無人機協助下基于SR-CKF的無線傳感器網絡節點定位研究
2019-05-22 13:12:32徐魏超王冠凌陳孟元
智能系統學報 2019年3期
徐魏超,王冠凌,陳孟元
(安徽工程大學 安徽省電氣傳動與控制重點實驗室,安徽 蕪湖 241000)
無線傳感器網絡(wireless sensor network,WSN)是一種能夠在未知環境中對特定的未知區域檢測、采集和傳輸信息的一種新興的技術。目前在國防、醫療衛生以及日常生活等領域扮演著越來越重要的角色。WSN節點位置信息在很多WSN的應用場合都是極其重要的。WSN所收集的數據信息都是建立在已知節點位置信息的基礎上展開的[1]。
由于在現實的使用過程中為了節省成本,所以不適合在所有的WSN節點中裝載全球定位系統模塊(global positioning system,GPS)[2]。現在的WSN節點定位方法中有蒙特卡洛法、DVHOP法和三邊定位法等[3-5]。文獻[6]針對三維DV-HOP WSN定位算法在實際地形中定位時誤差較大的問題,提出了一種非測距定位算法,實驗表明該算法減小了定位誤差。文獻[7]針對WSN中傳感器節點的初始位置未知的問題,提出了一種通信損耗小,設計簡單的三維定位算法,最后的仿真結果表明,該算法具有較小的節點定位誤差。文獻[8]針對標準粒子群算法進化后期收斂速度,容易陷入局部極小點等問題,提出了一種農業WSN三維定位算法。仿真結果表明,該方法的穩定性和定位精度均優于標準粒子群算法。文獻[9]針對目前WSN三維空間定位算法精度不高,穩定性差等問題,創建了一種三維定位算法3D-LE-LPCCA。最后的仿真結果表明,該算法有良好的定位精度和穩定性。文獻[10]提出了一種基于移動信標的加權最小二乘距離估計法。仿真結果表明,該方法提高了定位精度。
文獻[11]通過神經網絡來對未知節點進行定位,實驗表明RBF神經網絡具有較好的定位精度,MLP神經網絡具有最佳的計算和存儲資源。文獻[12]提出了一種新的目標跟蹤雙分布式傳感器定位系統,結果表明在一定程度上提高了定位精度。文獻[13]通過一種基于共面度單位的三維定位算法來實現定位的準確性。文獻[14]通過不相似矩陣來表示每個節點到其他節點的距離,最后的仿真結果證明了算法的有效性。文獻[15]通過引入3D Voronoi圖來劃分3D位置空間,構建虛擬信標節點的秩序來實現定位。仿真實驗表明,它可以提高復雜三維空間節點的定位精度,減少測量和計算成本。文獻[16]通過使用模糊邏輯系統(FLS)對接收信號強度(RSS)和距離之間的非線性進行建模以降低計算復雜度,并通過混合粒子群算法(HPSO)和基于生物地理學優化(BBO)進一步優化,從而最大限度的減少誤差。文獻[17]為了提高未知節點的定位精度,提出了一種基于CKF的無線傳感器網絡分布式節點定位算法。仿真結果表明,該算法具有優良的定位性能。
本文借鑒孫堯[18]所提出的用無人機作為輔助工具,結合一定的算法給WSN節點進行室外的精確定位。利用無人機在三維空間靈活的機動性和強大的計算能力,將一般利用信標節點-節點之間進行定位的方式變成了無人機-節點協作的定位方式。由于無人機的引入,會產生一定的過程噪聲,為避免濾波的發散和魯棒性的降低。本文對文獻[17]的算法進行了改進,增加了閾值選擇的更新策略。提出了一種改進的SR-CKF濾波算法。由此形成了一種在無人機協助下,利用SR-CKF對WSN節點進行精確定位的模式。
1 初步定位模型
在初步定位模型中,UAV攜帶GPS定位系統在三維空間中以一個固定的高度、軌跡和速度飛行。作為一個移動的信標節點,UAV在和未知節點建立互相通信的同時,可以周期性的發射自身的位置數據,通過RSSI測距數學模型來獲取UAV和m個未知節點之間的相對距離數據,最后未知節點的初步定位數據可以通過極大似然估計法(maximum likelihoodestimation,MLE)來獲取,初步定位系統模型如圖1所示。
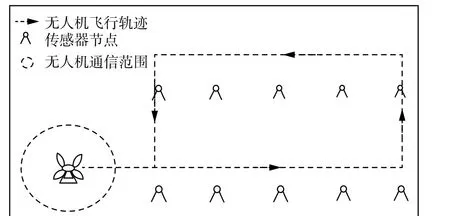
圖 1 初步定位系統模型Fig. 1 Preliminary positioning system model
1.1 RSSI測距系統模型的建立
RSSI測距數學模型的建立需要將UAV和未知節點之間互相通信,UAV作為一個三維空間的移動信標,可以假設它的最大通信范圍為R。在通信范圍內,UAV周期性的發射虛擬信標信息,未知節點接收信息。計算出UAV和未知節點之間的相對距離信息 l, 并 滿足 l ≤ R,根據傳播損耗模型建立的測距模型可表示為:

式中: d 表示發射器和接受器之間的相對測量距離; Pr(d) 為 接收器接收到的實際信號強度; di為近地的參考距離; Pi(di) 為 在 di處接收到的信號強度;γ 為信號在路徑中的衰減因子,它的大小取決于信號傳播的具體環境; Wδ為一個正態分布的高斯隨機變量。通過此模型來計算出無人機與未知節點之間的相對距離。
1.2 基于RSSI測距的極大似然法位置估計模型
當無人機飛行到未知傳感器節點區域時,無人機以設定好的高度 z 和速度 v 在未知傳感器垂直上方移動,如圖2所示。
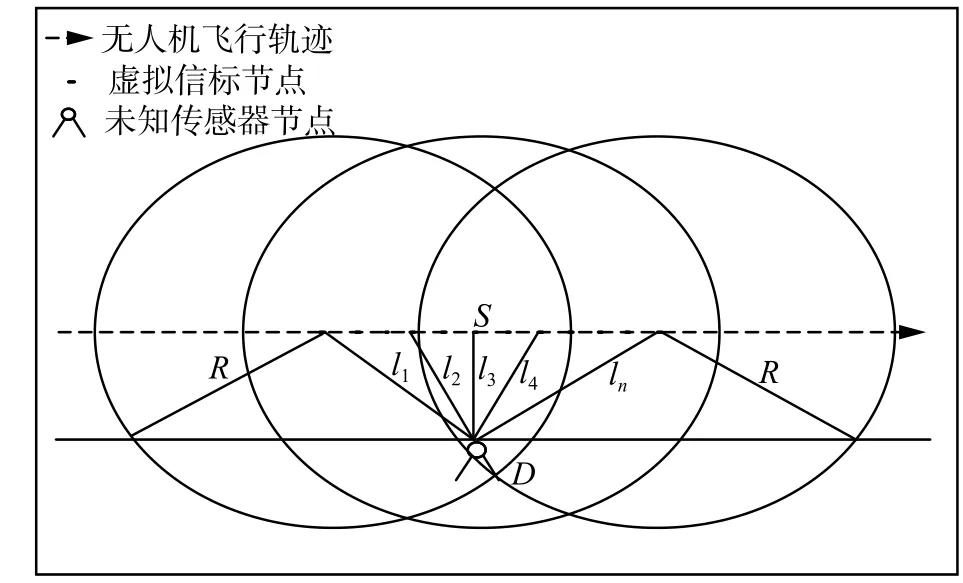
圖 2 無人機和未知傳感器節點的垂直平面圖Fig. 2 The vertical plane of UAV and unknown sensor nodes
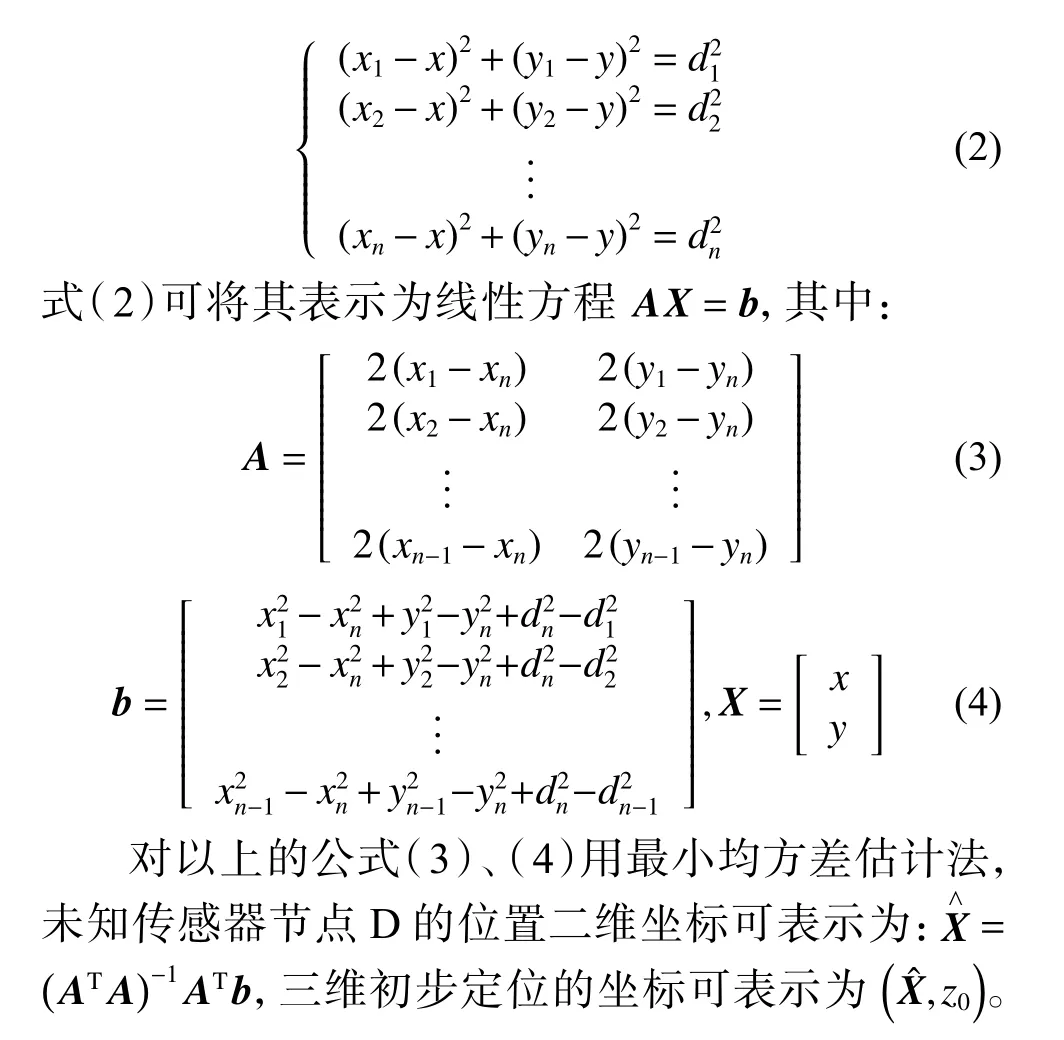
圖2中 R 為無人機的通信半徑,其通信半徑的大小取決于信號發射器功率的大小和具體環境。令無人機每隔固定的周期T廣播自身的位置信息,即每經過周期T無人機產生一個虛擬信標。 S 為無人機廣播虛擬信標過程中所飛行的距離,虛擬信標包含無人機在該時刻的實際位置。從圖中可以看出,所有的虛擬信標的通信范圍都滿足它的通信半徑不小于虛擬信標到未知傳感器之間的相對距離,即 l ≤ R 。 假設無人機經過 n 個虛擬信標,即設為 { M1,M2,···,Mn}。則無人機在每個虛擬信標對應未知傳感器節點的垂直坐標為(x1,y1,z1),(x2,y2,z2),···,(xn,yn,zn)。由圖中 可 以看 出l1,l2,···,ln為虛擬信標到未知傳感器之間的相對距離。通過1.1節的RSSI測距模型可以測得它們的相對距離。由于無人機機載GPS模塊在未知傳感器節點上空飛行,無人機在未知傳感器節點的垂直坐標 ( x1,y1,z1),(x2,y2,z2),···,(xn,yn,zn) 是已知的。另外可知當無人機在未知傳感器節點正垂直上空所產生的虛擬信標到未知傳感器節點之間的距離 l3是已知的。假設未知傳感器節點的坐標為(x,y,z0), 由于無人機的垂直海拔高度 z1是已知的,則未知傳感器節點的高度 z0是已知的,即為z0=z1-l3。其他未知傳感器節點的高度也可依此推出。只需要求得未知傳感器節點的 ( x ,y) 坐標就可以確定未知傳感器節點的初步位置。經過RSSI測距后,令無人機和未知傳感器節點D的相對距離分別是 d1, d2,···,dn,根據歐氏距離公式有如下關系式:
2 基于SR-CKF的節點精確定位算法
2.1 容積卡爾曼定位算法
容積卡爾曼濾波器(CKF)是一種新型的非線性高斯濾波算法,它的核心思想是通過時間更新和量測更新2個基本步驟來達到后驗概率密度的不斷更新。
2.2 SR-CKF濾波算法
通過在第1節中用無人機和未知節點之間建立的模型對未知節點的位置進行粗略的估計,本節在未知節點初步定位的基礎上通過平方根容積卡爾曼濾波算法對未知節點的位置進行更加精確的定位。在定位系統中設有 M (i=1,2,···,10) 個未知WSN節點,則可考慮該離散非線性系統模型為

式中: xk為 k 時 刻系統所在的狀態向量; zk為 k 時刻系統狀態所在的量測值; f (·) 為非線性系統所在的狀態方程; h ( ·) 為非線性系統的量測方程。Wk-1~N(0,R) 和 Vk~N(0,R) 分別為系統噪聲和觀測噪聲。

最后通過公式(8)可以得到未知節點的觀測更新,由于引入了UAV作為信號發射源,因此會產生一定的高斯噪聲,為了保證整個系統中未知節點的定位精度,因此加入了一種基于閾值選擇的更新策略,即將公式(6)中 χ?k|k-1上的值在更新時 設 置 一 個 閥 值 α , 當上 的 值 設 為 Dj,當Dj≥α 時 ,可令該數值保留,繼續更新。當 Dj<α,則令 Dj=0 , 即對上的值不進行更新。通過加入這種策略,有效的減少了算法運算時間,提高了未知節點定位精度和可靠性。
2.3 SR-CKF的WSN協作定位
當無人機以設定好的航跡、速度和高度飛行并周期的廣播自身的位置信息,從而和未知節點之間建立起足夠多的觀測約束,通過RSSI測距和極大似然估計獲得未知節點的近似位置,再通過SR-CKF濾波算法對未知節點進行精確定位。算法流程圖如圖3所示。
3 仿真結果及分析
3.1 MLE、CKF、SR-CKF 定位算法的比較
通過平均定位誤差(mean positioning error,MPE)對未知傳感器節點的定位精度進行相關的分析:

式中:n為未知傳(感器)節點的個數; ( xi,yi) 為未知節點的實際位置;為未知傳感器節點的估計位置。圖4分別仿真了MLE、CKF、SR-CKF 3種算法,從圖中的結果可以看出CKF的定位精度明顯優于MLE,而SR-CKF的定位精度優于CKF。
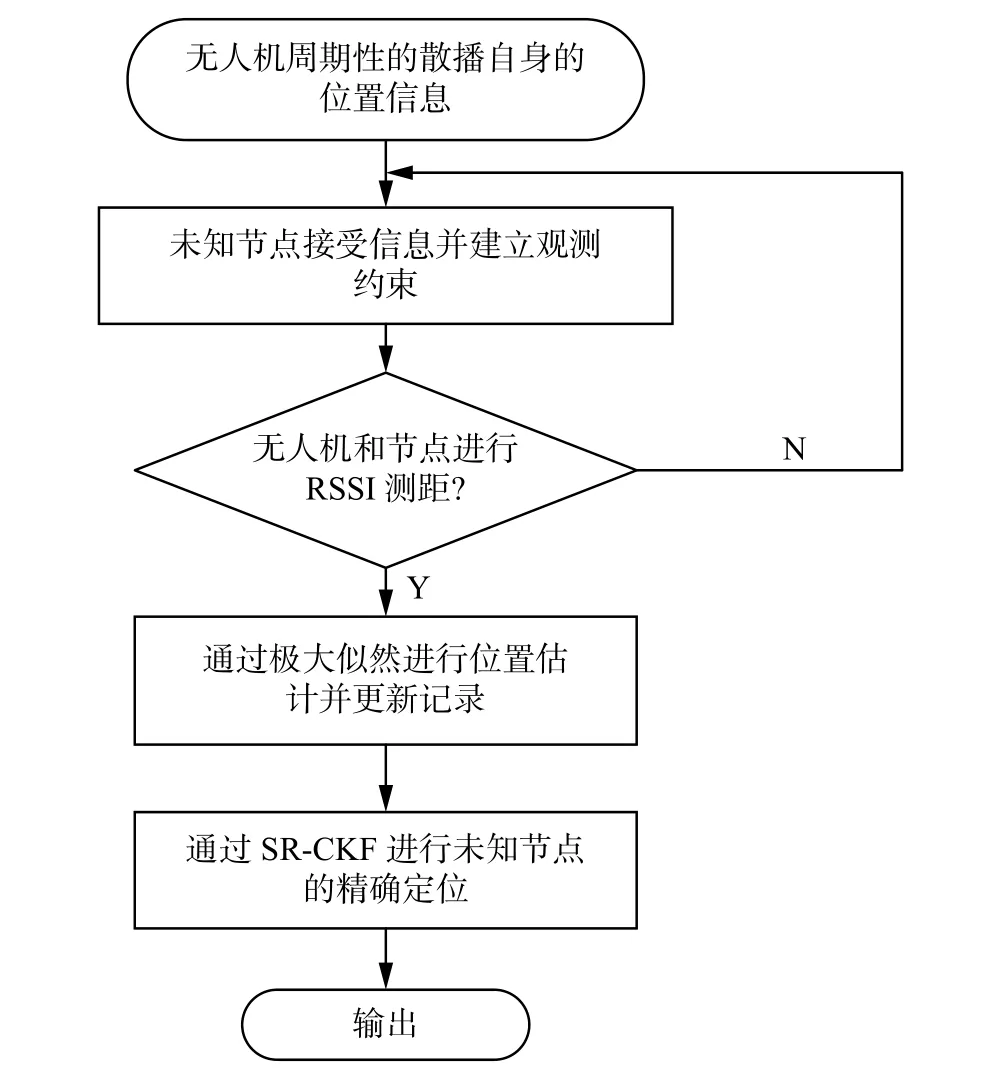
圖 3 基于SR-CKF定位算法流程圖Fig. 3 Flow chart based on SR-CKF location algorithm
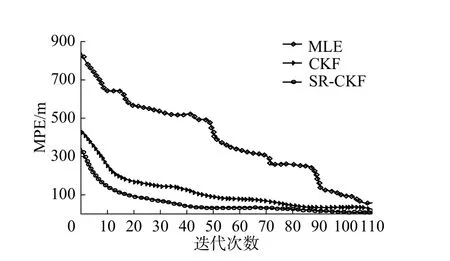
圖 4 MLE、CKF、SR-CKF定位精度對比Fig. 4 MLE、CKF、SR-CKF positioning accuracy comparison
3.2 無人機環境下的算法仿真結果分析
本文的仿真環境為90 m×70 m的室外環境,在這個環境中隨機的部署8個未知傳感器節點,無人機以1 m/s的速度,10 m的高度垂直在未知傳感器節點的上空移動,無人機每隔1 s的周期散播自身的位置信息,并和未知節點進行通信。其中測距誤差為 [ r - s·r,r+s·r],s=0.15,圖5仿真了在無人機協助下通過極大似然法對未知傳感器節點進行定位(UAV-WSN-MLE),其中“”表示未知節點的實際位置,“”表示未知節點每次采樣的估計位置。
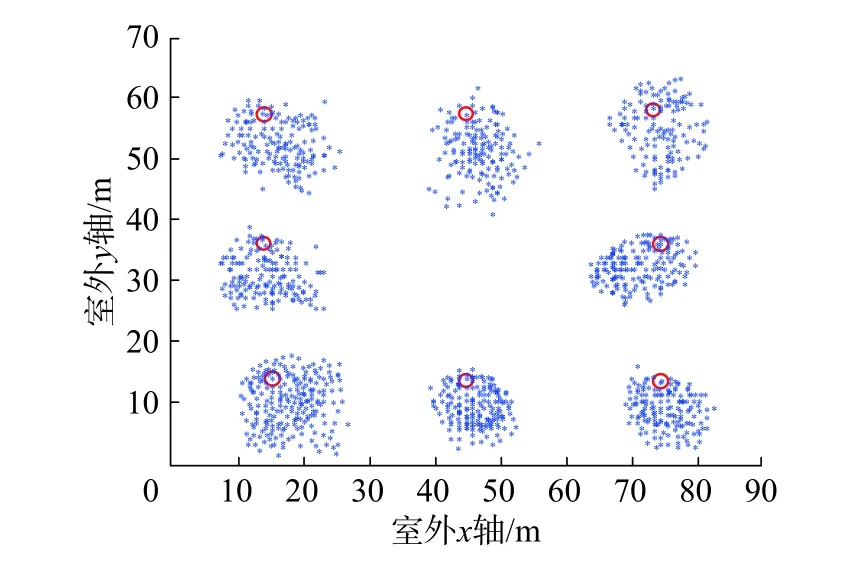
圖 5 WSN節點自定位結果Fig. 5 WSN node self-location result
圖6仿真了在WSN節點初步定位的基礎上,引入CKF對未知節點精確定位(UAV-WSN-MLECKF),其中星號“”是作為CKF算法不同迭代次數的狀態位置估計。因此從圖6中可以觀察出在相同參數下與仿真圖5中UAV-WSN-MLE算法相比,圖6中未知節點位置與實際位置的距離更小。
圖7在相同仿真參數的情況下引入了閾值選擇的更新策略,并采用了SR-CKF算法對未知節點進行了更加精確的定位(Unmanned Aerial Vehicle-Wireless Sensor Network-Maximum Likelihood Estimation-Square Root Cubature Kalman Filtering,UAV-WSN-MLE-SRCKF)。從仿真圖中可以觀察到,該算法的定位精度高于前兩者的定位精度。
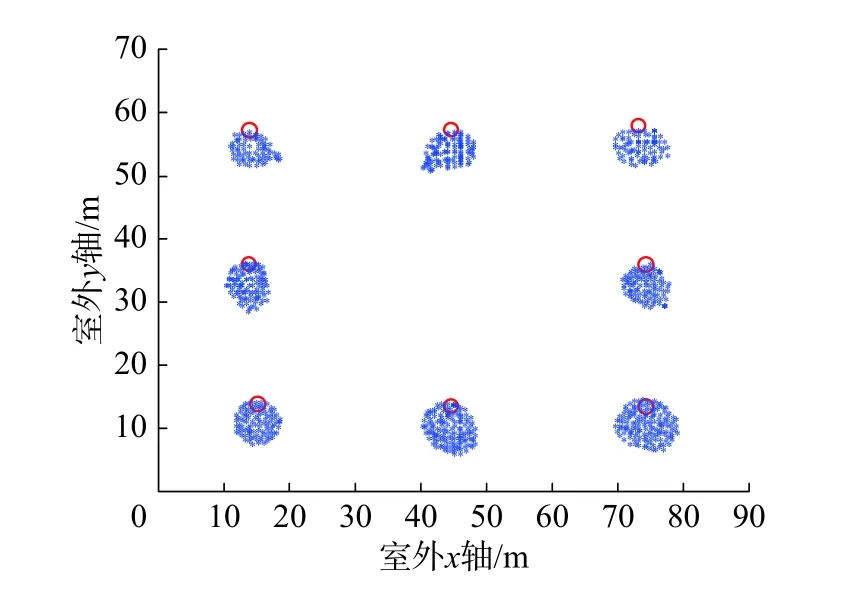
圖 6 UAV-WSN-MLE定位結果Fig. 6 UAV-WSN-MLE positioning results
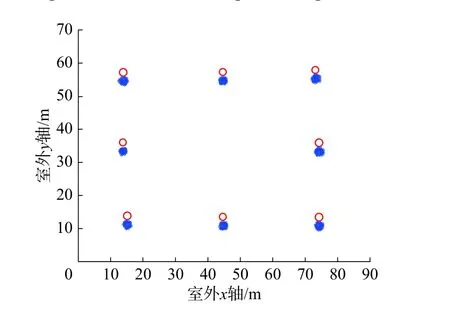
圖 7 UAV-WSN-MLE-SRCKF定位結果Fig. 7 UAV-WSN-MLE-SRCKF positioning results
3.3 算法的對比分析
通過對定位均方誤差進行分析,對以上3種方法在相同的仿真條件下進行了定位均方誤差的對比。
圖8仿真了3種算法以無人機作為移動信標節點,其中測距誤差為S=0.15的情況下獲得的8個未知節點定位誤差的55次蒙特卡羅實驗的對比圖,其中 為MLE(單純的極大似然估計)的定位均方誤差, 為MLE-CKF(極大似然估計初定位下的容積卡爾曼)定位均方誤差, 為MLE-SRCKF(極大似然初定位下的平方根容積卡爾曼)定位均方誤差。從圖8中可以看出來MLESRCKF的定位均方誤差均要小于MLE-CKF和MLE,其中MLE-CKF的定位均方誤差要小于MLE。

圖 8 3種方法的誤差對比Fig. 8 The error comparison of the three methods
4 結束語
本文提出了一種無人機協助下對未知傳感器節點的定位方法,充分地利用了無人機在三維空間靈活的機動性和強大的計算能力,為三維復雜地形下實現無線傳感器網絡節點定位提供了很大可能。另一方面,采用閾值選擇的更新策略,進一步減小了非線性因素的影響。仿真實驗表明所采用的UAV-WSN-MLE-SRCKF算法有效地解決了無線傳感器網絡節點在三維地形的定位問題,大量減少了裝載GPS模塊所帶來的成本,所用到的平方根容積卡爾曼濾波算法不但增強了數值的魯棒性,確保了狀態協方差矩陣的正定性,減小了系統濾波發散導致的誤差,也同時提高了定位的精度。
本文目前只是在仿真上驗證了該算法在三維地形中實現無線傳感器網絡節點定位的合理性與可行性。在實際應用中,驗證本文所述算法,是接下來的重點工作,正在深入研究中。