基于轉(zhuǎn)向中心前后位置控制的多軸汽車操縱穩(wěn)定性研究
2019-04-18 07:55:38李運洪朱永強
汽車實用技術(shù) 2019年7期
李運洪,朱永強
?
基于轉(zhuǎn)向中心前后位置控制的多軸汽車操縱穩(wěn)定性研究
李運洪,朱永強
(青島理工大學(xué)機械與汽車工程學(xué)院,山東 青島 266520)
為解決多軸汽車高速行駛轉(zhuǎn)向操縱穩(wěn)定性差的問題,建立了五軸全輪轉(zhuǎn)向汽車的ADAMS-Simulink聯(lián)合仿真平臺,在50-130(km/h)車速范圍內(nèi),進(jìn)行了基于D值(汽車轉(zhuǎn)向中心與第1軸的距離)的兩種轉(zhuǎn)向試驗對比分析:固定D值(Fixed D value,F(xiàn)D)和可變D值的角階躍輸入響應(yīng)試驗。仿真結(jié)果表明:采用基于D值的橫擺角速度PID控制策略(PID-D)能顯著改善多軸汽車的操縱穩(wěn)定性,車速為100km/h時,在橫擺角速度穩(wěn)態(tài)值基本不變的情況下,超調(diào)量降低0.08%,收斂時間降低20.4%;質(zhì)心側(cè)向加速度穩(wěn)態(tài)值降低0.14%;質(zhì)心側(cè)偏角穩(wěn)態(tài)值降低17.8%,更接近零值。
多軸汽車;轉(zhuǎn)向中心位置控制;后軸主動轉(zhuǎn)向;PID-D控制策略;聯(lián)合仿真
前言
多軸汽車在長距離和大噸位的汽車運輸中承擔(dān)著重要的角色,但由于整車尺寸大、重心高,因此在高速行駛拐彎時,極易引發(fā)側(cè)翻、甩尾等危險工況,極大地影響著公路的運輸安全性。因此非常有必要針對這一工況進(jìn)行研究,提高多軸汽車的高速行駛安全性。
目前國內(nèi)外對多軸汽車轉(zhuǎn)向的研究主要集中在以下幾方面:(1)基于時間跨度的控制策略:Kharrazi等人利用改善側(cè)偏特性的控制器,控制被牽引單元的軸,調(diào)節(jié)駕駛員轉(zhuǎn)向和牽引單元處輪胎側(cè)向力產(chǎn)生的時間跨度,來改善橫擺角速度的響應(yīng)性能和偏離跟蹤性[1]。(2)全輪驅(qū)動-多軸轉(zhuǎn)向技術(shù):10×10全輪驅(qū)動的太拖拉鳳凰歐6重型自卸車采用第一、二、五軸轉(zhuǎn)向的功能,來改善轉(zhuǎn)向穩(wěn)定性[2]。(3)直接橫擺力矩控制策略:劉永騰針對多軸電驅(qū)動車輛,設(shè)計了模糊-直接橫擺力矩控制策略,實現(xiàn)了橫擺角速度和質(zhì)心側(cè)偏角的雙目標(biāo)控制[3]。(4)主動轉(zhuǎn)向控制策略:方凌霄建立了線性二自由度車輛動力學(xué)模型,進(jìn)行了后輪比例控制、橫擺角速度反饋四輪比例控制等四種主動轉(zhuǎn)向控制系統(tǒng)對比分析,并得出結(jié)論:以零質(zhì)心側(cè)偏角為控制目標(biāo)的四輪轉(zhuǎn)向控制策略能改善操縱穩(wěn)定性[4]。但以上研究沒有分析轉(zhuǎn)向過程中,后輪動態(tài)轉(zhuǎn)向?qū)ζ嚥倏v穩(wěn)定性的影響。
研究表明:多軸汽車采用同相位轉(zhuǎn)向(前、后軸車輪轉(zhuǎn)向方向相同),會減小高速行駛轉(zhuǎn)向的橫擺角速度,有助于避免汽車甩尾失穩(wěn)[5]。但由此會導(dǎo)致多軸汽車行駛軌跡發(fā)生改變,駕駛員為完成預(yù)定軌跡的行駛要求,需要額外的調(diào)節(jié)方向盤,從而會增加駕駛員的操作強度,并且也會導(dǎo)致駕駛感受不同,需要駕駛員進(jìn)行適應(yīng)。因此迫切需要提出一種新的控制策略:在不改變汽車行駛軌跡的前提下,降低橫擺角速度的超調(diào)量、縮短收斂時間。
由于多軸汽車后軸到質(zhì)心的距離較大,因此后輪轉(zhuǎn)向時會對質(zhì)心產(chǎn)生較大的轉(zhuǎn)向力矩,從而對整車橫擺角速度產(chǎn)生顯著影響。基于此,本文提出:在轉(zhuǎn)向過程中,通過動態(tài)改變轉(zhuǎn)向中心到第一軸的距離來改善多軸汽車的操縱穩(wěn)定性。
1 基于轉(zhuǎn)向中心到第一軸距離的轉(zhuǎn)向控制理論
為了便于研究,將全輪轉(zhuǎn)向五軸汽車簡化為線性二自由度(側(cè)向運動和橫擺運動)模型,汽車質(zhì)心為坐標(biāo)系原點O,x軸平行于地面,指向汽車前進(jìn)方向,z軸垂直于地面向上,y軸根據(jù)右手定則,指向左邊[6],如圖1所示。
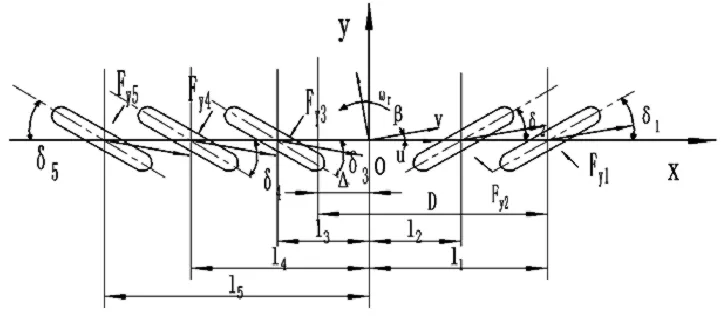
圖1 五軸汽車全輪轉(zhuǎn)向二自由度模型
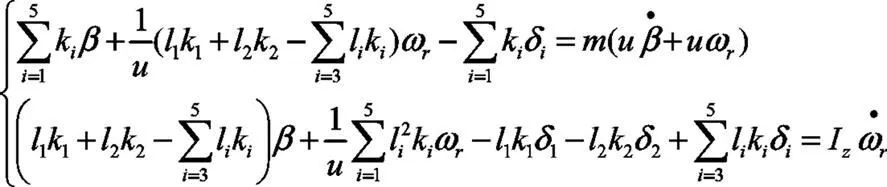
對五軸汽車進(jìn)行受力分析[7],定義轉(zhuǎn)向中心前為正,否則為負(fù),可得:

式中,δ為汽車第i軸車輪偏轉(zhuǎn)角,單位rad,與第一軸轉(zhuǎn)角方向相同為正,否則為負(fù)。
將式(1)整理,得到模型運動微分方程:
將上式改寫成狀態(tài)空間方程為:

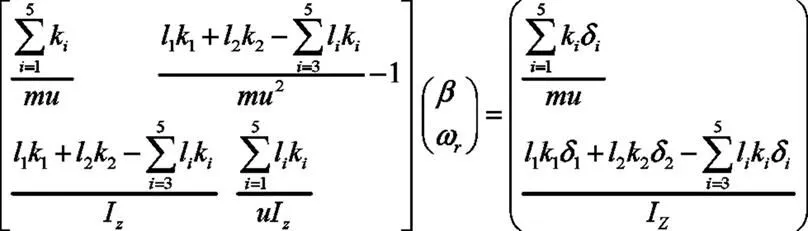
再由克萊姆法則計算得:

最佳的轉(zhuǎn)向過程是要求所有的車輪都處于純滾動而沒有滑移狀態(tài),或者只有極小的滑移,因此要求全部車輪都繞一個瞬時轉(zhuǎn)向中心做圓周運動,即符合阿克曼定理[9]。由多軸轉(zhuǎn)向車輛的阿克曼定理[10]得:

式中,為汽車轉(zhuǎn)向中心與第1軸的距離。
于是有:


整理可得,
將比例系數(shù)為K帶入式(5)得:

由以上公式推導(dǎo)可得:改變值會對操縱穩(wěn)定性產(chǎn)生影響,即可以通過改變汽車轉(zhuǎn)向中心前后的位置來改善汽車操縱穩(wěn)定性。
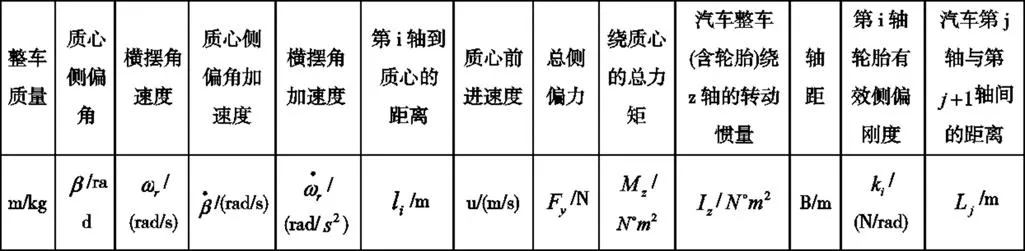
表1 五軸全輪轉(zhuǎn)向汽車主要變量參數(shù)
基于此,本文提出基于的橫擺角速度PID控制策略:當(dāng)汽車轉(zhuǎn)向時,根據(jù)汽車的轉(zhuǎn)向盤轉(zhuǎn)角和車速,計算出目標(biāo)橫擺角速度,作為PID控制目標(biāo),通過調(diào)整利值大小,實現(xiàn)對汽車橫擺角速度的PID控制,如圖2所示。
圖2 控制系統(tǒng)仿真模型
2 整車建模與聯(lián)合仿真實驗
利用ADAMS/View建立五軸全輪轉(zhuǎn)向全輪驅(qū)動的整車動力學(xué)模型,如圖3所示。利用MATLAB/Simulink建立基于的后軸轉(zhuǎn)向控制策略模型。圖4為聯(lián)合仿真控制框圖。
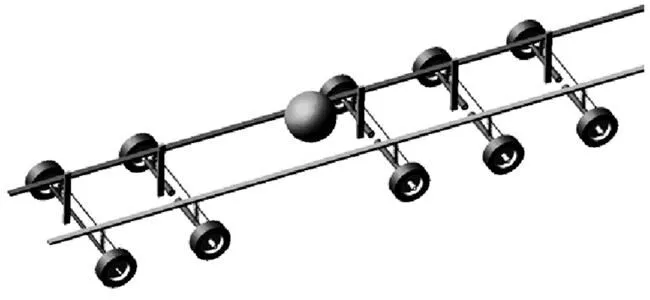
圖3 五軸汽車模型

圖4 ADAMS與Simulink的聯(lián)合仿真控制框圖
3 基于D的后軸轉(zhuǎn)向控制策略的仿真結(jié)果分析
為驗證本文提出的基于的多軸汽車操縱穩(wěn)定性控制,利用前面所建立的聯(lián)合仿真平臺,分別進(jìn)行了值固定(FD控制策略)和基于值進(jìn)行橫擺角速度PID控制(PID-D控制策略)的仿真對比試驗。
該試驗選取車速為[50,60,70,80,90,100,110,120,130](km/ h),仿真結(jié)果如圖5-8所示。
(1)采用PID-D控制策略時,在同一車速下,汽車橫擺角速度收斂時間相對于FD控制策略縮短,并且超調(diào)量變小,如圖5所示,說明汽車操縱穩(wěn)定性變好。
(2)在同一車速下,PID-D的質(zhì)心側(cè)向加速度穩(wěn)態(tài)值的絕對值均小于FD的側(cè)向加速度穩(wěn)態(tài)值的絕對值,如圖6所示,說明PID-D的側(cè)翻的可能性小,汽車更安全。
(3)高速時,采用PID-D控制策略,質(zhì)心側(cè)偏角更接近零,說明軌跡跟蹤性好。但在低速時,質(zhì)心側(cè)偏角較大,說明采用基于D的橫擺角速度的策略,汽車機動靈活性變好。
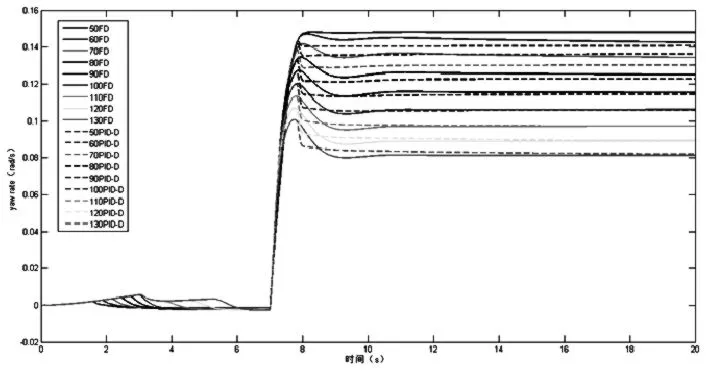
圖5 不同速度下的橫擺角速度階躍響應(yīng)比較
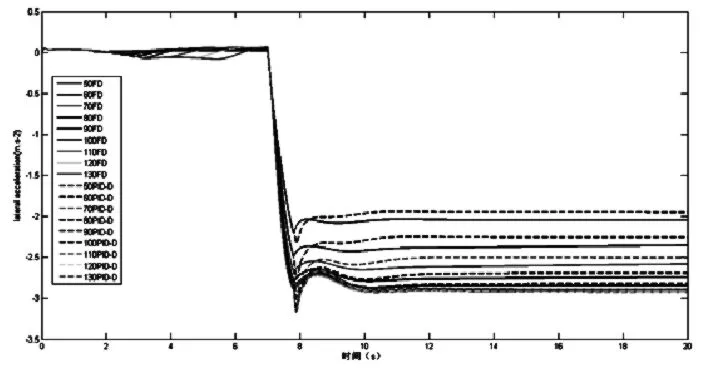
圖6 不同速度下的側(cè)向加速度階躍響應(yīng)比較
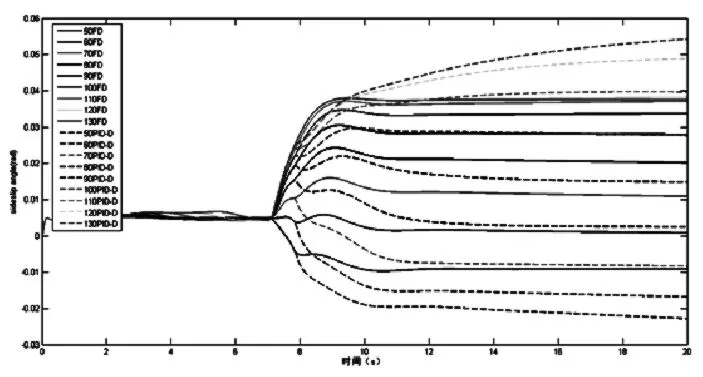
圖7 不同速度下的質(zhì)心側(cè)偏角階躍響應(yīng)比較

圖8 不同速度下的質(zhì)心運動軌跡比較
隨著車速提高,汽車的質(zhì)心側(cè)偏角的穩(wěn)態(tài)值由負(fù)變正。特別車速在70-100km/h時,PID-D的質(zhì)心側(cè)偏角穩(wěn)態(tài)值的絕對值均小于FD的側(cè)偏角穩(wěn)態(tài)值的絕對值,說明采用PID-D控制策略可以一定程度上緩解汽車側(cè)向滑移的趨勢,但此時曲線穩(wěn)態(tài)前波動較大并且超調(diào)量較大,這個問題還需要進(jìn)一步完善,如圖7所示。
如圖8所示為質(zhì)心運動軌跡曲線,速度在50-70km/h時,F(xiàn)D和PID-D的質(zhì)心運動曲線未完全重合,偏移距離依次為5.676m,5.268m,5.045m,隨著車速增加,兩者的質(zhì)心軌跡曲線重合,說明高速時采用PID-D控制策略,汽車質(zhì)心的行駛軌跡變化不大,這樣不會增加駕駛員開車的難度。主要原因是,采用新的控制策略以后,汽車的穩(wěn)態(tài)橫擺角速率基本保持不變。
4 結(jié)論
針對多軸汽車高速轉(zhuǎn)向操縱穩(wěn)定性差的問題,在不同車速下,進(jìn)行了FD和PID-D的對比仿真試驗,發(fā)現(xiàn)多軸汽車以不同車速行駛轉(zhuǎn)向時,動態(tài)改變D值會改善汽車的操縱穩(wěn)定性:
(1)汽車在轉(zhuǎn)向過程中,車速相同且PID-D和FD的橫擺角速度達(dá)到相同穩(wěn)態(tài)值的情況下,采用PID-D控制策略的橫擺角速度的響應(yīng)時間短、超調(diào)量較小;并且,質(zhì)心側(cè)向加速度穩(wěn)態(tài)值的絕對值更小,說明此時汽車發(fā)生側(cè)傾失穩(wěn)的可能小。
(2)在適當(dāng)?shù)能囁傧拢琍ID-D控制策略可以在一定程度上調(diào)節(jié)多軸汽車的質(zhì)心側(cè)偏角大小,保持良好的軌跡跟蹤性。
(3)采用PID-D控制策,行駛軌跡基本不變,駕駛員不需要額外的轉(zhuǎn)向操作,減少了駕駛員的轉(zhuǎn)向工作量。
綜上所述,采取PID-D(基于D的橫擺角速度控制)策略能有效地改善多軸汽車轉(zhuǎn)向操縱穩(wěn)定性。
[1] Kharrazi S, Lidberg M, Roebuck R, et al. Implementation of Active Steering on Longer Combination Vehicles for Enhanced Lateral Per -formance[J]. Vehicle System Dynamics,2012.
[2] 高恩壯.三軸重型汽車轉(zhuǎn)向特性及其控制方法研究[D].西安:長安大學(xué),2017.
[3] 劉永騰.基于ADAMS和SIMULINK的多軸電動車建模與操縱穩(wěn)定性研究[D].長春:吉林大學(xué),2015.
[4] 方凌霄.主動轉(zhuǎn)向控制策略及其改善轉(zhuǎn)向響應(yīng)機理的研究[D].長春:吉林大學(xué),2018.
[5] 張平霞,高利,朱永強.多軸電動輪汽車雙目標(biāo)操縱穩(wěn)定性優(yōu)化分析[J].機械設(shè)計與制造,2014,(10):5-7.
[6] 鮑婕.某6×6車輛操縱穩(wěn)定性研究[D].北京:北京理工大學(xué),2015.
[7] 張俊友,王樹鳳,李華師.五軸重型全輪轉(zhuǎn)向汽車操縱穩(wěn)定性分析[J].農(nóng)業(yè)機械學(xué)報,2008,(9):30-34.
[8] 于祥歡,孫大剛,何成林.九軸全地面起重機轉(zhuǎn)向模式及其性能研究[J].太原科技大學(xué)學(xué)報,2017,38(4):283-288.
[9] 張平霞,高利,朱永強.五軸汽車同相位程度對轉(zhuǎn)向性能的影響分析[J].系統(tǒng)仿真學(xué)報,2015,(3):627-633.
[10] Pingxia Zhang,Li Gao,Yongqiang Zhu.Study on control schemes of flexible steering system of a multi-axle all-wheel-steering robot[J].. DOI:10.1177/1687814016651556.
Research on Steering Stability of Multi-Axle Vehicles Based on Front andRear Position Control of Steering Center
Li Yunhong, Zhu Yongqiang
(School of Mechanical and Automotive Engineering, Qingdao University of Technology, Shandong Qingdao 266520)
In view of the problem of poor steering stability of multi-axle vehicles at high speeds, a co-simulation platform for five-axle all-wheel steering vehicle was established using ADAMS-Simulink, doing a comparison analysis of two steering tests based on the D value (distance between the steering center of the vehicle and the first axle): angular step input response experiments of fixed D value and variable D value in the range of 50-130 (km/h) vehicle speeds. Simulation results show that the PID control strategy of yaw rate based on D-value(PID-D) can significantly improve the steering stability of multi-axle vehicles, when the vehicle speed is 100km/h, in the case where the steady state value of the yaw rate is substantially constant, the overshoot is reduced by 0.08% and the decrease of convergence time is 20.4%; the steady state value of the lateral acceleration is decreased by 0.14%; and the steady state value of the sideslip angle is decreased by 17.8%, closer to zero.
multi-axle vehicle; steering center position control; rear axle active steering; PID-D control strategy; co-simulation
U463.4
A
1671-7988(2019)07-50-04
李運洪(1994-),女,碩士研究生,就讀于青島理工大學(xué)機械與汽車工程學(xué)院,研究方向:車輛動力學(xué)。朱永強,(1975-),男,博士(后),青島理工大學(xué)機械與汽車工程學(xué)院副教授,研究方向:車輛動力學(xué)、虛擬現(xiàn)實技術(shù)。
U463.4
A
1671-7988(2019)07-50-04
10.16638/j.cnki.1671-7988.2019.07.017
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
汽車與安全(2019年9期)2019-11-22 09:48:03
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
決策探索(2014年21期)2014-11-25 12:29:50
電測與儀表(2014年17期)2014-04-04 11:56:50