基于滑模控制的卡爾曼濾波在列車定位中的研究
2019-04-24 01:01:58張亞東李科宏鄧祎寧
鐵道標準設計 2019年5期
關鍵詞:卡爾曼濾波
葛 淼,張亞東,李科宏,鄧祎寧
(西南交通大學交通信息工程及控制重點實驗室,成都 611756)
1 概述
列車測速定位技術作為列控系統的三大關鍵技術之一,其準確度對于提高列車的安全性和運行效率有著重要作用[1-3]。在實際應用中,由于諸多因素的影響,測速定位誤差不可避免。為了提高定位精度,專家學者提出了很多方法。文獻[4]對列車位置進行了不確定性算法研究,該方法雖然保證了列車運行過程中的安全性,但由于對位置的估算都采用最惡劣情況,因此運行效率較低。文獻[5]通過增加應答器數量,縮短應答器之間的間距來校準惡劣條件下列車的定位。雖然保證了整個定位的精確性,但是對整個系統而言,增加了造價成本和維修成本。文獻[6]采用補償方式,對空轉打滑的位移誤差進行修正。文獻[7]采用改進聯合卡爾曼濾波的算法,該算法通過其他信息采集器彌補了某些信息采集器可能出現的誤差,適應能力強。文獻[8]采用小波神經網絡輔助卡爾曼濾波,其濾波結果和適應性都很好,但是其需要處理的數據量龐大。文獻[9]采用了擴展卡爾曼濾波進行定位,該方法能夠修正偏差較小的數據。
滑模變結構控制是變結構控制系統的一種控制策略。該控制可以使系統在一定特性下沿規定的狀態軌跡小幅度、高頻率的上下運動,即所謂的滑動模態。這種滑動模態可以通過調節相應的參數進行設計。由于滑模控制器的滑動模態與系統的參數及擾動無關,能夠在一定程度上改善由空轉或打滑引起誤差,因此,采用基于滑模控制的卡爾曼濾波結構能夠更加進一步的提高精度[10]。在參考上述文獻的基礎上,將基于滑模的改進卡爾曼濾波算法用于列車定位并通過仿真進行驗證。
2 測速定位原理
本文采用最常見的脈沖速度傳感器和加速度計組合定位的方式進行建模。
2.1 輪軸速度傳感器工作原理
列車走行的距離主要是通過輪軸速度傳感器得出[11],其工作方式為:當傳感器檢測到車輪轉動時即會產生一定的脈沖序列,那么根據脈沖序列可以計算出列車的走行距離[12]。
(1)
式中D——列車車輪直徑,m;
nk——k周期的脈沖個數,個;
n——車輪轉動1周輸出的脈沖數;
yk——k周期列車里程計算值,m。
2.2 加速度計工作原理
加速度計是一種可以測量加速度力的電子設備。其工作原理是通過壓電效應實現的[13]。加速度傳感器內部晶體在加速度作用下形變而產生電壓,電壓又與加速度存在相應的關系。
電壓值U與加速度a之間關系可表示為
U=φa
(2)
式中φ——壓電系數。
3 卡爾曼濾波算法
3.1 輪軸速度傳感器誤差補償模型
采用輪軸速度傳感器能夠減少數據處理和降低通信產生的負擔,但在列車運行過程中,存在空轉、打滑(這里暫不考慮測量誤差)的誤差,設dk為k周期列車運行時的補償值;sk為k周期列車運行時,不含測量誤差的真實值。因此,可以將式(1)改寫為
sk=yk+dk
(3)
空轉時,yk增加,則補償值dk為負值;滑行時,sk減小,補償值dk為正值。
3.2 加速度傳感器誤差補償模型
在加速度測量過程中,由于機器本身測量過程中存在擾動,會產生一個誤差,因此用εk來表示誤差補償,則
(4)

將上面兩種誤差設為過程誤差。
3.3 狀態模型的建立
首先離散化列車的走行過程,設采樣時間為T,采樣間隔足夠小且為t。因為采樣間隔足夠小,可以將兩個采樣點之間看成勻加速運動,因此根據運動學公式可以得到
(5)
式中,ωk,μk分別為加速度和速度的合成誤差,稱為過程噪聲。
3.4 觀測模型的建立
對于列車定位來說,用輪軸速度傳感器的里程計算值作為觀測量能夠簡化程序。因此,這里將輪軸速度傳感器的里程方程作為觀測方程。
Sk=sk+Dk
(6)

3.5 卡爾曼濾波模型求解
卡爾曼濾波模型的求解過程如下[14-16]。
將式(5)狀態方程和式(6)觀測方程用矩陣的形式表示成如下。
狀態方程
X(k+1)=φX(k)+BA(k)+ΓW(k)
(7)
即
(8)
觀測方程
Y(k)=HX(k)+V(k)
(9)
即
(10)

則:
(1)首先基于初始輸入量預測下一個系統狀態方程

(11)
(2)此時的協方差為
P(k|k-1)=φP(k-1|k-1)φT+Q(k-1)
(12)
(3)濾波增益方程為
K(k)=P(k|k-1)HT[HP(k|k-1)HT+R(k)]-1
(13)
(4)根據前面的公式遞推濾波估計方程


(14)
(5)相應的協方差更新
P(k|k)=[I-K(k)H]P(k|k-1)
(15)
4 基于滑模控制的改進卡爾曼濾波
對于組合定位來說,卡爾曼濾波求解的值在加減速過程中,空轉和打滑造成的誤差不能得到很好的修正。而滑模控制的滑動模態不受系統的參數和擾動的影響[17-18],能夠很好地降低由空轉和打滑所帶來的誤差影響。因此采用基于滑模控制的改進卡爾曼濾波的方式來進一步減少空轉和打滑所造成的誤差。
則基于滑模控制的改進卡爾曼濾波結構如圖1所示。

圖1 基于滑模控制的卡爾曼濾波結構
由于這里主要討論的是加速和減速過程中的空轉和打滑的影響。假設加速度計只存在測量誤差,不存在由于車體不平衡造成的過程誤差。則滑模控制器的算法如下[19]。
(1)將輪軸速度傳感器得到的里程計算值經滑模濾波后輸出值設為yv,則
l(k+1)=y(k)+Cu(k)
(16)
式中,C為單位陣。
(2)確定位置指令r(k),這里的位置指令即為真實值,即
r(k)=s(k)
(17)
(3)設位置指令的變化率為dr(k),取
R=[r(k);dr(k)],R1=[r(k+1);dr(k+1)]
(18)
(4)這里選取線性外推法預測r(k+1)及dr(k+1),則
r(k+1)=2r(k)-r(k-1)
(19)
dr(k+1)=2dr(k)-dr(k-1)
(20)
(5)設切換函數為sqh(k),則
sqh(k)=CeE=Ce(R-y(k))
(21)
式中,Ce=[c,1]。參數c表示滑模面的斜率。則切換函數的遞推式為
sqh(k+1)=Ce(R1-y(k+1))
(22)
(6)設控制率為u(k),結合式(7),則
u(k)=(CeB)-1(CeR1-CeφX(k)-
CeBA(k)-sqh(k+1))
(23)
(7)設切換函數為指數趨近率,則
sqh(k+1)=sqh(k)+
t(-εsgn(sqh(k))-qsqh(k))
(24)
式中q——趨近速度參數;
ε——符號函數的增益參數;
sgn(x)——符號函數,其性質為,
當x>0,sgn(x)=1;
當x<0,sgn(x)=-1;
當x=0,sgn(x)=0。
(8)最后將得到的l值按照前面卡爾曼濾波的步驟進行求解。
同理可將加速度計得到的加速度值通過滑模得到相應的輸出值。
5 仿真分析
由于獲取現場數據較難,本文利用仿真數據對上面的算法進行分析說明。
設列車運行過程為一維運動;采樣間隔t=0.01 s,根據文獻[20]可知,對于卡爾曼濾波來說,系統噪聲協方差矩陣Q設置越大,表示對狀態方程置信度越低;觀測噪聲協方差R越大,表示對觀測方程置信度越低;協方差矩陣P初值越大,表示對初值的置信度越低,算法收斂效果越好,但是P初值如果過大,算法結果會出現超調現象,震蕩劇烈。因此,R、Q和P需要通過調試得出。
本文的仿真過程分為3個過程,即加速過程、勻速過程和減速過程。過程的真實值設定為:列車以-1 m/s2的加速度進行10 s的減速運動。
仿真中,在列車加速過程中加入空轉誤差隨機數和測量誤差隨機數;在勻速過程中,只加入測量誤差隨機數;在減速過程,加入打滑誤差隨機數和測量誤差隨機數。即在整個仿真過程中不考慮由于車體不平衡造成的加速度計的過程誤差。
首先采用卡爾曼濾波進行濾波,在卡爾曼濾波器參數設計中,觀測噪聲協方差R不宜過大,R越大,對觀測結果越不置信,為了更好地反映滑模加卡爾曼合成濾波的效果,將參數設置為

通過Matlab軟件對加速過程進行仿真,得到的時間位移曲線如圖2所示。
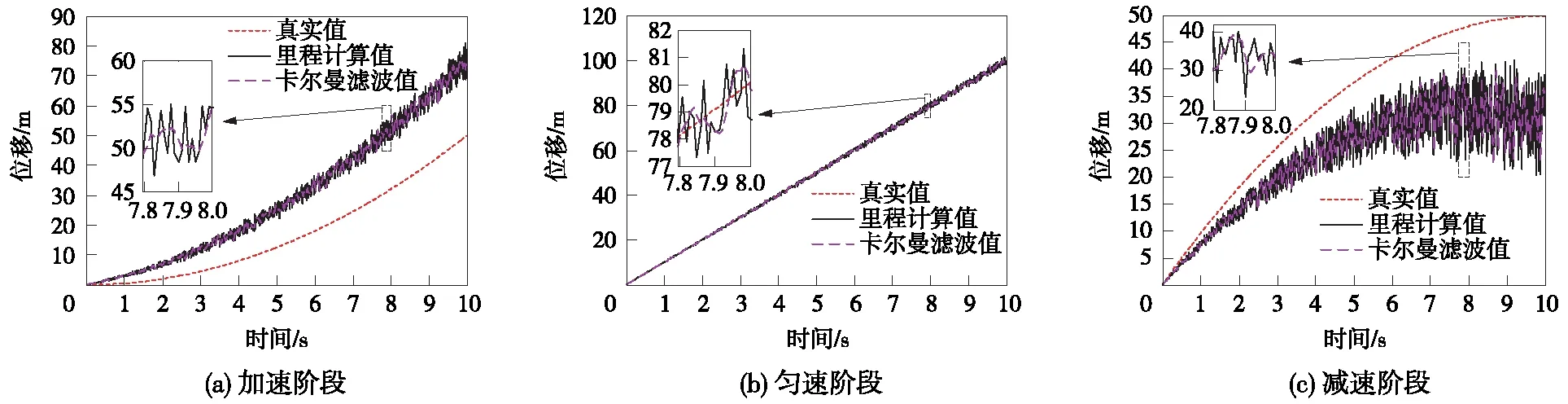
圖2 卡爾曼濾波時間-位移曲線對比
從圖2(a)可以看出,在加速階段,卡爾曼濾波能夠消除一定的抖動,但對加速過程中造成的空轉誤差修正結果較差。
從圖2(b)可以看出,在勻速階段,卡爾曼濾波能夠一定程度上消除由測量引起的系統誤差。
從圖2(c)可以看出,在減速階段,卡爾曼濾波能夠消除一定的抖動,但對減速過程中造成的打滑誤差修正結果較差。
然后采用基于滑模的改進卡爾曼濾波方式進行濾波。根據文獻[21]可知,對于滑模控制來說,參數q主要影響切換函數的過程,參數c是滑模面的斜率,參數ε決定系統的抖振幅度。
為了直觀地比較濾波結果,保持卡爾曼濾波器中的參數保持不變,通過仿真調節滑模控制器中的參數,則當滑模控制器中的參數如下時,結果較為理想。

通過Matlab軟件得到時間-位移曲線,如圖3所示。
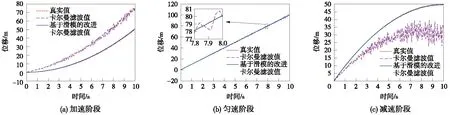
圖3 基于滑模的改進卡爾曼濾波時間-位移曲線對比
從圖2和圖3可以看出:
在加速階段中,對于卡爾曼濾波來說,由于空轉的影響使得其位移值遠遠大于真實值,其累計誤差比真實值多出40.028%;而對于基于滑模的改進卡爾曼濾波值來說,其累計誤差比真實值高4.324%。雖然還是存在一定的誤差,但已經大大減小。
在列車勻速運行階段,雖然卡爾曼濾波能夠很好地降低系統誤差,但基于滑模的改進卡爾曼濾波誤差也要優于卡爾曼濾波的誤差值。
在減速階段與加速階段類似,只是過程誤差中的空轉變成了打滑。
6 對比分析
目前,利用多傳感器進行信息融合的方法是一種普遍采用的能夠有效提高列車測速定位的方法。本文選取文獻[7-9]的算法進行對比。
文獻[7]采用了改進聯合卡爾曼濾波,通過自適應算法,將測得的信息進行比例分配,對每個信息都要進行一次濾波,然后通過分配信息比例進行最后的濾波。該算法適應能力強,但對整個系統的結構要求很高。
文獻[8]提出了采用小波神經網絡輔助卡爾曼濾波,采用均方差作為研究變量,最終結果顯示其均方差由改進前的0.15降低到改進后的0.01。雖然精確度很高,但是該結構復雜,數據龐大。
文獻[9]采用了擴展卡爾曼濾波進行定位,首先通過擴展卡爾曼濾波對觀測方程進行線性優化,結合盲區數據進行分析,從結論可以看出,在不發生大的偏移時,仿真結果較好。但并不適用于本文所述情況。
本文主要是針對輪軸傳感器空轉打滑產生的誤差,這種情況屬于較大的偏移量,采用基于滑模控制的卡爾曼濾波方法的矯正精度要優于采用擴展卡爾曼濾波的方法,更加具有適用性。從結構上來看,較之改進聯合卡爾曼濾波和小波神經網絡輔助卡爾曼濾波,基于滑模控制的卡爾曼濾波方法結構更為簡單,易于理解與實現,在應用上能節約成本,同時定位精度也能得到一定的保證。
7 結語
主要針對目前輪軸測速傳感器與加速度計組合定位下存在定位誤差的問題進行分析。在卡爾曼濾波對空轉打滑矯正效果不理想的情況下,利用滑模控制器的滑動模態與系統的參數及擾動無關的特點,提出基于滑模控制的卡爾曼濾波算法。該算法結構較之其他改進卡爾曼算法結構更為簡單,通過仿真結果也可以看到:基于滑模控制的改進卡爾曼濾波方法能夠在卡爾曼濾波算法的前提下進一步減小空轉打滑誤差,提高濾波結果的穩定性,同時也提高了列車定位精度。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36