GPS地面沉降監(jiān)測(cè)應(yīng)用與實(shí)踐
2019-04-08 06:21:36趙明金徐杰孟黎
工程建設(shè)與設(shè)計(jì) 2019年6期
關(guān)鍵詞:數(shù)據(jù)處理
趙明金,徐杰,孟黎
(1.山東省國(guó)土測(cè)繪院,濟(jì)南250102;2.山東城市建設(shè)職業(yè)學(xué)院,濟(jì)南 250014)
1 引言
地面沉降在GPS沉降監(jiān)測(cè)數(shù)據(jù)處理過(guò)程中,基準(zhǔn)點(diǎn)及點(diǎn)位坐標(biāo)基準(zhǔn)的選擇對(duì)于提高數(shù)據(jù)的處理精度和真實(shí)客觀地反映監(jiān)測(cè)點(diǎn)位沉降速率均具有十分重要的意義。基準(zhǔn)點(diǎn)要求建立在穩(wěn)定的基巖上,但由于地殼運(yùn)動(dòng)的存在,建立在基巖上的基準(zhǔn)點(diǎn)同時(shí)也存在水平和垂直方向上的運(yùn)動(dòng)。鑒于此,選用穩(wěn)定、高精度的動(dòng)態(tài)三維地心坐標(biāo)系,用于監(jiān)測(cè)網(wǎng)點(diǎn)的數(shù)據(jù)處理是整個(gè)數(shù)據(jù)處理中十分關(guān)鍵的一步。本文主要研究了利用北京、上海、武漢3座IGS站作為沉降監(jiān)測(cè)網(wǎng)中的基準(zhǔn)點(diǎn),聯(lián)合沉降監(jiān)測(cè)網(wǎng)中的監(jiān)測(cè)點(diǎn)在ITRF2008框架下統(tǒng)一平差,從而確定各監(jiān)測(cè)點(diǎn)位的高精度垂直變化分量,得到點(diǎn)位的沉降值。
2 ITRF2008的實(shí)現(xiàn)
國(guó)際地球參考框架即ITRF,是指國(guó)際地球參考系(ITRS)的一種具體實(shí)現(xiàn),ITRF是基于VLBI、LLR、SLR、GPS和DORIS等空間技術(shù)所建立起來(lái)的現(xiàn)代全球地面參考框架,它提供了一個(gè)全球統(tǒng)一的、地心的、三維的和動(dòng)態(tài)的高精度地面坐標(biāo)參照基準(zhǔn),并廣泛應(yīng)用于全球范圍內(nèi)精密定位、地殼形變監(jiān)測(cè)、地球動(dòng)力學(xué)研究等。當(dāng)前常用的框架種類包括:ITRF2000、ITRF2005 和 ITRF2008[1]。
2.1 ITRF2008
ITRF2008的實(shí)現(xiàn)是基于VLBI、SLR、GPS和DORIS 4種空間測(cè)量技術(shù)聯(lián)合重新處理后而得,該4項(xiàng)技術(shù)觀測(cè)時(shí)間跨度分別為29年、26年、12.5年和16年。其原點(diǎn)定義為在歷元2005.0時(shí)ITRF2008與ILRS的SLR解的平移參數(shù)及其速率為0;尺度定義為在歷元2005.0時(shí)ITRF2008與相對(duì)于VLBI和SLR時(shí)間序列的平均尺度及尺度變化率為0;定向定義為在歷元2005.0時(shí)ITRF2008相對(duì)于ITRF2005選轉(zhuǎn)參數(shù)和旋轉(zhuǎn)速率為0[2]。
2.2 ITRF2008與其他框架的比較
相對(duì)于ITRF2000,ITRF2005在基準(zhǔn)定義和實(shí)現(xiàn)方面均做了進(jìn)一步的完善和調(diào)整。尤其是二者差異造成的測(cè)站坐標(biāo)差在毫米級(jí)(ITRF2000與ITRF2005的差異對(duì)GNSS數(shù)據(jù)處理的影像),對(duì)高精度GPS數(shù)據(jù)處理存在一定影響[3]。
雖然ITRF2005相對(duì)ITRF2000有所改進(jìn),但在內(nèi)部一致性和穩(wěn)定性方面存在明顯缺憾。相對(duì)于ITRF2005,ITRF2008采用新的絕對(duì)相位中心偏移模型(IGS08)、新的重力場(chǎng)模型(EGM08)、衛(wèi)星及測(cè)站的變化模型、天線溫度形變等改正,這些策略的采用證明了ITRF2008的性能高于ITRF2005,因此,采用ITRF2008框架數(shù)據(jù)解算時(shí)基線重復(fù)性分布更合理,解更趨于穩(wěn)定。
3 應(yīng)用案例
東部沿海某地區(qū)由于長(zhǎng)期超量開采地下水,已導(dǎo)致地下水位大幅度下降,進(jìn)而誘發(fā)地面沉降、裂縫等地質(zhì)災(zāi)害。為確保當(dāng)?shù)亟?jīng)濟(jì)建設(shè)和經(jīng)濟(jì)社會(huì)發(fā)展需要,及時(shí)向有關(guān)部門提供沉降資料,系統(tǒng)全面掌握地面沉降數(shù)據(jù),從2008年開始,進(jìn)行GPS沉降監(jiān)測(cè),每年觀測(cè)一期。
3.1 布網(wǎng)
沉降監(jiān)測(cè)網(wǎng)點(diǎn)包括基準(zhǔn)點(diǎn)和監(jiān)測(cè)點(diǎn)2部分。基準(zhǔn)點(diǎn)由北京、上海、武漢3座IGS站組成,如圖1所示。
監(jiān)測(cè)點(diǎn)位的標(biāo)石選址都選在該地區(qū)具有代表性的地質(zhì)環(huán)境區(qū)。共計(jì)布設(shè)18點(diǎn)位(見圖2)。點(diǎn)位建設(shè)參照B級(jí)GPS點(diǎn)建設(shè)規(guī)范。
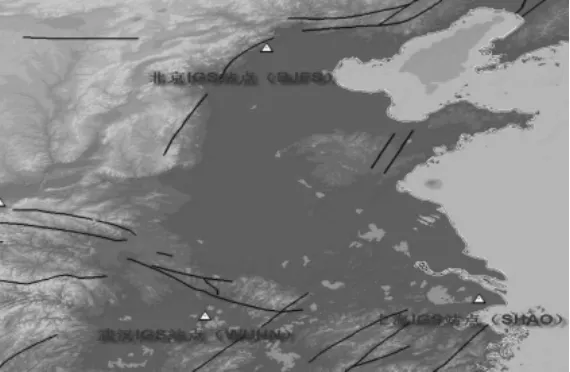
圖1 基準(zhǔn)點(diǎn)分布圖
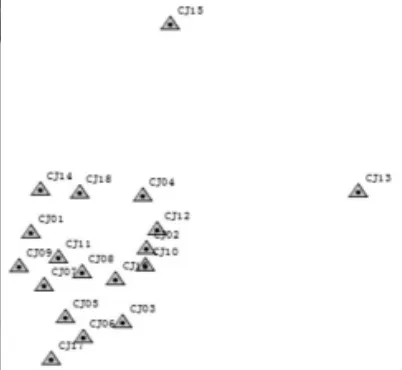
圖2 監(jiān)測(cè)點(diǎn)位分布圖
3.2 基線解算
數(shù)據(jù)基線解算軟件采用GAMIT(10.4)。精密星歷采用IGS最終星歷。經(jīng)計(jì)算統(tǒng)計(jì),每天解的NRMS值均小于0.2,基線絕對(duì)中誤差均為毫米級(jí),相對(duì)中誤差最小值在10~9量級(jí),最大值在10~7量級(jí),大部分?jǐn)?shù)值保持在10~8量級(jí),由于基線過(guò)多,在此不做統(tǒng)計(jì)表述。
3.3 平差
網(wǎng)平差軟件采用武漢大學(xué)GPS工程技術(shù)研究中心研制的POWERNET,平差時(shí)以GAMIT的結(jié)果O文件為輸入文件,采用同步觀測(cè)網(wǎng)的獨(dú)立基線向量及其全協(xié)方差矩陣作為觀測(cè)量。
3.3.1 參考框架
參考框架選用ITRF2008,每期數(shù)據(jù)處理歷元如表1所述。

表1 各期數(shù)據(jù)處理參考?xì)v元
3.3.2 起算坐標(biāo)選擇
在綜合評(píng)價(jià)SOPAC、ITRS官網(wǎng)發(fā)布的ITRF2008下的坐標(biāo)值及速度場(chǎng)換算后所得到觀測(cè)歷元的坐標(biāo)值后,發(fā)現(xiàn)精度不是十分理想,垂直方向上精度能降低0.5~4mm。因此,最終選擇了瑞士BERNE大學(xué)發(fā)布的全球IGS站周解作為沉降監(jiān)測(cè)網(wǎng)的起算數(shù)據(jù)。
3.3.3 平差精度評(píng)定
經(jīng)計(jì)算統(tǒng)計(jì)后,各點(diǎn)位垂直方向大地高U及點(diǎn)位中誤差RMS(U)如表2所示,除個(gè)別點(diǎn)位外,其余點(diǎn)位中誤差均優(yōu)于3mm,精度較高。
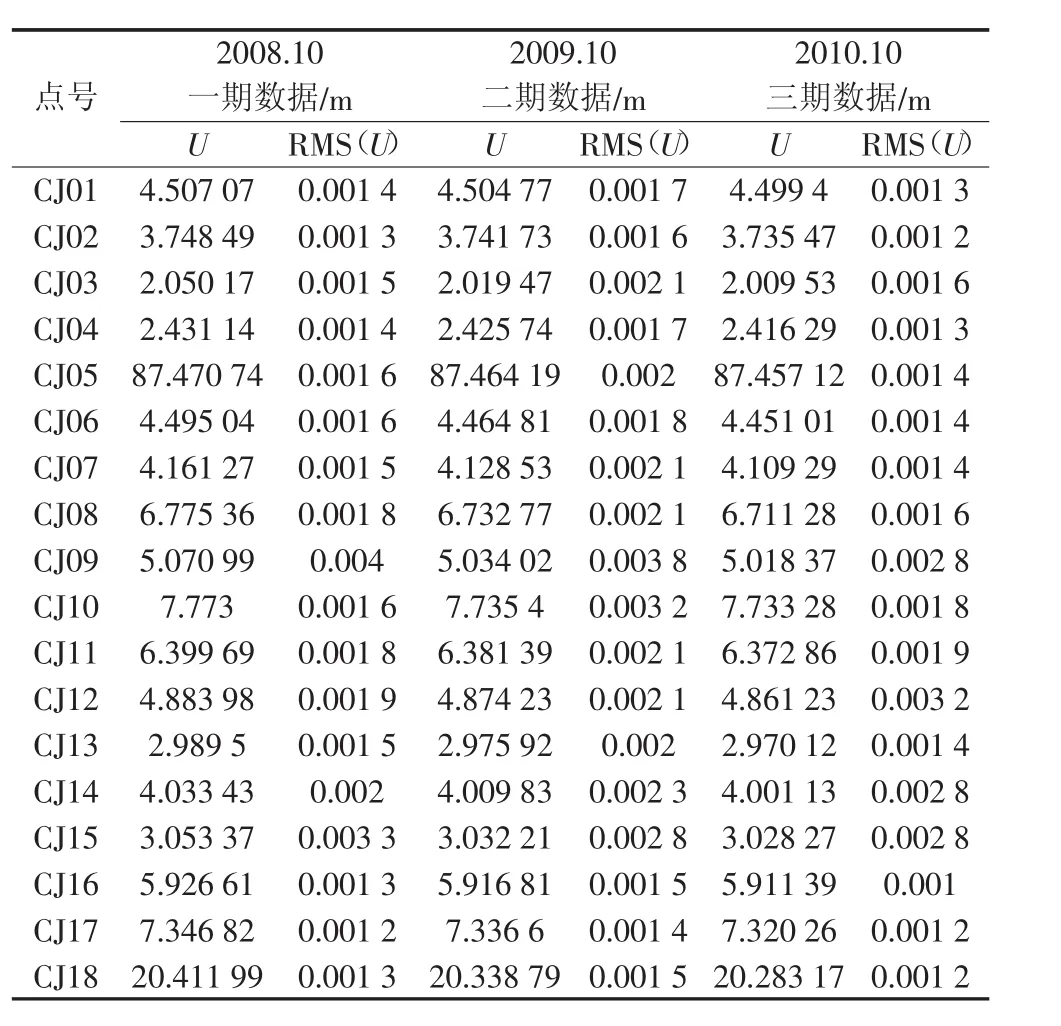
表2 每期數(shù)據(jù)點(diǎn)位大地高及垂直方向上中誤差
4 結(jié)論
對(duì)GPS精密數(shù)據(jù)進(jìn)行處理,并統(tǒng)一采用ITRF2008框架數(shù)據(jù)解算,可以得到優(yōu)于2mm精度的大地高,可以對(duì)亞厘米及厘米級(jí)的地面沉降進(jìn)行有效監(jiān)測(cè)。
猜你喜歡
中學(xué)生數(shù)理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
電子測(cè)試(2018年4期)2018-05-09 07:28:12
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
中國(guó)慣性技術(shù)學(xué)報(bào)(2015年1期)2015-12-19 13:12:17
計(jì)算機(jī)工程(2015年4期)2015-07-05 08:28:04
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22
聯(lián)合國(guó)青年技術(shù)培訓(xùn)(2014年7期)2014-04-12 00:00:00
中國(guó)質(zhì)量與標(biāo)準(zhǔn)導(dǎo)報(bào)(2014年7期)2014-02-28 22:24:35