基于二維DFT變換的調頻引信信號處理方法
2019-05-15 06:55:22李楚寶袁久興任俊峰李新文
探測與控制學報 2019年2期
李楚寶,黃 輝,袁久興,任俊峰,李新文
(西安機電信息技術研究所,陜西 西安 710065)
0 引言
近些年來隨著武器裝備的發展,針對于無線電調頻引信高精度分檔定高以及抗干擾方面的需求也日見突出,通過對差頻信號中相對運動目標進行距離-速度聯合估計的信號處理方法,能有效實現高精度分檔定高以及抗干擾處理。抗干擾處理包含了在干擾條件下不誤動作及在干擾條件下能夠進行定高兩方面內容,通過距離變化-速度比對能夠在大部分干擾條件下實現干擾信號的識別,當有效獲得距離-速度信息時可以通過估計的方法在干擾時進行高度估計實現干擾條件下的定高,關于抗干擾處理方面內容的本文不做詳細論述。
傳統無線電調頻引信的信號處理方法多采用一個或兩個固定的距離通道上的多普勒信息進行定距處理,該方法不能進行距離-速度聯合估計[1-2]。文獻[3]介紹了利用鎖相環技術實現高精度大范圍測距的方法,但該方法不能提取差頻信號中的多普勒信息,不能實現距離-速度聯合估計。文獻[4]介紹了利用不同時間段差頻和多普勒信號進行混頻抑制調頻引信多普勒信號的方法,該方法不能實現距離-速度聯合估計。文獻[5]介紹了利用采用分數階傅里葉變換實現小調制帶寬高精度測距的方法,該方法同樣不能實現距離-速度聯合估計。上述文獻中介紹的調頻引信信號處理方法均不能解決無線電調頻引信差頻信號中運動目標距離、速度信息連續同時測量的問題。本文針對無線電調頻引信信號處理難以解決連續同時獲取目標距離、速度信息的問題,提出了基于二維DFT變換的調頻引信處理方法。
1 無線電調頻引信及二維DFT變換
1.1 無線電調頻引信
無線電調頻引信由于結構簡單、距離截止能力強易于實現,廣泛用于無線電引信系統,其原理框圖如圖1所示。
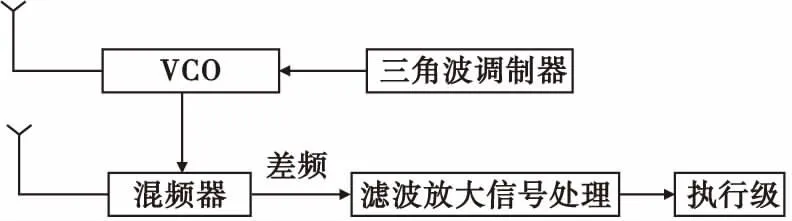
圖1 三角波調頻多普勒引信原理框圖Fig.1 Principle block diagram of triangular wave FM doppler fuze
根據圖1的原理框圖可以得到三角波調頻差頻的瞬時相位[6-8]關系為式(1),圖2為差頻信號瞬時頻率示意圖。
(1)
式(1)中,ω0為載頻,α=2πΔfm/Tm為調制斜率,Δfm為調制頻偏,Tm為調制周期,Ed為差頻信號幅度(同目標距離、目標的后向散射系數,接收增益有關),τ=2r/c為目標到引信探測器之間的延遲時間,r為目標到引信探測器之間距離,c為光速。
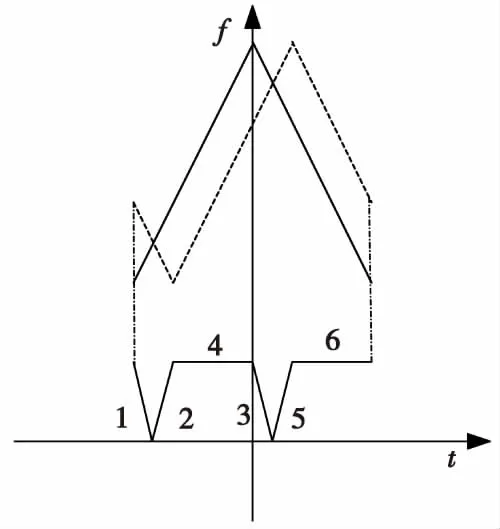
圖2 三角波調頻差頻時-頻關系Fig.2 Time-frequency relation of triangular wave FM difference frequency
1.2 二維DFT變換
二維DFT是對二維矩陣進行離散傅里葉變換,設f(x,y)是在空間域上等間隔采樣得到的M×N的二維離散信號,x和y是離散實變量,u和v為離散頻率變量,則二維DFT變換對一般地定義為:
u=0,1…,M-1;v=0,1…,N-1
(2)
2 無線電調頻引信二維DFT變換原理及步驟
三角波調頻差頻信號中存在著運動目標的距離信息及運動信息(多普勒信息),為了方便描述我們引入快時間、慢時間的概念,并對式(1)進行快、慢時間的變換和推導得出在不同時間尺度描述條件下差頻瞬時頻率的特性。快時間對應的是一個調制周期內的時間,表征的是調制周期內的距離信息。慢時間為不同調制周期對應的時間,表征的是運動信息(多普勒信息),根據式(1)增加快、慢時間參數可得到式(3):
(3)
圖2中1,2,4,5部分頻率在快時間內是變化的,稱為不規則區,通常情況下不規則區的時間很短一般進行忽略,分別對3,6部分相位求導可以得到差頻在快時間-慢時間描述下的瞬時頻率。
差頻的瞬時頻率:
(4)
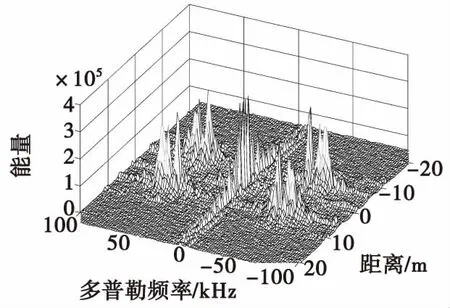
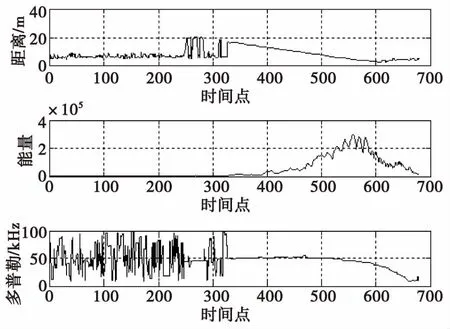
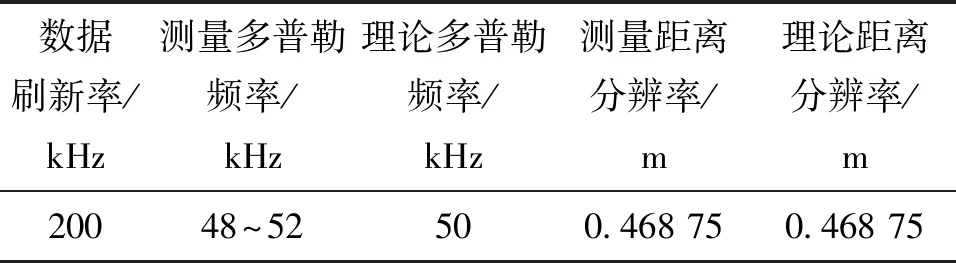
式(4)中,λ為中心頻率對應的波長,V為目標的運動速度,4Δfmr(tn,Tn)/c為差頻中距離頻率,2V/λ為差頻中的多普勒相位,φ1(tn,Tn)=V(αTm/2+2αtn-2ατ)/πc為剩余相位,φ2(tn,Tn)=V(2αtn-2ατ-αTm/2)/πc為剩余相位,且|φ1(tn,Tn)| 對差頻信號進行二維DFT變換的基本原理就是利用差頻信號包含的目標距離速度信息通過二次DFT變換分別對距離維和速度維的進行提取,該過程等同于對差頻信號一維信號空間域變換成二維信號后進行二維離散DFT變換。 設差頻一維信號為[Ud(t1,T1),…,Ud(tM,T1),…,Ud(t1,TN),…,Ud(tM,TN),…],其中,M為離散采樣數據,N為調制周期。 差頻信號的二維DFT變換具體步驟如下: 1)將一維差頻信號M×N長度的數據變成二維離散矩陣: 2)對二維離散矩陣采用式(2)進行二維DFT變換得到一個二維復信號矩陣: 3)對Y的元素求模,|y(ui,vj)|為距離vj、多普勒頻率ui對應的能量: 4)重復對一維差頻信號進行步驟1),2),3),可以得到不同時刻,不同距離對應的多普勒信號的能量。 為了驗證基于二維DFT變換的調頻引信信號處理方法能夠利用調頻引信差頻信號進行動目標距離-速度聯合估計,利用K波段調頻探測器進行運動目標的目標特性測試,通過數據記錄儀進行數據采集,使用Matlab軟件對數據記錄儀采集的數據進行仿真驗證。 K波段(12 mm)調頻探測器調制參數:三角波調頻、調制頻率fm=200 kHz、調制帶寬Δfm=160 MHz。運動目標為直角邊長0.2 m的角反射體,運動速度為1 m/s。數據記錄儀采樣率為20 Mb/s。 為模擬高速條件下算法性能,采用數據分裂合并的辦法將運動速度等效提高300倍,模擬速度V=300 m/s條件下差頻信號,然后把加速后的差頻信號轉變成二維矩陣M×N的數據(列向量長度M=100,行向量長度N=100),對二維矩陣進行二維DFT變換仿真得到運動目標對應的距離-速度-能量關系,如圖3所示。其中,X軸為距離信息,Y軸為多普勒信息(速度),Z軸能量信息,通過獲取有效速度范圍內的最大能量對應的距離、速度信息夠獲取進行運動目標距離-速度聯合估計。當對二維矩陣進行數據刷新后,可以得到連續的進行運動目標的距離-速度聯合估計,如圖4所示。 圖3 某時刻二維DFT變換的距離-速度-能量圖Fig.3 Distance-velocity-energy diagram of two-dimensional DFT transform at a time 圖4 動目標距離-速度聯合估計Fig.4 Joint range-velocity estimation of moving target 仿真結果分析見表1所示,數據刷新率同調制頻率fm相同為200 kHz,多普勒頻率理論值為50 kHz,多普勒測量精度pf=fm/N為2 kHz,測量多普勒范圍在精度范圍以內,理論測距分辨率pr=c/4Δfm為0.468 75 m,實際測距分辨率和位長有關,此次仿真驗證采用離線處理,故測量測距分辨率同理論測量分辨率。 表1 仿真結果分析表Tab.1 Analysis table of simulation results 仿真結果表明,基于二維DFT變換的調頻引信信號處理方法能夠利用無線電調頻引信系統的差頻信號進行運動目標距離-速度聯合估計。 本文提出了基于二維DFT變換的調頻引信信號處理方法。該方法把無線電調頻引信的一維差頻信號變換為二維矩陣,然后對二維矩陣數據進行二維DFT變換,通過二維DFT變換后的二維頻域信息聯合估計差頻信號中的距離、速度信息。仿真試驗表明,該方法能夠利用無線電調頻引信差頻信號進行運動目標距離-速度聯合估計,為無線電調頻引信實現高精度分檔裝定,干擾信號識別提供了一種技術途徑。3 仿真驗證
4 結論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32