關于高壓線路巡線機器人的研究設計
2019-04-22 07:29:16周柱昌
裝備制造技術 2019年1期
關鍵詞:機械
朱 巖,周柱昌,高 峰
(廣西玉柴機器股份有限公司,廣西 玉林537005)
0 前言
電力系統最重要的任務是提供高質量和高可靠性的電力。電力傳輸必須依靠高壓輸電線路,它的安全穩定運行直接影響著電力系統的可靠性[1]。然而高壓輸電線路分布復雜,范圍廣闊,且暴露在野外,環境多變性大,日日夜夜的都要遭受風吹日曬,高壓線路表面的材料容易氧化、老化以及磨損,而且無論南北方都會出現雨雪天氣,特別是南方的凍雨,在落下的時候是雨滴,落到高壓線上的時候就變成了冰塊掛在高壓線上,這更是大大增加了高壓線路的負擔。因此,必須定期檢查傳輸線,而高壓線巡線機器人也就成為了一種保障高壓線路安全的重要手段。
1 高壓線路巡線機器人國內外研究現狀
巡線機器人研究始于80年代末,1988年到1990年屬于萌芽期,1990年到1995年為起步期,1996年到2010年為發展期,2011年至今已發展成熟,成為特種機器人的研究熱點。
對于高壓線路巡線機器人的研究,國外已經開始進入實用階段,而且已經可以實現很大程度的人工智能,所需花費的人力資源已經大大減少,國內雖然還不能正式投入實用,但是也都在很多領域實現了突破,并且國內也對能夠實現自助越障功能的機器人的研究進行了大量的投入,取得了多項顯著的研究成果。
2 主要研究內容
目前在國內高壓輸電線路的巡檢、維護主要有兩種方法:一種是人工檢查,其缺陷有人工勞動強度大、工作效率低、可靠性差、存在檢查的盲區;另一種是用直升機巡檢,具有檢測效率高和精度好特點,但也受一些環境因素的制約,同時不僅增加了巡檢的技術難度,還將大大增加巡檢的費用。所以急需一種可以替代之的工作方式。移動機器人技術的發展為高壓輸電線的檢查工作提供了新的手段。
3 高壓線路巡線機器人工作環境分析
由于巡線機器人工作的環境為室外高空曠野,自然環境例如烈日、大雨、狂風、暴雪等自然惡劣環境也有可能成為其工作環境,所以巡線機器人必須要能夠克服這些環境才能進一步的進行其他的工作,因此要求巡線機器人必須要防水且不怕暴曬,且能保證高空中的穩定性,隨時根據外界環境調整不同的狀態加以應付。
其次,巡線機器人工作過程中需要經過導線、絕緣子以及懸掛線夾等不同的障礙物,這就要求其能根據障礙物的不同,做出不同的越障動作功能,而這僅是在高壓線路上的時候的動作,在每兩條高壓線路之間還有一座鐵塔連接著這兩條高壓線路。
4 巡線機器人總體設計
因為巡線機器人屬于高空作業,考慮到機構穩定性,采取了雙線并聯四輪四臂行進式機器人。機器人關于中間絲杠相對稱,并且相隔的兩個滾輪位于同一條線上。其中兩個電機分別與一號和三號滾輪相連,負責帶動巡線機器人在高壓線路上平緩前進;剩下的一個電機則與絲杠通過聯軸器連接在一起,帶動絲杠轉動以改變絲杠上絲母的上下位置,進而決定滾輪是離開高壓線路還是壓緊高壓線路,從而實現不同的越障階段。為了增加機器人的穩定性,在絲杠四周增加了一個不影響機械臂轉動的框。為了減少機構的運動副,設計的兩邊的機械臂采用了加長臂的方法。四個滾輪則統一加上了輪子蓋以便與機械臂連在一起,中間的兩個機械臂直接焊接在中間連接板上的方法,以使巡線機器人的整體受力能更趨于均勻。
其總裝配圖如圖1所示。
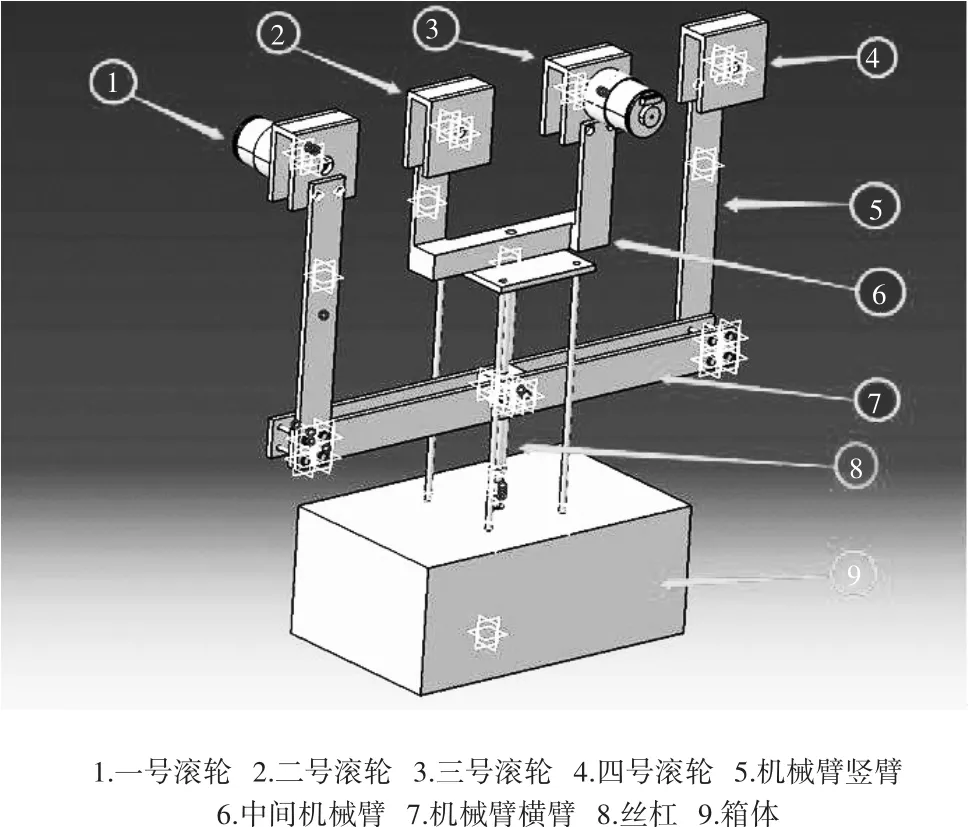
圖1 巡線機器人總裝配圖
5 巡線機器人運動可行性分析
機器人的運動范圍為機械臂在空間或平面內可到達的區域范圍,由于跨越某些障礙時對運動范圍有所限制,所以機械臂的上下運動幅度為300 mm,且只有與Z軸平行的一個自由度,在達到運動極點的時候,電機將進行空轉,即機械臂與絲杠將會實現同步移動,從而不會發生位置的偏置,這樣也從側面實現了對巡線機器人的過運行的線路保護。根據實體與模型1∶5的比例,鐵塔最小的三角結構最小容納直徑為3 m的運動范圍,巡線機器人完全可以從容的越過障礙,所以,設計的機器人大小是合理的。
6 巡線機器人越障過程
在翻越懸垂線夾一類需要用到舵機的障礙物時,要做到機械臂的位置改變。詳細越障過程如下所述:
首先,絲杠電機正轉,一號、四號機械臂上升一定高度,舵機正向轉動90°,如圖2所示。
然后,滾輪電機正轉,帶動巡線機器人向前移動,一號機械臂越過懸垂線夾后滾輪電機停止,舵機反向轉動90°,絲杠電機反轉,一號和四號機械臂回到高壓線上,如圖3所示。

圖3 一號滾輪越過障礙物
緊接著,絲杠電機反轉,二號和三號機械臂離開高壓線上升到一定高度,舵機正轉90°,機械臂偏移,滾輪電機開始正轉,帶動機器人繼續向前運動,如圖4所示。

圖4 二號、三號滾輪開始越障
二號和三號機械臂越過障礙物后舵機反向轉動90°,使二號、三號機械臂回到原來位置,然后絲杠電機正轉,二號、三號滾輪回到高壓線上,如圖5所示。
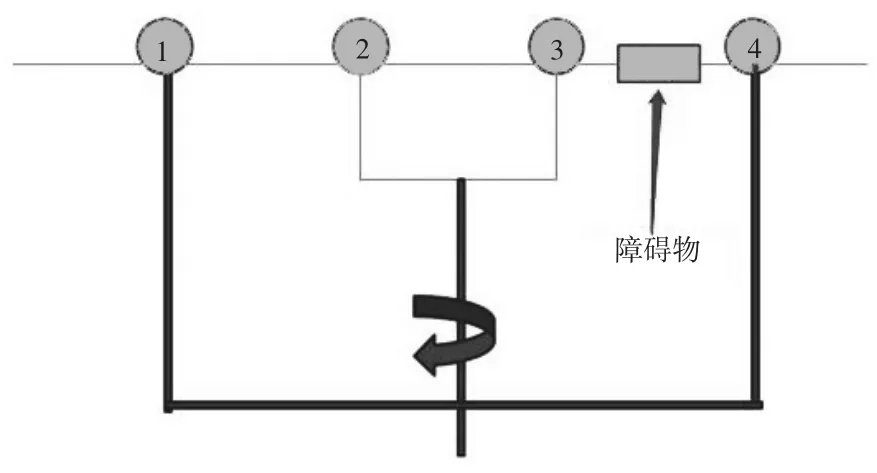
圖5 二號三號滾輪越過障礙物
最后,絲杠電機持續正轉,一號和四號滾輪再次離開高壓線,上升到一定高度,舵機轉動90°,機械臂再次偏移,然后滾輪電機轉動,在四號滾輪越過障礙物后停止,如圖6所示。
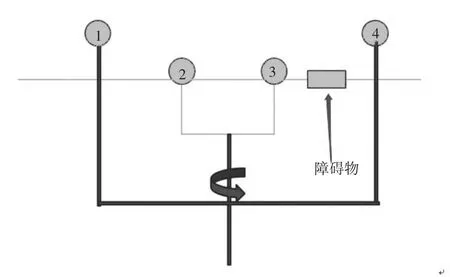
圖6 四號滾輪開始越障
舵機反向轉動90°,絲杠電機反轉,一號和四號機械臂回到高壓線上,如圖7所示,越障動作完成。
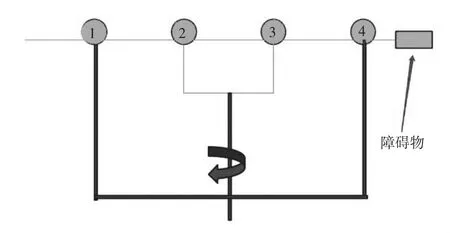
圖7 四號滾輪越障結束
7 巡線機器人程序仿真
因為裝配的時候必然存在誤差,所以,為了最真實的還原零誤差時機器人的運行狀態,通過protues仿真軟件進行了巡線機器人的運動仿真(見圖8)。仿真圖中,共使用了四個arduino模塊以及三個放大器模塊,其中一個arduino模塊控制另外三個arduino模塊,這三個模塊連接三個放大器輸出放大的功率給直流電機,直流電機的運行情況通過連接在電機兩側的電壓表顯示。
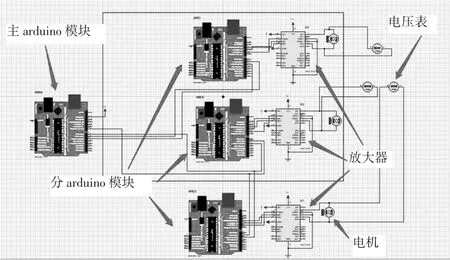
圖8 巡線機器人protues仿真
8 結論
本次研究設計中,由于一切都只是理論基礎,所以我們設計了一個實驗模型以驗證結論,但是在實驗時發現,實驗巡線機器人的絲杠由于滑塊需要上下滑動,所以需要裸露在空氣中,一段時間之后會與空氣發生氧化,從而影響巡線機器人的使用壽命,目前還沒有比較好的解決方法,歡迎廣大研究學者在此基礎上繼續改進、深入研究。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09