抖動法篩選特征點仿真
2019-05-07 11:44:58李日亮
傳感器與微系統 2019年5期
李日亮, 徐 曉
(華南理工大學 物理與光電學院,廣東 廣州 510640)
0 引 言
在機器視覺領域中,雙目三維重建方法多數采用提取圖像特征點進行特征匹配[1,2],通過匹配點來計算出其對應的空間三維坐標[3,4],而特征匹配的方法涉及到的都是二維圖像。由于雙目視差[5,6]的存在,雙目圖像并不相同,只是相似,對應點鄰域的圖像是有差異的。這種差異引起對應點匹配不準,或者找錯匹配點而產生誤匹配,從而使計算出的三維坐標不準確或者計算出不存在的點[7,8]。大量的實驗和理論表明,只要從不同的方位采集圖像,在三維物體光照情況固定,并且光照條件足夠體現出物體形貌信息的情況下,是可以避免上面的誤匹配問題的[9~12]。
但在真實工況下,被攝物體保持穩定姿態和光照穩定的時間都是有限的;同時考慮到成本,也不會用多相機和硬件復雜的數據處理系統。項目組要設計一個雙目三維重建系統,相機由平移臺控制,可相對物體運動,并要求在盡量短的時間內,使相機相對物體移動盡量短的距離和少的次數采集新圖像,并補充更多的新的目標物三維信息。考慮到相機移動以尋求不同拍攝角度時[12,13],兩相機間相對關系若不固定,也會為結果計算和系統標定帶來復雜性,并會降低檢測復原的精度[14~16],所以,相機移動是沿精確的已知軌道。在一定精度條件下,是工程可實現的。命名該方法為抖動法[17],仿真實驗驗證了本文算法的有效性。
1 抖動法三維復原系統與仿真典型條件
抖動法三維復原系統示意圖如圖1。系統有2個相機,通過移動平臺控制使兩相機位置發生變動[18]。
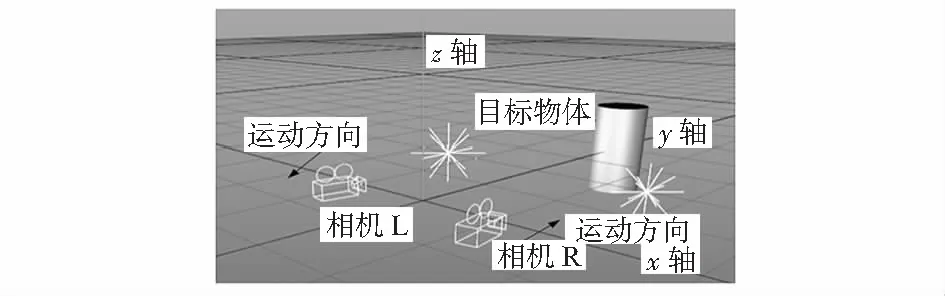
圖1 抖動法三維復原系統
為驗證抖動法,仿真僅移動相機1~2次。通過仿真發現,如果相機沿基線運動,不能獲得太多的驗證信息。而項目組分析發現,極幾何條件要求特征點匹配時,左右圖像β要一樣,移動方向要顯著改變雙目成像極幾何條件中的β取法,才能對最先的三維復原點有明顯的檢驗效果。
為了運動的典型性和坐標易算性,作為典型條件,讓兩相機分別沿著垂直L1R1方向移動。同時,鑒于旋轉并不能改變明顯改變β取法,也不引入相機旋轉。
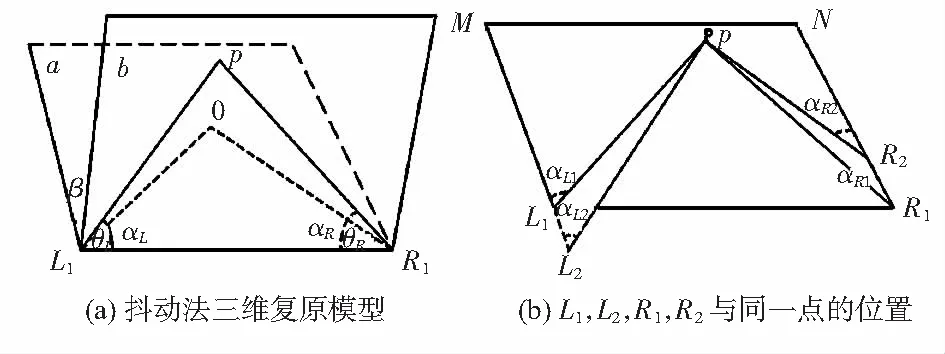
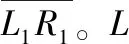
圖2 算法仿真模型
2 抖動算法仿真
2.1 左相機兩圖片的匹配和右相機圖片匹配

類似左相機,右相機有R1-R2系統。其中,∠PR1R2為αR1,∠PR2N為αR2(αR1>0,αR2>0),R1R2垂直于L1R1。R1,R2處相機圖像的匹配與左相機處理方式相同。
2.2 三個直角坐標系統
為計算直角坐標,抖動法三維重建模型有3個直角坐標系統。圖3(a)為這三個直角坐標系統。L1-R1系統中,以L1為原點,L1R1為x軸,L1M為y軸。L1-L2系統中,以L2相機光心為原點,L2L1為x軸,L2Q為y軸。R1-R2系統中,以R1相機的光心為原點,R1R2方向為x軸,R1L1方向為y軸。三個坐標系統都以垂直于基準極平面向上為z軸。
圖3 坐標轉換
設空間一點P在L1-R1系統的坐標為(xp,yp,zp),在L1-L2系統的坐標為(xL,yL,zL),在R1-R2系統的坐標為(xR,yR,zR);轉換關系如下
(1)
如圖3(b),在L1-L2系統中,面PML2與面HML2的夾角為,∠PL1M=αL1,∠PL2M=αL2;P點坐標是(xL,yL,zL);世界坐標轉換成角度坐標如下
(2)
式中αL1,αL2的范圍為(0°,180°)。
2.3 抖動算法的流程
本文的實驗步驟如下:
1)圖像L1,R1坐標轉換,匹配,計算匹配特征點對的三維歐氏坐標(xp,yp,zp)[19];
2)將三維復原的空間域坐標轉換成L1-L2系統的角度坐標,用圖像L1,L2的角度坐標匹配點檢查L1,R1轉換而來的角度坐標是否存在誤匹配點,如果有,則淘汰;
3)將剩余點復原到L1-R1系統空間域,再把空間域坐標轉換成R1-R2系統的角度坐標;
4)用圖像R1,R2的角度坐標匹配點檢查圖像L1,R1轉換而來的角度坐標是否存在誤匹配點,如果有,則淘汰;
5)用剩余點進行三維重建。
2.4 誤匹配點淘汰過程
由圖像L1,R1三維復原特征點的歐氏坐標(xp,yp,zp),先轉成L1-L2系統的歐氏坐標(xL,yL,zL),再通過式(2),轉換成了L1-L2系統的角度坐標,記為(αL1P,αL2P,βLP)。L1,L2圖像直接匹配,得到匹配點的角度坐標為(αL1,αL2,βL);以{(αL1,αL2,βL)}特征點集合為標準,來檢查{(αL1P,αL2P,βLP)}集合中是否有誤匹配點。
如圖4所示,表明了取某個βL時,且βLP≈βL時,兩類特征點的相互關系。其中,點表示集合{(αL1,αL2,βL)}中的點,圓圈表示{(αL1P,αL2P,βLP)}集合中的點。
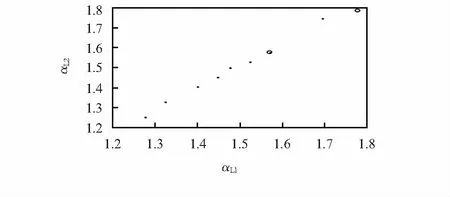
圖4 兩集合內點的關系
觀察圖4,{(αL1P,αL2P,βLP)}集合中的點,可以分為三類:a.離{(αL1,αL2,βL)}中某個點較近;b.離{(αL1,αL2,βL)}所有點較遠,但其橫坐標離某個點近;c.橫縱坐標都遠離{(αL1,αL2,βL)}的點。
a類點的劃分標準,是其距{(αL1,αL2,βL)}離中最近點的距離小于事先給定的閾值,這類點會被保留;b類點的劃分標準,是其橫坐標與{(αL1,αL2,βL)}中的某個點橫坐標的差的絕對值小于某個給定閾值,但其縱坐標與對應點的縱坐標的差距大于某個閾值,這類點會被拋棄;c類點就是除a,b類以外的點,其如何取舍,取決于這個點在L1和L2圖上對應位置的灰度值和灰度值沿αL方向一階導相互之間的差距,如果差距大于某個值,則此點被拋棄,否則,被保留。
2.5 三維復原
圖像L1,R1經淘汰后留下來的點,可用作三維復原。
3 實驗與探討
3.1 實驗一

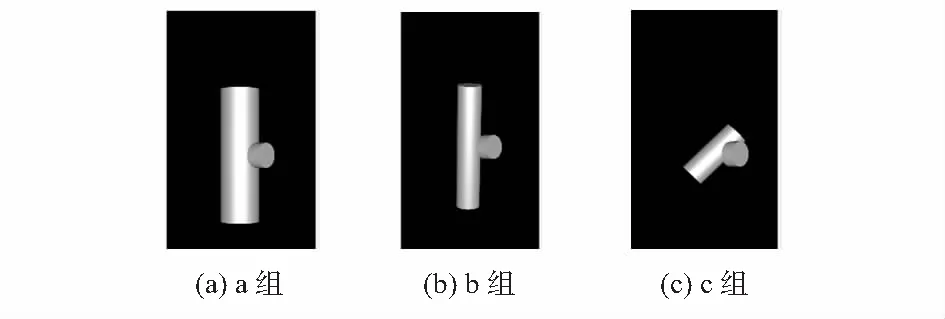
圖5 實驗組合圓柱
淘汰條件的設置如下:
1)判斷待淘汰點αL1軸0.02°范圍內有沒有參考點,如果有,繼續判斷待淘汰點αL2軸0.02°范圍內有沒有參考點,如果有,則保留該點;
2)判斷待淘汰點的αL1軸0.01°范圍內有沒有參考點,如果有,繼續判斷該參考點沿αL2軸方向與該待淘汰點差值絕對值是不是大于0.02°,如果是,則淘汰該點;
3)判斷待淘汰點的αL1軸0.02°范圍內有沒有參考點,如果沒有,判斷待淘汰點的αL2軸0.02°范圍內有沒有參考點,如果沒有,則繼續判斷該點在L1和L2圖上的灰度值差值絕對值是否小于30,灰度值一階導差值絕對值是否小于10。如果同時滿足兩個條件則留下該點。如圖4所示。
把組合圓柱體還原在L1-R1系統歐氏坐標中,將三維重建結果以“*”的形式打到同一張圖上。將組合圓柱體和淘汰后三維復原結果畫在另一張圖上,如圖6所示。同一行β,匹配錯誤一個點導致的深度方向誤差[6]為3.4 mm。取圓柱面附近一個像素點距離內為正確匹配點,由于本次實驗2個圓柱距離很近,故而取圓柱頂面和底面高度各加減3 mm內:離圓心距離在(r(半徑)+3)mm以內為正確匹配點;圓柱底面高度加3 mm到頂面高度減3 mm范圍內:距離圓柱圓心的距離在[r-3:r+2.25]mm范圍內為正確匹配點。統計數據如表1所示。

表1 a,b,c組圓柱過濾前后正確匹配點
a組圓柱嚴格匹配三維重建結果如圖6。
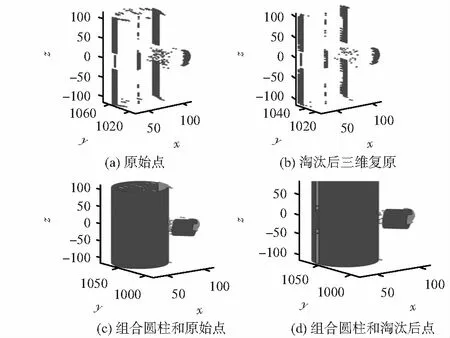
圖6 a組圓柱三維重建結果
將淘汰前正確率設為x,淘汰后正確率設為y,它們之間關系如圖7(a)所示,小方塊表示a組圓柱數據,*號表示b組圓柱數據,小圓圈表示c組圓柱數據。正確率提高量(y-x)/x×100 %與x的關系如圖7(b)所示。
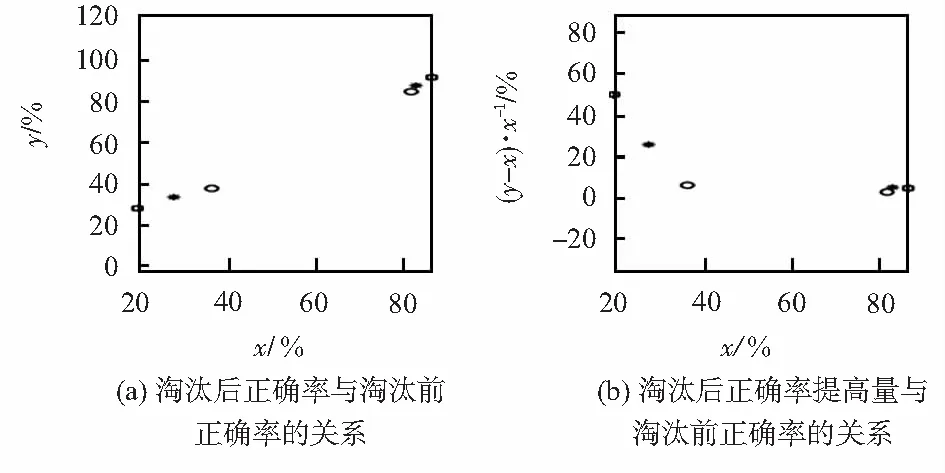
圖7 正確率統計
3.2 實驗二
實驗二的目的,將一個對讀者有印象的形狀較復雜的對象作為目標物,來直觀上檢查方法的有效性。本實驗采用3D仿真軟件Cinema 4D模擬相機拍攝藝術家頭像雕塑,放置L1,L2,R1,R2共4個相機在4個不同的位置模擬拍照,得到4張1 628×1 236的圖像。L1(到L2),R1(到R2)的移動距離為20 mm。其他實驗參數設置與實驗一相同[19]。
圖像L1,R1三維重建結果如圖8(c)所示。淘汰條件設置與實驗一相同。
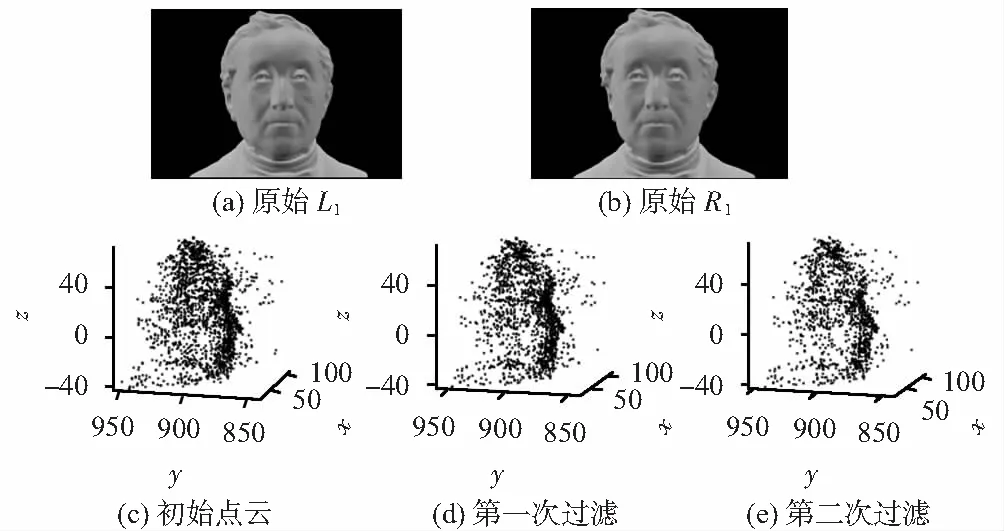
圖8 原始圖像與過濾前后的三維重建結果
由圖8可以看出,淘汰后人側臉有明顯改善。
4 結 論
實驗一表明:三維重建點云經過淘汰后正確點的比例會提高,證明了實驗方法顯著淘汰錯誤點同時又保留足夠多的正確點。而且,原始匹配的誤匹配率越高,經過抖動過濾的改善情況越明顯。實驗二直觀地表明,在明顯改變β取值方向的情況下,左右相機抖動前后的匹配結果能夠減小傳統三維重建的不確定度,改善三維重建的結果。
仿真實驗驗證了抖動算法篩選特征點的有效性。改善率和正確率的函變關系的確定,為未來抖動法三維重建的運動步長以及運動次數提供參照,為抖動法的工程設計和實現,打下了基礎。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
