基于運(yùn)動(dòng)模型的低空非合作無人機(jī)目標(biāo)識(shí)別
2019-05-05 02:01:36陳唯實(shí)劉佳陳小龍李敬
北京航空航天大學(xué)學(xué)報(bào) 2019年4期
陳唯實(shí), 劉佳, 陳小龍, 李敬
(1. 中國民航科學(xué)技術(shù)研究院, 北京 100028; 2. 北京航空航天大學(xué)交通科學(xué)與工程學(xué)院, 北京 100083; 3. 海軍航空大學(xué), 煙臺(tái) 264001)
隨著無人機(jī)(UAV)產(chǎn)業(yè)的迅猛發(fā)展,近年來,中國多個(gè)機(jī)場接連出現(xiàn)無人機(jī)擾航事件[1]。非法放飛無人機(jī)所帶來的安全隱患給機(jī)場、邊境、重要敏感區(qū)域的低空保護(hù)敲響了警鐘,引發(fā)公眾高度關(guān)注。根據(jù)目標(biāo)與探測設(shè)備之間是否通信進(jìn)行分類,以無人機(jī)為代表的“低慢小”目標(biāo)通常可分為合作和非合作兩類。針對合作無人機(jī),其飛行信息可實(shí)時(shí)接入無人機(jī)云管理系統(tǒng),監(jiān)管部門將對誤入相應(yīng)區(qū)域的無人機(jī)進(jìn)行查詢和記錄[2]。合作式監(jiān)管技術(shù)目前已能覆蓋95%以上的消費(fèi)級(jí)無人機(jī),而剩余不足5%的非合作無人機(jī)是低空防范的重點(diǎn)和難點(diǎn)。
目前,典型的非合作無人機(jī)目標(biāo)探測技術(shù)包括光電、無線電偵測、聲學(xué)、雷達(dá)等,每種技術(shù)手段各具優(yōu)勢和短板[3-9]。其中,無線電偵測技術(shù)可有效偵測到無人機(jī)操作者,對于不發(fā)射無線電信號(hào)的“靜默”無人機(jī),不能有效發(fā)現(xiàn);光電探測雖在目標(biāo)識(shí)別方面存在優(yōu)勢,但易受環(huán)境光線干擾,且探測距離有限;音頻探測技術(shù)易受噪聲、雜波的影響,對于大型無人機(jī)效果較好,但在背景噪聲較強(qiáng)的環(huán)境中難以探測到中小型無人機(jī)。總的來說,雷達(dá)作為目標(biāo)探測和監(jiān)視的主要手段,在空中和海面目標(biāo)監(jiān)視預(yù)警等國防和公共安全領(lǐng)域應(yīng)用廣泛,雖然傳統(tǒng)雷達(dá)對于“低慢小”目標(biāo)存在探測效能不足的問題,但雷達(dá)仍是對空目標(biāo)探測的重要手段[10]。
在低空環(huán)境中,飛鳥是除無人機(jī)目標(biāo)外主要的“低慢小”目標(biāo),在無人機(jī)目標(biāo)探測過程中,需要對無人機(jī)和飛鳥目標(biāo)進(jìn)行分類識(shí)別,進(jìn)而將飛鳥目標(biāo)作為雜波剔除。一般情況下,雷達(dá)作為單一探測手段,僅能獲取目標(biāo)的幅度、位置、速度等信息,難以對目標(biāo)進(jìn)行有效分類和識(shí)別。目前,典型的無人機(jī)探測系統(tǒng)采用光電技術(shù)作為雷達(dá)系統(tǒng)的補(bǔ)充,在雷達(dá)發(fā)現(xiàn)無人機(jī)目標(biāo)后加以識(shí)別確認(rèn)[11];但此類系統(tǒng)成本較高,且由于光電設(shè)備視場有限,加之其在探測不同距離的目標(biāo)時(shí)需要調(diào)整焦距,使雷達(dá)和光電設(shè)備在聯(lián)動(dòng)配合的同步性方面存在困難。另有大量研究者通過提取目標(biāo)的微多普勒特征識(shí)別無人機(jī)目標(biāo)[12-16],但此類研究目前還只適用于雷達(dá)回波較強(qiáng)的金屬旋翼無人機(jī),對于回波微弱的輕小型無人機(jī)(如大疆精靈系列)識(shí)別尚鮮有相關(guān)報(bào)道。
針對以上問題,本文利用常規(guī)機(jī)械掃描雷達(dá)獲取的目標(biāo)回波信息,充分分析無人機(jī)與飛鳥目標(biāo)運(yùn)動(dòng)方式的差異,提出了一種基于運(yùn)動(dòng)模型的低空非合作無人機(jī)與飛鳥目標(biāo)識(shí)別方法。該方法同時(shí)基于多種運(yùn)動(dòng)模型進(jìn)行無人機(jī)和飛鳥目標(biāo)跟蹤,并估計(jì)各種運(yùn)動(dòng)模型的出現(xiàn)概率,以各種運(yùn)動(dòng)模型在連續(xù)時(shí)間內(nèi)出現(xiàn)概率的方差均值來度量目標(biāo)運(yùn)動(dòng)模型的轉(zhuǎn)換頻率,進(jìn)而區(qū)分出飛鳥和無人機(jī)目標(biāo)。
1 模型的建立與分析
低空飛鳥目標(biāo)的散射截面、飛行速度、飛行高度等特征信息與輕小型無人機(jī)接近,現(xiàn)有的低空監(jiān)視雷達(dá)難以區(qū)分,在探測輕小型無人機(jī)時(shí)易導(dǎo)致虛警。本文提出了一種基于運(yùn)動(dòng)模型的輕小型無人機(jī)與飛鳥目標(biāo)識(shí)別方法,能夠剔除飛鳥等干擾目標(biāo),提升雷達(dá)跟蹤效果。本節(jié)首先給出方法的基本流程,進(jìn)而詳述運(yùn)動(dòng)模型的建立與特征提取方法。
1.1 方法流程設(shè)計(jì)
本文方法通過多模型目標(biāo)跟蹤、多模型概率提取、目標(biāo)運(yùn)動(dòng)模式判斷、目標(biāo)運(yùn)動(dòng)特征提取等4個(gè)步驟,最終提取出目標(biāo)運(yùn)動(dòng)模型轉(zhuǎn)換頻率等目標(biāo)特征,用以區(qū)分輕小型無人機(jī)目標(biāo)與飛鳥目標(biāo),方法流程如圖1所示。已有的目標(biāo)跟蹤方法通過建立目標(biāo)運(yùn)動(dòng)模型預(yù)估目標(biāo)的狀態(tài)信息,并利用量測信息對目標(biāo)狀態(tài)進(jìn)行修正,其目的在于提高跟蹤精度,逼近目標(biāo)的真實(shí)運(yùn)動(dòng)狀態(tài)。本文方法的目標(biāo)不在于提高跟蹤精度,而在于實(shí)現(xiàn)目標(biāo)的識(shí)別分類,是對已有目標(biāo)跟蹤方法應(yīng)用的拓展和延伸。

圖1 無人機(jī)與飛鳥目標(biāo)識(shí)別方法流程Fig.1 Flowchart of recognition method for UAV and flying bird targets
1.2 運(yùn)動(dòng)模型的建立與特征提取
1) 多模型目標(biāo)跟蹤
由于每個(gè)目標(biāo)在運(yùn)動(dòng)過程中可能具備多種運(yùn)動(dòng)模式,在某一時(shí)刻,多模型目標(biāo)跟蹤采用n種模型并行工作,通過混合上一時(shí)刻所有濾波器生成的狀態(tài)估計(jì),獲得某種模型配置濾波器的初始條件。

(1)
(2)

然后計(jì)算每個(gè)濾波器的混合輸入:
(3)
(4)

對每個(gè)模型Mi,濾波如下:
(5)
(6)

此外,還計(jì)算了每個(gè)濾波器的測量相似性:
(7)

2) 多模型概率提取

(8)
(9)
式中:c為歸一化因子。
3) 目標(biāo)運(yùn)動(dòng)模式判斷
(10)
4) 目標(biāo)運(yùn)動(dòng)特征提取
提取目標(biāo)運(yùn)動(dòng)模型轉(zhuǎn)換頻率估計(jì)值F,由下式計(jì)算:
(11)
飛鳥目標(biāo)的機(jī)動(dòng)性通常高于輕小型無人機(jī),設(shè)定閾值S,如該轉(zhuǎn)換頻率估計(jì)值高于S,則為飛鳥目標(biāo),反之,則為輕小型無人機(jī)目標(biāo)。
2 仿真數(shù)據(jù)驗(yàn)證
本節(jié)針對無人機(jī)與飛鳥目標(biāo)的仿真數(shù)據(jù),通過蒙特卡羅實(shí)驗(yàn)評(píng)價(jià)本文方法的有效性,評(píng)價(jià)方法包括不同模型的估計(jì)概率、檢測率、虛警率、工作特征(ROC)曲線等。
2.1 仿真運(yùn)動(dòng)模型
本文建立了勻速直線運(yùn)動(dòng)和機(jī)動(dòng)變速運(yùn)動(dòng)2類仿真模型,以勻速直線運(yùn)動(dòng)模型模擬無人機(jī)目標(biāo),以勻速直線運(yùn)動(dòng)模型和機(jī)動(dòng)變速運(yùn)動(dòng)模型模擬飛鳥運(yùn)動(dòng)。

(12)
目標(biāo)動(dòng)態(tài)模型表示為
(13)
式中:Δt為系統(tǒng)數(shù)據(jù)更新時(shí)間間隔;qk為高斯過程噪聲,其均值為零,協(xié)方差為
(14)
其中:q為噪聲的譜密度。

(15)
目標(biāo)動(dòng)態(tài)模型表示為
(16)
式中:qk均值為零,協(xié)方差為
(17)
本文中,2種運(yùn)動(dòng)模型的時(shí)間步長均設(shè)定為Δt=0.1,過程噪聲的功率譜密度設(shè)定為q=0.1。所有無人機(jī)和飛鳥目標(biāo)的運(yùn)動(dòng)軌跡均勻隨機(jī)地分布在空間[-100,100]×[-100,100]中,如圖2所示,包括全局示意圖及對某飛鳥目標(biāo)軌跡的局部放大示意圖。無人機(jī)和飛鳥目標(biāo)的運(yùn)動(dòng)模型參數(shù)設(shè)置如下:

圖2 無人機(jī)與飛鳥目標(biāo)軌跡仿真軌跡Fig.2 Simulated trajectories of UAV and flying bird targets
1) 無人機(jī)目標(biāo)的起點(diǎn)為[0,0],起始速度為[2,-3],經(jīng)過240步仿真。
2) 每個(gè)飛鳥目標(biāo)運(yùn)動(dòng)軌跡的起點(diǎn)在空間[-100,100]×[-100,100]中隨機(jī)分布。
3) 每個(gè)飛鳥目標(biāo)的起始速度幅值為2,運(yùn)動(dòng)起始方向在0°~360°范圍內(nèi)隨機(jī)生成。
4) 每個(gè)飛鳥目標(biāo)運(yùn)動(dòng)軌跡的仿真步數(shù)在20~60范圍內(nèi)隨機(jī)生成。
5) 飛鳥目標(biāo)的運(yùn)動(dòng)模型在勻速直線運(yùn)動(dòng)模型和機(jī)動(dòng)變速運(yùn)動(dòng)模型二者之間切換,切換的頻率由p進(jìn)行控制,即生成0~1之間的隨機(jī)數(shù),當(dāng)其小于p時(shí),就切換一次運(yùn)動(dòng)模型。
6) 無人機(jī)和飛鳥目標(biāo)均經(jīng)過1 000次蒙特卡羅仿真,即各生成1 000條仿真運(yùn)動(dòng)軌跡。
2.2 仿真結(jié)果與分析
基于無人機(jī)和飛鳥目標(biāo)運(yùn)動(dòng)軌跡的蒙特卡羅仿真數(shù)據(jù),對本文方法的無人機(jī)目標(biāo)識(shí)別效果進(jìn)行分析驗(yàn)證。
圖3和圖4分別給出了無人機(jī)和飛鳥目標(biāo)某 次跟蹤仿真中的模型概率估計(jì)結(jié)果,其中飛鳥目標(biāo)的模型切換頻率p=0.3。無人機(jī)目標(biāo)在240步跟蹤仿真中,模型1(即勻速直線運(yùn)動(dòng)模型)的估計(jì)概率約為0.8,模型2(即機(jī)動(dòng)變速運(yùn)動(dòng)模型)的估計(jì)概率約為0.2, 說明其僅采用了勻速直線運(yùn)動(dòng)模型。飛鳥目標(biāo)在56步跟蹤仿真中,在模型1和模型2之間切換6次,模型1和模型2的估計(jì)概率在0.1~0.8之間變化且起伏較大,明顯高于無人機(jī)目標(biāo),可以此為特征區(qū)分這兩類目標(biāo)。
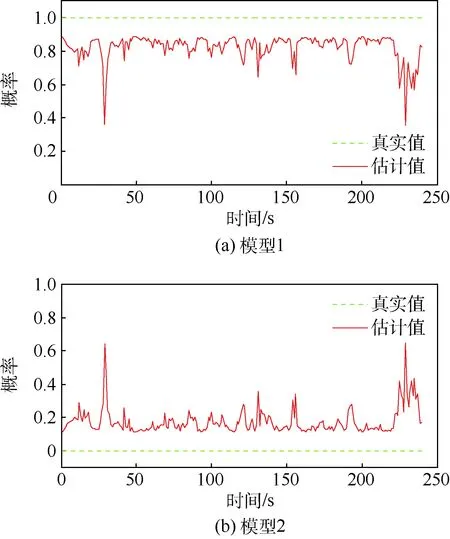
圖3 無人機(jī)目標(biāo)跟蹤中的模型估計(jì)概率Fig.3 Model estimation probability in UAV target tracking
表1給出了1 000次蒙特卡羅實(shí)驗(yàn)的無人機(jī)和飛鳥目標(biāo)的運(yùn)動(dòng)模型概率估計(jì)的方差均值F,以度量目標(biāo)運(yùn)動(dòng)模型轉(zhuǎn)換的頻繁程度。可見,無人機(jī)目標(biāo)運(yùn)動(dòng)模型概率估計(jì)的方差均值比飛鳥目標(biāo)低一個(gè)數(shù)量級(jí);隨著模型轉(zhuǎn)換頻率p值的增加(p=0.2,0.3,0.4,0.5),運(yùn)動(dòng)模型概率估計(jì)方差F的均值也逐漸增加。
圖5給出了不同p值情況下,隨閾值設(shè)置變化,基于1 000次蒙特卡羅仿真數(shù)據(jù)的ROC曲線,以無人機(jī)為目標(biāo)、飛鳥為虛警。p值越大,飛鳥目標(biāo)運(yùn)動(dòng)模型的轉(zhuǎn)化頻率越高,越容易識(shí)別。可見,p=0.5時(shí),無人機(jī)目標(biāo)的檢測率接近1.0時(shí),對飛鳥目標(biāo)的虛警率低于0.15。
需要說明的是,目標(biāo)跟蹤方法能夠通過數(shù)據(jù)關(guān)聯(lián)剔除背景噪聲,一定數(shù)量的背景噪聲對本文方法的識(shí)別性能不會(huì)造成影響。通過在仿真數(shù)據(jù)中增加背景噪聲,驗(yàn)證本文方法在噪聲環(huán)境中的目標(biāo)識(shí)別效果。圖6為加入背景噪聲的無人機(jī)與 飛鳥目標(biāo)運(yùn)動(dòng)軌跡仿真數(shù)據(jù),噪聲由“×”表示,平均每步仿真加入5個(gè)噪聲,其余參數(shù)設(shè)置與2.1節(jié)相同;可見,本文方法仍然實(shí)現(xiàn)了對無人機(jī)和飛鳥目標(biāo)的正常跟蹤。

表1 無人機(jī)與飛鳥目標(biāo)的F均值Table 1 Mean value of F of UAV and flying bird targets
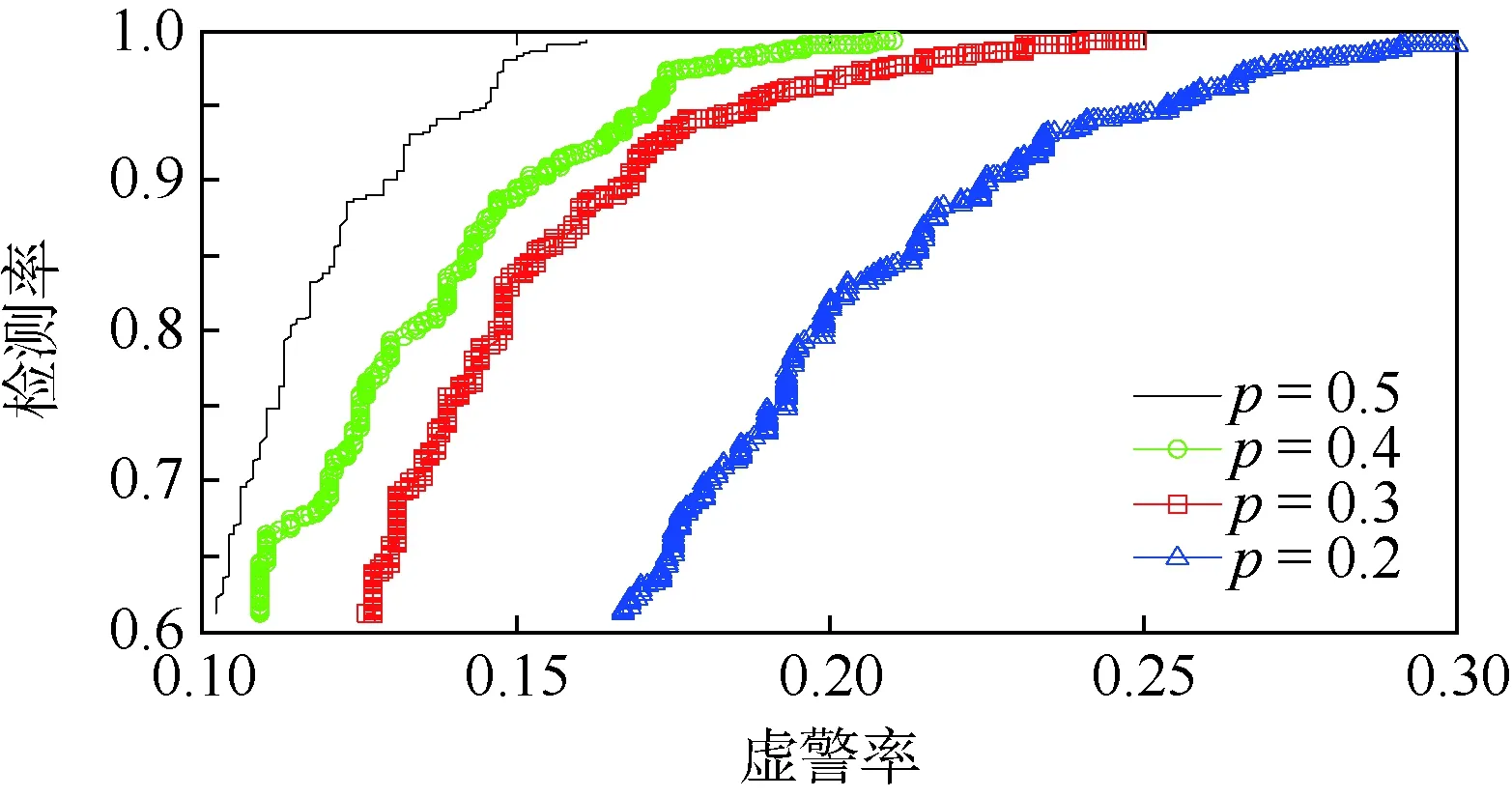
圖5 無人機(jī)目標(biāo)識(shí)別的ROC曲線Fig.5 ROC curves of UAV target recognition
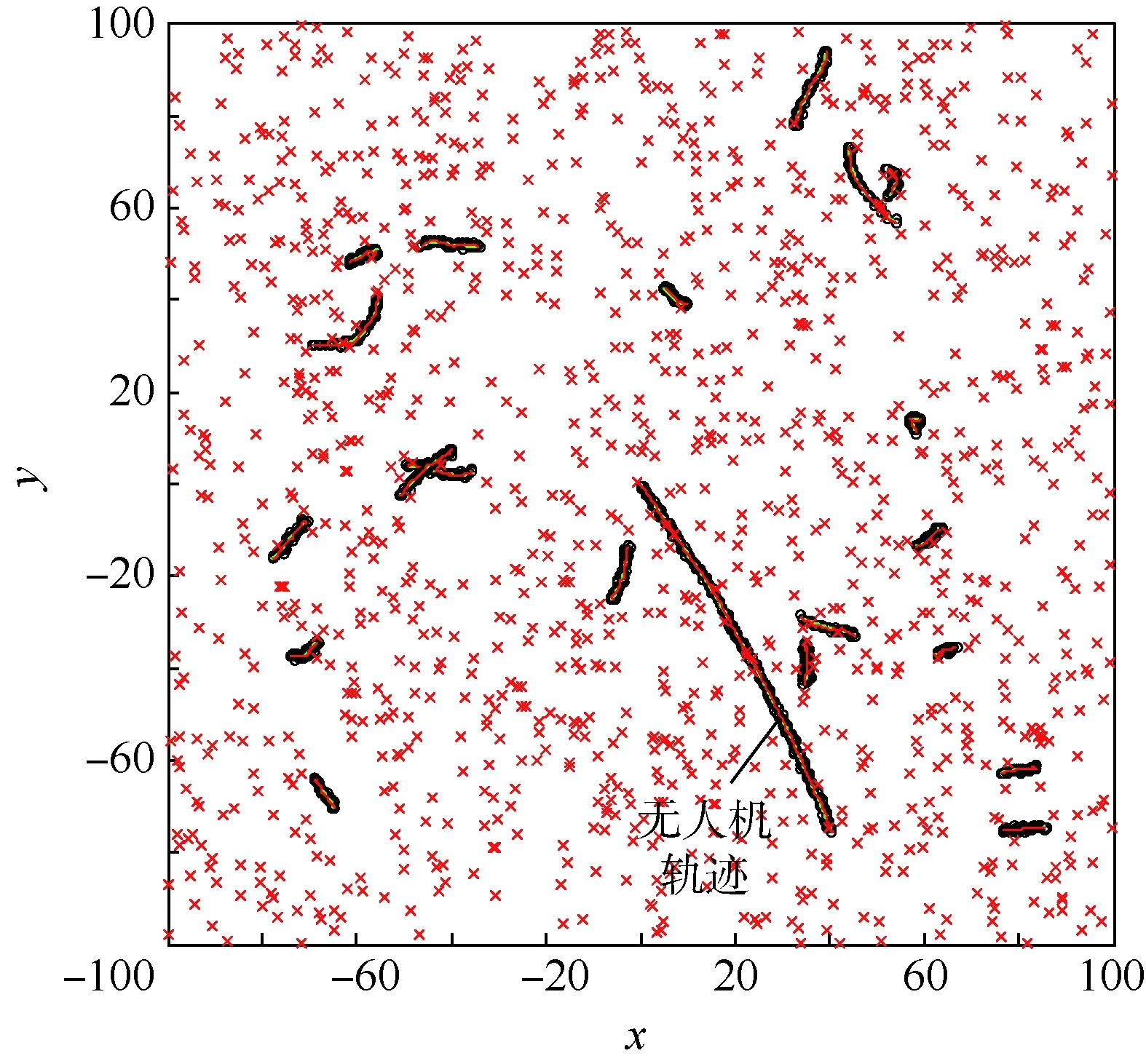
圖6 加入背景噪聲的目標(biāo)軌跡仿真Fig.6 Simulated trajectories of targets with background clutters
圖7給出了p=0.5時(shí),有無背景噪聲條件下的無人機(jī)目標(biāo)識(shí)別ROC曲線對比,本次仿真中平均每步仿真加入5個(gè)噪聲。可見,一定數(shù)量的背景噪聲基本不會(huì)對本文方法的目標(biāo)識(shí)別性能造成影響。
圖7 背景噪聲環(huán)境中的無人機(jī)目標(biāo)識(shí)別ROC曲線Fig.7 ROC curves of UAV target recognition in background cluttered environment
3 實(shí)測數(shù)據(jù)驗(yàn)證
基于在廣西北海機(jī)場安裝的低空雷達(dá)監(jiān)視系統(tǒng),目前已采集了大量含有無人機(jī)和飛鳥目標(biāo)的雷達(dá)實(shí)測數(shù)據(jù),前期研究已實(shí)現(xiàn)了對各類目標(biāo)的檢測跟蹤[1, 17-20]。圖8為某時(shí)段采集的北海機(jī)場雷達(dá)實(shí)測數(shù)據(jù),量測數(shù)據(jù)由“°”表示,其中包含了一架測試放飛的大疆精靈3無人機(jī)及機(jī)場自然環(huán)境中活動(dòng)的若干飛鳥目標(biāo),以及少量背景噪聲,由“×”表示。圖8所示雷達(dá)數(shù)據(jù)中的飛鳥目標(biāo)多為覓食狀態(tài)中的本地留鳥,飛行距離較短且機(jī)動(dòng)性較高。本節(jié)將采用本文方法對其中的無人機(jī)和 飛鳥目標(biāo)進(jìn)行跟蹤,剔除背景噪聲,并做識(shí)別分類,驗(yàn)證方法的可行性。

圖8 北海機(jī)場低空雷達(dá)監(jiān)視數(shù)據(jù)Fig.8 Low-altitude radar surveillance data at Beihai Airport
在工程應(yīng)用中,首先通過人工方法識(shí)別出無人機(jī)和飛鳥目標(biāo),計(jì)算出不同目標(biāo)的模型轉(zhuǎn)換概率估計(jì)值,進(jìn)而設(shè)定無人機(jī)和飛鳥目標(biāo)的分類閾值;在不同的測試環(huán)境中,該閾值往往不同,需要通過實(shí)驗(yàn)的方法進(jìn)行測定,以確保系統(tǒng)的識(shí)別效果。圖9給出了采用本文方法處理圖8所示雷達(dá)數(shù)據(jù),在不同分割閾值條件下無人機(jī)目標(biāo)的跟蹤與識(shí)別結(jié)果,目標(biāo)軌跡由實(shí)線表示,背景噪聲被完全剔除。部分飛鳥目標(biāo)的機(jī)動(dòng)性不高,其運(yùn)動(dòng)模型與無人機(jī)接近,當(dāng)閾值偏高時(shí),仍然殘存大量飛鳥目標(biāo),只有當(dāng)閾值設(shè)置足夠低時(shí)(見圖9(d),S=0.005),才能剔除全部飛鳥目標(biāo)并保留無人 機(jī)目標(biāo)。參照圖9,表2給出了不同閾值條件下,無人機(jī)目標(biāo)的識(shí)別結(jié)果及飛鳥等其他低空目標(biāo)的虛警具體數(shù)量。

圖9 無人機(jī)目標(biāo)跟蹤與識(shí)別結(jié)果示意圖Fig.9 Schematic of UAV target tracking and recognition results
表2 無人機(jī)目標(biāo)識(shí)別結(jié)果Table 2 UAV target recognition results
4 結(jié) 論
本文利用常規(guī)低空雷達(dá)獲取的非合作目標(biāo)信息,以目標(biāo)運(yùn)動(dòng)模型轉(zhuǎn)換頻率為特征,提出了一種輕小型無人機(jī)與飛鳥目標(biāo)識(shí)別方法。通過仿真與雷達(dá)實(shí)測數(shù)據(jù)驗(yàn)證了本文方法的有效性,得出以下結(jié)論:
1) 本文方法適用于常規(guī)機(jī)械掃描監(jiān)視雷達(dá)數(shù)據(jù),能夠利用目標(biāo)運(yùn)動(dòng)方向、速度、位置等較少的回波信息較好地區(qū)分出無人機(jī)和飛鳥目標(biāo)。
2) 由仿真數(shù)據(jù)可知,無人機(jī)目標(biāo)運(yùn)動(dòng)模型轉(zhuǎn)換估計(jì)頻率的方差均值比機(jī)動(dòng)性較高的飛鳥目標(biāo)低一個(gè)數(shù)量級(jí)以上。
3) 對于部分機(jī)動(dòng)性較低的飛鳥目標(biāo),其運(yùn)動(dòng)方式與無人機(jī)近似,采用本文方法易導(dǎo)致虛警,需要結(jié)合目標(biāo)微動(dòng)特征等其他精細(xì)化處理技術(shù)加以識(shí)別分類[10]。
4) 目標(biāo)的微動(dòng)特征在一定程度上反映了目標(biāo)固有的運(yùn)動(dòng)屬性,與目標(biāo)的結(jié)構(gòu)和電磁散射特性有著密切關(guān)聯(lián),因此,隨著低空監(jiān)視雷達(dá)探測性能的逐步提升,微多普勒特征必將成為無人機(jī)等低慢小目標(biāo)探測與識(shí)別的重要手段和途徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56