基于轉臺角度的遠場圖像快速校正方法研究
2019-04-25 07:34:46
長春理工大學學報(自然科學版) 2019年2期
關鍵詞:系統
(長春理工大學 光電工程學院,長春 130022)
激光半主動制導武器在高技術戰爭中愈發受到人們的重視,是我國科技國防戰略的重點[1]。激光半主動制導武器由激光制導導彈、激光照射器組成。激光照射器照射目標,激光制導導彈根據激光光斑對目標進行打擊,其中激光照射器命中率精度是評估激光照射器性能的重要指標[2],命中率精度嚴重影響制導導彈的制導精度。畸變的遠場圖像對激光照射器命中率精度的快速性和準確性有很大影響[3]。為了提高激光照射器命中率精度,需對遠場圖像進行快速畸變校正。
目前對圖像進行畸變校正的方法有:長春光學精密機械與物理研究所代勤[4]根據成像系統的成像機理對圖像進行校正的方法;北京遙感設備研究所曹天陽等人[5]利用LM算法迭代建立八參數透視畸變模型對圖像進行校正的方法;長春理工大學王延海等人[6]構建變換矩陣求得圖像校正模型,進而對圖像進行透視畸變校正的方法。
以上方法對特定條件下透視畸變圖像均有較好的校正效果,但對激光照射器性能監測系統,以上方法在操作簡單、計算快速、處理準確等方面并不完全滿足要求。
針對以上問題,為了精確校正測試系統中動態目標靶板,提出基于轉臺相對角度遠場圖像快速校正方法,該方法僅需要對一張參考圖像進行特征點選取,再利用參考圖像的轉臺角度得到畸變校正模型,最終實現對連續的遠場圖像進行快速校正。該方法滿足激光照射器性能監測系統的要求,具有實驗條件要求低、處理速度快、識別精度高、原理簡單、耗時短,大大簡化了計算復雜度等優勢。
1 激光照射器性能監測系統工作原理
1.1 激光照射器性能監測系統
激光照射器性能監測系統包括激光照射器、目標靶板、成像系統、測試軌道、轉臺以及控制終端,如圖1所示;激光照射器設置在空中,對搭載在測試軌道上并水平移動的目標靶板進行照射;成像系統搭載在轉臺上,轉臺對目標靶板進行實時跟蹤,進而使成像系統對目標靶板進行跟蹤拍攝,對合作目標[7]連續采集得到圖像并保存。
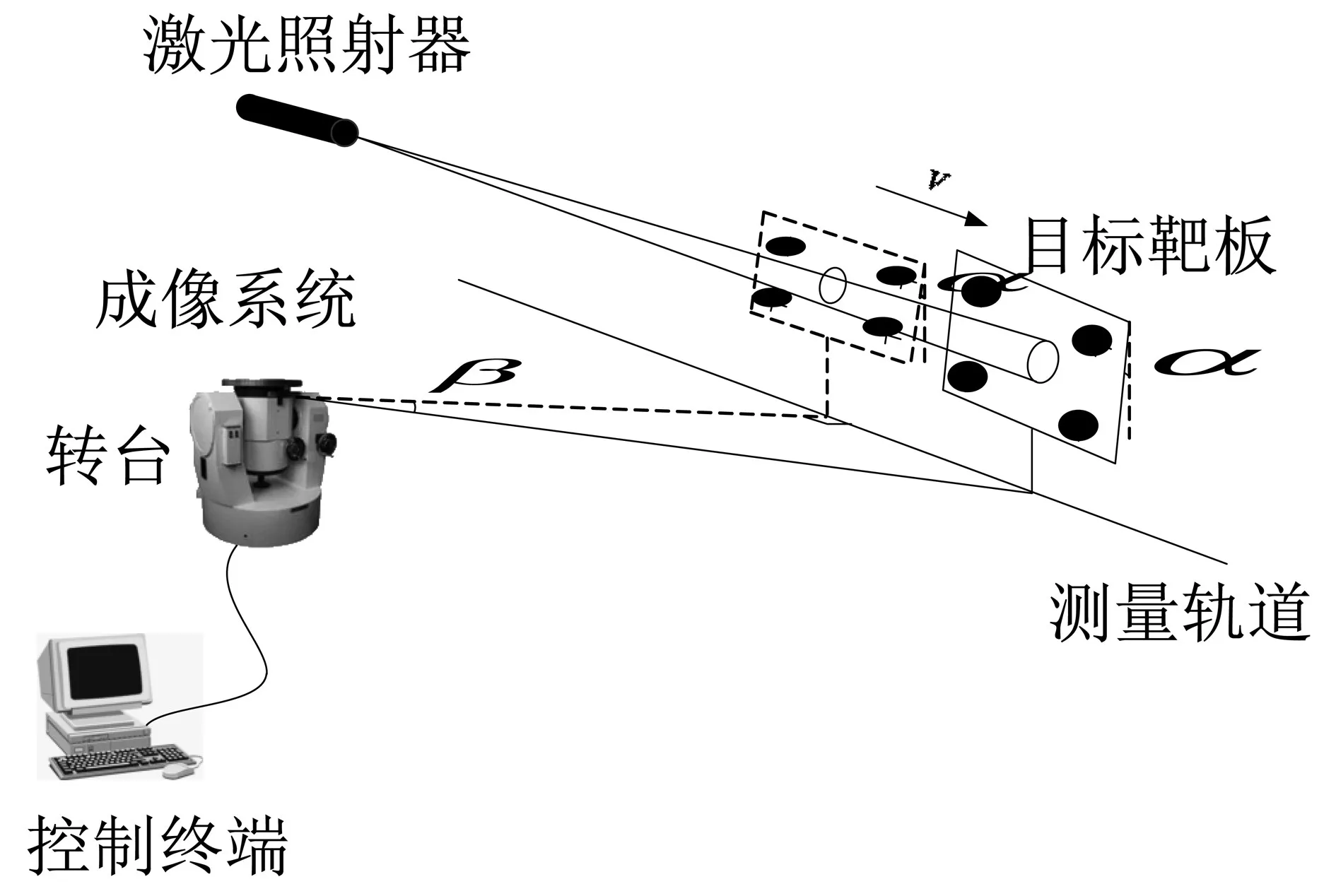
圖1 激光照射器性能監測系統示意圖
1.2 激光照射器性能監測系統數據框圖
如圖2所示,通過BD/GPS/時統單元對成像系統提供實時時間,成像系統為圖像及數據處理單元提供圖像及數據,力矩電機及編碼器提供俯仰、方位編碼數據,圖像及數據處理單元對帶有俯仰、方位編碼數據的圖像進行處理。
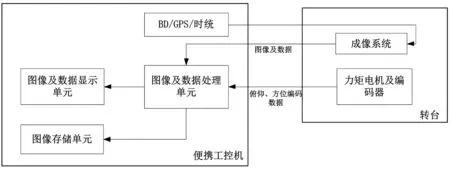
圖2 激光照射器性能監測系統數據流框圖
激光照射器性能檢測系統中,由于搭載成像系統的轉臺其瞄準軸與目標靶板存在實時變化的夾角等環節的影響,采集到的圖像存在不同程度的畸變[8],成像系統光軸與目標靶板法線的夾角越大、目標靶板與成像系統距離越遠,畸變越嚴重,嚴重影響光斑大小、照射精度、圖像融合等技術參數的計算[3],更有甚者會造成計算錯誤,因此,連續遠場圖像的畸變校正顯得尤為重要。
2 連續的遠場圖像畸變校正原理
2.1 遠場圖像畸變校正原理
目標靶板距成像系統Lkm,目標靶板沿測試軌道運動,其運動距離與Lkm相比很小,可等效為實際靶板圖像在成像系統光軸方向有k倍的縮放。
如圖3所示,實際靶板圖像經過縮放后得到真實畸變靶板圖像,真實畸變靶板圖像在空間水平及俯仰方向均有畸變,校正后即可得到真實非畸變靶板圖像。
對于空間水平及俯仰方向有畸變的圖像,一般采用特征點匹配法[9]、BP神經網絡的物鏡畸變改正模型[10],根據成像系統的成像機理進行圖像畸變校正等方法。
畸變圖像與校正后圖像關系如公式1[11]:

式中,f畸變(x,y)為畸變圖像矩陣,T校正(x,y)為校正矩陣,f校正(x,y)為未畸變圖像矩陣。
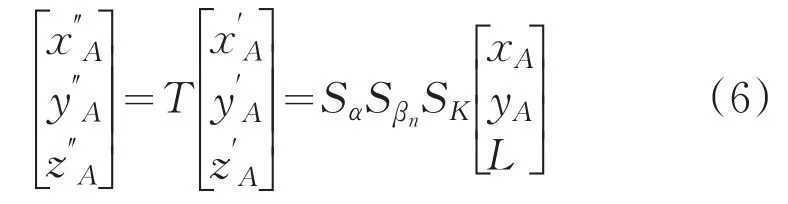
為滿足激光照射器性能檢測系統要求,本文將公式中T校正(x,y)轉換為以轉臺相對角度β為參量的校正矩陣T校正(β,α,k),其中k為實際靶板圖像尺度變換縮放系數。即如公式2:

2.2 遠場圖像的校正矩陣模型
基于轉臺相對角度得到參考靶板圖像的標準校正矩陣,根據標準校正矩陣得到校正矩陣模型,最后將連續遠場圖像的轉臺相對角度βn、目標靶板與地面法線的夾角α輸入到校正矩陣模型內,就能實現連續遠場圖像的快速校正。遠場圖像校正矩陣模型算法框圖如圖4所示。
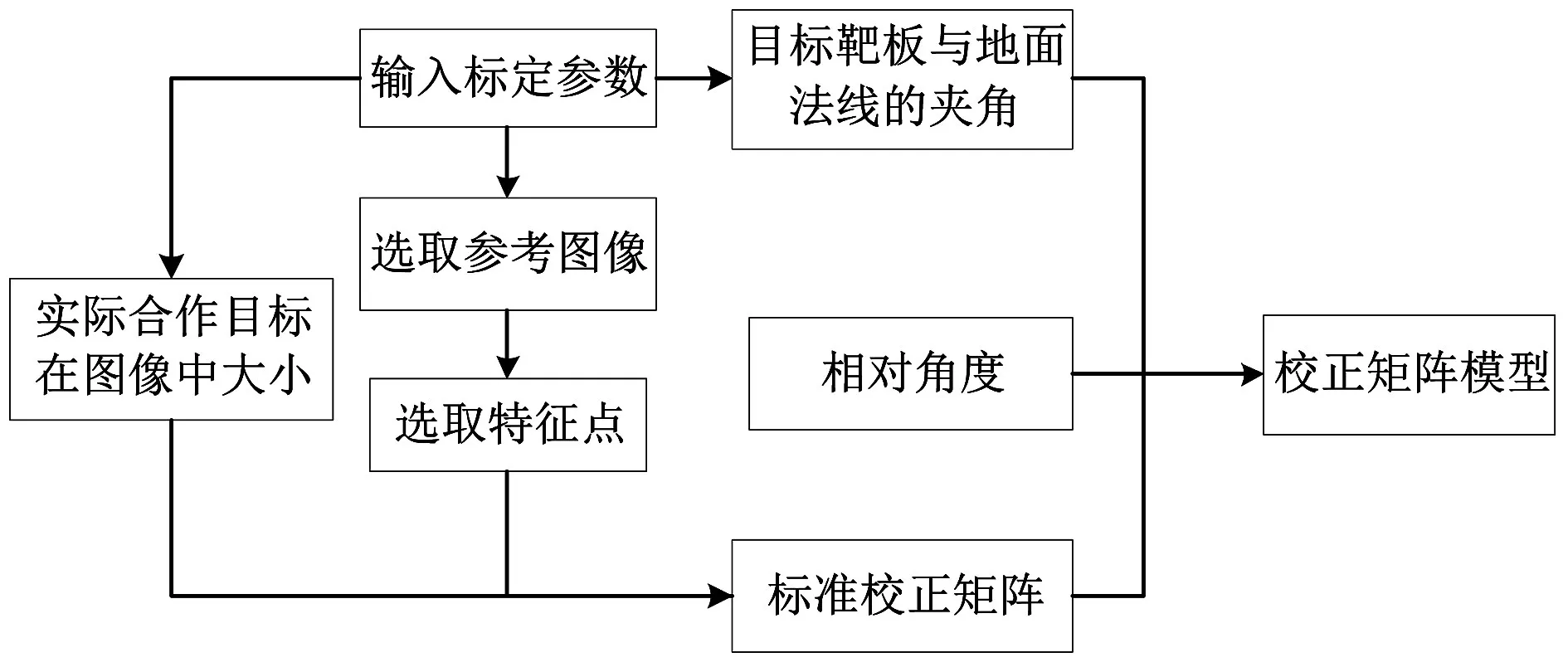
圖4 遠場圖像校正矩陣模型算法框圖
基于轉臺相對角度確定參考靶板圖像的標準校正矩陣,根據標準校正矩陣得到校正矩陣模型。
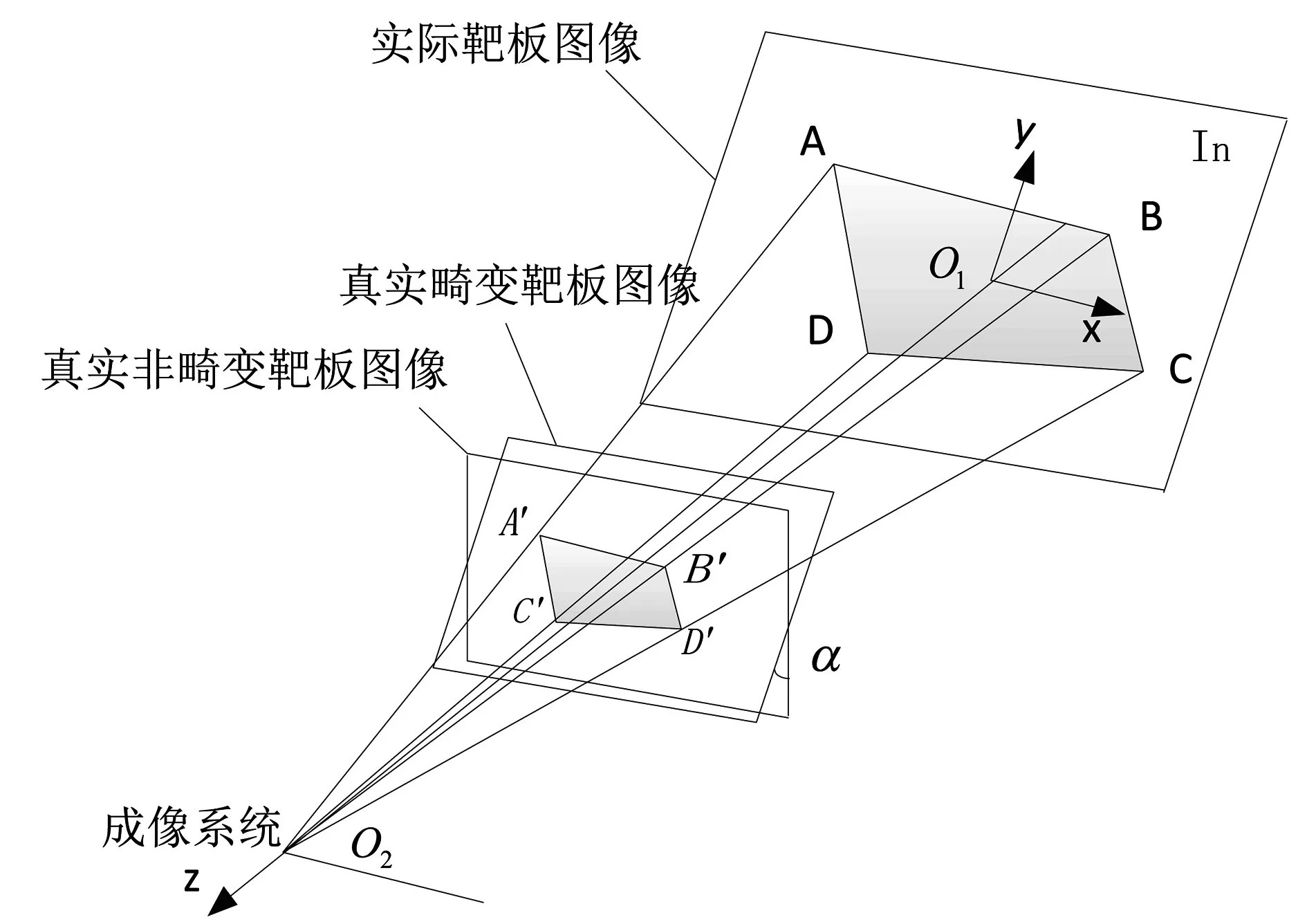
圖5 目標靶板坐標系示意圖
如圖5所示,建立坐標系XYZ,坐標系原點O1為參考圖象In四個合作目標所組成矩形的中心,坐標系的Z軸由O1指向成像系統的光學中心O2,坐標系的XY軸為過O1且垂直于Z軸的橫縱方向。目標靶板距成像系統L公里處,設參考靶板圖像左上的合作目標A坐標為(xA,yA,L),對點A作空間縮放得到A在真實畸變靶板圖像上坐標,如公式3所示:


公式(3)、(4)聯立,可求得縮放系數kn:

式中,α為目標靶板與地面法線的夾角、βn為轉臺相對角度、L為目標靶板與成像系統垂直距離。
式中,T為畸變校正模型矩陣;Sα為關于α的變換矩陣,Sβn為關于βn的變換矩陣,Sk為尺度變換矩陣。式中的矩陣如公式7、8、9下所示:
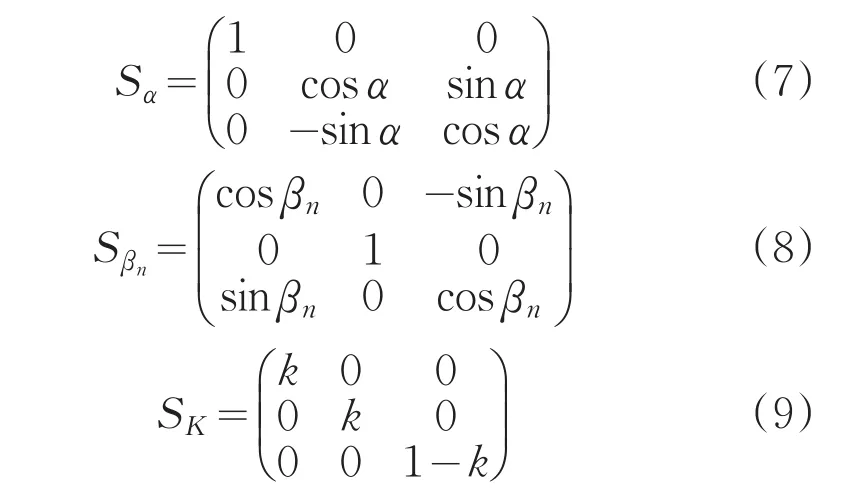
式中:α為所述目標靶板與地面法線的夾角,βn為所述轉臺相對角度,k為圖像尺度變換縮放系數。
2.3 轉臺相對角度
轉臺方位角由光電軸角編碼器提供完成俯仰、方位的實時測量,而后將俯仰、方位編碼數據加載至對應的目標靶板圖像。成像系統得到目標靶板圖像,該圖像左上方條碼包含時間信息及轉臺角度信息,對該條碼進行讀取,即可得到靶板圖像對應的轉臺方位角。
對采集到的連續遠場圖像中的條碼進行識別,得到連續遠場圖像的轉臺方位角θn并存儲,根據公式(10)及轉臺初始方位角θ0,計算每幅遠場圖像的轉臺相對角度βn:

3 試驗及結果分析
3.1 激光照射性能檢測系統模擬試驗
根據本文提出的畸變校正方法模擬了外場試驗,選用美國IMPERX公司的ICL-B1410型相機為成像設備,該相機的像元尺寸為6.45μm×6.45μm,光譜響應范圍為0.3~1.1μm,圖像分辨率為1392×1040,幀頻為50fps。采用21位絕對式光電軸角編碼器,位數為21位,輸出形式為并行21位自然二進制代碼,TTL電平,8位總線輸出,RS485接口。模擬激光照射器性能監測系統實際測量環境試驗:目標靶板上四個黑色圓形合作目標組成的標準矩形寬高為1455mm×845mm,保持目標靶板與地面法線夾角為15°,并沿事先設定測試軌道的路線運動,成像系統距測試軌道的垂直距離為0.82452km,成像系統固定至轉臺上,隨目標靶板移動轉臺轉動,成像系統跟蹤目標靶板,連續采集圖像,并進行數據保存。
根據本文的校正方法,將圖像序列進行相關處理,從而實現對連續遠場圖像的畸變校正。
3.2 實驗數據及分析
根據以上算法,對存儲后的數據進行處理,存儲數據共采集504幀圖像,處理后選取第1、41、101、141、181、291、331、391、431、451幀特征圖像,如圖6為第391幀圖像及其校正效果圖,其對比圖如下:
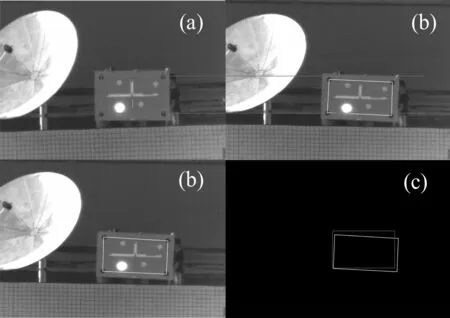
圖6 第391幀圖像及校正效果對比圖
圖6可以明顯看到畸變校正效果,目標靶板圖像在水平方向及垂直于水平方向均存在一定程度畸變,其中靶板與地面夾角為15°,垂直于水平方向畸變角度由條碼得到,經過畸變程序對其進行校正后,靶板圖像的畸變程度得到了明顯改善。
為準確評估本文提出的基于轉臺角度的遠場畸變校正方法,對比畸變圖像、基于轉臺角度的畸變校正圖像對應的靶板尺寸變化,表1給出了在保持靶板與地面夾角為15°的情況下進行外場實驗的激光照射性能監測系統實驗數據(單位:像素)。
其中根據成像系統像元尺寸、成像系統焦距及成像系統距測量軌道的垂直距離可以求得靶板在遠場圖像中的理想靶板尺寸為149.1×86.59像素。以此作為畸變校正的評價因子。表2給出了激光照射性能監測系統分析數據(單位:像素)。
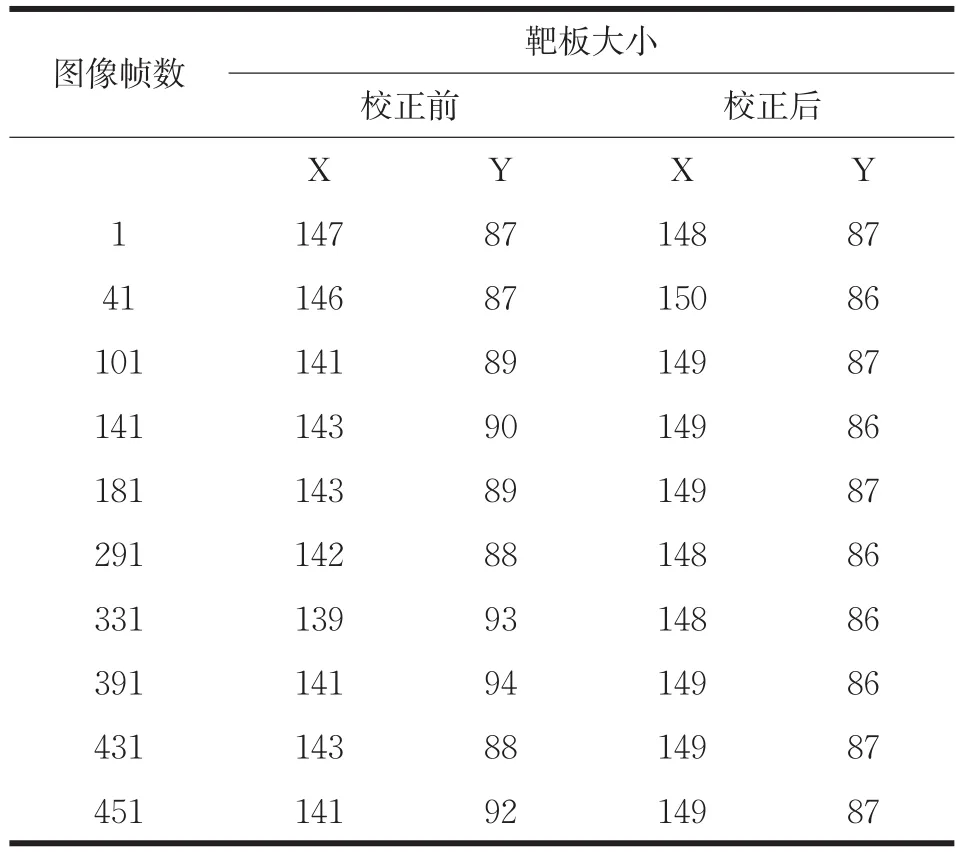
表2 校正前后合作目標尺寸比較表
從表2可以看出遠場圖像校正前,第1、41、101、141、181、291、331、391、431、451幀特征圖像中合作目標寬為139~147像素,合作目標高為87~94像素;遠場圖像校正后,合作目標寬為147~149像素,合作目標高為85~88像素。
從圖7可以看出第1、41、101、141、181、291、331、391、431、451幀特征圖像中,校正前合作目標寬高與理想合作目標寬高相比較起伏較大,而校正后合作目標寬高與理想合作目標寬高相比較很穩定。
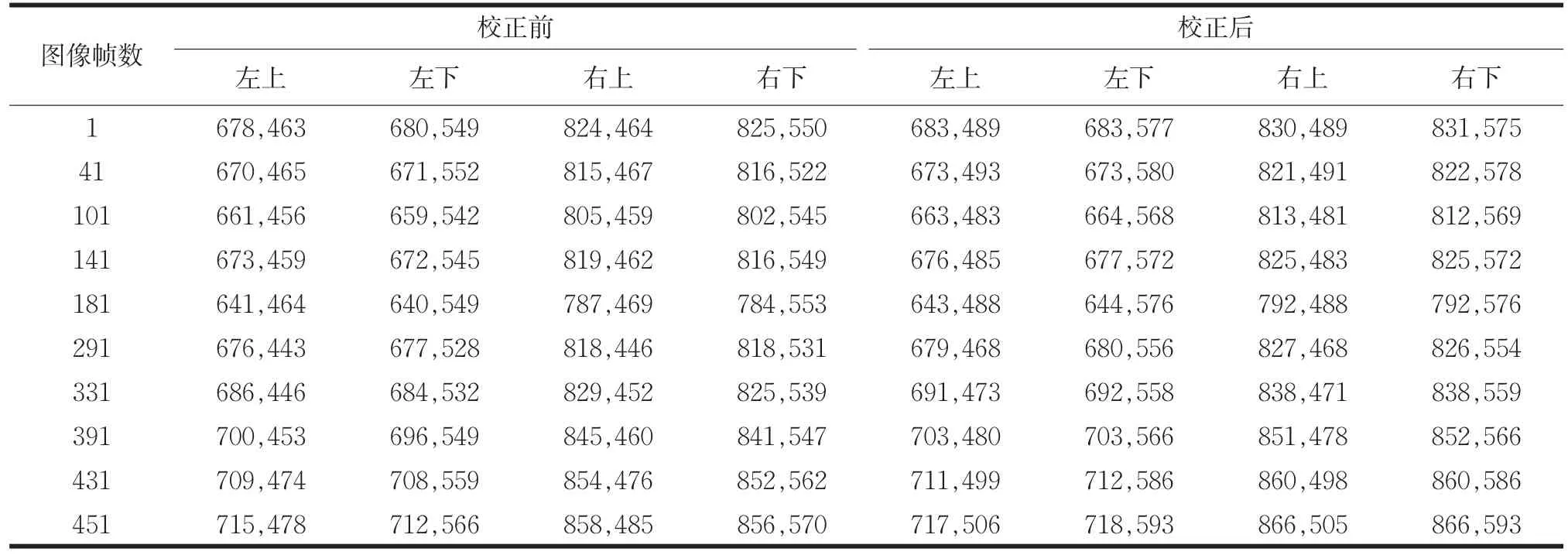
表1 校正前后靶板圖像數據
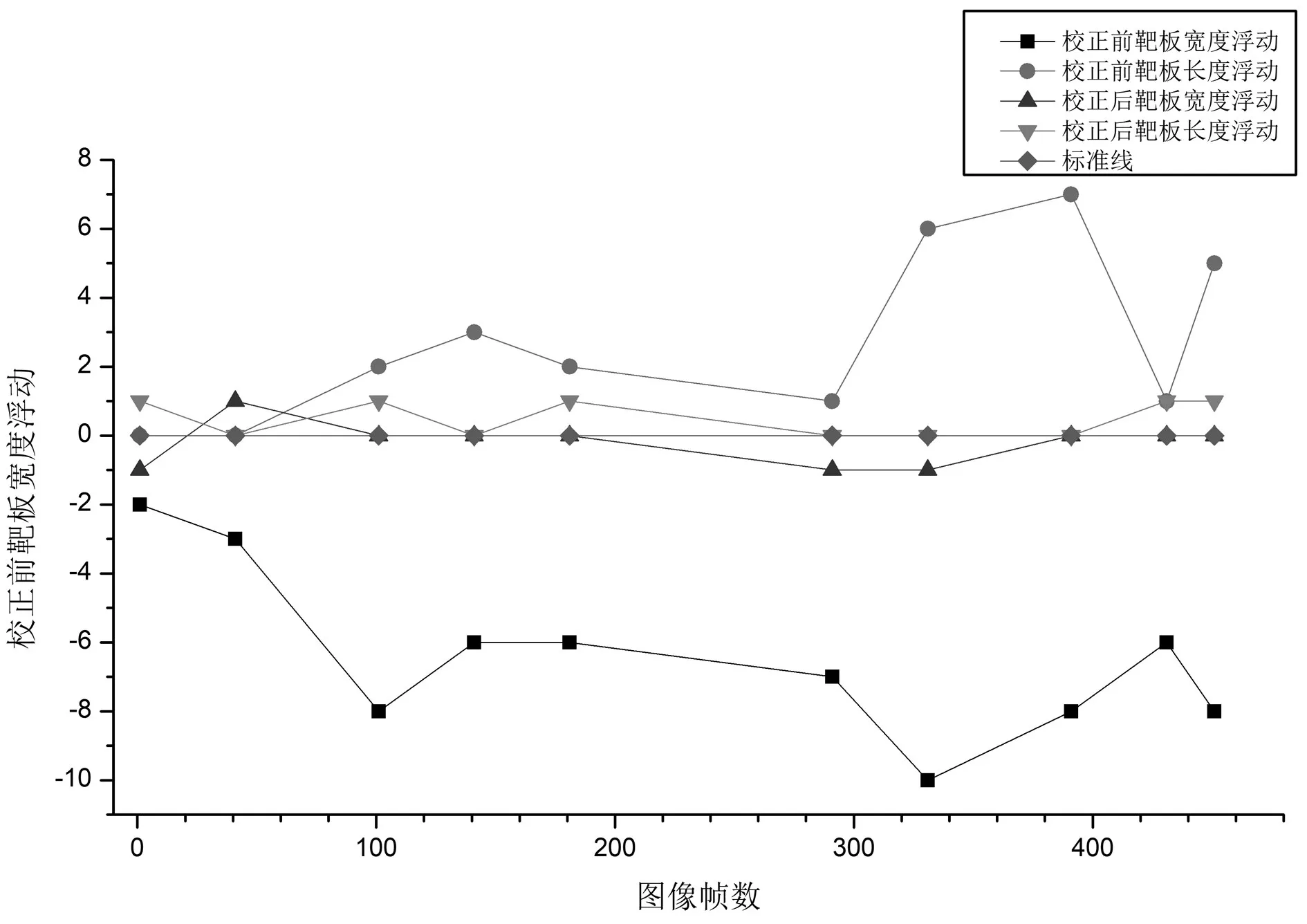
圖7 合作目標校正前后寬高對比圖
通過多次試驗,對實驗數據進行處理,根據誤差理論,合作目標的識別精度計算公式如(11)、(12):
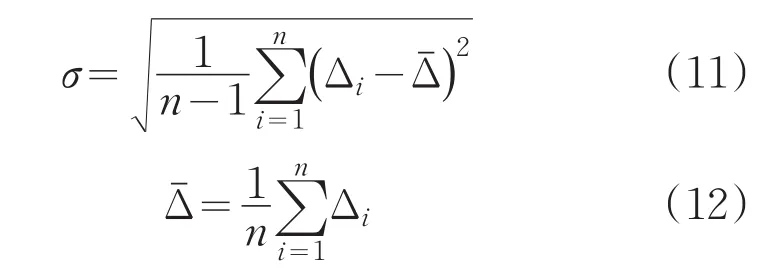
式中,σ為測量精度,Δi為第i幀合作目標長或寬,為n次測量均值,n是測量圖像總幀數,校正前合作目標寬的RMS值為142.6,合作目標長RMS值為89.73;校正后合作目標寬RMS值為148.8,校正前合作目標長的RMS值為86.50,校正后合作目標寬的校正精度為0.3pixel,合作目標寬長的校正精度0.09pixel。即基于轉臺角度的遠場圖像畸變校正精度為0.3pixel。
4 結論
本文提出了基于轉臺相對角度作為畸變參量,對遠場圖像進行畸變校正的方法。利用轉臺相對角度有效解決了多次選取特征點對連續遠場光斑圖像進行畸變校正的耗時、算法復雜等問題,克服了目標識別不完整,命中率精度低,定位不準確等缺陷。以轉臺相對角度作為畸變參量確定一幅目標靶板圖像的校正矩陣,將每幅待校正的遠場目標靶板圖像的轉臺相對角度、目標靶板與地面法線的夾角輸入校正矩陣內,實現多幅遠場目標靶板圖像的校正,不需要對每張遠場圖像進行手動選取特征點,也不需要對每張目標靶板圖像重新求取校正矩陣,耗時短、計算簡單,滿足激光照射性能監測裝置的要求,校正的精度為0.3個像素。結果表明:該方法在目標靶板連續運動時仍具有較好的校正效果,在外場激光照射精度測量過程中發揮了重要的作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32