GPS測量技術在水庫測量中的應用分析
2019-04-09 07:21:00邵燕
陜西水利 2019年2期
邵 燕
(烏魯木齊水業集團有限公司,新疆 烏魯木齊 830049)
0 引言
隨著科學技術的發展,水利工程測量技術不斷進步,GPS測量技術在水利工程測量中的應用越來越廣泛。在水利工程測量中應用GPS測量技術有著諸多優勢,其主要表現為效率高、成本低、精度高,無需通視等。目前,RTK實時動態差分法可以在數秒內獲得由基準站所發出的GPS高精度定位數據,在未來水利工程測量中,GPS測量技術有著廣闊的應用前景。
1 工程概況
烏拉泊水庫是烏魯木齊河中游的一座蘭河水庫,該水庫于1961年8月建成并投入使用,水庫主要建筑物包括大壩、放水涵洞、泄水渠、溢洪道等組成部分。水庫大壩長1050 m,壩頂高程1089.6 m,防浪墻高1.2 m,墻頂高程1090.8 m,壩頂寬6 m,最大壩高27.6 m。該水庫先后經歷過4次除險加固,前期一直未設置大壩表面變形觀測設施,本次除險加固結束后,在壩頂布設11個觀測橫斷面,用于觀測大壩的水平位移和垂直位移,監測大壩表面變形狀態。
2 GPS測量技術特點以及注意事項
2.1 GPS測量技術特點
GPS技術是一種無線式的導航系統,其工作原理是通過從GPS全球定位系統中衛星發射的信息進行工作。GPS測量技術主要有以下幾點優勢:定位的精度高、觀測耗時較短,并且測站之間不需要進行通視,且在測量時能夠提供三維坐標,方便操作。除此之外,GPS技術的續航能力十分出眾,能夠進行全天候野外作業。同時,其自動化水平也是其他測量技術無法比擬的,測量人員在使用上易于上手。
2.2 GPS測量技術注意事項
(1)防止惡劣冰雪氣象環境干擾GPS測量
惡劣冰雪天氣、環境會對GPS測量形成干擾,甚至導致GPS測量設備無法接收到衛星提供的坐標信息數據。除此之外,測量工程所處的環境也會對測量形成干擾,特別是大面積的水域或者高大樹木的遮擋都會對GPS測量形成干擾,影響測量精度。因此,在進行GPS測量時應該盡量選擇在天氣條件良好,并且在測量時應該避開大面積的水域或高大樹木或者建筑物的干擾,提高精確度。
(2)GPS測量設備的兩級組網不能單獨測量
在測量時由于受到GPS測量設備的續航條件的限制,常常導致測量時測量到一半而不得不終止測量。因此,在進行測量時應該連續進行測量,不能只對其中的一組網進行單獨測量,否則會導致數據無法銜接。
(3)測量設備故障與功能指示標志容易混淆
GPS測量設備的功能指示燈常常與故障燈混淆,導致設備出現故障時無法在第一時間確認其是否出現故障。在進行三級網測量時,GPS測量設備TRK初始化時,其指示燈為紅色,而測量設備出現故障時其指示燈也是紅色。
3 GPS測量技術在烏拉泊水庫測量中的應用
3.1 水庫大壩監測網布設
在對烏拉泊水庫進行監測時,主要采用了GPS自動監測技術對水庫大壩進行了安全監測。監測人員根據烏拉泊水庫大壩的實際情況和設計規范,將綜合標點作為位移觀測標點,水庫大壩位移觀測分別進行了水平位移觀測和豎向位移觀測,本次水庫安全監測采用的是網連式。測量人員在大壩壩頂一共布設了11個觀測橫斷面22個觀測墩,樁號分別為0+064、0+117、0+275、0+400、0+528、0+558、0+588、0+660、0+728、0+800 和 0+850,每個斷面在壩頂防浪墻上游側和下游側各設1個測點。壩下游布設 4 個工作基點(K1、K2、K3、K4)。在監測時因為距離較短無法滿足GPS測量精度要求的,監測人員必須按照專用平面控制網進行加密網布設,起算數據為首級基準網點。通過間隔點法增加觀測網相鄰間距。
3.2 儀器選擇及檢驗
本次烏拉泊水庫測量中,測量儀器選用的是拓普康公司生產的GPS設備,該設備是HiPer GA型雙頻接收。該GPS設備的測距標稱準確度為3 mm+0.5×10-6D(D為實測距離,單位mm);強制對中裝置選用四川飛翔F-1A型通用強制對中底盤。GS09天線上有發光二級管指示器,這些指示器能夠指示基本的天線狀態。在測量時,測量人員根據指示燈的顯示顏色,就可以判斷GPS設備當前的工作狀態。GPS測量設備的指示燈狀態見表1。
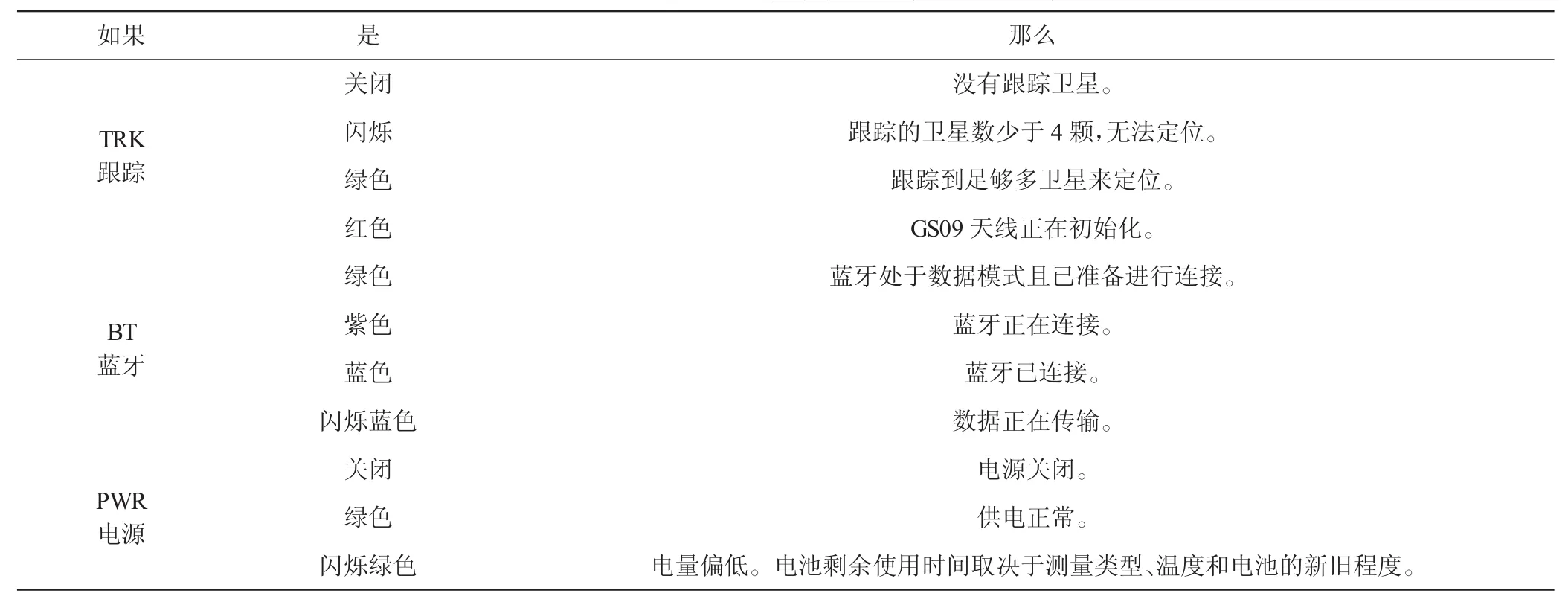
表1 GPS測量設備指示燈顏色與狀態對應一覽表
3.3 GPS外業測量
為提高水庫監測資料的連續性和準確性,在監測時測量人員必須建立與原坐標系統一致的GPS變形監測坐標系,然后通過國家三角點實施首級變形監測網坐標傳遞。監測人員首先應該按照實際需求設置GPS觀測控制指標,具體操作如下:
(1)衛星高度截止角不小于15℃;
(2)同時觀測衛星有效個數大于等于4個;
(3)有效觀測衛星總數大于等于4個;
(5)觀測時段大于等于90 min;
(6)采樣間隔為30 s;
(7)GDP小于等于6個;
(8)任一衛星有效觀測時段大于等于15 min。
其次,烏拉泊水庫的測量人員在新疆水利水電科學研究院的協助下,從新疆水利水電學院獲取了4個控制點以及22個觀測墩的初始值。但是在多次測量中,測量人員解算的數據與原始數據始終存在100多米的差距。為了能夠得到更加準確的數據,烏拉泊水庫的測量人員在新疆地震局的專業技術人員的幫助下,測量人員對烏拉泊水庫測量進行了改進和優化,具體內容如下:
(1)測量中的優化網型布置及測量時長
測量人員對烏拉泊水庫的網型進行了重新布置和優化,重新優化后其網型共分為一、二、三級網,并且規定了每級網的測量時長。一級網主要包括四個控制點K1、K2、K3、K4,每次測兩個小時,測滿兩小時后關機,再開機測兩小時;二級網主要是從22個觀測墩中選取了4個觀測墩和4個控制點組成了三個四邊形的網型,每組測2小時;三級網包括壩頂上的11組觀測墩,每組測1.5 h。最先開機的最后關機,要充分保證每級網測量的測量時長。
(2)優化調整部分GPS設置內容
①將GPS的采樣率設置,從原先的10 s提高至30 s;
②高度角設置修改為15。
在渡河作戰中,紅軍抓到了一個誤傳軍令的晉軍傳令兵,“押著去見指揮戰斗的師長賀晉年,賀晉年一看那份軍令,大驚失色”,得知敵人正在偷襲我軍總部指揮所,于是及時地派出兵力參加救援總部的戰斗。這場誤會反使我們好像有了千里眼和順風耳,毛澤東對此夸獎不止,又說:“要是閻錫山知道這是他的兵送的情報放跑了毛澤東,肯定氣得吹胡子呦!”誤傳軍令這類事,在通訊工具不夠發達的抗戰初期是經常發生的,卻不一定發生在跟紅軍總部有關的戰斗中,現在作者把它拿來一用,既使小說增加了閱讀的興味,也為表現毛澤東性格的豐富性創造了條件。
③附加輸出——“殘差”;
④自動處理——“基線重算”;
⑤投影——中央子午線——“9改87”;
⑥帶寬——“3.00.0”。
3.4 GPS數據處理
為了對GPS觀測數據基線向量和觀測結果質量進行校對,測量人員必須對獲取的GPS數據進行預處理,并且結合預處理結果分析測量結果的準確性和精度。測量人員使用Leica Geo Office處理軟件對本次GPS數據進行了坐標轉換等處理,GPS的具體處理步驟如下:
(1)新建項目與原始數據輸入;
(2)基線處理;
(4)坐標轉換;
(5)困難數據分析及處理。
3.5 GPS數據結果分析
(1)各觀測點左右岸方向位移
在烏拉泊水庫的主壩段(0+064—0+528)m,其中4組觀測墩均兩兩左右岸同方向發生位移;另外TP2、TP3、TP4這三組均向右岸發生了位移,TP5、TP16這一組均向左岸發生了位移;副壩段(0+558—0+850)m,TP6、TP17這一組觀測墩均同向左岸發生了位移,TP10與TP21這一組觀測墩是反方向發生位移的。
(2)各觀測點上下游方向位移
烏拉泊水庫從總體上看,主壩段(0+064—0+528)斷面上、下游兩觀測墩位移較大,主壩段5組觀測墩均同向下游發生了位移,副壩段TP6、TP17這一組同向下游發生了位移,TP10、TP18這兩個觀測墩與原始值相比為無變化,(TP8、TP9、TP11)這三組上下游觀測墩是反方向發生位移的。副壩段位移相對主壩段要小。詳細數據見表2。
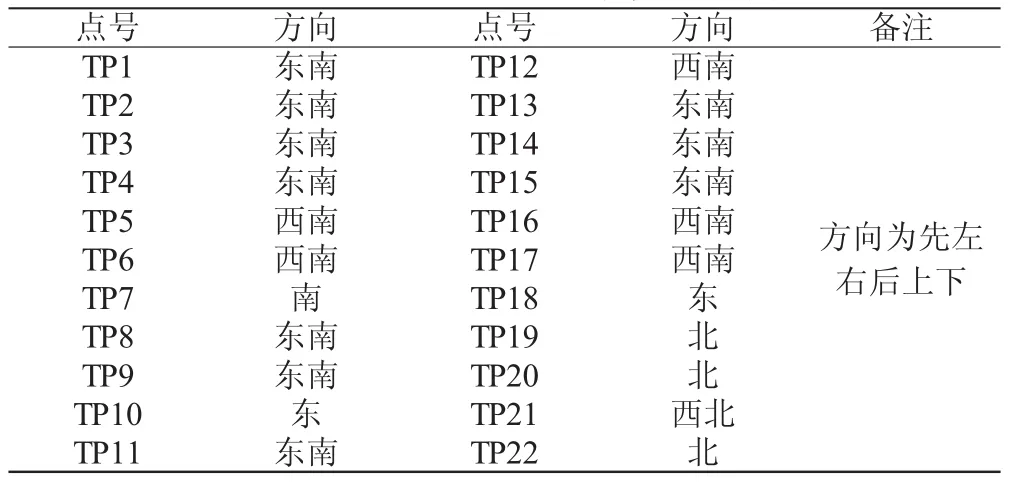
表2 22個觀測墩水平位移方向
4 結語
綜上,在本次對烏拉泊水庫的測量中,各測點的觀測值與原始值之間的變化除個別點較大外,其余測點的變化均在毫米之間。從總體上講烏拉泊水庫大壩雖然發生了一定的位移,但是其穩定狀態并沒有受到較大影響。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
設備管理與維修(2015年12期)2015-04-09 06:57:00