利用結構等效轉換的空間可展機構裝配誤差建模與靈敏度分析
2019-04-04 07:14:18余德文趙強強陳飛飛郭俊康洪軍
西安交通大學學報 2019年4期
余德文,趙強強,陳飛飛,郭俊康,洪軍
(1.西安交通大學現代設計及轉子軸承系統教育部重點實驗室,710049,西安;2.上海宇航系統工程研究所,201109,上海)
由于運載火箭容積限制以及航天領域對空間天線性能要求的提高,大口徑、高精度的空間可展機構一直是空間技術的研究熱點。對于衛星天線來說,裝配精度很大程度上決定著工作性能。在實際工程中,由于受到桿件加工誤差、鉸鏈裝配誤差的影響,空間可展機構裝配精度往往達不到設計要求,為此工程人員經常在地面裝配過程中對其支撐桿件進行尺寸調整。然而,由于不清楚誤差源與裝配精度之間的關系,航天企業目前采用測量、調整、測量的純經驗盲調模式。因此,從提高裝配精度和實現定量裝調的角度出發,一套行之有效的裝配精度分析方法,對于保障空間可展機構裝配質量和提高衛星天線服役性能顯得尤為重要。
作為空間可展機構的典型代表,星載SAR天線空間可展機構備受學者關注。早期關于該類空間可展機構的研究主要集中在構型優化設計[1-5]和運動機理分析[6-11]上。繼Campbell等發明可展支撐桁架結構[12]后,又經設計人員的不斷改進[13-15],星載SAR天線空間展開機構已成功應用于美國SEASAT衛星[16]、歐空局ERS系列衛星[17]、加拿大RADARSAT系列衛星[18]、日本ALOS衛星[19]以及我國高分三號衛星[20]。
隨著運動控制趨于成熟,該類可展機構的拓撲結構也逐漸定型,具有桿件與環約束多、環約束互相耦合等特點,給幾何精度分析帶來了極大困難,目前只有少數學者進行了相關探索。Hedgepeth提出以天線平面節點偏差均方根為評價指標進行型面精度分析[21];Greene建立了一種基于有限元分析的評估桿件單元長度不確定性對天線性能影響的方法[22];Mobrem進一步總結出分析空間可展機構桿長對天線性能影響的蒙特卡羅法、逆頻率平方法、直接法與正則模法[23];受此啟發,吳建云等利用蒙特卡洛法,研究了可展機構中鉸鏈鎖定位置偏差對展開精度的影響[24]。
上述精度分析方法是建立在關鍵設計參數隨機分布的假設之上,結果無法指導具體產品的裝調[21-24]。另外,由于星載SAR天線空間可展機構在理想情況下,構型關于展開方向與天線板垂線方向所構成的平面對稱,因此一些研究者在分析其幾何精度時按平面連桿機構簡化處理。例如,文獻[25-26]構建了單桿件固定、雙桿件連接和多余桿件連接3種裝配單元的誤差模型,進而提出了多環閉鏈可展機構的精度預測算法,此模型對三維構型裝配誤差分析具有借鑒意義。文獻[27]從幾何誤差角度求解了極惡劣工況下的指向誤差。此外,張武翔等以結構勢能最小為目標函數,建立了空間可展機構尺寸調整的數學模型[28],然而定義的綜合調整量沒有真實的物理含義,并且去掉了可展機構中的部分支撐桿件,減少了實際存在的環約束,因此工程應用具有較大局限性。
本文提出了一種空間可展機構裝配誤差建模和靈敏度分析方法。首先,通過空間可展機構的等效轉換將其分為兩部分,基于閉環矢量與虛位移法,分別建立這兩部分結構的裝配誤差模型,經線性疊加后,全面表征出天線板位姿誤差與誤差源的函數關系,實現整個空間可展機構的幾何精度預測。在此基礎上,運用偏微分法分析裝配精度受誤差源的影響情況,從而識別出關鍵誤差源,并通過具體數值算例驗證所提方法的有效性。
1 問題描述
圖1給出了星載SAR天線空間可展機構的展開構型,主要由天線內板、天線外板、支撐桿件、90°鎖定鉸鏈和180°鎖定鉸鏈組成。天線內板通過兩個90°鎖定鉸鏈與星體連接,天線外板通過兩個180°鎖定鉸鏈與天線內板連接,天線內外板依靠支撐桿件增強與星體的連接剛度。可以看出,空間可展機構實質上是一個超靜定過約束機構。

圖1 星載SAR天線空間可展機構
在實際裝配過程中,空間可展機構調不準的頑疾至今仍未根除。因此,本文所需解決的問題是:如何從幾何角度出發,構建空間可展機構裝配精度與誤差源的函數關系,并找出影響裝配精度的關鍵桿件,以實現空間可展機構的裝配誤差預測和精準定量裝調。
2 裝配誤差建模
2.1 結構等效轉換
如前文所述,空間可展機構的展開構型屬于典型超靜定結構。在不考慮變形且不影響裝配精度的前提下,必須進行結構等效轉換以消除過約束。為此,將空間可展機構分為圖2所示的兩部分。第一部分由外撐桿、中撐桿、內撐桿及天線面板組成的不含星體連接桿的支撐結構;第二部分由星體連接桿與虛擬桿件(連接撐桿交匯中心O與90°鎖定鉸鏈幾何對稱中心B的假想桿件,其簡要表征不含星體連接桿的支撐結構)組成的雙桿件連接結構。
上述轉換的理由如下:由于SAR天線內外板間180°鎖定鉸鏈的間隙十分微小,并且鉸鏈鎖定后的結構剛度較大,因此兩板原有的平面度在整個裝調過程中保持不變,從而可把內外板視為一塊整板。不同于180°鎖定鉸鏈的是,連接星體與天線內板的90°鎖定鉸鏈間隙相對較大,容許天線面板一定范圍內的裝配誤差。綜上所述,將空間可展機構分成兩部分結構具有合理性。
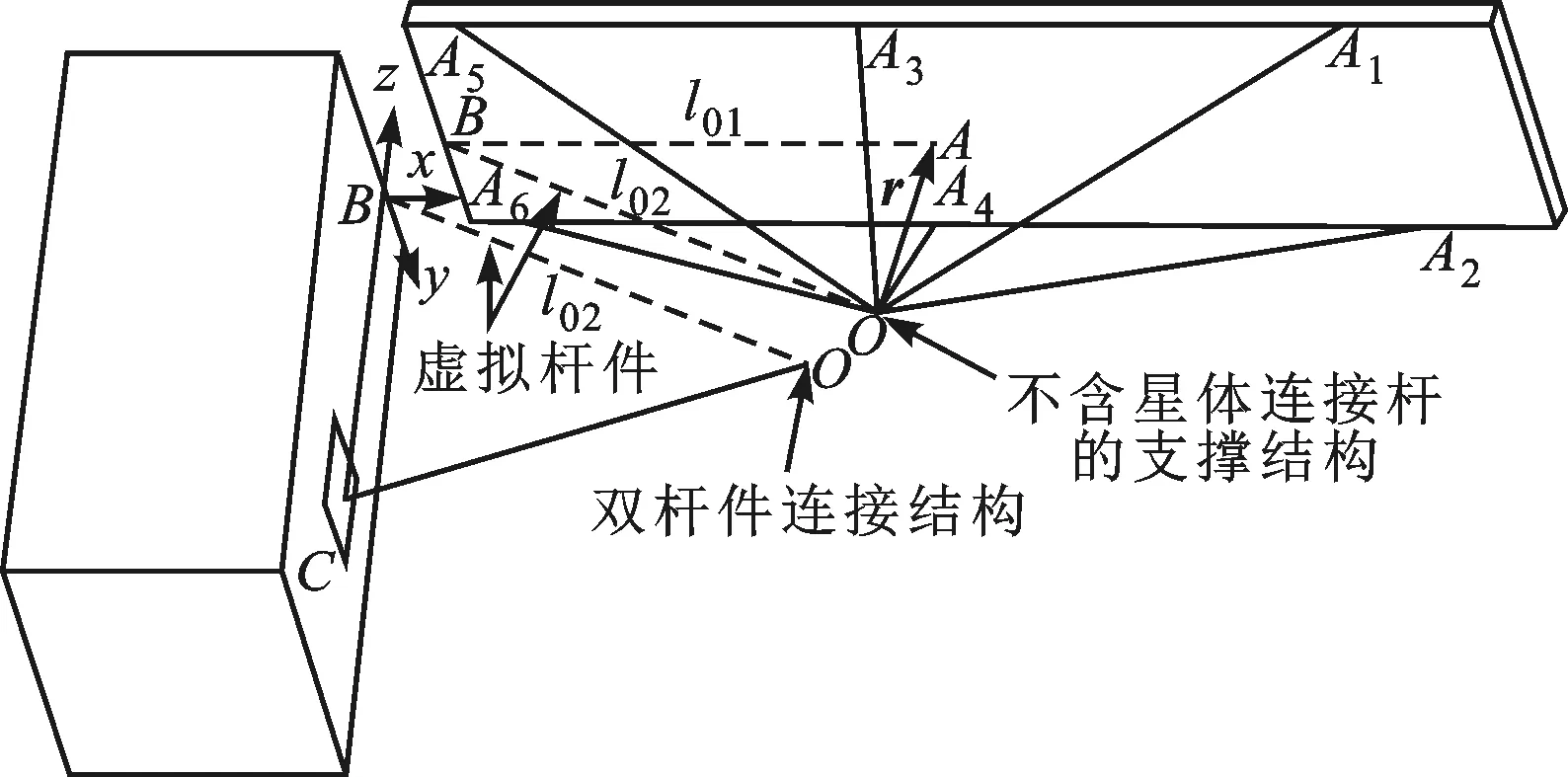
圖2 空間可展機構等效轉換模型
2.2 不含星體連接桿的支撐結構誤差建模
將支撐結構第一部分視作6-SPS(S-球鉸副,P-移動副)結構。一方面,桿長調整(加減墊片)的過程類似于移動副的直線運動,實質均是沿特定方向的特征尺寸發生改變;另一方面,由于天線面板位姿變化空間十分微小,且鉸鏈轉動副間存在徑向間隙,因此球鉸副代替轉動副為工程所接受。
如圖3所示,在6桿交匯中心的位置O建立局部坐標系O1-x1y1z1,x1軸正向沿天線面板長度方向并遠離星體,y1軸正向沿天線面板寬度方向且豎直向下,z1軸正向由右手法則確定。此外,在天線面板的幾何中心A建立局部坐標系O2-x2y2z2,該坐標系與坐標系O1-x1y1z1平行。

圖3 不含星體連接桿的支撐結構
在第i個封閉環O-A-Ai-O(i=1,2,3,4,5,6)中,滿足閉環矢量方程[29]
liui=r+Rai
(1)
式中:ui為由O指向Ai的單位矢量;li為桿件OAi名義長度;r為坐標系O1-x1y1z1下由O指向A的矢量;R為坐標系O2-x2y2z2到坐標系O1-x1y1z1的齊次變換矩陣;ai是Ai在O2-x2y2z2坐標系下的坐標。對式(1)兩邊全微分,有
dliui+lidui=dr+dRai+Rdai
(2)
(3)

(4)

(5)
在式(3)中,與名義桿長相比,桿長誤差均可視作無窮小量,即dli=Δli,dr=Δr,dai=Δai。接著,把式(4)帶入式(3)中,整理后可得
(6)
式(6)的矩陣表達形式如下
(7)
6個封閉環O-A-Ai-O均滿足等式(7),將其完全組合有
ΔL=JvΔV+JbΔB
(8)
式中:ΔL=[Δl1,Δl2,Δl3,Δl4,Δl5,Δl6]T,分別對應6桿的長度誤差;ΔB=[Δa1,Δa2,Δa3,Δa4,Δa5,Δa6]T,分別為6個鉸鏈的安裝位置誤差,有Δai=[Δxi,Δyi,Δzi];ΔV=[Δr,Δθ]T,Δr、Δθ分別為天線板相對于坐標系O1-x1y1z1的位置誤差、姿態誤差;Jv、Jb為ΔV、ΔB相應的系數矩陣,其具體表達式如下
(9)
由式(8)可得到不含星體連接桿的支撐結構裝配誤差的正解方程
(10)
至此,式(10)表達了天線面板位姿誤差與6個桿長誤差、6個鉸鏈安裝位置誤差的函數關系,而該位姿誤差是在坐標系O1-x1y1z1下衡量的。只要進一步得到坐標系O1-x1y1z1與全局坐標系的相對位姿關系,便能在全局坐標系下求解出天線面板的裝配誤差。
2.3 含星體連接桿的支撐結構誤差建模
如圖4所示,全局坐標系Og-xyz的原點為兩個90°鎖定鉸鏈理論安裝位置的幾何對稱中心B,x軸正向為沿天線面板長度方向并遠離星體,y軸正向為沿天線面板寬度方向且豎直向下,z軸正向根據右手法則確定。在全局坐標系Og-xyz中,局部坐標系O1-x1y1z1坐標原點O(O1)受星體連接桿影響,名義位置與實際位置之間存在裝配誤差。因此,下面將構建雙桿件連接裝配誤差模型,并確定O點位置誤差對空間可展機構幾何裝配精度的影響。

圖4 雙桿件連接結構及其平面表征
由于全局坐標系Og-xyz和局部坐標系O1-x1y1z1完全平行,星體連接桿CO和虛擬桿BO都在xz平面,因而投影至平面表征出如圖4所示的雙桿件連接結構。在圖4情況下,O點的裝配位置誤差由桿件BO、CO的桿長誤差與鉸鏈連接處B、C的位置誤差造成。因此,O點位置誤差可以表示為
ΔO=μ1Δl+μ2ΔB+μ3ΔC
(11)
式中:ΔO表示O點位置誤差;Δl=[Δl02,Δl0]T,Δl02、Δl0分別為BO、CO的桿長誤差;ΔB=[ΔzB,ΔxB]T,ΔzB、ΔxB分別表示B在全局坐標系下沿z軸、x軸的位置誤差;與ΔB類似,ΔC=[ΔzC,ΔxC]T表示鉸鏈C處的位置誤差;μ1、μ2、μ3分別為相應誤差系數矩陣,且定義如下
(12)

圖5 系數矩陣部分表達式計算原理圖

(13)
通過構造與圖5相似的結構可以求解系數矩陣的其它比值,由此得到的3個系數矩陣具體為
(14a)
μ2=
(14b)
μ3=
(14c)
式中:α、β、γ為名義尺寸下各鉸接點所組成三角形的內角;ε為BC連線與z軸負方向的夾角。
需要特別指出的是,利用式(11)求解O點的裝配位置誤差時,兩個90°鎖定鉸鏈理論安裝位置的幾何對稱中心B點作為基準點,其裝配誤差為0。另外,虛擬桿件BO在理想條件下的矢量表達式為
l02=r+l01
(15)

(16)

Δl02=((rx+Δx-l01)2+(ry+Δy-δzl01)2+
(17)
將式(17)(14)帶入式(11),可計算出O點的裝配誤差。注意到ΔO只在xz平面,不影響繞x方向和z方向的轉動偏差,而所引起空間可展機構繞y軸的轉動偏差為
ξy=‖ΔO‖/l02
(18)
利用線性疊加,綜合式(10)(18),得到考慮所有桿長誤差與鉸鏈安裝位置誤差的空間可展機構幾何裝配精度模型
(19)
式中:ΔP=[Tx,Ty,Tz,Rx,Ry,Rz]T,為全局坐標系下空間可展機構的位姿誤差。
3 靈敏度分析
由于在實際裝調過程中,可展機構繞y軸的偏擺誤差通常更難以滿足設計要求。因此,下面著重分析各誤差因素對可展機構y軸姿態誤差的影響,而其余的靈敏度分析可據此類推。
3.1 桿長誤差影響系數
基于空間可展機構幾何裝配精度模型,由式(19)的位姿誤差與誤差源的函數關系,可分離出到可展機構y軸偏擺誤差與各項誤差的關系,即
Ry=δy+ξy
(20)

(21)

(22)
式中:J1i,…,J6i為誤差傳遞矩陣J各行第i列的值。
另外,從式(10)可知,ΔV=[Δx,Δy,Δz,δx,δy,δz]T均是桿長誤差Δli(i=1,2,3,4,5,6)的函數。從式(17)可以看出Δl02是ΔV的函數。以此推出,Δl02也是Δli(i=1,2,3,4,5,6)的函數。于是,式(17)兩邊對桿長誤差Δli求偏導有
(23)
(24a)
i=1,2,3,4,5,6
(24b)

令
(25)
綜合式(23)(24)(25),各項桿長誤差對天線面板y軸偏擺誤差影響的靈敏度表達式如下
(26)
3.2 鉸鏈安裝位置誤差影響系數
類似地,按照推導桿長誤差影響系數的思路,利用式(11)和式(20),可以得出C處鉸鏈安裝位置誤差對天線面板繞y軸偏擺誤差影響的靈敏度表達式如下
(27a)
(27b)
除C處鉸鏈外,天線面板上Aj(j=1,2,3,4,5,6)處鉸鏈同樣存在安裝位置誤差。為簡化表達,以Δajk(j=1,2,3,4,5,6;k=x,y,z)表示Aj處鉸鏈在k方向的安裝位置誤差。由式(10)(17)可知,Δl02也是Δajk的函數,進而對表達式(17)進行相應鉸鏈安裝位置誤差取偏微分,可以得到
(28)
在此基礎上,構建映射關系:當k=x時,n=1;當k=y時,n=2;當k=z時,n=3。令m=3(j+1)+n(j=1,2,3,4,5,6;n=1,2,3),利用式(20),推導出天線面板處鉸鏈安裝位置誤差對天線面板繞y軸偏擺誤差影響的靈敏度表達式如下
(q3J5m-q4J6m+q5J1m+q6J2m+q7J3m)
(29)
式中:J1m,…,J6m為誤差傳遞矩陣J各行第m列的值。
至此,式(27)和式(29)完全表達了各鉸鏈安裝位置誤差對天線面板y軸偏擺誤差影響的靈敏度。
4 案例分析
某星載SAR天線空間可展機構的具體尺寸如表1所示,天線陣面長為2.22 m,寬為1.65 m。為保障衛星正常服役所需的電性能,在地面裝配中,特別要求天線面板俯仰角與方位角均優于0.020°,該精度指標對應本模型中的y軸偏角(Ry)與x軸偏角(Rx)。

該機構屬于精密桿系機構,桿件加工精度等級取11級,中撐桿的半公差帶寬為0.66 mm,其余桿件的半公差帶寬均為1.10 mm。實際裝配過程中,鉸鏈安裝位置誤差在3個坐標方向上均不超過0.20 mm。在上述相應誤差范圍內,給定5組如表2所示的桿長誤差和鉸鏈安裝位置誤差。運用MATLAB編寫幾何裝配精度分析程序,根據式(19)計算出裝配誤差,結果詳見表3。

表2 桿長與鉸鏈安裝位置誤差值

表3 空間可展機構位姿誤差
從表2與表3可以看出,在誤差組1、2、3作用下,天線面板繞y軸方向的偏擺誤差(Ry)均大于0.02°。這說明,即使桿長誤差滿足設計要求,鉸鏈安裝符合工藝要求,依舊無法完全保證天線面板的指向精度。為進一步反映桿件動態調整過程,在誤差組1的基礎上,只調整支撐桿件長度而保持鉸鏈安裝位置誤差不變,依據誤差組1、3、5的計算結果,注意到Rx始終在允許范圍內,而Ry從0.072 3°到0.021 4°再到0.007 5°,因此逐漸滿足裝配精度要求。較誤差組3而言,誤差組4全面調整了安裝位置誤差,誤差組5僅微調內撐桿Δl5與星體桿Δl0的尺寸,兩種方法均獲得了理想的裝配精度。由此可見,在滿足桿件加工精度和鉸鏈安裝精度條件下,盡管調整鉸鏈安裝位置也能限制天線面板的裝配誤差,但考慮到裝調時間和裝調難度,調整桿長不失為更合理的選擇。另外,從表3還可以看出,上述誤差作用下的天線面板沿y軸方向的位移偏差(Ty)幾乎為0,且繞z軸方向偏擺誤差(Rz)的絕對值不超過0.001°,這符合平面天線空間展開機構完全展開狀態下的結構特征。
正如上文分析結果,在實際裝調過程中,工廠也只選擇對桿長加減墊片進行空間可展機構裝配精度的調整。為進一步識別出關鍵桿件以降低裝配難度,依據式(26),計算出各桿長誤差對天線面板繞y軸偏擺誤差影響的靈敏度值,詳見表4。

表4 各桿長誤差對y軸偏擺誤差影響的靈敏度
為了更好地表達誤差參數靈敏度,進行歸一化處理,即
(30)
式中:Si為各誤差源誤差對天線面板y軸偏擺誤差影響的靈敏度,在該數值案例中,即特指桿長誤差對天線面板繞y軸偏擺角度誤差影響的靈敏度。根據表4計算值,對誤差參數靈敏度進行歸一化處理,結果詳見圖6。
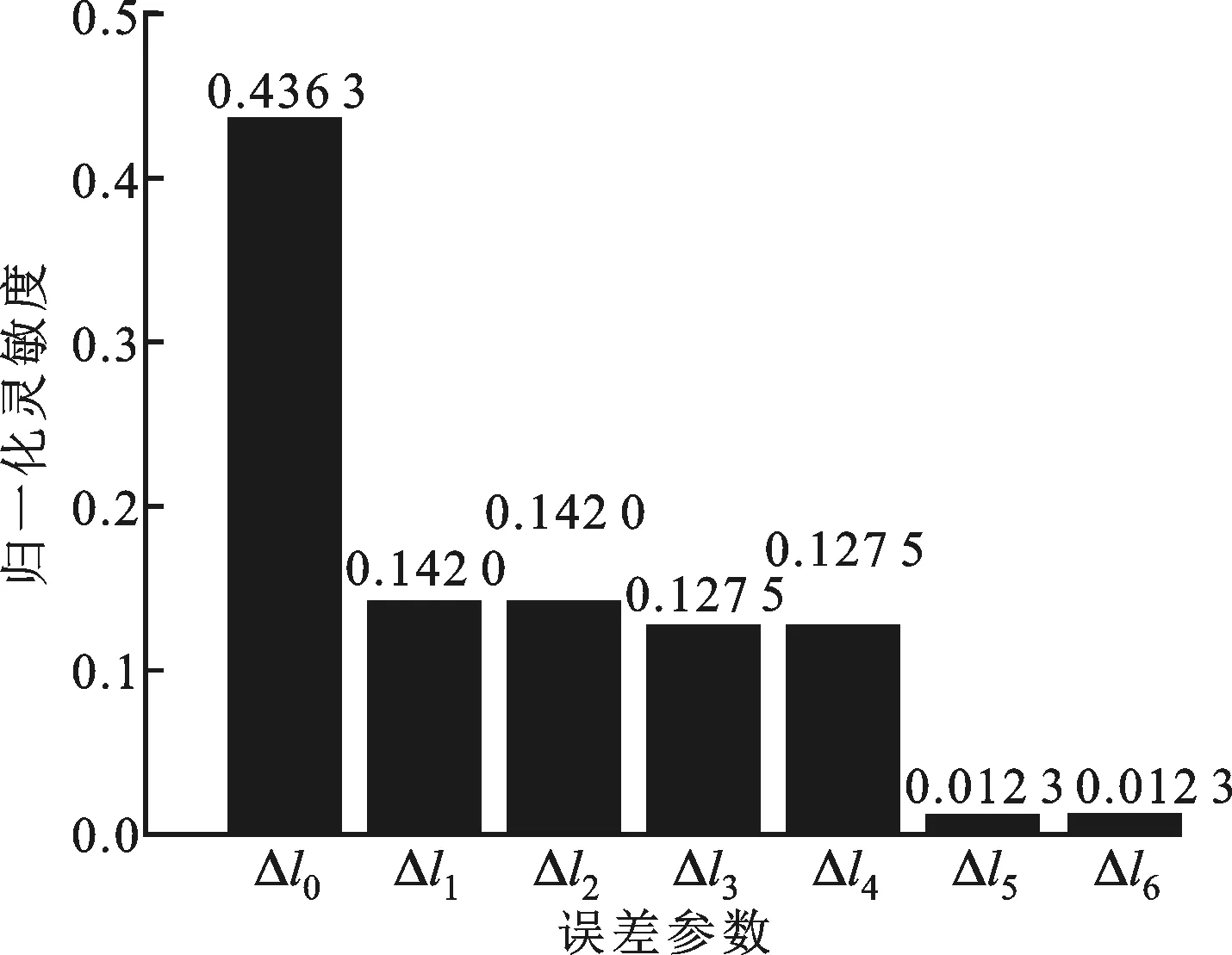
圖6 各參數靈敏度歸一化處理結果
從圖5可知,結構對稱的兩撐桿對天線面板繞y軸偏擺誤差影響程度相同。此外,星體連接桿的長度誤差對天線面板繞y軸偏擺誤差影響最大,兩內支撐桿長度誤差對天線面板繞y軸偏擺誤差影響最小,前者的歸一化敏感度是后者的35.47倍,這意味著調整星體連接桿長度所致使天線裝配精度的變動效果更為顯著。
5 結 論
(1)建立了空間可展機構的幾何裝配精度模型。從空間構型出發,提出了將可展機構等效為6-SPS與雙桿件連接結構的轉化方法,并推導了兩部分結構的裝配誤差表達式。在此基礎上,結合幾何約束,構建了所有桿長誤差與鉸鏈安裝位置誤差等誤差源與天線面板位姿精度的顯式函數關系。
(2)基于可展機構幾何裝配精度模型,利用偏微分法分析了桿長誤差和鉸鏈安裝位置誤差對可展機構y軸偏擺誤差影響的靈敏度,從而能夠有效識別出關鍵誤差,有助于降低裝配難度。
(3)通過星載SAR天線空間可展機構的分析實例,所預測的裝配精度能滿足工程要求,確定星體連接桿為關鍵桿,驗證了空間可展機構裝配誤差建模和靈敏度分析方法的有效性。本文的研究成果對空間可展機構的裝調具有指導意義和參考價值。
