn);子機(jī)器人在陸地上采用四輪推進(jìn),在水中則采用螺旋槳推水行進(jìn)。基于該設(shè)計(jì)的球形兩棲子母機(jī)器人均具備兩棲作業(yè)能力。
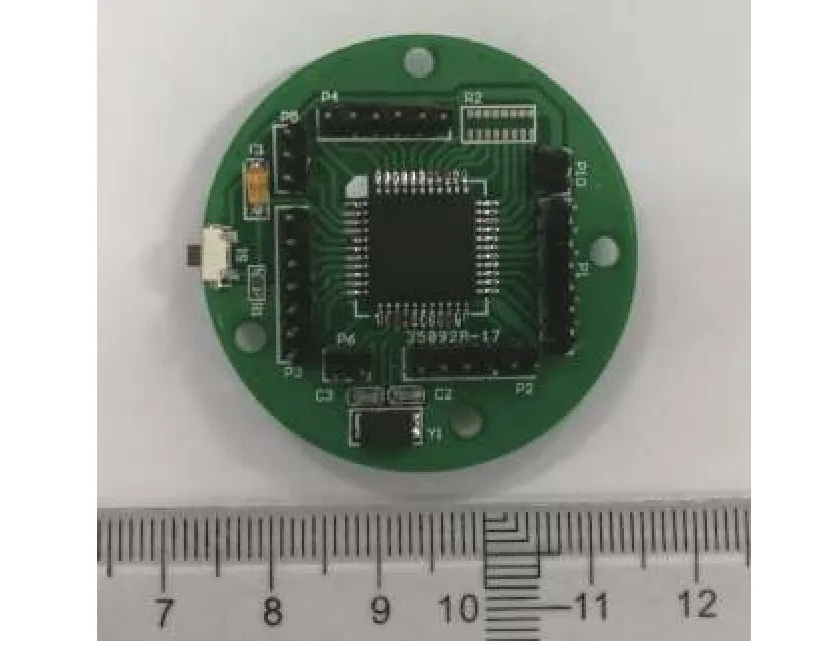
圖 7 球形兩棲子機(jī)器人硬件電路圖Fig. 7 Design of spherical amphibious son robot hardware
2.1 球形兩棲母機(jī)器人運(yùn)動(dòng)方式設(shè)計(jì)
1)球形兩棲母機(jī)器人的陸上運(yùn)動(dòng)方式
球形兩棲母機(jī)器人在陸地上采用四足爬行方式運(yùn)動(dòng),每條腿都具有垂直和水平兩個(gè)方向的自由度,由兩個(gè)伺服電機(jī)控制擺動(dòng)方向,調(diào)整角度。母機(jī)器人的運(yùn)動(dòng)步態(tài)通過(guò)控制球形兩棲機(jī)器人四足擺動(dòng)的順序控制。
球形兩棲機(jī)器人爬行步態(tài)的三維圖如圖9所示。圖中方向箭頭標(biāo)注的部分表示機(jī)器人的腿處在擺動(dòng)狀態(tài),而沒(méi)有標(biāo)注的部分表示機(jī)器人的腿處在支持狀態(tài)。由圖可見,機(jī)器人任何一周期內(nèi)都有3條腿處在支持狀態(tài),另外一條腿處在擺動(dòng)狀態(tài)。這種步態(tài)設(shè)計(jì)使機(jī)器人在爬行運(yùn)動(dòng)時(shí),任意時(shí)刻的重心都處于機(jī)器人三條腿的區(qū)域內(nèi),保證了機(jī)器人的穩(wěn)定性。
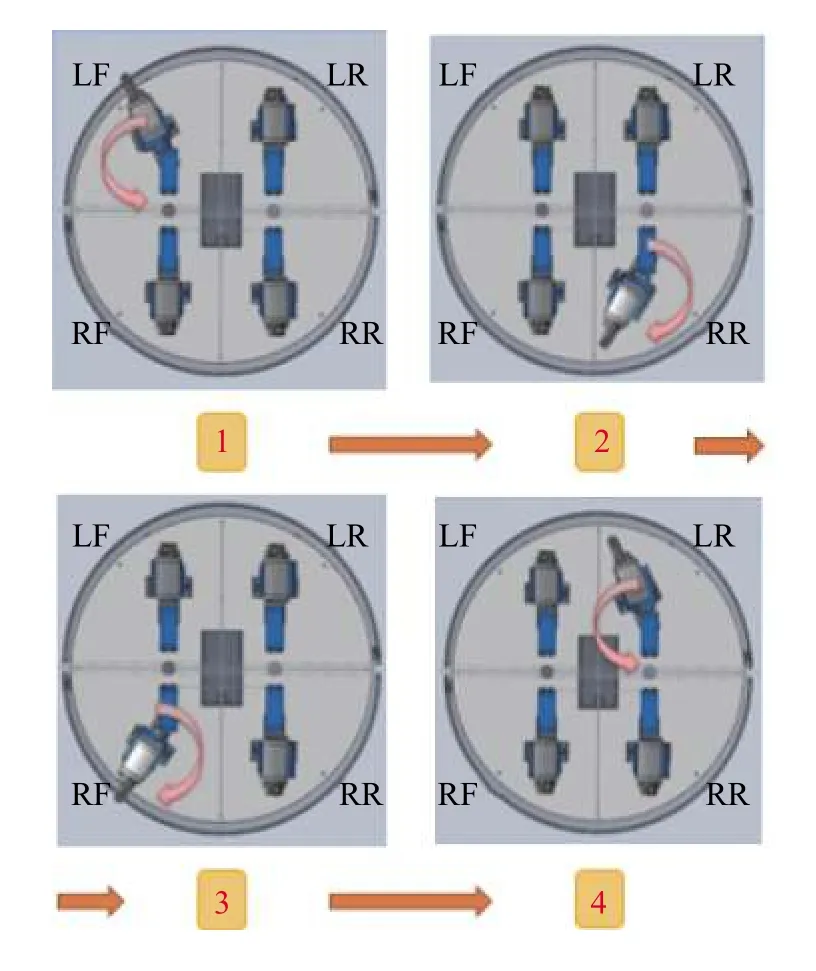
圖 9 球形兩棲母機(jī)器人爬行步態(tài)三維圖Fig. 9 The three-dimensional figure of the spherical amphibious mother robot crawling gait
2)球形兩棲母機(jī)器人的水下運(yùn)動(dòng)方式
球形兩棲機(jī)器人在水中采用矢量噴水方式推進(jìn)。通過(guò)調(diào)節(jié)AVR單片機(jī)的PWM信號(hào),可以實(shí)現(xiàn)對(duì)伺服電機(jī)旋轉(zhuǎn)角度的調(diào)節(jié),從而實(shí)現(xiàn)自由調(diào)整噴水推進(jìn)器位置的功能。通過(guò)改變噴水推進(jìn)器的輸入電壓值,調(diào)節(jié)噴水推力,從而實(shí)現(xiàn)球形兩棲母機(jī)器人在水中的前進(jìn)后退、正轉(zhuǎn)反轉(zhuǎn)和上浮下潛運(yùn)動(dòng)。
球形兩棲母機(jī)器人水下運(yùn)動(dòng)方式的三維結(jié)構(gòu)如圖10所示。
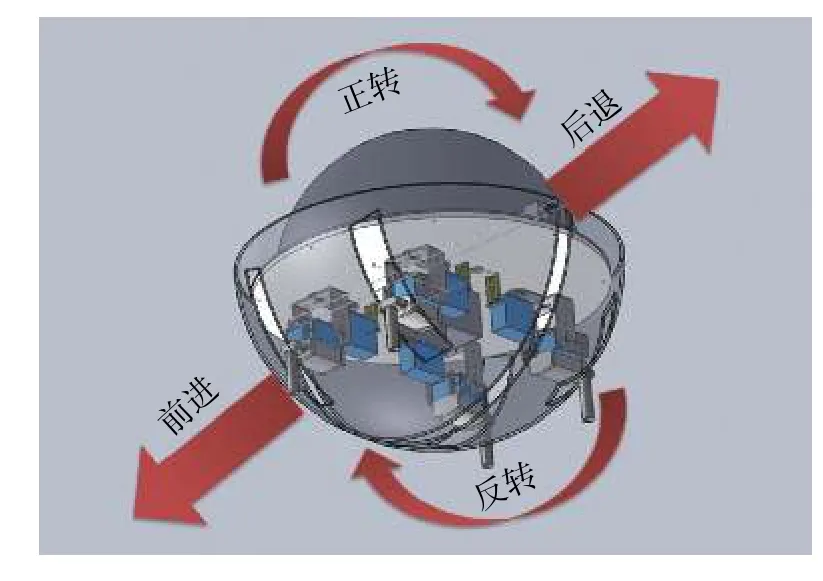
圖 10 球形兩棲母機(jī)器人水中運(yùn)動(dòng)的三維結(jié)構(gòu)Fig. 10 The thr ee-dimensional figur e of the spher ical amphibious mother r obot's movement in the water
2.2 球形兩棲子機(jī)器人運(yùn)動(dòng)方式設(shè)計(jì)
1)球形兩棲子機(jī)器人的陸上運(yùn)動(dòng)方式
球形兩棲子機(jī)器人在陸地上采用四輪滾動(dòng)方式運(yùn)動(dòng),其運(yùn)動(dòng)方式如圖11所示。每個(gè)車輪由一個(gè)直流電機(jī)控制,通過(guò)電機(jī)正反轉(zhuǎn)實(shí)現(xiàn)對(duì)每個(gè)車輪的控制,實(shí)現(xiàn)子機(jī)器人的前進(jìn)、后退運(yùn)動(dòng)。通過(guò)程序改變不同車輪的轉(zhuǎn)速,使車輪間產(chǎn)生轉(zhuǎn)速差,利用轉(zhuǎn)速差對(duì)子機(jī)器人的運(yùn)動(dòng)方向進(jìn)行調(diào)整,實(shí)現(xiàn)子機(jī)器人左右轉(zhuǎn)向的功能。
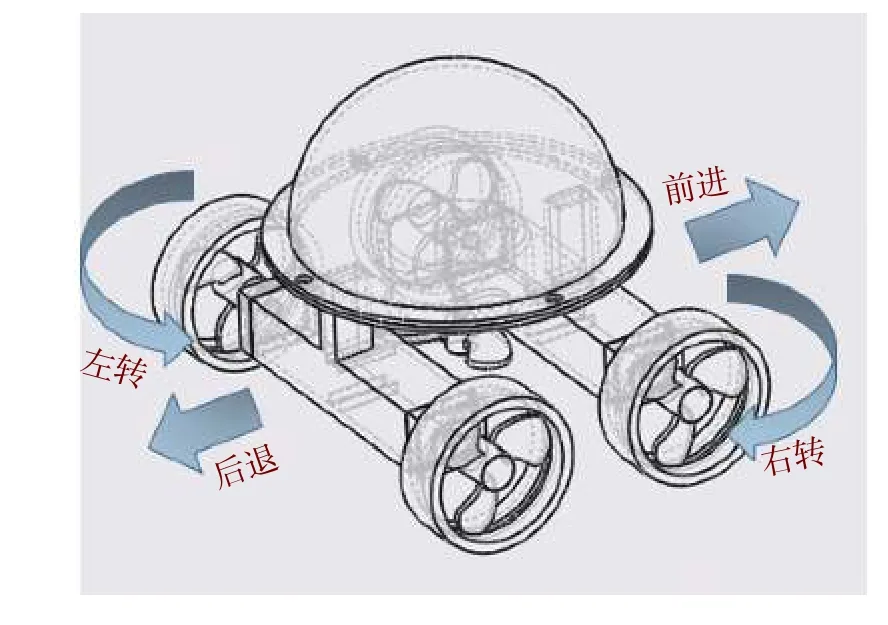
圖 11 球形兩棲子機(jī)器人陸地運(yùn)動(dòng)方式圖Fig. 11 The figur e of the sp her ical amp hibious son r obot's movement in the land
2)球形兩棲子機(jī)器人的水下運(yùn)動(dòng)方式
球形兩棲子機(jī)器人的槳葉輪在水下時(shí)通過(guò)螺旋槳?jiǎng)澦a(chǎn)生驅(qū)動(dòng)力,運(yùn)動(dòng)方式如圖12所示。水平方向上,由4個(gè)直流電機(jī)分別控制4個(gè)螺旋槳,通過(guò)調(diào)節(jié)單片機(jī)輸出的PWM波信號(hào),使不同螺旋槳產(chǎn)生轉(zhuǎn)速差,從而通過(guò)程序控制機(jī)器人在水平方向的運(yùn)動(dòng)。同時(shí),垂直方向上,在機(jī)器人底部安裝了一個(gè)三葉螺旋槳,由直流電機(jī)控制,故而可以通過(guò)編寫程序,調(diào)節(jié)底部的三葉螺旋槳的正反轉(zhuǎn)向及其轉(zhuǎn)速,調(diào)節(jié)機(jī)器人的上浮和下沉。實(shí)現(xiàn)球形兩棲子機(jī)器人在水下的運(yùn)動(dòng)。
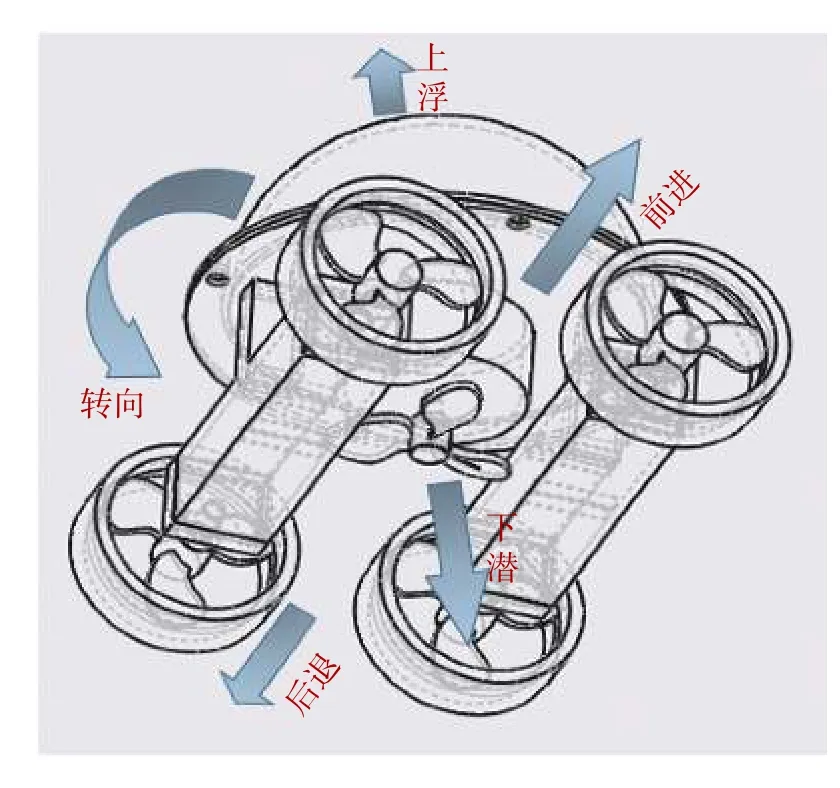
圖 12 球形兩棲子機(jī)器人水下運(yùn)動(dòng)方式Fig. 12 The figur e of the sp her ical amp hibious son robot's movement in the water
3 實(shí)驗(yàn)和數(shù)據(jù)分析
3.1 球形兩棲子母機(jī)器陸地性能測(cè)試
1)球形兩棲母機(jī)器人的陸地測(cè)試
為了評(píng)價(jià)球形兩棲母機(jī)器人的陸地運(yùn)動(dòng)特性,本文分別在不同地形下做了實(shí)驗(yàn),包括瓷磚路、大理石路、磚地以及水泥路。這些地形的特征主要在于摩擦系數(shù)的不同。
實(shí)驗(yàn)結(jié)果如圖13所示,球形兩棲母機(jī)器人在瓷磚地面上,在頻率為1.25 Hz時(shí)取得了最大速度7.6 cm/s。當(dāng)母機(jī)器人的運(yùn)動(dòng)頻率小于1.25 Hz時(shí),運(yùn)動(dòng)頻率增加,機(jī)器人的運(yùn)動(dòng)速度也增加。機(jī)器人的運(yùn)動(dòng)頻率大于1.25 Hz時(shí),運(yùn)動(dòng)頻率增加,機(jī)器人的運(yùn)動(dòng)速度反而減少。
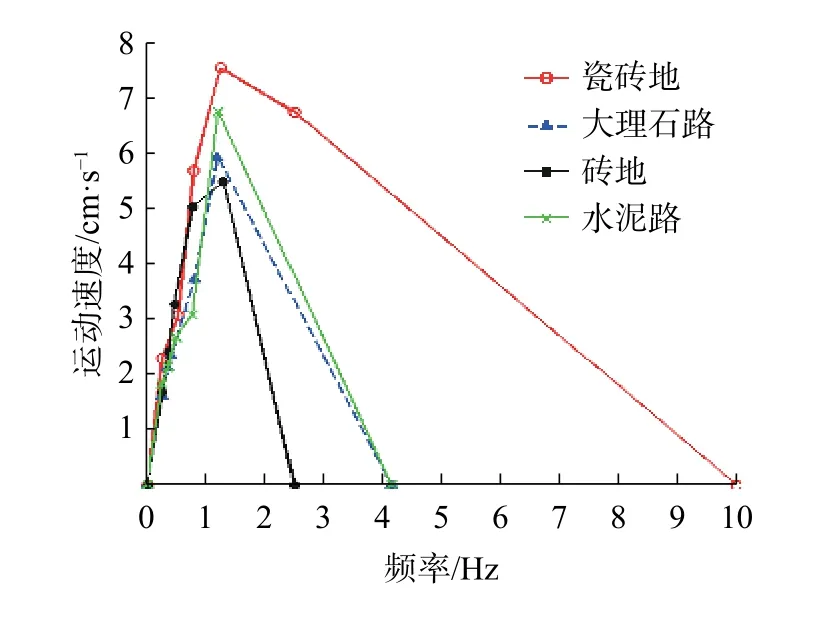
圖 13 球形兩棲母機(jī)器人陸地運(yùn)動(dòng)特性圖Fig. 13 The land movement character istic diagram of spherical amphibious mother robot
2)球形兩棲子機(jī)器人的陸地測(cè)試
為了評(píng)價(jià)球形兩棲子機(jī)器人的陸地運(yùn)動(dòng)特性,本文分別在不同摩擦系數(shù)的地形下做了實(shí)驗(yàn),包括瓷磚路、瀝青路以及磚地路面,并通過(guò)改變子機(jī)器人輸出信號(hào)的占空比測(cè)量子機(jī)器人運(yùn)行一段距離所用的平均時(shí)間,計(jì)算出在不同占空比下的平均速度。
實(shí)驗(yàn)結(jié)果如圖14所示,在沒(méi)有負(fù)載的情況下,球形兩棲子機(jī)器人在瓷磚地面上,最大速度71.4 cm/s,在瀝青路面上時(shí)運(yùn)動(dòng)速度最小,為16.1 cm/s。
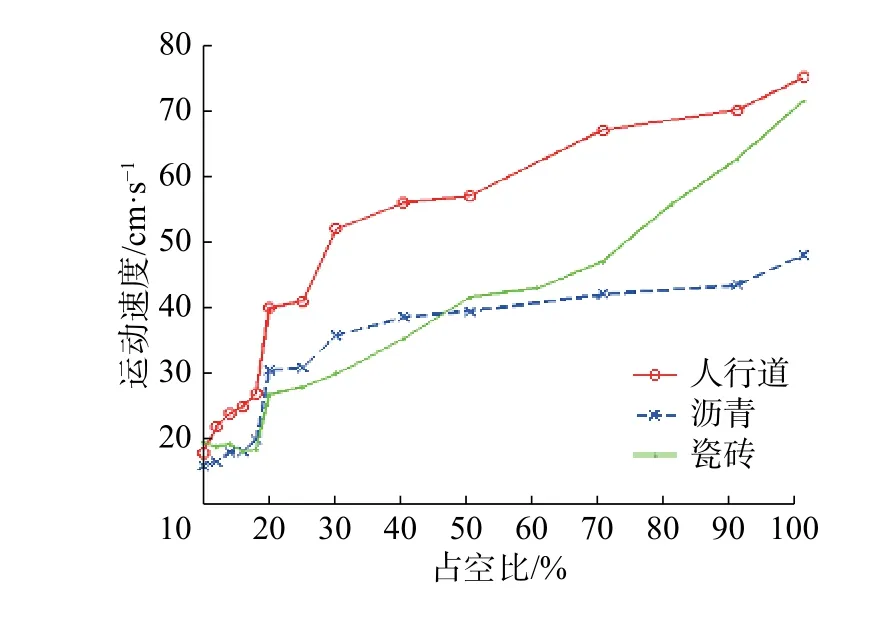
圖 14 球形兩棲子機(jī)器人陸地運(yùn)動(dòng)特性圖Fig. 14 The land movement char acter istic diagr am of spherical amphibious son robot
由圖14的占空比與速度關(guān)系的實(shí)驗(yàn)圖像可以看出,球形兩棲子機(jī)器人的路上運(yùn)動(dòng)速度與其輸出信號(hào)的占空比成正比。
3.2 球形兩棲子母機(jī)器人水下性能測(cè)試
為了測(cè)量子母機(jī)器人在水下的游動(dòng)性能,本文在泳池內(nèi)進(jìn)行了水下釋放實(shí)驗(yàn),如圖15所示。在游動(dòng)實(shí)驗(yàn)中測(cè)得球形兩棲母機(jī)器人水下前進(jìn)運(yùn)動(dòng)速度與占空比關(guān)系如圖16所示。當(dāng)噴水電機(jī)兩端的輸入電壓不斷變化時(shí),球形兩棲母機(jī)器人的速度隨著輸入的電壓增大,速度會(huì)越來(lái)越快。由于電池經(jīng)過(guò)穩(wěn)壓電源輸出的最大電壓為7.4 V,故當(dāng)噴水電機(jī)兩端輸入的電壓為7.4 V,球形母機(jī)器人水平前進(jìn)的最大速度為9.6 cm/s。子機(jī)器人前進(jìn)運(yùn)動(dòng)時(shí)速度與時(shí)間的關(guān)系如圖17所示,從圖中可以看出微型子機(jī)器人在游動(dòng)時(shí)速度不斷增加,最大速度為13.3 cm/s。

圖 15 球形兩棲子母機(jī)器人水下釋放實(shí)驗(yàn)Fig. 15 The underwater released test of spherical amphibious mother-son robot

圖 16 球形兩棲母機(jī)器人水下運(yùn)動(dòng)與占空比關(guān)系Fig. 16 The r elationship between movement speed of spherical amphibious mother robot

圖 17 球形兩棲子機(jī)器人水下運(yùn)動(dòng)速度與占空比關(guān)系Fig. 17 The r elationship between movement speed of spherical amphibious son robot
4 結(jié)束語(yǔ)
本文設(shè)計(jì)了一種仿生球形兩棲子母機(jī)器人系統(tǒng),系統(tǒng)中分別設(shè)計(jì)了球型兩棲母機(jī)器人和球形兩棲子機(jī)器人的機(jī)械結(jié)構(gòu)和硬件結(jié)構(gòu),同時(shí)實(shí)現(xiàn)了子母機(jī)器人之間的通信。球形兩棲子母機(jī)器人均能實(shí)現(xiàn)兩種運(yùn)動(dòng)的自由切換,母機(jī)器人在水下噴水式運(yùn)動(dòng),陸地上采用仿生四足爬行,子機(jī)器人在陸地上采用輪式運(yùn)動(dòng),在水下通過(guò)特殊設(shè)計(jì)的槳葉輪實(shí)現(xiàn)運(yùn)動(dòng)。球形兩棲母機(jī)器人作為球型兩棲子機(jī)器人的搭載平臺(tái)為其提供信號(hào)和能源,兩者采用有線連接,通過(guò)點(diǎn)對(duì)點(diǎn)通信實(shí)現(xiàn)信號(hào)傳遞,同時(shí)方便子機(jī)器人的回收。本文分別對(duì)母機(jī)器人和子機(jī)器人進(jìn)行陸地實(shí)驗(yàn),而且進(jìn)行了水下的釋放實(shí)驗(yàn),驗(yàn)證了系統(tǒng)設(shè)計(jì)的有效性。接下來(lái)的工作中,可通過(guò)給子母機(jī)器人系統(tǒng)增加傳感器,增加其對(duì)外部環(huán)境的感知能力,更方便地執(zhí)行任務(wù)。該系統(tǒng)在海洋探索和軍事偵察領(lǐng)域具有廣泛的應(yīng)用價(jià)值和應(yīng)用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00