基于微分平坦的平行泊車路徑規劃
2019-05-10 12:14:10葉茂季鑫趙葉鑫
汽車實用技術 2019年8期
葉茂,季鑫,趙葉鑫
?
基于微分平坦的平行泊車路徑規劃
葉茂,季鑫,趙葉鑫
(長安大學汽車學院,陜西 西安 710064)
為提高泊車成功率,降低泊車路徑規劃耗時,提出基于微分平坦理論的平行泊車路徑規劃方法。泊車路徑滿足三類約束:為保證行駛安全,綜合考慮可能碰撞情況,建立避障約束函數;為滿足停放要求,建立了終點狀態的約束函數;為保證路徑可跟蹤,建立了方向盤角度,轉角速度和車速的約束函數。利用Matlab非線性約束優化函數求得路徑參數。仿真結果表明:該方法魯棒性強,對車輛初始位置和方位角要求不高,解決了必須從特定位姿開始泊車的問題,增加靈活性和成功率;對于一般泊車環境該方法能得到曲率和車速緩慢變化的軌跡,有效解決了中途停車轉向的問題;規劃的軌跡滿足避撞約束、車輛自身的約束、泊車停放要求、方向盤轉角和轉角速度約束;基于微分平坦的路徑規劃方法,降低了計算復雜度,縮短了規劃時間,提高了泊車成功率。
平行泊車;路徑規劃;微分平坦;魯棒性
前言
汽車數量急劇增加使城市泊車難題日益突出,密歇根大學的Paul Green 的調查研究就已經表明:泊車所導致的事故占各類交通事故的比重已高達44%[1]。居高不下的泊車事故促使汽車廠商和科研人員對自動泊車技術的研究與開發。早期對泊車的研究主要是通過超聲波或者倒車影像技術對倒車安全距離做出提示,只能起到輔助泊車的作用。目前自動泊車外部環境自動建模技術已經成熟,國內外研究重點集中在自動泊車的路徑規劃。日本的Kang-ZhiLiu等人采用兩段圓弧相切式泊車軌跡提出了一種較為完善的安全邊界約束規則,但存在泊車路徑的曲率不連續的不足[2]。Chang[3]等人基于模糊邏輯控制進行泊車系統研究,結合了優秀駕駛員的操作習慣但需要大量的泊車實驗。文獻[4]中采用B樣條曲線設計垂向泊車路徑,雖然避免了泊車過程中原地轉向現象,但未考慮方向盤轉速對跟蹤效果的影響。文獻[5]中采用微分平坦軌跡泊車路徑,但對泊車起點和終點位置和姿態要求過高。此外文獻[6]提出一種五段多項式拼接泊車軌跡使得曲率連續,但計算過程過于復雜。
由此可知目前自動泊車技術尚未完全成熟,特別是在實際應用中還有諸多問題,為此本文在已有的研究上提出一種改進的微分平坦路徑規劃方法。
1 自動泊車工作流程
自動泊車系統工作流程描述如下:(圖1)(1)駕駛員開啟自動泊車系統;(2)車輛低速行駛搜尋泊車位;(3)找到大小合適的泊車位后確定相對位置并到達。泊車起點;(4)根據環境模型規劃泊車軌跡;(5)找到合適軌跡后車輛低速跟隨軌跡開始泊車;(6)到達停車點后泊車結束。

圖1 自動泊車系統工作流程
Fig 1 Flow chart of automatic parking system
泊車位分為平行泊車位,垂直泊車位,傾斜泊車位三種。車輛行進方式分為前進和倒車兩種。本文僅研究其中最難的倒車進入平行泊車位這一狀況。
2 泊車路徑規劃
本文研究的泊車軌跡為了貼合實際情況需要滿足一下限制:
(1)滿足車輛本身的限制,包括最大前輪轉角,最大轉角加速度,最大車速加速度等。(2)車輛沿軌跡行駛不會發生碰撞;
(3)最終時刻車輛在泊車位范圍內;
(4)車輛運動連貫,無原地轉向或速度突變。
2.1 微分平坦
2.1.1微分平坦的定義
微平坦的定義如下:對于一個非線性系統:

如果能夠找到如下形式的輸出量:

使得該系統的輸入量u和狀態量x都能用輸出量z和z的有限階導數表示如下:

則稱系統(2.1)是微分平坦系統,其中被稱為平坦輸出(Flatness outputs)。但是到目前為止還沒有找到易用的判定微分平坦系統的充分必要條件文獻[7]給出了必要條件,文獻[8]給出了一種復雜的求解平坦輸出的算法。因此在實際應用中往往依據物理意義選擇一組輸出,然后驗證這組輸出是否符合公式(3)。
由上文推導,在此不加證明地給出平坦系統最重要的性質:平坦輸出量與系統狀態量和輸入量存在對應關系,即只用就可以唯一確定系統的運動軌跡。
2.1.2車輛運動學模型的平坦輸出
汽車是受非完整約束的非線性系統,本文忽視汽車的動力學特性只考慮運動學特性。考慮到車體不能側向滑動,后軸中心的運動方向與車體方向一致。得出車輛運動必須滿足如下約束[9]:

分別表示車輛前輪和后輪無側向滑動,其中(f,f)表示前軸中心坐標,(,)表示后軸中心坐標,表示車體位姿角,表示前輪轉角。
根據實際駕車操作,通常以車速和前輪轉向角速度f作為車輛模型的輸入。以,,,作為模型的狀態量。有如下運動學模型表達式:
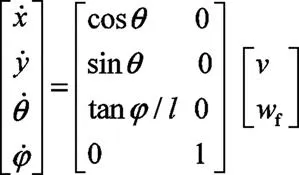
其中表示軸距。結合Ackerman轉角幾何關系可以得到如下關系:

式中表示后軸中心點速度;表示瞬時軌跡曲率;表示瞬時轉彎半徑。
本文直接選取平坦輸出為z=[,]T。下面我們來是否滿足公式(3):

推導可得



由(2.8)~(2.10)可得:

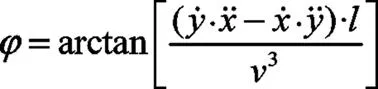

由(7)到(13)可知z=[,]T是汽車運動學模型(5)的平坦輸出。既可以用后軸中心點的軌跡推算整個運動過程中車輛的輸入量和狀態變化。
2.2 建立泊車軌跡方程
基于前文對車輛模型設計的平坦輸出,本小節結合車輛和環境的約束建立泊車軌跡方程。
2.2.1車輛約束
由車輛模型(6)可知系統輸入是速度和轉向兩個維度,因此車輛約束也分成兩部分:

體現了對速度和加速度的約束。

體現了對前輪轉角和轉速的約束。
2.2.2避障約束
泊車過程示意如下圖:

圖2 平行泊車示意圖
Fig 2 Diagram of parallel parking
需要滿足避障約束表述如下:
(1)車身不超出當前車道,既a<;

(3)車位三側避撞:

(4)泊車結束時車身不超出車位,既當

3 仿真實例及分析
3.1 仿真實例設計
分別選擇四次多項式對平坦輸出()和()。進行參數化,既:

優化指標用能量與時間定義:

選取泊車相關參數如下:
停車位參數:C=7.0;K=2.4;=5;車輛參數:=2.4;f=0.8;r=0.95;K=1.64。
車輛約束參數:max=2;max=42;max=0.52;max=0.50。
車輛起點參數:0=8.1;0=1.3;0=-0.1利用Matlab中的Fmincon函數對(16)尋優并得到如下仿真圖:

圖3 平行泊車路徑
Fig 3 Path of parallel parking
3.2 仿真結果分析
(1)由圖3可知車輛從泊車起點到終點與周圍物品無碰撞,不超出當前車道,且停車時車身不超出停車位既滿足停車要求。
(2)由圖4(a)可知車輛初始狀態方位角為-0.1,既與車位不平行,終點時方位角接近0.證明該方法魯棒性高,對泊車起始姿態要求不高。
(3)由圖4(b)~圖4(d)可知車輛的方向盤轉角和車速均連續緩慢變化,解決了泊車中途停車轉向的問題。

圖4 平行泊車仿真結果
Fig 4 Simulation results of parallel parking
4 結語
本文針對現有平行泊車路徑規劃的不足,采用微分平坦理論進行路徑規劃設計。首先介紹該理論原理并分析了其計算復雜度較小的優勢。其次在綜合考慮了車輛避障要求,停放約束以及對車輛自身動力學和運動學的約束后構建路徑約束函數。最后選擇較為苛刻的條件下,既起始點與車位不平行時規劃泊車路徑。從仿真效果圖中可知基于微分平坦系統的路徑規劃方法所得路徑不但曲率連續不需中途停車、滿足車輛約束而且魯棒性高,對泊車初始姿態不敏感。
[1] Paul Green. Parking Crashes and Parking Assistance System Design: Evidence fromCrash Databases, the Literature and Insurance Agent Interviews[C]. SAE World Congress, 2006.
[2] Liu Kangzhi, Dao Mingquan, Takuya Inoue. Theory and Experiments on Automatic Parking Systems[C].2004 8th International Conferen -ce on Control Automation, Robotics and Vision Kunming, China 6- 9th December 2004.
[3] Changsj, Lithsl.Design and Implementation of fuzzy parallel-parking control for a car-type mobile robot [J].Journal of Intelligent and Robotic Systems,2004,34(2): 175-194.
[4] 李紅,郭孔輝,宋曉琳.基于樣條理論的自動垂直泊車軌跡規劃[J]. 湖南大學學報(自然科學版), 2012, 39(07): 25-30.
[5] 宋金澤.自主泊車系統關鍵技術研究[D].長沙:國防科技大學, 2009.
[6] 胡偉龍.多段式平行泊車軌跡動態規劃及系統控制[D].合肥:合肥工業大學, 2016.
[7] M.Filess,J.L evine, P.Martion,P.Rouchon. A Lie-backlund Approach to Equivalence and Flatness of Nonlinear Systems[J]. IEEE Transac -tions on Automatic Control.1999.44(5):922-937.
[8] R.M.Murray,M.Rathiam, W.Sluis. Differential Flatness of Mechani -cal [C].International Congress and Exposition, San Francisco,CA, 1995.
[9] 單恩忠.基于微分平坦與樣條理論的自主泊車軌跡規劃研究[D].長沙:國防科學技術大學,2009.
[10] 李紅.自動泊車系統路徑規劃與跟蹤控制研究[D].長沙:湖南大學, 2014.
Parallel Parking Trajectory Planning Based on Differential Flatness
Ye Mao, Ji Xin, Zhao Yexin
(School of Automobile, Chang’an University, Shaanxi Xi’an 710064)
In order to improve the parking success rate and reduce the time-consuming of planning of parking path, a parallel parking path planning method based on differential flat theory was proposed.The parking path satisfies three types of constraints: in order to ensure driving safety, possible collision situations was considered. then obstacle avoidance constraint function was established; in order to meet the parking requirements, a constraint function of the end state was established; to ensure that the path can be tracked, the constraint function of steering wheel angle and speed was established.. The path parameters was obtained by using the matlab nonlinear constrained optimization function. The simulation results show that the method is robust and has low requirements on the initial position and azimuth of the vehicle. It solves the problem that parking must start from a specific pose, increasing flexibility and success rate. For the general parking environment, a trajectory with small curvature and slow change of vehicle speed can be obtained, which effectively solves the problem of midway stop with steering; the planned trajectory satisfies collision avoidance constraint, vehicle's own constraints, parking parking requirements, steering wheel angle and corner speed constraint; The path planning method based on differential flatness can reduce computational complexity, shorten planning time, and improve parking success rate.
parallel parking;path planning;differential flatness;robustness
U467
A
1671-7988(2019)08-51-04
U467
A
1671-7988(2019)08-51-04
葉茂 (1994-),男,碩士研究生,就讀于長安大學。
10.16638/j.cnki.1671-7988.2019.08.016
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
公民與法治(2020年11期)2020-07-25 02:02:06
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
