基于低軌衛星增強的非差高精度導航定位技術與在軌試驗驗證
2019-04-03 05:53:46梁爾濤施偉璜鄧成晨鄭永艾
上海航天 2019年1期
關鍵詞:信號
梁爾濤,張 偉,施偉璜,鄧成晨,彭 攀,鄭永艾
(上海衛星工程研究所,上海 201109)
0 引言
受各種誤差影響,全球導航系統(GPS)在無增強信息下的單點定位精度約為10 m,精度不高造成其應用在許多領域受到限制。隨著智能駕駛、無人機配送、高精度測繪、精密農業等領域對定位精度需求的提高,為實現分米級,甚至厘米級定位精度,國內外對導航定位精度改善方法的研究愈加深入。利用基準站的差分技術是目前最成功的方法之一。基于差分技術的連續運行參考站系統(CORS)的用戶定位精度優于5 cm,但因其定位誤差會隨用戶與基準站間距離的增大而增大,故其應用范圍受到很大限制。此外,差分技術依賴于基準站,無法服務于海洋等區域。在全球導航衛星系統服務組織(IGS)提供GPS衛星的精密星歷、精密鐘差后,不依賴基準站的非差精密單點定位技術的定位精度得到顯著提高,成為高精度定位技術的發展方向[1-5]。
與傳統廣域增強系統(WAAS)利用高軌衛星轉發改正信息進行增強相比,低軌導航增強系統不僅進行增強信息的轉發,還發送一路類偽碼信號進行信號增強,即不僅能實現定位精度的增強,還能實現導航完好性和可用性的增強,也就是信息信號的一體化增強。地面導航用戶接收增強信號后,利用基于自適應卡爾曼濾波的精密單點定位實現廣域快速非差高精度定位。本文在技術研究基礎上研制了低軌導航增強試驗載荷和地面導航試驗終端。低軌導航增強試驗星于2017年11月15日在太原衛星發射中心發射成功。經在軌測試,地面導航試驗終端在星基增強下實現了定位精度從10 m到30 cm的飛躍,滿足智能駕駛、精密農業等應用領域對導航定位精度的需求。
1 低軌星基導航增強技術
低軌導航增強技術依托低軌星基導航增強系統實現。低軌星基導航增強系統由空間段、地面段和用戶段3部分組成,如圖1所示。
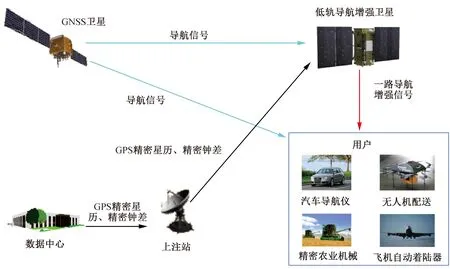
圖1 低軌星基導航增強系統Fig.1 LEO satellite-based navigation augmentation system
空間段主要為低軌導航增強衛星。空間段可接收地面上注的GPS精密星歷和GPS精密鐘差,直接接收GPS導航信號,實現實時高精度定軌與時間同步,打包導航增強電文,完成下行廣播。
地面段包括數據處理中心和上注站。數據處理中心通過IGS網站實時獲取GPS精密星歷和GPS精密鐘差,完成上注數據包加工;上注站通過上行通道將數據處理中心數據包上注至低軌衛星。
用戶段接收低軌衛星廣播的導航增強信號,完成電文解析,通過基于自適應卡爾曼濾波的精密單點定位軟件完成高精度定位。
2 低軌導航增強信號體制
低軌導航增強信號由250 bit/s的增強導航電文、1.023 Mc/s的擴頻碼和2***MHz的調制載波3部分組成,信號結構如圖2所示。
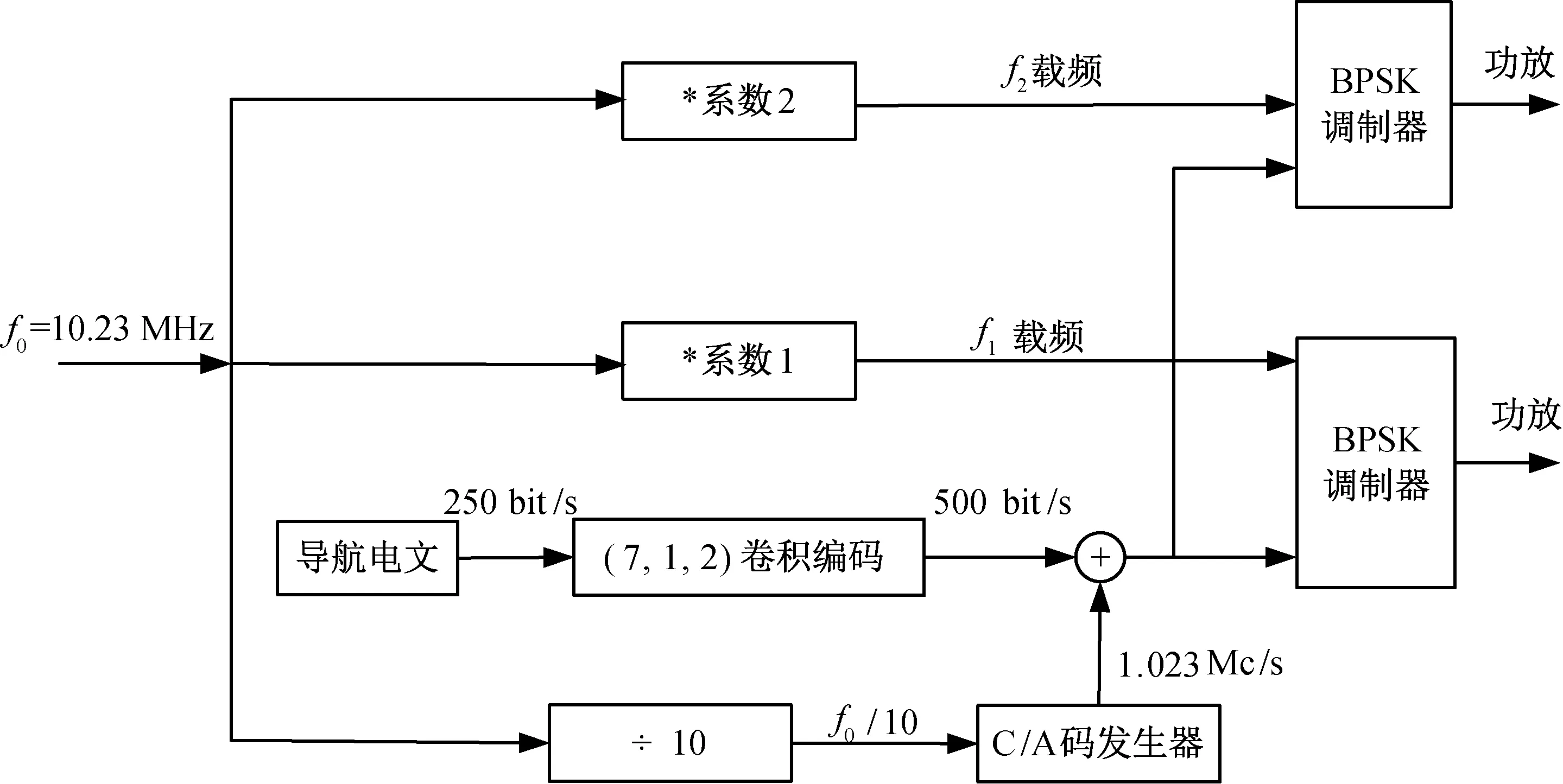
圖2 下發增強信號的信號體制Fig.2 Signal system of downlink augmentation signal
1) 導航電文編碼。數據通道導航電文速率為250 bit/s,內容包括低軌衛星軌道六根數、六根數變化率、IGS發布的GPS精密星歷、IGS發布的GPS精密鐘差等,采用標準的(2,1,7)非系統卷積編碼,編碼后符號速率為500 bit/s。
2) 擴頻碼編碼。擴頻碼速率為1.023 Mc/s,由2個10級移位寄存器產生的m序列G1(t)和G2(t)經模2和產生,其周期碼長為1 023,碼周期為1 ms。G1(t)和G2(t)的特征多項式為
(1)
選用與當前GPS衛星不同的偽隨機噪聲(PRN)碼,并通過設計保證增強衛星的PRN碼與當前GPS衛星的PRN碼具有較好的互相關性。PRN碼生成流程如圖3所示。
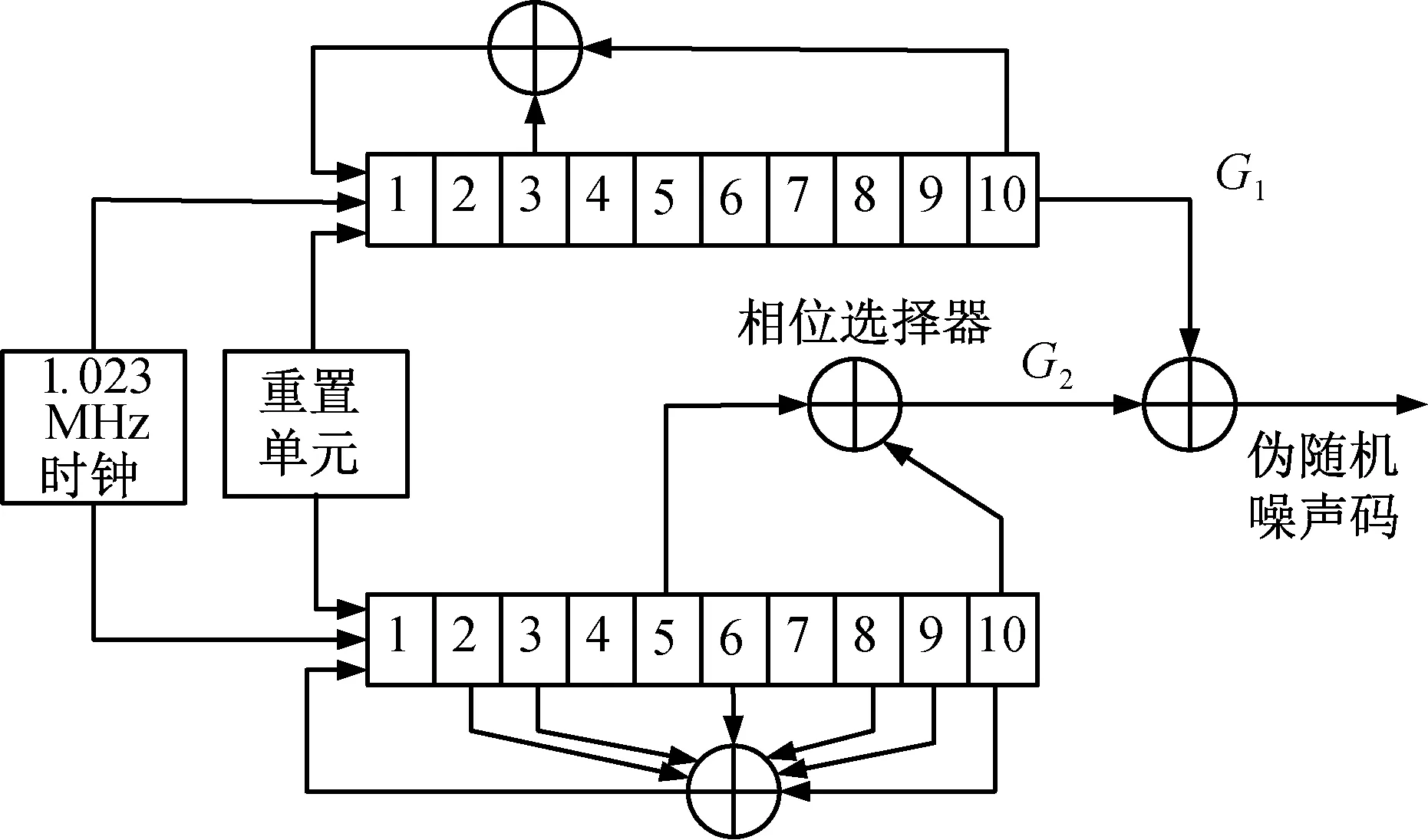
圖3 偽隨機噪聲碼生成框圖Fig.3 Block diagram of generation of PRN code
3) 信號調制。信號采用二進制相移鍵控(BPSK)調制,載波速率與基準速率10.23 MHz滿足整數倍關系。
3 地面自適應卡爾曼濾波高精度單點定位算法模型
地面自適應卡爾曼濾波高精度單點定位算法主要包括4部分:周跳粗差探測修復、精密星歷星鐘插值、各類誤差修正和自適應卡爾曼濾波[6-9]。
3.1 周跳粗差探測修復
受電離層延遲變化、多徑效應等因素影響,接收機觀測數據會出現中斷和信號失鎖。對非差精密單點定位而言,對觀測數據進行周跳粗差探測修復等質量控制是實現厘米級定位的關鍵。周跳粗差探測包括以下2個步驟。
1) 采用電離層殘差組合觀測法探測周跳。電離層殘差組合法將載波相位觀測值進行組合處理,通過對組合值持續監測判斷觀測數據是否出現周跳。載波相位電離層組合觀測值
LI=λ1φ1-λ2φ2=
(2)
式中:CI為電離層影響系數;f1,f2為不同導航信號載波頻率;φ1,φ2為不同頻率上的載波相位觀測值;λ1,λ2為不同頻率載波的波長;N1,N2為不同頻率上相位觀測值的模糊度。LI與接收機到衛星的幾何距離無關,且消除了軌道誤差、鐘差、對流層延遲等所有與頻率無關的誤差項。無周跳時,LI隨時間變化緩慢;有周跳時,LI會出現較為顯著的變化。
2) 采用Melbourne-Wubbena組合探測法探測周跳粗差。Melbourne-Wubbena組合探測法將偽距觀測值和載波相位觀測值進行組合處理,通過對組合值持續監測判斷原觀測數據是否出現周跳粗差。組合觀測值
(3)
假設觀測過程中,載波相位觀測值的中誤差σφ=±0.01周,精密偽距定位中誤差σp=±20 cm,則根據誤差傳播定律
(4)
可得σNΔ=±0.236 。若取4倍中誤差為限差,則Nw的值域為[-0.944,0.944];若Nw不在這個值域內,則表明發生了粗差或周跳。
3.2 精密星歷和鐘差插值
下發導航增強信號中的GPS精密星歷和鐘差為當前時刻前后時間點的精密星歷和鐘差。因此,在進行高精度定位時需進行內插,以得到當前時刻的精密星歷和鐘差。本文采用拉格朗日內插法進行插值,拉格朗日插值函數為
(5)
式中:f(xk)為插值節點處的函數值;lk(x)為n次插值基函數,即
(6)
插值基函數僅與節點有關,不隨函數值f(xk)的改變而改變。
選用2002年10月27日的IGS精密星歷,選擇PRN碼為1的GPS衛星,取01:00:00~05:45:00的X,Y,Z坐標值作為分析對象,采用7~15階拉格朗日內插03:15:00時刻的X,Y,Z值,將其與真值進行對比,得到誤差隨內插階數變化曲線,如圖4所示。由圖可知:當內插階數為9時,精度最高。因此,本文選用9階拉格朗日插值。

圖4 X,Y,Z坐標值插值誤差隨拉格朗日階數變化曲線Fig.4 Change of X, Y and Z interpolation errors along with different interpolation orders
3.3 不同誤差源修正方法
非差精密定位必須考慮修正所有誤差項,主要包括與信號傳播、導航衛星和測站有關的3類誤差。導航衛星星歷和星鐘誤差修正已在3.1節中做過介紹,其余誤差及其修正方法見表1。
3.4 擴展卡爾曼濾波模型
使用擴展卡爾曼濾波進行精密單點定位[10-11],建立濾波狀態和觀測方程為
Xk=Φk,k-1Xk-1+ωk
(7)
Zk=HkXk+vk
(8)
式中:Xk為k歷元狀態向量;Φk,k-1為k-1歷元至k歷元的狀態轉移矩陣;ωk和vk分別為系統噪聲向量和觀測噪聲向量,且均為零均值高斯白噪聲;Zk為k歷元觀測值;Hk為k歷元觀測方程系數矩陣。選取X=[xyzΔtZWDN1N2…Ns],其中:
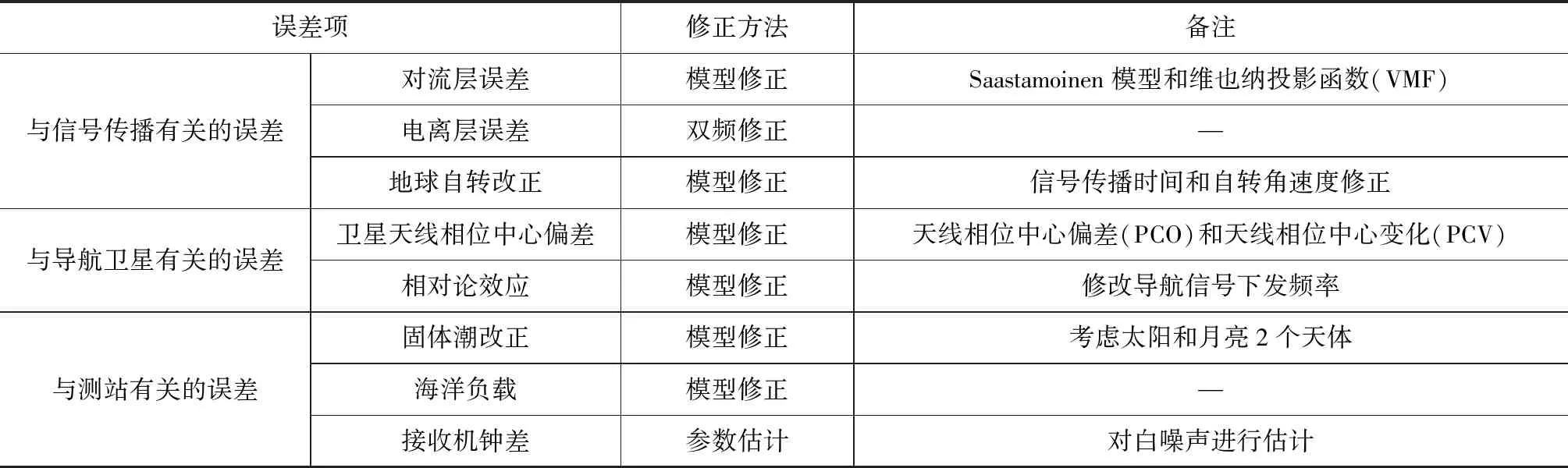
表1 各項誤差及其修正方法
(x,y,z)為接收機位置;Δt為接收機鐘差;ZWD為天頂對流層濕延遲;N為模糊度。
(9)
式中:Qk-1為系統噪聲向量的方差陣。

(10)
式中:Rk為系統量測噪聲的方差陣;I為單位陣。重復上述計算,不斷進行預測和修正,得到用戶接收機位置高精度定位結果。
4 基于低軌增強信號的地面高精度單點定位程序設計
根據上述理論,地面導航終端接收低軌增強信號后進行地面高精度單點定位的流程主要包括數據準備階段、精密星歷和星鐘插值階段、周跳粗差探測階段、誤差修正階段和卡爾曼濾波解算階段。數據準備階段需滿足雙頻GPS衛星數大于4,收到精密星歷和星鐘時刻點大于9。其中:雙頻GPS衛星數大于4是為保證電離層誤差消除和基本衛星導航定位;精密星歷星鐘時刻點大于9是為保證后續拉格朗日插值的插值精度,9階拉格朗日插值為精度最優的方案。具體流程如圖5所示。
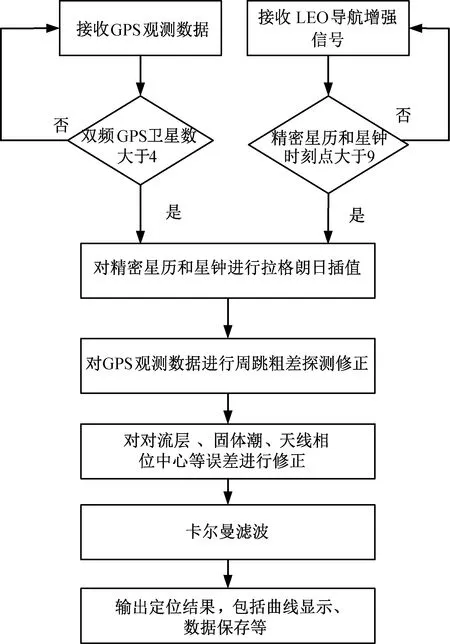
圖5 地面定位程序設計流程Fig.5 Flowchart of ground positioning procedure
5 在軌試驗情況及在智能駕駛領域應用展望
2017年11月15日,低軌導航增強試驗星和“FY-3D”星在太原衛星發射中心發射升空。11月15日至12月5日,進行了導航增強載荷在軌測試工作。相關情況如圖6所示。
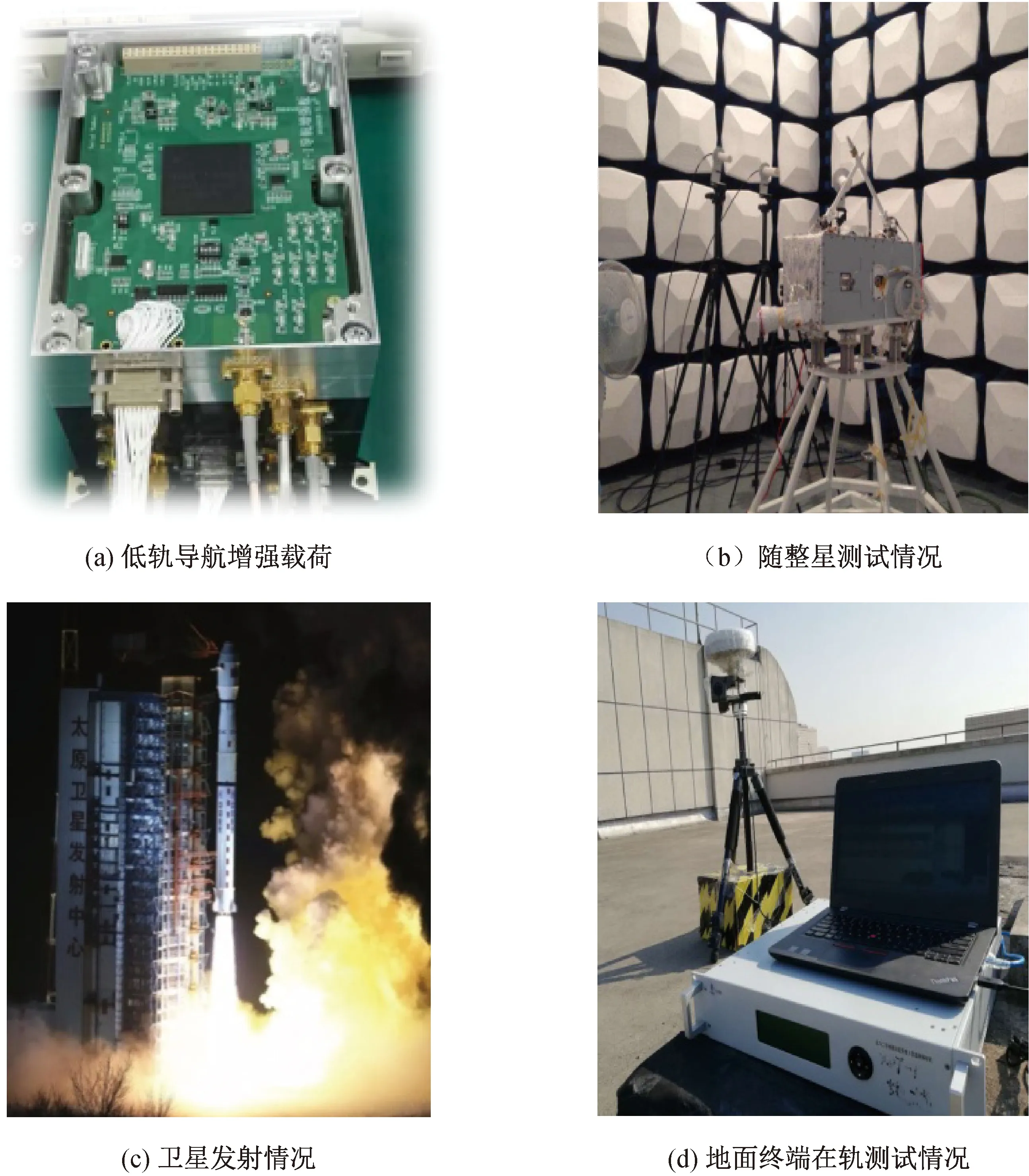
圖6 載荷研制、衛星發射及在軌測試情況Fig.6 Payload development, satellite launch and on-orbit experiment
測試中,地面用戶終端被放置于樓頂空曠處。衛星過境地面站時通過上行通道上注IGS的GPS精密星歷和星鐘。星上導航增強載荷接收處理后下發導航增強信號。地面用戶終端接收增強信號和GPS衛星導航信號。測試點基準值通過實時動態差分(RTK)定標接收機多次測量求平均值獲得。該RTK接收機定位精度優于1 cm。
經測試,地面用戶終端在低軌衛星仰角為5°時可實現增強信號的跟蹤捕獲。在增強定位前,地面用戶終端三軸定位精度約為10 m;接收增強信號進入增強高精度定位后,各軸定位精度均優于0.3 m。三軸定位精度如圖7~10所示。

圖7 增強前后定位誤差曲線Fig.7 Positioning error curves before and after augmentation
由測試可知:地面用戶增強后能實現優于0.3 m的定位精度,其中,X,Y和Z方向上的定位精度存在差異,這主要是由不同方向上對流層、固體潮、多路徑效應等誤差因素影響不同導致。在軌試驗結果表明:低軌導航增強衛星對地導航增強服務可消除當前高精度定位對地基站的依賴,解決廣大無導航基準站覆蓋地區的高精度定位難題。
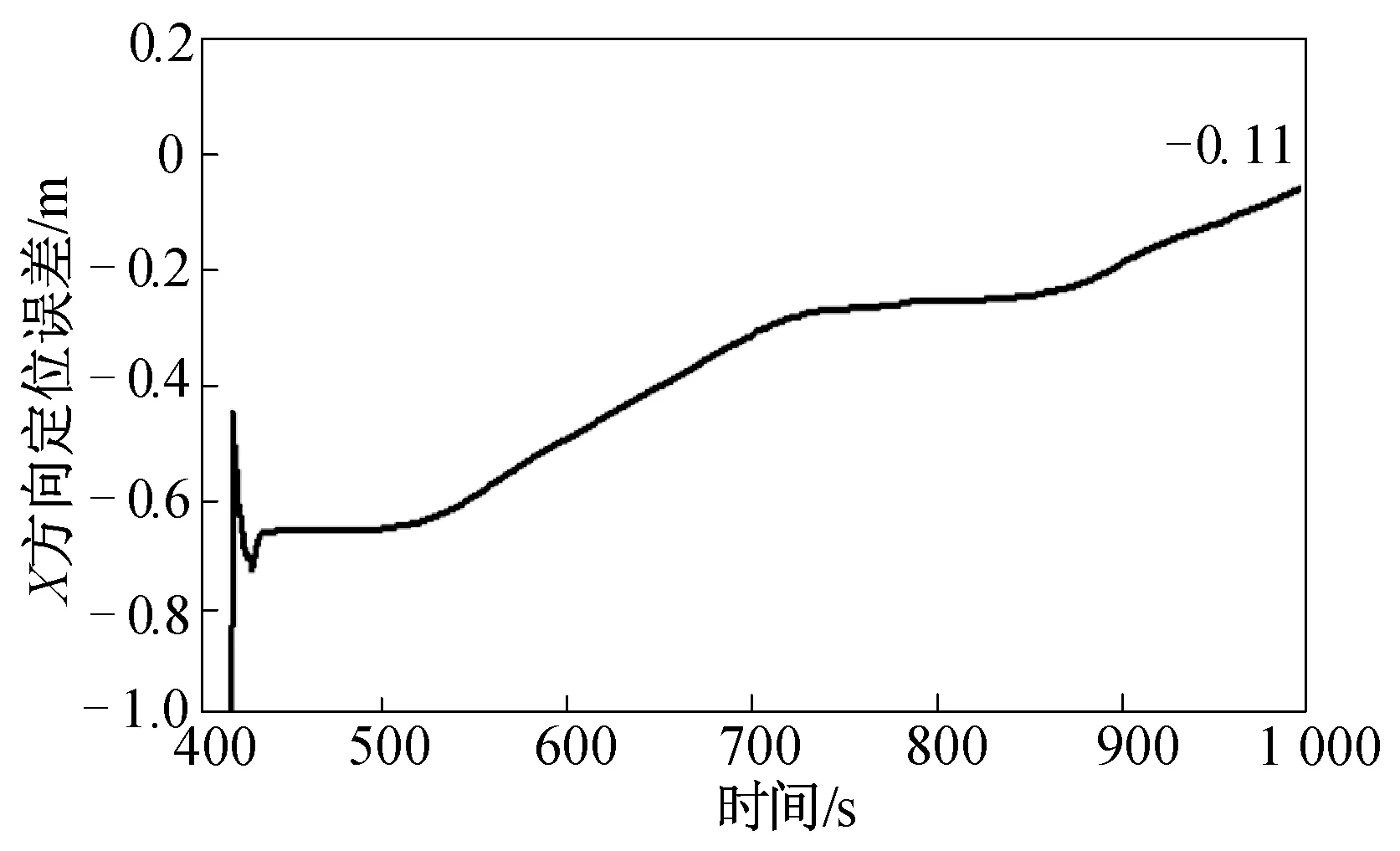
圖8 WGS84坐標系X方向定位誤差情況Fig.8 Error in X direction under WGS84 coordinate system
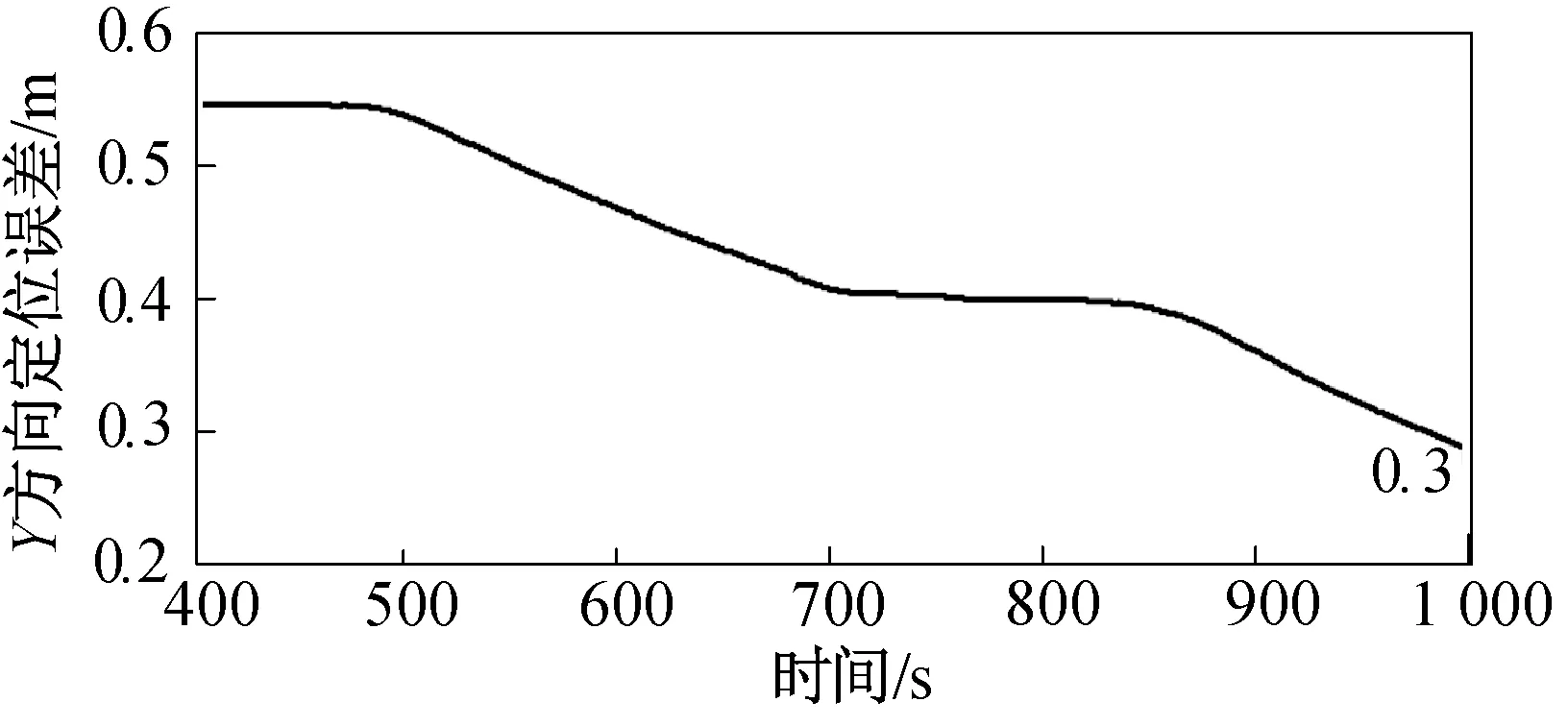
圖9 WGS84坐標系Y方向定位誤差情況Fig.9 Error in Y direction under WGS84 coordinate system
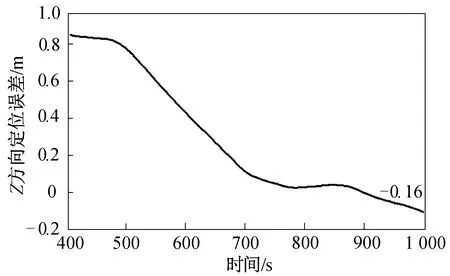
圖10 WGS84坐標系Z方向定位誤差情況Fig.10 Error in Z direction under WGS84 coordinate system
6 結束語
本文提出了一種基于低軌衛星增強的非差高精度導航定位技術,通過導航增強載荷在軌試驗,驗證了低軌衛星對地導航增強原理,初步實現了準實時分米級的高精度定位。后續將進一步優化地面定位算法、誤差修正模型和導航增強載荷硬件設計,實現更高精度定位;進一步提高收斂速度,優化空間段低軌導航星座設計,實現對我國或全球的持續增強服務覆蓋能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06