基于脈沖初值的小推力轉移軌道優(yōu)化研究
2019-04-03 02:33:16王旭生施偉璜彭玉明
上海航天 2019年1期
關鍵詞:優(yōu)化
王旭生,施偉璜,王 偉,彭玉明
(1.上海衛(wèi)星工程研究所,上海 201109; 2.上海市深空探測技術重點實驗室,上海 201109)
0 引言
深空探測是當今世界航天活動的熱點研究領域,是一個國家綜合國力和創(chuàng)新能力的體現(xiàn)。我國已將深空探測納入國家重大科技專項,正在實施首次自主火星探測任務,并規(guī)劃了多目標小行星探測、火星取樣返回、木星系及行星穿越等任務。其中,小行星探測任務的總速度增量要求大于8 km/s,由于傳統(tǒng)低比沖的化學推進系統(tǒng)無法使用,因此小推力、高比沖、高可靠的電推進系統(tǒng)成為工程實施的優(yōu)選動力形式。
在小推力作用下,深空探測器的軌道優(yōu)化在本質上是一個最優(yōu)控制問題。目前求解方法主要有直接法、間接法和混合法[1],它們都不可避免地需要進行初值猜測。初值猜測不僅在理論上作為算法的啟動值必不可少,而且在工程應用上也是粗略優(yōu)化的過程,可提供任務可行性、性能指標、各階段大致時間節(jié)點等關鍵信息,為進一步優(yōu)化軌道提供參考。脈沖軌道作為小推力轉移軌道的初值,具有形式簡單、計算方便的優(yōu)點,被廣泛應用于小推力轉移軌道優(yōu)化的求解,如:美國噴氣推進實驗室(JPL)基于圓錐曲線拼接法開發(fā)了MALTO軟件包的初值,采用一系列脈沖替代小推力軌道[2],該方法已應用于木星冰衛(wèi)星軌道器任務的軌道設計中[3];陳揚等[4]基于脈沖估算結果設計了電推進軌道,采用間接法求解燃料最優(yōu)控制問題,得到了小推力的最優(yōu)軌跡;李九天[5]提出了基于小推力可實現(xiàn)性的脈沖軌道約束,研究了基于該約束的燃料最優(yōu)脈沖轉移軌道設計方法;蔣小勇等[6]提出了一種基于多沖量能耗估算的任務窗口搜索方法,可用于搜索小推力任務的發(fā)射窗口。以上研究均基于單一形式的脈沖初值,在工程應用中未考慮脈沖軌道的多樣性,缺少對不同形式的脈沖初值與小推力優(yōu)化結果之間影響關系的分析。
本文基于小行星探測任務,以燃料最優(yōu)為性能指標,提出了一種采取粒子群優(yōu)化(PSO)和序列二次規(guī)劃(SQP)的組合優(yōu)化算法,可適應于不同形式的脈沖初值輸入,并保證收斂性;設計了地球1∶1共振近地小行星2016HO3交會任務的小推力轉移軌道,給出了軌道設計參數(shù);對比分析了可用于小推力轉移軌道優(yōu)化初值結果的3種典型脈沖軌道,討論了不同脈沖初值對小推力轉移軌道優(yōu)化結果的影響。
1 小推力轉移軌道優(yōu)化問題
在日心黃道慣性坐標系下,探測器典型的二體動力學方程為
(1)
式中:r,v為探測器的位置矢量和速度矢量;U為發(fā)動機的推力矢量,U=[FxFyFz];m為探測器的瞬時質量;Isp為發(fā)動機比沖;f為除發(fā)動機推力加速度之外的攝動加速度;g0為海平面重力加速度。r,v,m為狀態(tài)變量,X=[rvm]。將式(1)簡寫為
(2)
將小推力軌道優(yōu)化問題轉換為尋找最優(yōu)控制函數(shù)U(t),并使性能指標
J=J(tf,Xf)
(3)
達到最小,同時滿足動力學方程約束條件、初末狀態(tài)約束條件、路徑約束條件,即
(4)
X(t0)=X0,X(tf)=Xf
(5)
ψ(U(t))≤0
(6)
2 優(yōu)化數(shù)學模型
小推力軌道優(yōu)化問題的最優(yōu)控制描述形式會引入無明顯物理意義的協(xié)態(tài)變量,導致收斂域窄,造成初值猜測困難[7]。本文基于直接法的離散思想,建立非線性規(guī)劃(NLP)形式的小推力轉移軌道優(yōu)化數(shù)學模型。以離散節(jié)點的中點作為強制匹配點,將微分方程約束轉化為殘差形式的等式約束。
將整個飛行時間分為N個時間段,各節(jié)點處的時刻為
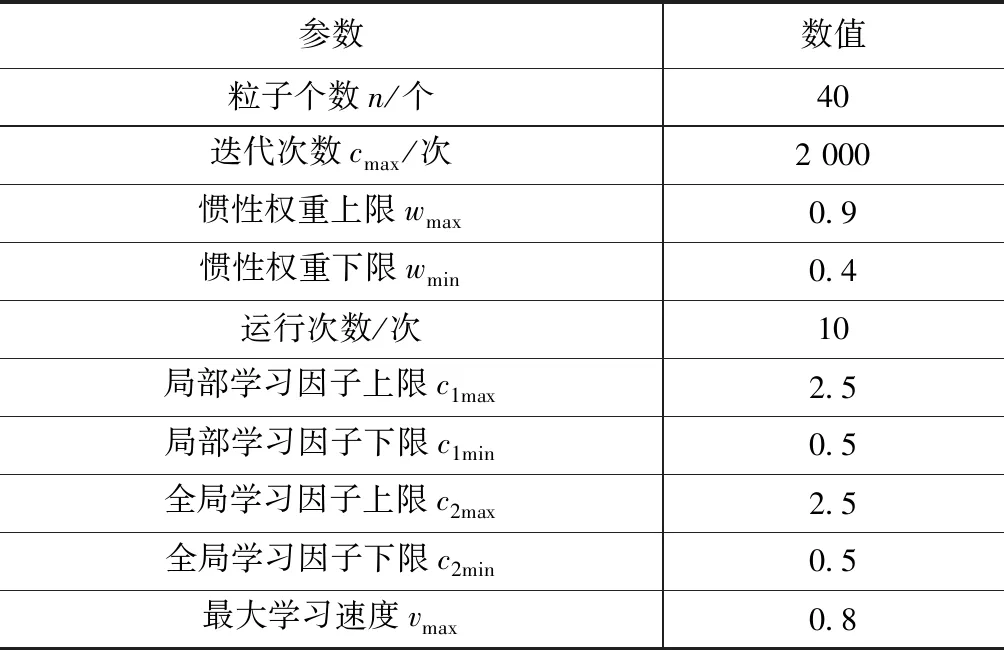
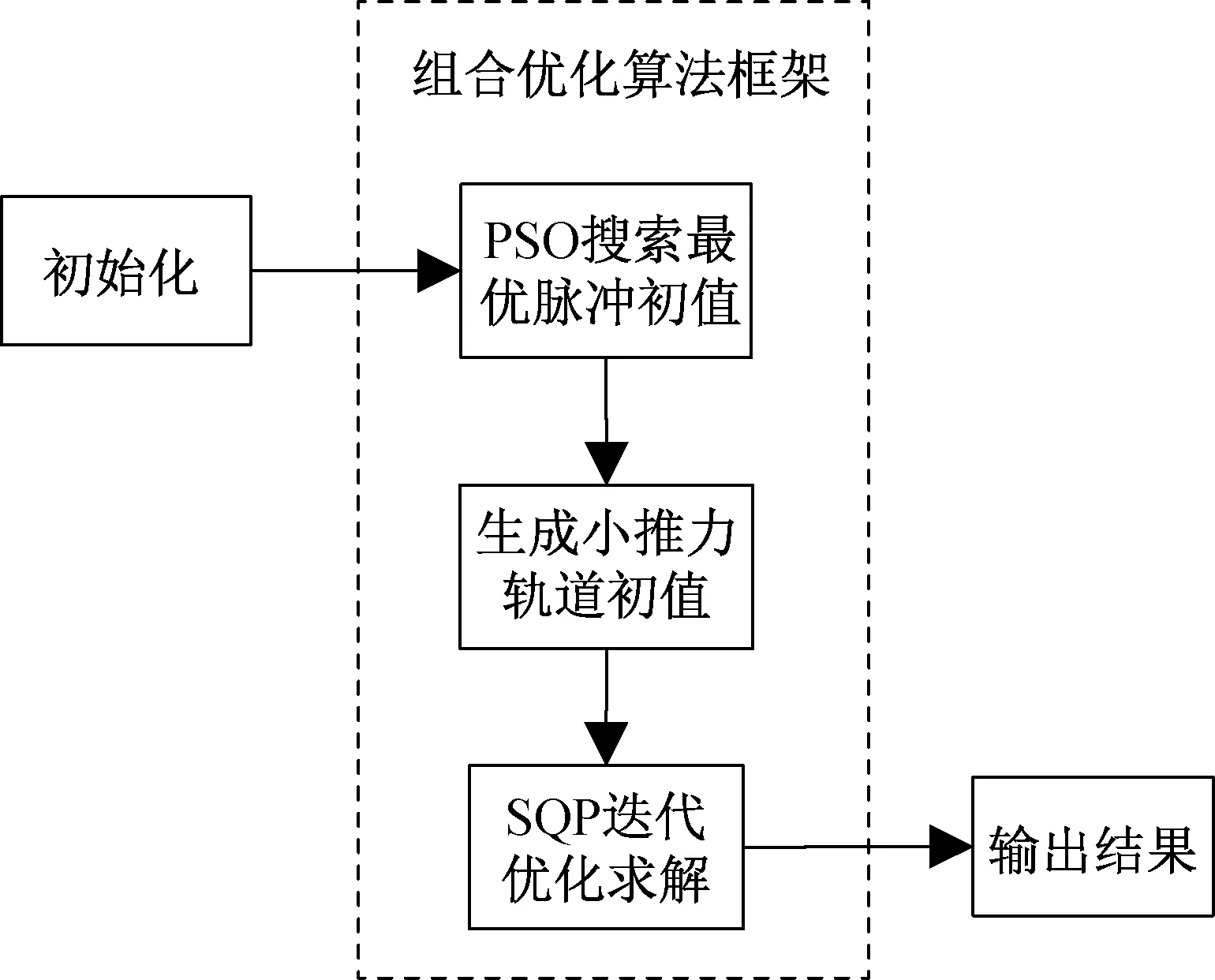
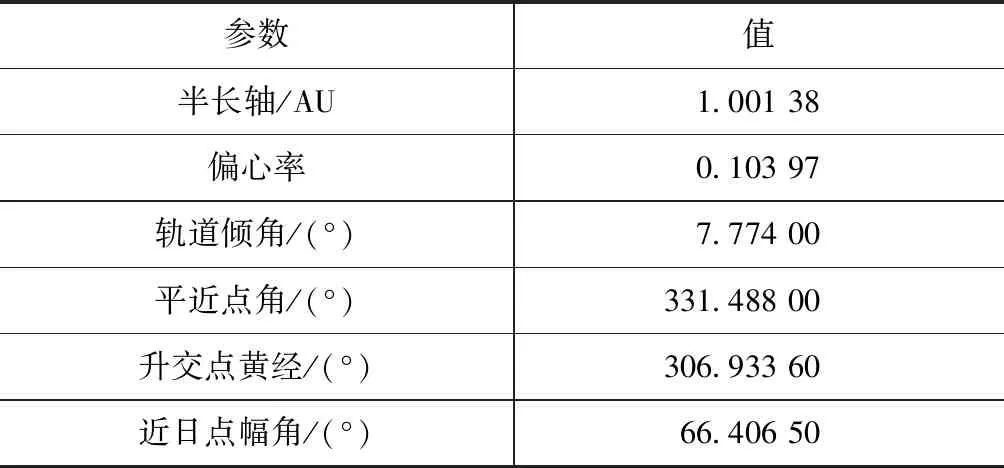
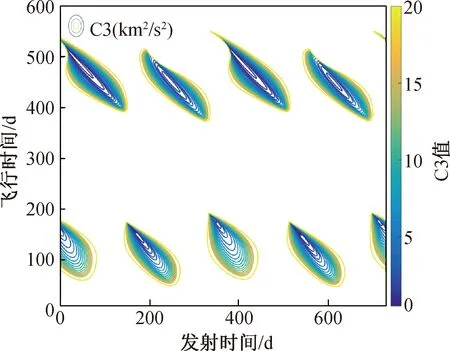
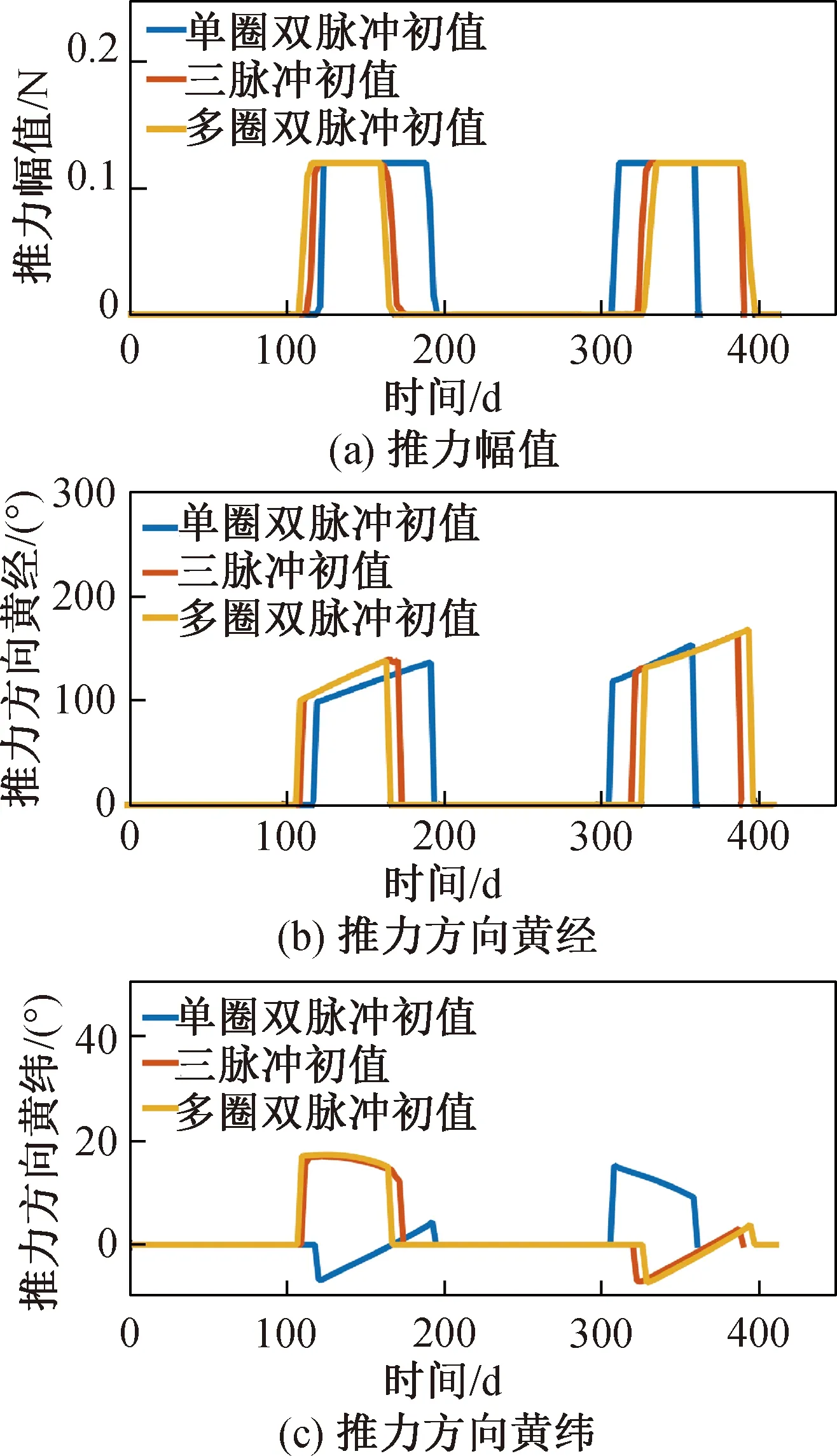
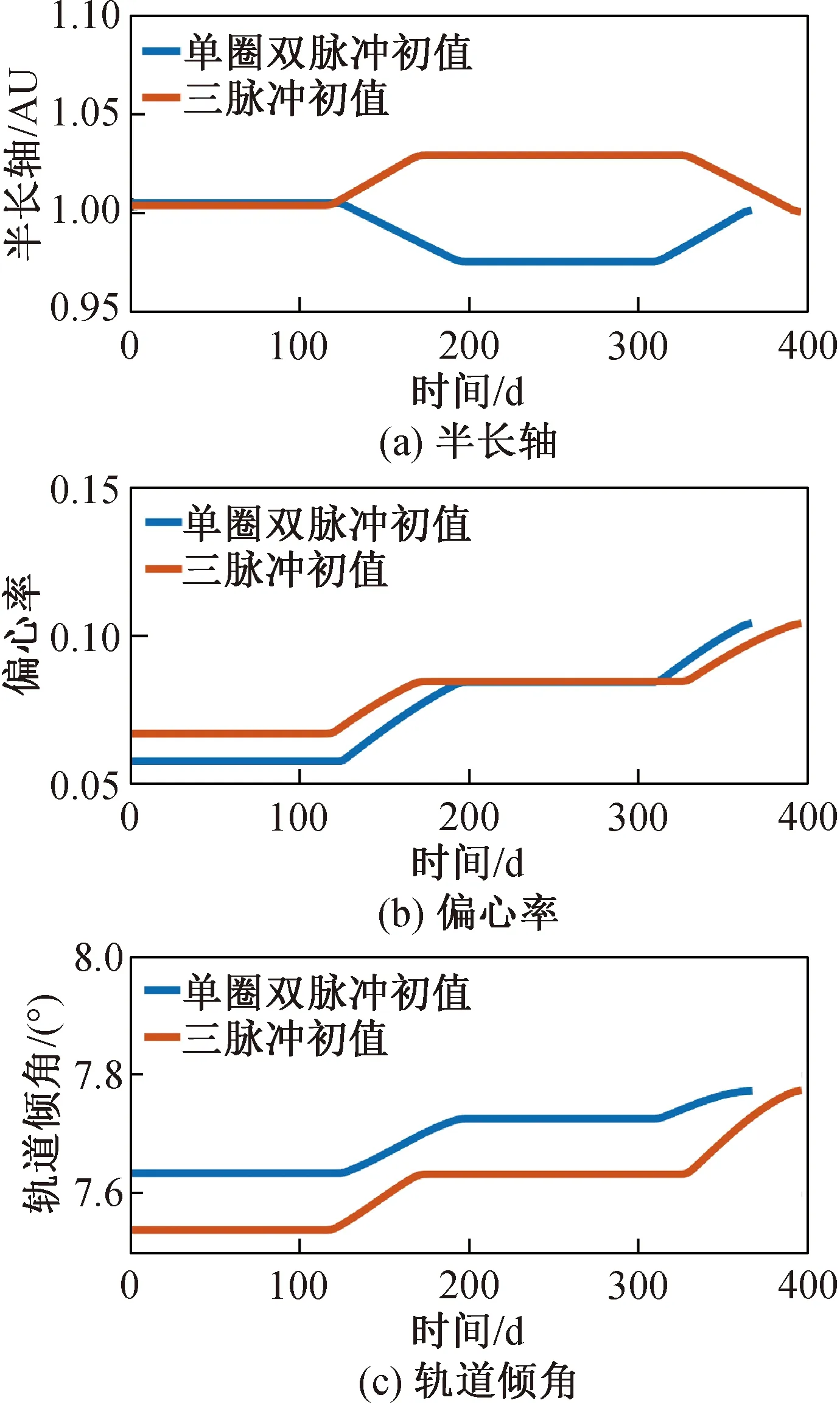
t0 (7) (8) 則S∈[0,1]。對狀態(tài)變量進行三階Hermite插值,控制變量采用線性插值。以x代表狀態(tài)變量的任一分量,則 x=C0+C1S+C2S2+C3S3 (9) (10) (11) (12) 對于狀態(tài)變量中任一分量均可執(zhí)行上述操作。至此,連續(xù)的動力學方程約束轉化為離散的7N個等式約束。 在離散形式下,初始狀態(tài)與終端狀態(tài)分別與出發(fā)天體和到達天體的位置速度相同,即 (13) 給定出發(fā)時間和到達時間,通過查找星歷獲取出發(fā)、到達天體的位置速度。末端質量自由,初始質量為發(fā)射質量,假設發(fā)射質量為m0,則 m(t0)=m0 (14) 離散形式的路徑約束為各節(jié)點處的推力值小于等于最大推力值Fmax,即 ‖U(ti)‖≤Fmax (15) 以燃料最優(yōu)為指標,將離散形式表示為 (16) 至此,小推力轉移軌道問題優(yōu)化的數(shù)學模型完成建立。尋優(yōu)變量Z={t0,tf,X0,…,XN,U0,…,UN},優(yōu)化指標為式(16),約束條件為式(12)~(15)。其中,約束條件和性能指標可根據(jù)具體情況進行相應修改。 傳統(tǒng)PSO算法具有全局優(yōu)化和并行計算的能力,相比于經(jīng)典的基于梯度的優(yōu)化算法具有更好的全局收斂性[9],但PSO算法出現(xiàn)早熟現(xiàn)象的概率較大,以致收斂于局部最優(yōu)解。為此,本文通過線性減小慣性權重系數(shù)和局部學習因子,增大全局學習因子,使算法在初期具備較強探索能力,在后期又有較好的收斂性,使其在最優(yōu)解附近精細搜索。本文算法主要包括以下步驟。 1) 初始化粒子群位置p和速度v,粒子位置信息包含脈沖作用時刻和脈沖作用矢量。 2) 對每個粒子用構造的位置函數(shù)Fitness進行評價,此時Fitness為總速度增量。 3) 更新每個粒子的歷史最優(yōu)位置pb和群體的全局最優(yōu)位置gb。 4) 分別按照式(17),(18)更新每個粒子的速度和位置,其表達式為 vi+1=w·vi+c1·rand()·(pb-p)+ c2·rand()·(gb-pb) (17) pi+1=pi+vi+1 (18) 式中:w為粒子的慣性權重系數(shù);c1為局部學習因子;c2為全局學習因子;rand()表示0~1的隨機數(shù)。同時設置粒子學習速度在[-vmax,vmax]內(nèi),若更新后的速度超出邊界,則取相應的邊界值。w,c1,c2的更新依據(jù)為 (19) (20) (21) 式中:c為運行代數(shù);cmax為最大運行代數(shù)。 5) 判斷終止循環(huán)條件。若條件不滿足,則循環(huán)執(zhí)行步驟2~4;若滿足,則輸出結果,生成初值Z0={t0,tf,X0,…,XN,U0,…,UN}0。其中,{t0,tf}和{X0,X1,…,XN}中的位置和速度分量可直接從結果中生成,質量可基于其消耗特性按等差遞減生成;{U0,U1,…,UN}0可在[0,F(xiàn)max]內(nèi)隨機猜測。為避免隨機性對結果帶來的影響,Ui0=Fmax[0.5, 0.5, 0.5]。算法相關參數(shù)設置見表1。 表1 粒子群算法參數(shù) SQP算法是求解NLP問題的有效算法[10],但SQP算法是基于可行方向搜索的一種約束優(yōu)化方法,其只具有局部優(yōu)化能力,因此將SQP與PSO算法結合可充分發(fā)揮兩者優(yōu)勢。算法的主要步驟如下。 1) 給定PSO算法搜索后生成的初值Z0,選定正定矩陣H0。 2) 求解的二次規(guī)劃問題為 mindT s.t. con(Zk)+dTcon(Ζk)≤0 (22) 式中:obj為目標函數(shù);con為約束;dk為搜索方向,當‖dk‖<10-6時,迭代結束。 3) 更新Zk+1=Zk+αkdk,其中αk由線性搜索確定。 4) 修正Hk,使Hk+1保持正定。 5) 判斷是否滿足迭代終止條件:若迭代次數(shù)超過2 000次或‖dk‖<10-6,則迭代結束;否則重復步驟2~4。 為便于計算,初值生成過程和優(yōu)化求解過程的尋優(yōu)變量均進行歸一化處理。組合優(yōu)化算法的流程如圖1所示。 圖1 組合優(yōu)化算法流程Fig.1 Combinatorial optimization algorithm flow 2016HO3是2016年發(fā)現(xiàn)的1顆阿波羅型地球1∶1共振近地小行星,其日心軌道周期與地球公轉周期呈現(xiàn)1∶1的關系。雖然2016HO3為繞日小行星,但是其相對地球的軌道較穩(wěn)定,因此被稱為地球的第2個月亮。該小行星具有獨特的探測價值,是我國小行星探測任務的首要備選目標,其軌道參數(shù)見表2。表中:AU為天文單位;MJD為約化儒略日。 分析不同初值對優(yōu)化結果的影響。假設探測器的發(fā)射質量為1 500 kg,發(fā)射日期在2022年1月1日至2024年1月1日之間,飛行時間小于700 d。發(fā)射C3(離開地球引力影響球時與地球相對速度的平方)不大于20 km2/s2,2016HO3交會任務的發(fā)射C3等高線如圖2所示,發(fā)射時間從2022年1月1日開始。由圖可見:若僅從發(fā)射C3的角度考慮,則每年有4個發(fā)射窗口,平均每季度出現(xiàn)1次波谷,分為長轉移和短轉移,兩者交替出現(xiàn)。其中,長轉移時間約為380~550 d,短轉移時間約為50~200 d。 表2 2016HO3小行星軌道參數(shù)(MJD=58 000.0) 圖2 發(fā)射C3等高線Fig.2 Contour line of launch C3 假設小推力大小為120 mN,發(fā)動機比沖為3 500 s,推力大小和方向可調(diào)。選取單圈雙脈沖、三脈沖、多圈雙脈沖3種典型的脈沖初值軌道。將轉移軌道等時間間隔離散為150個軌道段,經(jīng)PSO算法搜索后的初值軌道參數(shù)及經(jīng)SQP算法優(yōu)化后的小推力軌道參數(shù)見表3,由表可得: 1) 3種初值軌道優(yōu)化后得到了2022年11月29日和2022年5月28日這2個發(fā)射窗口,其中三脈沖初值和多圈雙脈沖的初值總速度增量差距最大,但優(yōu)化結果最為接近。 2) 優(yōu)化軌道和初值軌道的發(fā)射時間與飛行時間具有強耦合關系,提供的初值飛行時間越長,優(yōu)化得到的結果飛行時間也越長。SQP算法只是局部優(yōu)化,因此優(yōu)化軌道與初值軌道的飛行時間非常接近。 表3 2016HO3小行星交會任務軌道優(yōu)化結果 3) 3種形式的脈沖轉移軌道總速度增量差距最大達58%,而3種小推力轉移方案燃料消耗差距不超過6%。由此可見,本文算法對初值的敏感度小,具有一定的全局優(yōu)化能力。 各初值對應的小推力轉移軌道的控制曲線如圖3所示。圖中,推力方向以黃經(jīng)、黃緯表示。 圖3 不同初值的最優(yōu)控制Fig.3 Optimal control curves of different initial values 由圖3可見: 1) 小推力發(fā)動機基本符合滿推或關機的形式,即為Bang-Bang控制的小推力軌道最優(yōu)控制形式[11]。 2) 最優(yōu)小推力轉移軌道總體上存在2個主推進段,不同的脈沖軌道初值對應的最優(yōu)控制曲線的差異主要體現(xiàn)在推力器開關機時刻的不同上。 3) 對于不同初值對應的優(yōu)化結果,其推力方向的變化在相位上有明顯差別,可看出2個發(fā)射窗口對應2種推力變化形式。 4) 從飛行時間來看,多圈雙脈沖初值優(yōu)化得到的小推力轉移方案在第2個推進段關機后有約10 d的自由飛行段。由此可見,三脈沖初值具有更優(yōu)的性能。 圖4 燃料最優(yōu)小推力轉移軌道根數(shù)變化Fig.4 Time histories of fuel-optimal low-thrust transfer orbital elements 單圈雙脈沖初值和三脈沖初值對應的小推力轉移軌道根數(shù)變化過程如圖4所示。由圖可見:對應于日期為2022年11月29日的發(fā)射窗口,發(fā)動機的工作序列為“先長后短”;對應于日期為2022年5月28日的發(fā)射窗口,發(fā)動機的工作序列為“先短后長”。11月的發(fā)射窗口與5月的發(fā)射窗口相比,當探測器從地球出發(fā)時,前者為小偏心率大軌道傾角,后者為大偏心率小軌道傾角。從半長軸變化趨勢來看,前者為先減小后增大,后者為先增大后減小。 為解決小推力軌道優(yōu)化未考慮脈沖初值多樣性的問題,利用不同形式的脈沖軌道初值對小推力轉移軌道優(yōu)化結果的影響進行了研究,提出了能適應不同脈沖初值的組合優(yōu)化算法,以我國深空探測規(guī)劃背景任務中的小行星探測任務為例進行了仿真分析。針對近地小行星2016HO3交會任務,以3種典型的脈沖軌道優(yōu)化得到了3種具體的小推力轉移軌道方案和2個發(fā)射窗口。其中,三脈沖軌道初值與多圈雙脈沖軌道初值對應的優(yōu)化結果主要體現(xiàn)在開關機時刻的不同,單圈雙脈沖初值與三脈沖初值、多圈雙脈沖初值的優(yōu)化結果主要體現(xiàn)在推力方向變化的差異,3種初值軌道對應最優(yōu)小推力軌道燃料消耗量差距不超過6%。研究結果表明:本文算法對初值的敏感度低,能收斂于Bang-Bang最優(yōu)控制形式;不同初值對小推力軌道的整體性能指標影響較小,但開關機時刻和推力方向的變化會產(chǎn)生較大差異,從而得到不同的最優(yōu)控制曲線。該研究成果對小推力軌道優(yōu)化初值的選取、我國未來小行星探測任務的工程實施具有一定的參考價值。由于本文未對2個窗口的控制策略進行優(yōu)劣性分析,且優(yōu)化模型僅以燃料消耗作為評價指標,未考慮軌道設計中飛行時間、控制誤差、多體模型等其他重要參考因素,因此后續(xù)將綜合考慮多種評價指標,進一步優(yōu)化設計。

3 基于PSO和SQP的組合優(yōu)化算法
3.1 PSO算法搜索脈沖初值
3.2 SQP算法求解NLP問題
4 近地小行星2016HO3交會任務

5 結束語
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45