基于模糊綜合評判的在線圖像分割
2019-04-18 03:19:12林堅普王衛星郭太良姚劍敏林志賢白莉娜
有色金屬(礦山部分) 2019年2期
林堅普,王衛星,2,嚴 群,郭太良,姚劍敏,林志賢,白莉娜
(1.福州大學 物理與信息工程學院,福州 350108;2.瑞典皇家工學院,斯德哥爾摩SE-10044)
經過爆破或者自然崩落法采集的礦巖塊,其尺寸和形狀的分布是評價生產質量的重要指標。傳統的測量方式主要是人工測量和統計,最常用的方法是制作不同尺寸的篩子進行塊度的篩分。但在骨料(礦巖塊度)生產中,由于礦巖塊度的堅硬程度和設備材質,以及設備磨損等因素的影響,導致篩分測量效率不夠高,而且設備的投入成本較大,效益低。所以,研究一種方法快速準確地獲取礦巖塊的形狀及尺寸參數信息對提高生產效率及生產自動化程度有實際意義。自20世紀末開始,隨著數字圖像處理和分析技術的快速發展,人們開始將圖像處理技術應用于礦巖塊度的測量與分析及在線檢測/監測系統中[1-6]。在20世紀90年代也曾研發過礦巖塊度測量和分析系統[1]:一種是人機交互的測量分析系統;另一種是在線檢測系統。近幾年來,這方面的研究越來越多[2-6],但熱點之一仍然是運輸帶上礦巖塊度的精確提取問題。為了避免塊度重疊及表面紋理和三維信息給從運輸帶上獲取的圖像分割帶來的困難,本文的檢測系統在傳送帶末端利用CCD視頻相機,以天空為背景,獲取空中降落的礦巖塊度圖像并進行實時在線處理(見圖1)。該方法能夠獲取清晰的礦巖塊度在空中的投影并可對圖像進行實時的全天候測量和分析,并對生產質量做出評價及自動控制。

圖1 礦巖塊度在運輸帶上及降落流中的情況對比Fig.1 Comparison of rock fragments on a conveyor belt and in a falling stream
為了滿足在線檢測系統的實時性要求,閾值分割算法是圖像分割的一個較好的選擇。基于灰度的閾值分割主要是根據圖像中的灰度差異,將圖像分割為目標和背景兩類。傳統的全局閾值分割算法針對目標和背景亮度對比度較大的圖像有較好的分割效果,但是對于本文的礦巖塊度圖像,由于天氣及灰塵等變化原因,圖像中會存在礦巖塊度的陰影及噪聲,此外還存在一些的塊度粘連現象,以至于用全局閾值算法無法完全將礦巖塊度檢測出來。為了克服這一弊病及減少算法的運算量,我們研究了一種基于模糊綜合評判的自適應動態閾值分割算法,該算法先對圖像進行全局閾值分割,提取各巖塊區域參數信息并進行模糊綜合評判,根據判決結果對需要的塊度區域或異常尺寸及形狀的區域,再利用閾值分割算法求取新的局部閾值,重復這一操作,直到每一塊度無可再分為止。算法簡單,運算快,可達到精度要求,算法流程如圖2所示。
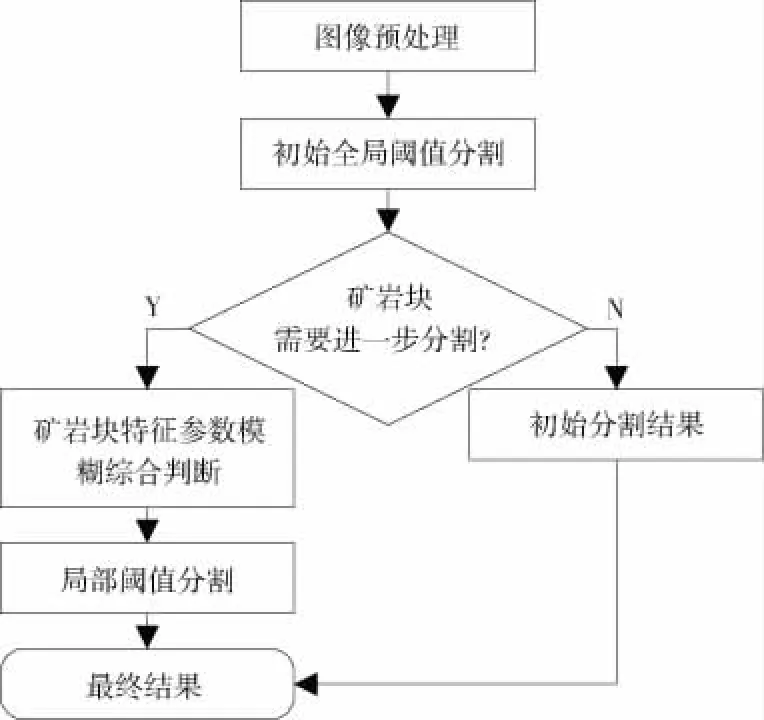
圖2 礦巖塊度圖像模糊自適應閾值分割算法流程Fig.2 Working flowchart of adaptive fuzzy thresholding algorithm for rock fragment images
1 圖像預處理和初始分割
1.1 圖像的預處理
監測系統采集的圖像是彩色圖像,先要對圖像進行灰度化處理,以便后續處理。本文圖像背景多為藍色,而紅色成分較弱,故加大藍色的權值,減少紅色的權值,根據彩色圖像的RGB值,轉換為灰度圖像的灰度值公式如下,即灰度值X為:
X=0.11R+0.59G+0.3B
在采集圖像的過程中,圖像不可避免地受到各種因素的干擾,致使圖像中存在一些噪聲。由于光線不均,圖像中還存在不清晰問題。這些問題會給后續工作帶來困難,較好的圖像預處理可以降低這些因素的影響。因此,圖像的預處理主要是對圖像進行平滑濾波處理。這里采用中值濾波方法來去除或減少那些噪聲及保持似粘連部分的弱邊界。初始處理后的結果如圖3所示。
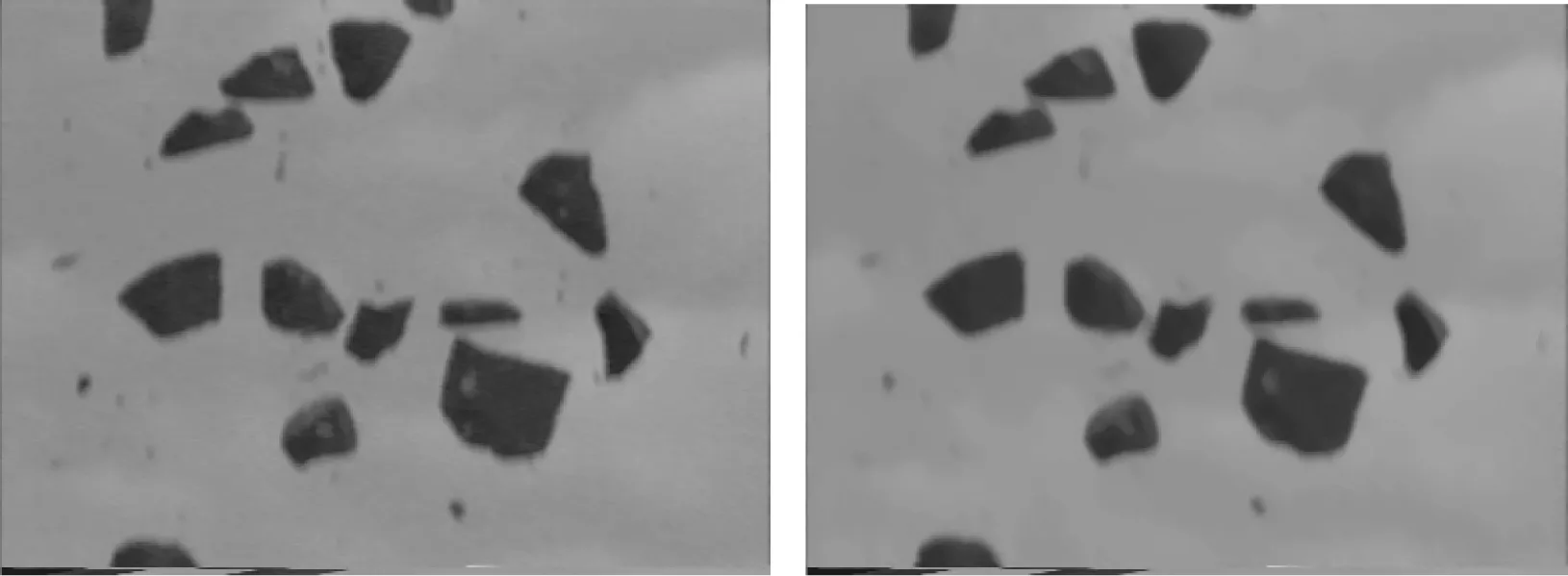
圖3 原始圖像及其預處理圖像Fig.3 Original image and its preprocessed result
1.2 圖像初始分割
初始分割利用經典閾值分割算法對圖像進行全局分割,全局分割是指對整幅圖像進行閾值分割。這樣的算法很多,為了選取合適的算法,本文選取應用較為廣泛的閾值分割算法,如:最大類間方差法(Otsu法)、最大熵法、矩保持法、迭代法。這些算法的基本思路是:對圖像的像素灰度值運算,確定一個灰度閾值T(0≤T≤255),根據閾值T將整幅圖像分成兩個區域:目標區域和背景區域。在目標區域中,所有的像素點的灰度值小于這個閾值,故在二值圖像里,目標區域像素點的值設為0;而背景區域的像素點的灰度值小于這個閾值,在二值圖像里將背景區域的像素點值定為255。閾值運算后得到二值化的圖像可用如下公式所示:
(1)
閾值分割算法的結果很大程度上依賴于對閾值的選取,因此閾值分割算法最重要的就是選取合適的閾值,這也是圖像分割算法的關鍵,下面簡單介紹幾種經典的閾值分割算法。
最大類間方差法(Otsu法)又稱大津法[7],是日本學者大津展之在1979年提出的一種全局閾值分割算法。其基本思想是假設閾值將圖像分為目標區域和背景區域,然后分別計算這兩個不同區域中的像素點個數和平均灰度值,再求目標和背景區域之間的類間方差,最后求解使得類間方差最大且類內方差最小的對應灰度值T作為閾值。矩保持法是Tsai于1985年提出的[8]基于圖像矩的多閾值分割算法,其原理是在閾值分割運算前后,保持圖像的矩不變。最大熵法的作者Kapur[9]認為圖像中的目標物體和背景區域是兩種不同的信號源,當這兩類區域的熵之和為最大值時,那個對應的灰度值也就是要求解的閾值。由熵的定義可知,如果圖像中灰度值差異小,則熵大,所以如果選取的閾值合適,圖像被分割后的結果中,各區域內灰度值的差異較小,信息量大,即熵最大。所以,找到目標與背景區域熵最大時對應的灰度值即閾值。迭代法是先設定整幅圖像的一個閾值,將該初始閾值分割后得到的區域分別看作子圖像,然后利用子圖像再計算全局閾值,重復上述過程,直到所求得的閾值與前次閾值相等時,將此時的閾值作為最終的閾值。圖5及表1數據是幾種閾值算法的例子。
對圖像取全局閾值時,目標區域和背景區域的差異反映在圖像的直方圖中就是在兩個較大的波峰中有相對明顯的波谷,求圖像的全局閾值就是要找到這個波谷。采集到的礦巖塊圖像直方圖多為波谷較明顯的圖像(圖4),利用上述算法得到的閾值,都基本上落在直方圖的波谷區,但最好算法的選取還要根據圖像分割結果來說明(圖5和表1)。
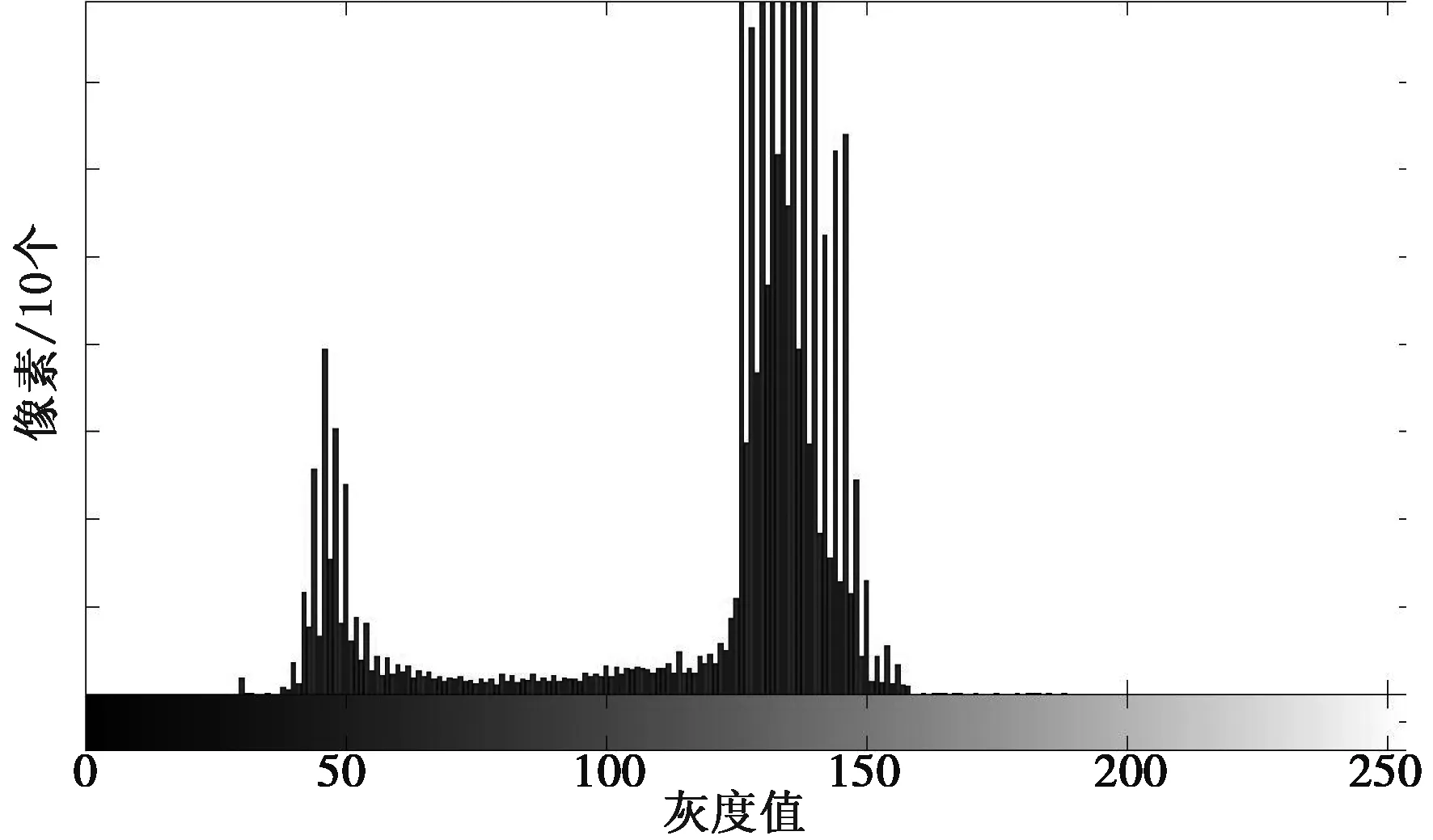
圖4 圖像直方圖Fig.4 Image histogram
當圖像被預處理后,我們先利用全局閾值算法對圖像進行初始分割。經過對比多幅巖石塊度圖像(圖像序號0~300)的初始分割結果,并統計全局閾值算法的閾值,我們得到:在表1中,大津法和迭代法要相對好一些,剩余的另兩種方法所得到的全局閾值過大,致使粘連的巖石塊度較多,給進一步分割造成困難。而進一步的試驗說明:迭代法閾值算法的結果與初始閾值選取有關,初始閾值的設置有時可導致整幅圖像全黑或全白。對比結果說明無論從速度還是從穩定性來說,大津法閾值算法都是最佳的閾值算法選擇。所以,我們在初始閾值分割和進一步閾值分割時,都選取大津法作為基礎算法。再進一步的分割就是要分離粘連在一起的巖石塊度。
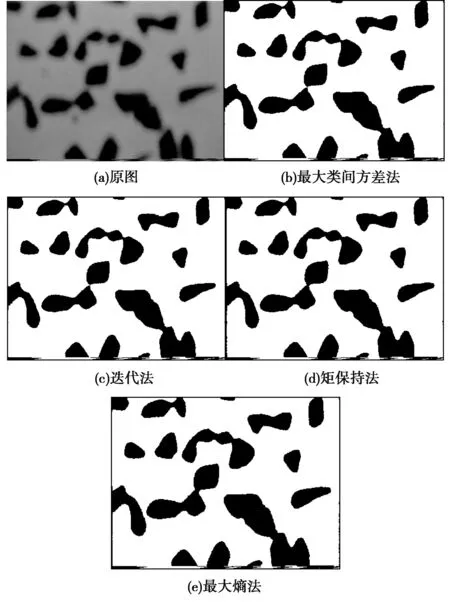
圖5 不同的閾值分割算法分割結果 Fig.5 Results of threshold algorithms:(a) Original image;(b) Otsu result; (c) Iteration result;(d) Moment-preserving result;(e) Max entropy result
2 基于模糊評判的圖像分割
初始全局閾值算法分割后的圖像為二值圖像,在此基礎上,根據礦巖塊度的不同特征進一步分割。全局閾值分割是直接利用整幅圖像的灰度差異特性區分出目標和背景。但對于細節的地方,效果不一定很好。在未分離的礦巖塊度之間有陰影,及微弱灰度差異的共有區域,利用全局閾值無法分割,所以針對礦巖塊度之間有粘連現象的情況,利用粘連礦巖塊度的多種特征作為判斷準則,作進一步圖像分割。
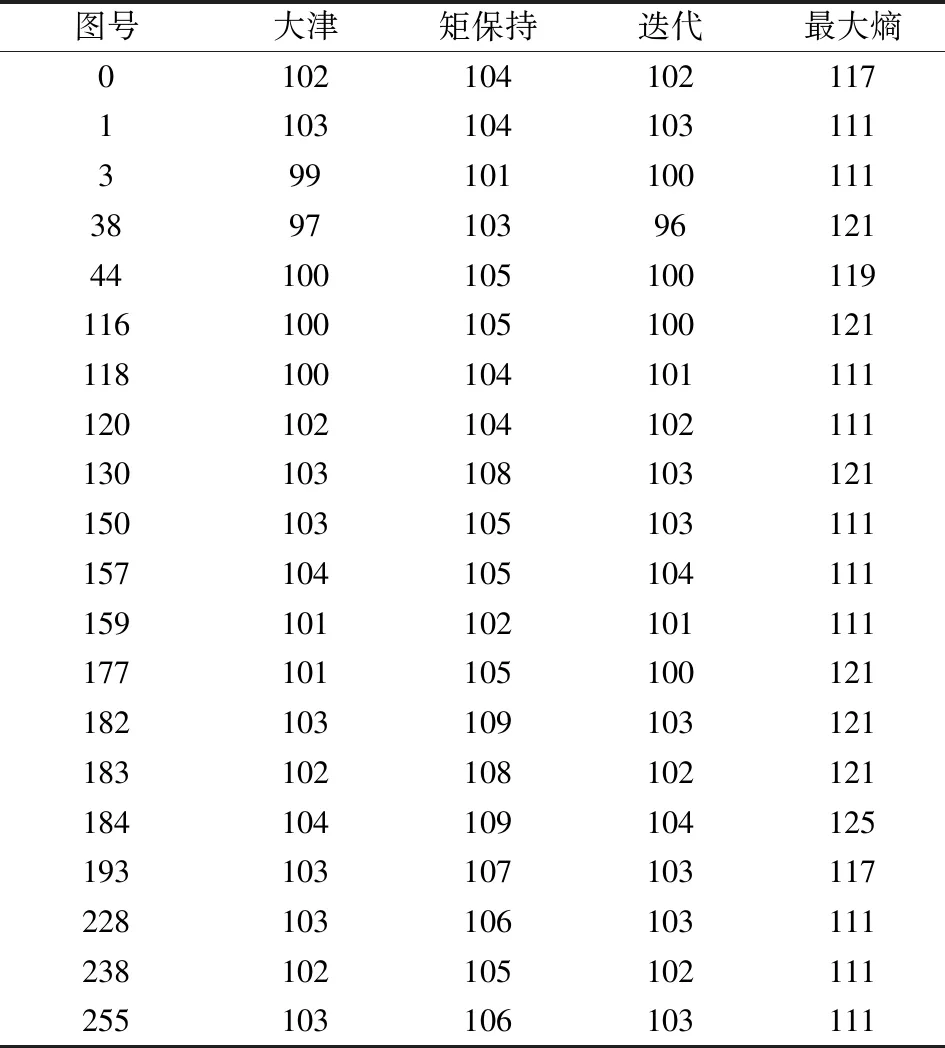
表1 幾種閾值分割算法全局閾值數據結果
2.1 區域特征參數定義
利用尺寸和形狀特征,可以較為簡捷地分離粘連的礦巖塊度[10-13]。礦巖塊度一般為不規則的多邊形凸包域,對于目標區域的尺寸和形狀描述主要有以下幾種:
1)目標的面積計算
從初始分割后的圖像中可以看出,粘連在一起的目標物體最顯著的特征就是面積太大。面積的計算非常簡單,求出區域邊界及邊界內像素點的總和即可[14-15]。
2)目標的周長計算
目標的周長在區別具有簡單或復雜形狀物體時非常重要。由于數字化的周長的表示方法不同,所以計算方法也不同,為簡便起見,我們用目標物體邊界上的像素之和來表示周長。
3)區域的形狀因子
這里的形狀因子是用來描繪一個區域與圓形接近的程度,圓形的形狀因子為1,區域的形狀與圓形的差別越大,其形狀參數與1的差值也就越大[16-17]。其定義如下:
(2)
式中:L—區域周長,S—區域面積。
4)區域內部梯度
圖像目標區域邊界上的像素點,在對應的灰度圖像中,其鄰域是灰度值的變化帶。梯度可以有效地衡量灰度值的變化。圖像在任意點的微分值大小可以表示灰度的變化率大小,因而我們用一階微分的值來定義梯度,若圖像為f(x,y),在某點(x,y)處的梯度值可定義如下:
(3)
常用差分來近似微分,典型的梯度差分算法,表示為:
(4)
5)區域內部的平滑度
圖像的平滑度是圖像的平滑特征之一,我們用圖像區域的灰度方差來表示圖像的平滑度。其定義如下:
(5)
2.2 礦巖塊度參數模糊綜合評判
若將巖塊的參數信息作為進一步閾值分割的依據時,有多個因素需要考慮。如果只單獨考慮某個因素,無法得到較為準確的判斷。而且每一個目標區域是否需要作進一步分割,多半都是模糊的,為此,可以采用模糊數學中的模糊綜合判斷方法來進行判斷,結合圖像特性的幾個主要因素來對每一目標區域進行判斷。模糊綜合評判的思想是利用模糊線性變換原理和最大隸屬度原則來考慮與被評價事物相關的各種因素,從而對其做出較為合理的綜合評價[18]。
模糊綜合評判的主要三要素為:
1)確定因素集:U={u1,u2,…,um}
2)設計評語集:V={v1,v2,…,vn}
3)顧名思義,單因素判斷就是對單個因素ui(i=1,2,…,m)的評判,得到V上的F集(ri1,ri2,…,rin),所以它是從U到V的一個F映射,F映射f可以確定一個F關系R∈μm×n,R為評判矩陣。
(6)
各評判因素相對評判結果有不同決定性,需要對各因素做加權處理。用A=(a1,a2,…,am)表示各因素的權重分配。權重集與評判矩陣合成得到綜合評價集B(b1,b2,…,bn),模糊綜合評價集是針對各因素的綜合評判的結果,最后根據模糊數學中的最大隸屬度原則,選取模糊綜合評價集中最大的評語作為評價的結果。
由巖石塊度參數組成的因素集是整個模糊綜合評判的基礎,其關系到評判結果的真實性和可靠性。選擇的因素應能全面地反映巖石塊度基于灰度及形狀的特征。故此我們選取分割后的目標區域的面積、周長、形狀、梯度和平滑度為因素集成員。模糊綜合評判的結果(即評語集)由需進一步分割和不需進一步分割組成。每個因素權重值的確定方法很多,一般的方法有統計法和層次分析法等。其中,統計法需要請多位行業專家對因素集中的各個元素給出認為最合適的權重,然后再進行統計分析。而評判矩陣的確定則需要知道各個因素單獨對評價的影響,這個評判矩陣由每個因素的隸屬度構成,而隸屬度的確定是很關鍵的步驟,要能夠穩定地表示每個因素屬于每個評價的頻率。通常隸屬函數的確定方法有許多,如推理法、模糊統計方法、三分法、二元對比排序法等。模糊統計方法要進行大量的統計實驗,然后用邏輯推理的結果來確定。例如:若確定論域U上固定的元u0是否屬于論域上的一個模糊集合A*的隸屬度,那么u0是固定的,A*是動態的集。通過做n次模糊統計實驗,就可以確定隸屬度:
隨著n的增大,隸屬頻率呈現穩定性,穩定的頻率就是u0對A的隸屬度。通過模糊統計大量的礦巖塊度圖像,由觀察統計圖像上礦巖塊度的粘連狀況得到每一區域各個因素對評價集的隸屬度,再通過曲線擬合,得到隸屬函數。經過統計,各個因素穩定在某一個隸屬值,由這些隸屬值所組成的隸屬函數分別為(該擬合函數圖如圖6):
面積的隸屬函數:(見圖6)
F(x)=0.008131x9-0.03741x8-
0.001882x7+0.2197x6-0.2257x5-
0.303x4+0.5725x3-0.227x2-
0.01311x+1.008
擬合的結果質量評價參數:
SSE: 0.75,R-square: 0.982 3
周長的隸屬函數(見圖5):
F(x) = 0.007753x9-0.03216x8+
0.2362x7-0.1396x6-0.4537x5+
0.5318x4-0.04068x3-0.09318x+ 1.01
擬合結果的質量評價參數:
SSE: 2.007,R-square: 0.936 1
形狀因子的隸屬函數(見圖5):
F(x)=0.006222x+0.4685(x<50)
F(x)= -0.02712x4+0.1385x3-
0.1587x2-0.1711x+
0.7113 (50≤x≤275)
F(x)= 39.63x9-91.06x8-77.39x7+
193.1x6+88.61x5-111.6x4-
48356x3+12.94x2+6.111x+
0.8071(x>275)
擬合結果的質量評價參數:
SSE: 7.29, R-square: 0.4807
梯度的隸屬函數(見圖5):
F(x)=0.3408x+0.2591 (x<30)
F(x) =0.02721x9-0.1422x8+0.1277x7+
0.398x6-0.65481x5-0.1142x4+
0.4862x3-0.07631x2-0.06878x+
0.1478 (30≤x≤208)
F(x)= 0.1546x4-0.2838x3-0.2729x2
+0.7091x+0.7214 (x>208)
擬合結果的質量評價參數:
SSE: 0.666 5,R-square: 0.875 6
平滑度的隸屬函數(見圖6):
F(x)=0.3532x+0.337(x<68)
F(x) =0.1113x4-0.05123x3-
0.4865x2-0.1153x+
0.6175 (68≤x≤200)
F(x)= 0.1238x2-0.07593x+0.2963
(x>200)
擬合結果的質量評價參數:
SSE: 1.145,R-square: 0.8072
當擬合函數時,原始的數據先經歸一化,再經中心化,其中心化方式為:
(7)
式中:x—原始的數據,mean—x均值,std—標準差。相應地,以上隸屬函數中的x均經過中心化和歸一化的數據。這里函數分段標準則是按歸一化后的數據進行的。擬合的數值與實驗的數據存在一定誤差,衡量擬合結果質量優劣之評價參數是:
1)誤差平方之和SSE:The sum of squares due to error
2)確定系數:R-square
評價擬合曲線時,SSE越接近0,曲線的擬合效果越好,當R-square越接近1,曲線的擬合效果將越好。每條擬合曲線的質量參數都如圖所示,擬合效果均為較好(見圖6)。
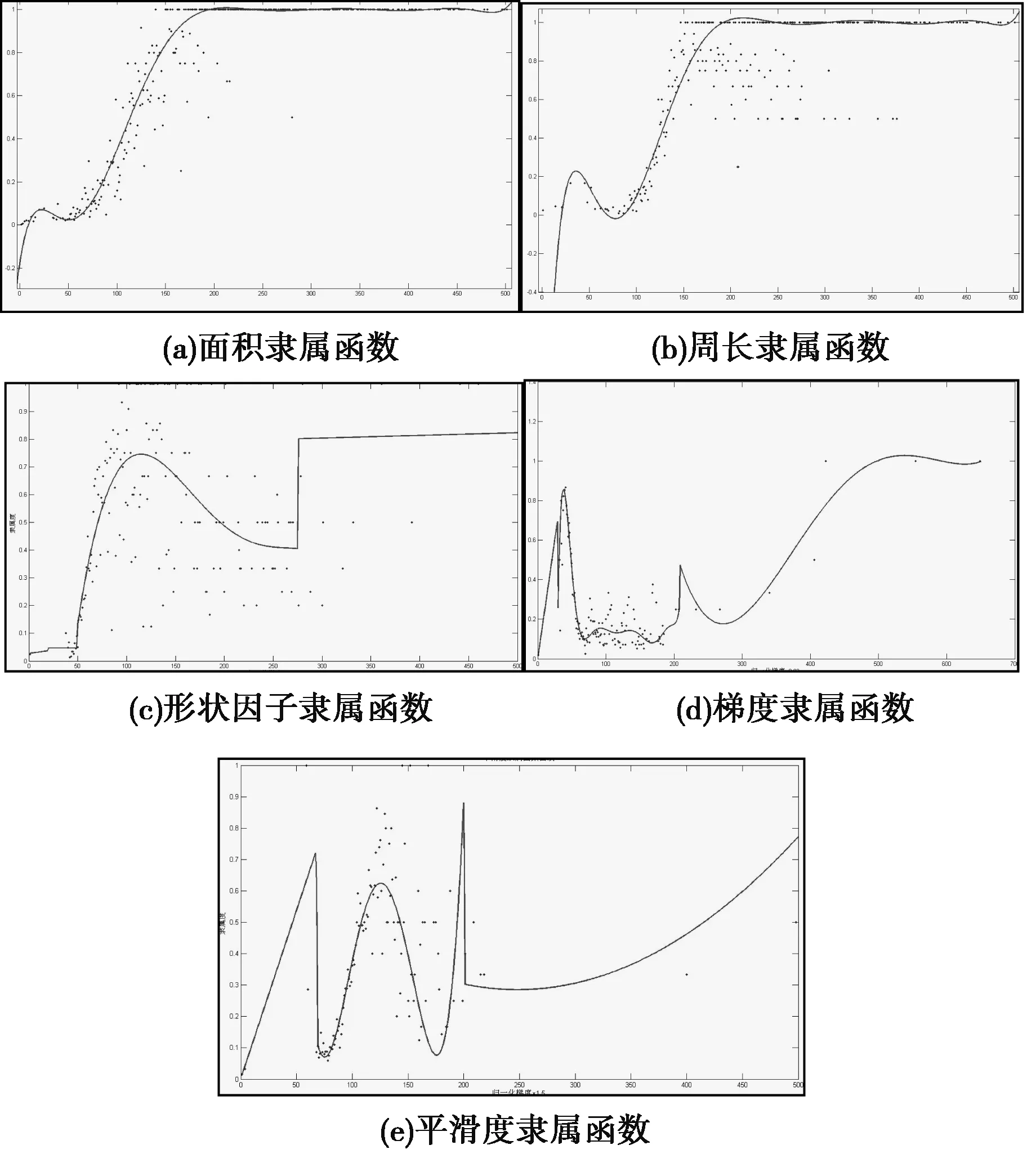
(a) Membership function of area(b) Membership function of perimeter (c) Membership function of shape factor (d) Membership function of gradient; and (e) Membership function of smoothness圖6 礦巖塊度區域特征的五種隸屬函數Fig.6 Five membership functions of rock blocks
對于每一個巖石塊度區域,當獲取其參數后,都可以由隸屬函數得到評價矩陣。然后再由評價矩陣和權重集來合成最終綜合評價集。權重集由統計分析方法得出:
A=(0.4,0.2,0.2,0.1,0.1)各因素對應分別是:面積、周長、形狀因子、梯度、平滑度。
3 試驗結果及與其它算法的比較
3.1 模糊綜合評判結果
針對初始分割后的圖像,在進行模糊綜合評判之前,首先要獲取參數信息。然后取多幅圖像進行分類分析,再利用標號和邊界跟蹤來獲取每一巖石塊度的面積、周長和形狀因子參數,最后計算初始處理后的灰度圖像中標號對應區域的梯度和平滑度參數,具體例子見圖5(b)和對應的表2。所得到的參數先分別對其歸一化和中心化處理后,然后再通過隸屬函數來計算每個單獨因素的隸屬度,最后組合為評價矩陣。評價矩陣與權重集相乘后得最終評價集。
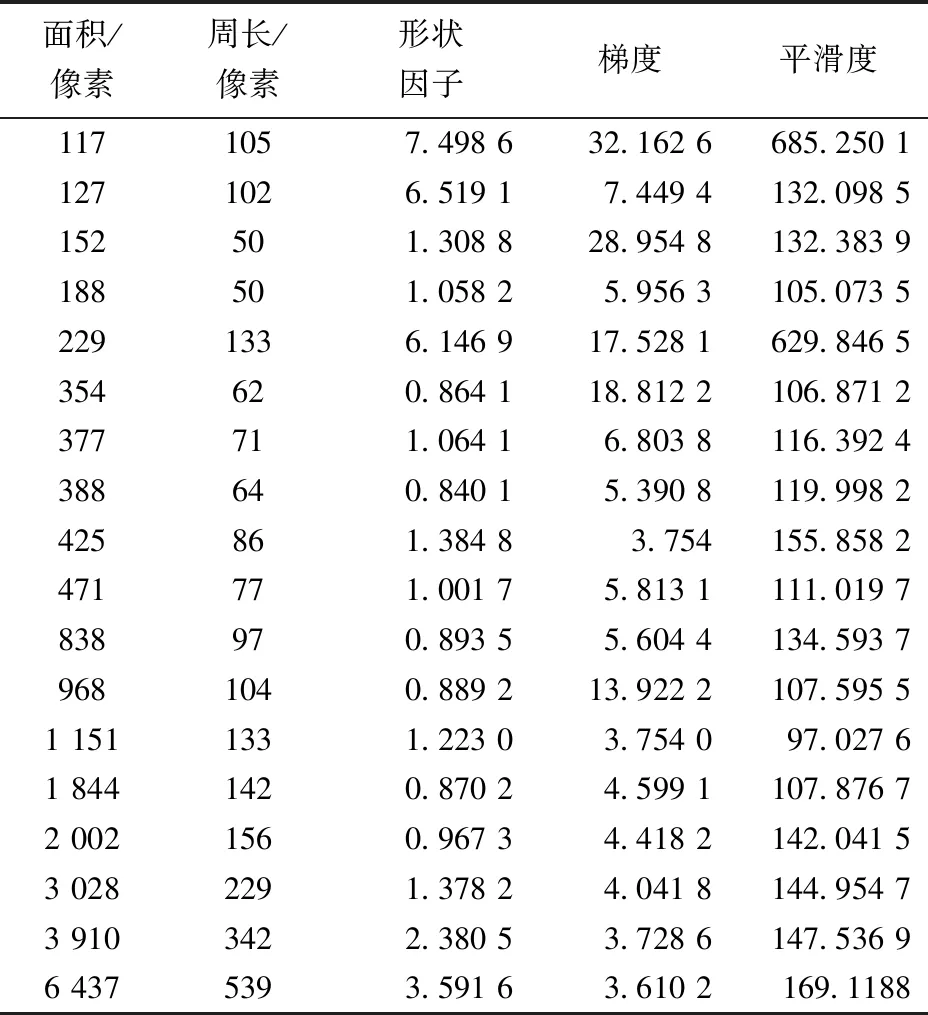
表2 最大類間方差法礦巖塊度參數
以表2中兩組礦巖塊參數為例,做模糊綜合評判。具體步驟如下:
1)因素集
(第一組數據)
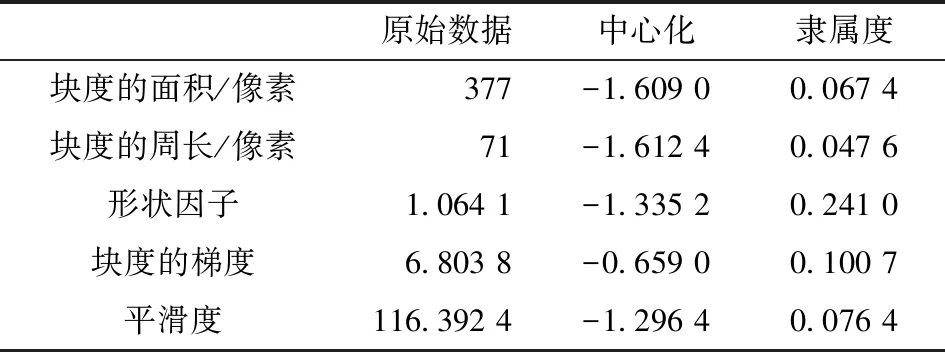
原始數據中心化隸屬度塊度的面積/像素377-1.609 00.067 4塊度的周長/像素71-1.612 40.047 6形狀因子1.064 1-1.335 20.241 0塊度的梯度6.803 8-0.659 00.100 7平滑度116.392 4-1.296 40.076 4
(第二組數據)
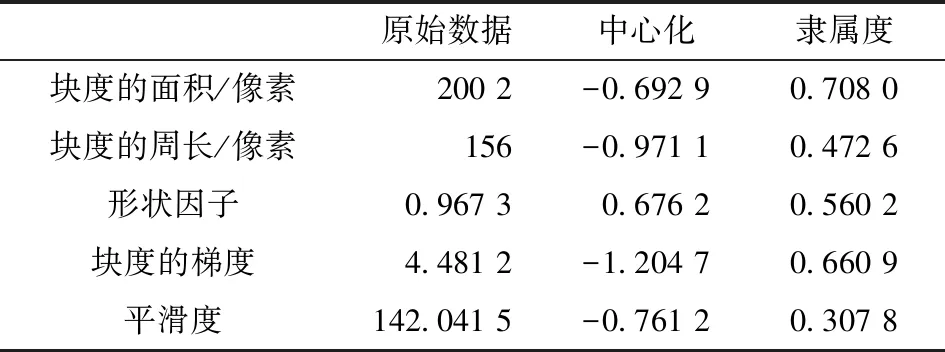
原始數據中心化隸屬度塊度的面積/像素200 2-0.692 9 0.708 0塊度的周長/像素156-0.971 1 0.472 6形狀因子0.967 30.676 2 0.560 2塊度的梯度4.481 2-1.204 7 0.660 9平滑度142.041 5-0.761 2 0.307 8
2)評價矩陣
3)權重集
A=(0.4,0.2,0.2,0.1,0.1)
4)綜合評價集:
B1=A*R1=(0.095 6 0.804 4);
B2=A*R2=(0.586 6 0.413 4)
根據最大隸屬度原則,判定區域1不需要進一步分割。區域2需要進一步分割。
3.2 最終分割結果及與其它算法的比較
實驗選取多幅圖像進行,算法總體運行速度是復雜分割算法[1,13,15,19]的20倍以上(0.04秒/幅)。圖7比較了人工篩選法、初始分割和自適應分割算法:相對于僅采用初始分割,自適應算法的分割結果與人工篩選的結果更為接近,更能精確地得到圖像的礦巖塊度,通過對100多幅礦石塊度圖像的實驗及分析,新算法的分割結果準確率約為95%。新算法在初始分割基礎上,對粘連的礦巖塊度自動進行分離,分割的例子如圖8所示。由圖8和表3可看出,初始分割中礦巖塊度之間的陰影部分(圖中箭頭所指出處)通過局部閾值分割,都分離開了,因此對陰影部分的分割效果較為顯著。對所得到的分割結果進行統計分析表明:新算法與人工篩選結果接近。從圖9中的5幅圖像分割結果看出,幾種最近研究熱點的圖像分割算法很難解決巖石塊度粘連的難題。圖9為新算法與其它兩種類似的圖像分割算法(聚類分析及圖論最小割)[20]的比較情況,這里有四幅典型的礦巖塊度圖像。第一、二、三和四列分別是原始圖像,聚類分析結果,圖論最小割分割結果及新算法的分割結果,聚類分析的結果及圖論最小割的結果,均以不同的顏色代表分割的塊度。
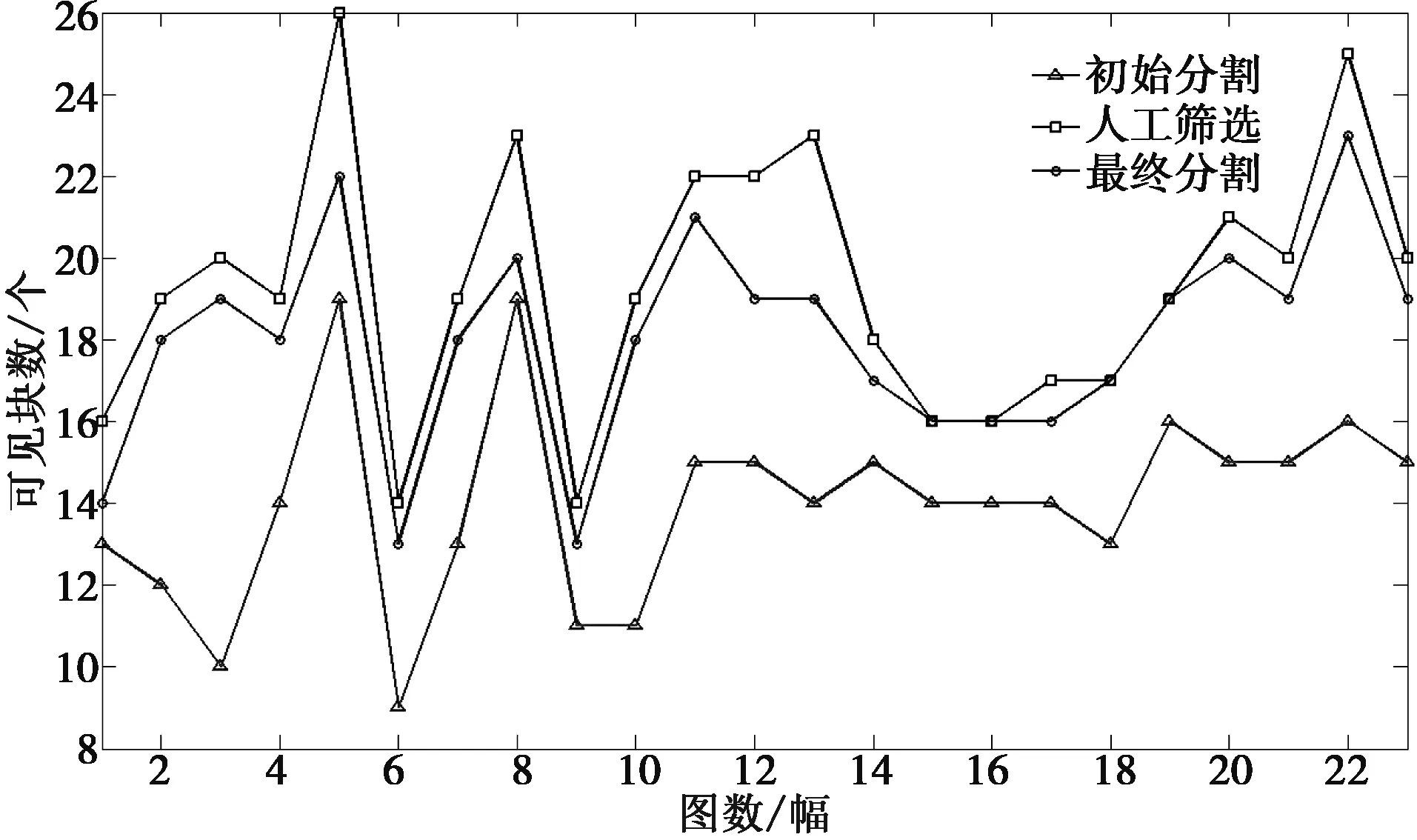
圖7 人工篩選、初始分割、最終分割結果效果比較(上線為人工篩選結果,中線為最終結果,底線為初始分割結果)Fig.7 Artificial screening, initial segmentation results and final segmentation results
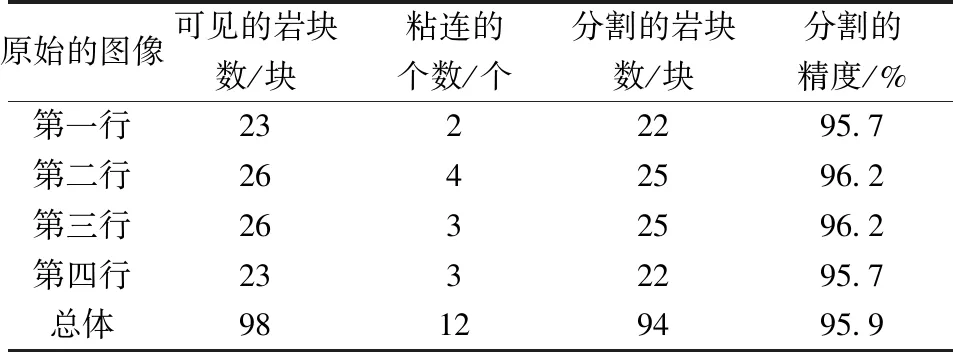
原始的圖像可見的巖塊數/塊粘連的個數/個分割的巖塊數/塊分割的精度/%第一行2322295.7第二行2642596.2第三行2632596.2第四行2332295.7總體98129495.9
從圖8~9中可以看出,聚類分析算法和圖論最小割分割算法不僅僅處理時間較長(約為新算法的10~20倍), 而又達不到實際工程所需要的圖像分割精度:對于該類礦石塊度圖像,除了粘連問題得不到解決外,而且還有欠分割的問題。
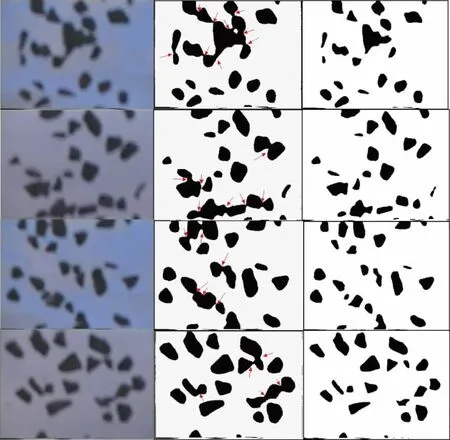
原始巖石塊度圖像 新算法的初分割結果 最終分割結果圖8 新算法的初始閾值分割結果與最終分割結果Fig.8 Initial image segmentation results and final segmentation results of new algorithm
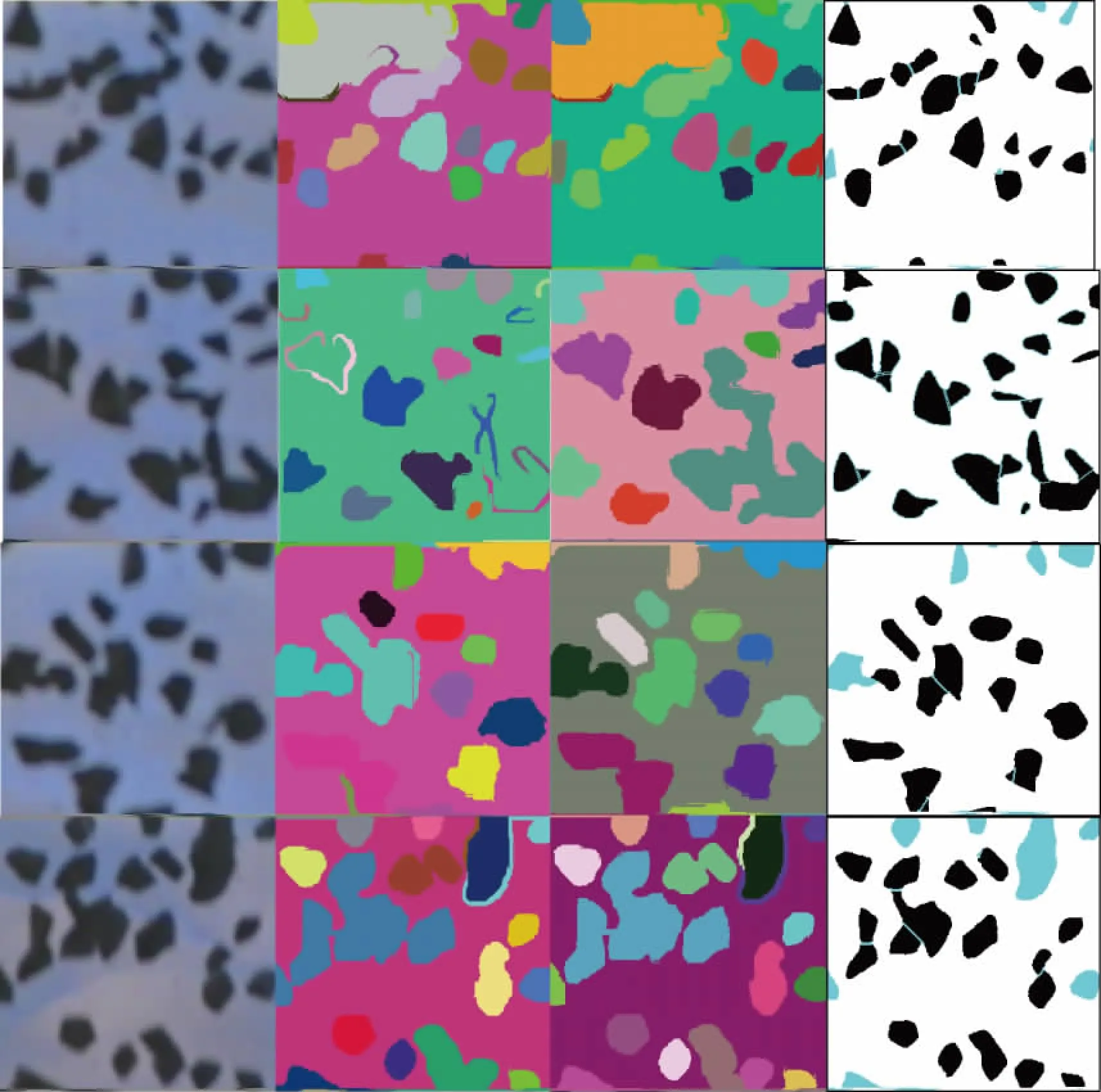
原始巖石塊度圖像 聚類分析分割結果 圖論最小割分割結果 新算法分割結果圖9 新算法和其它兩種算法的分割結果Fig.9 Image segmentation results by using new algorithm and other two existing algorithms
4 結論
圖像分割是礦巖塊度在線檢測系統中的關鍵技術,通常的全局閾值分割算法計算簡單,運算速度快,穩定性較好,但難以解決粘連塊體的問題。為了解決這一問題,本文研究了一種自適應式的閾值分割算法,該算法在對圖像初始處理的基礎上,應用Otsu全局閾值分割算法對圖像進行分割。然后基于二值圖像和灰度圖像信息,利用礦巖塊度特征參數根據模糊綜合判斷的結果對于未分割開的粘連巖塊再進一步分離。實驗結果顯示:對于應用其它熱點研究的三種圖像分割算法(聚類分析和圖論最小割),粘連的巖石塊度很難被分割,而新算法是基于簡單的Otsu全局閾值分割算法改進的,該方法圖像分割的結果較好:精度95%以上,速度為其它算法的20倍以上,可以應用在礦巖塊度的在線檢測系統中。進一步的研究工作是考慮如何將該算法擴展應用到其它類似的復雜多目標物體(如顆粒)圖像在線檢測/監測系統中去。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
石油瀝青(2021年4期)2021-10-14 08:50:44
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
民生周刊(2012年10期)2012-10-14 09:06:46
