滾筒式免耕播種機構交互式優化設計系統研究
2019-04-01 12:27:26劉宏新李金龍劉招金
農業機械學報 2019年3期
劉宏新 蘇 航 李金龍 劉招金
(東北農業大學工程學院, 哈爾濱 150030)
0 引言
農業機械設計是農業機械化和現代化的重要內容和步驟,設計水平的高低直接關系到產品的質量性能、研制周期和經濟效益等[1-2]。隨著科技的進步與發展,現代設計技術與隨之產生的設計方法也不斷地融入到農業機械設計中。
傳統的農機設計方法一般是通過經驗獲得設計參數,進行整機設計[3-7]。但由于經驗性和盲目性,往往需要多次修改參數和結構,費時費力。優化設計方法即在符合一系列限制條件的前提下,求出滿足設計效果的設計參數解,使設計效率明顯提高。與此同時在優化設計的過程中,人類經驗知識及創新能力在求解復雜問題時具有不可替代的作用[8-11],這使得交互式優化設計方法成為研究復雜優化設計問題的最佳選擇。張學軍等[12]研究了清田整地聯合作業機齒形刮板式殘膜、殘茬及土壤輸送裝置的結構原理,通過建立數學模型,得到了機構的最優參數組合;韓豹等[13]為獲得理想的苗間機械鋤草效果,結合農藝對機械鋤草參數的限定及要求,建立了多目標優化模型,并使用Matlab優化工具箱得到了最優解;王方艷等[14]使用Matlab,對4H-2型花生收獲機的傳動機構進行了優化分析,以提高機構的工作性能與可靠性。VEGAD等[15]對C型、Hatchet型和L型3種旋耕葉片進行了靜態結構分析,并利用Solidworks程序設計模塊對3種轉子葉片進行了優化研究。近年來約翰迪爾等國外知名農機企業紛紛采用交互式優化設計方法,建立了以PDM/PLM為支撐平臺的產品研發體系和知識積累平臺。
近年來,保護性耕作技術的推廣應用,對農機具的工作性能提出了新的要求[16-20]。為此,東北農業大學研制出了一種以滾筒為特征部件的免耕播種裝置。該裝置采用滾筒碾壓秸稈,在秸稈被壓薄并固定時,置于滾筒內的鴨嘴式播種器的鴨嘴從滾筒中伸出,穿透秸稈完成打穴與播種。相對于現有形式,無需對秸稈殘茬進行任何處理,不進行破茬分草和開溝等工序,避免了秸稈和雜草的堵塞,提高了裝置的通過性[21]。但在免耕播種機構設計過程中,涉及參數多,公式復雜,計算量大。當播種需求、播種條件改變時,需重新設計機構的各結構參數,延長了設計人員的設計周期,不易完成機構的優化設計。
針對上述問題,本文以滾筒式免耕播種機構為研究對象,研究一種交互式設計平臺。使用Matlab設計并改進算法,進一步優化機構結構參數的求解過程,并在CATIA環境下二次開發,利用關聯設計方法建立參數化模型。使得系統可以通過人機交互,根據用戶需求快速獲得優化后的結構參數,并生成對應參數模型,從而縮短設計周期,優化機構,減少設計人員的計算量,提高效率與準確度,以適應現代農業生產對農機產品定制化與個性化需求的新形勢,同時為該類問題的研究提供一種通用的方法。
1 交互式設計系統技術方案
在交互式優化設計系統的設計過程中,首先應確定系統的功能與應用模塊,并根據知識的數據特征構建知識庫;然后根據人機友好原則設計系統人機界面,從而完成整個交互式優化設計系統的設計過程。滾筒式免耕播種機構交互式優化設計系統技術方案如圖1所示。
根據滾筒式免耕播種機構設計要求與功能結構要求,建立知識庫。其中包括對各參數的定義與分類,以及各參數之間的約束關系。
依據用戶需求確定設計參數,并使用CATIA工具集進行整機設計。整機設計包括關鍵零部件參數化設計及整機系統匹配設計。
關鍵零部件參數化設計即根據滾筒式免耕播種機構的設計要求,建立目標函數與約束,并對各結構參數進行優化。將得到的優化結果和問題的理想目標值進行比較,把不滿意的結果提供給模型繼續求解。如此反復,直到求得設計者滿意的參數化模型,并把所得的參數化模型存入模型庫中。
整機系統匹配設計包括整機的總體布局以及動力匹配等內容。

圖1 滾筒式免耕播種機構交互式優化設計系統技術方案Fig.1 Technical scheme of interactive optimization design system of drum-type no-till planter mechanism
本文主要研究滾筒式免耕播種機構關鍵零部件參數化設計過程:采用優化設計方法,設計結構參數優化算法,建立參數化模型,并設計與之對應的人機交互界面,使系統可在不同需求下快速生成各結構參數,準確得出最優參數組合,并生成所需模型,以縮短設計時間,提高設計效率與準確度。
2 理論模型建立
滾筒式免耕播種機結構如圖2所示。作業時,地輪將動力由鏈傳動傳遞給鴨嘴滾輪排種裝置,再通過鴨嘴滾輪排種裝置上的鴨嘴推動滾筒,從而驅動整個裝置轉動。秸稈被轉動的滾筒碾壓成薄層,鴨嘴穿透這一薄層秸稈后進行成穴并投種。
以滾筒式免耕播種機構的一個播種單元為研究對象,簡化實體模型,并根據其工作原理進行運動分析,得到的理論模型如圖3所示。
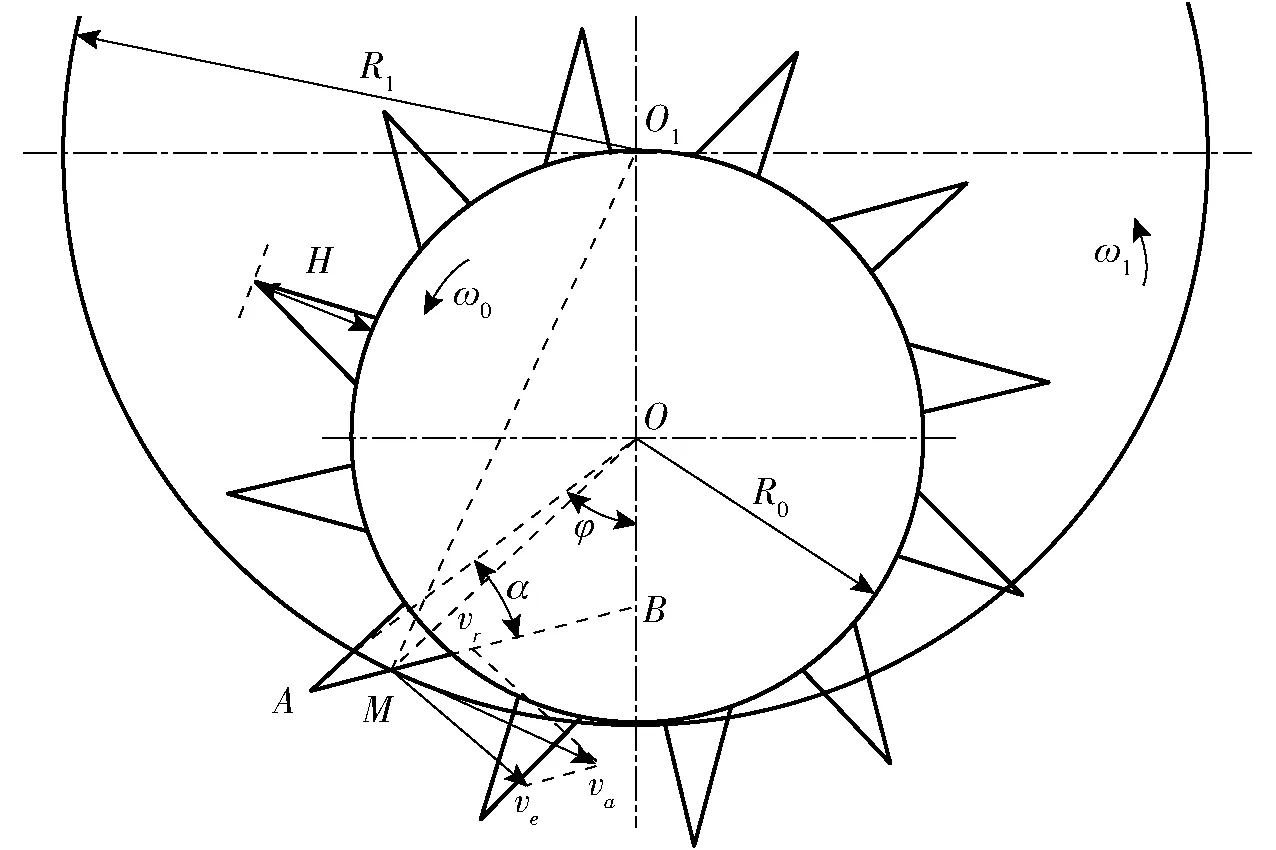
圖3 滾筒式免耕播種機構理論模型Fig.3 Theory model of drum-type no-till planter mechanism
鴨嘴與滾筒的接觸點M的絕對速度va由其相對鴨嘴滾輪排種裝置中心O的牽連速度ve和相對鴨嘴助力角驅動面的相對速度vr合成。M點位置隨鴨嘴滾輪排種裝置的轉動不斷變化,當M點與豎直線O1O重合時,相對速度vr為零,此位置所對應的驅動角φ為σ,即
(1)
式中α——鴨嘴助力角,rad
R0——鴨嘴滾輪排種裝置半徑,mm
H——鴨嘴高度,mm
當鴨嘴滾輪排種裝置繼續轉動時,M點相對速度vr方向反轉。以σ為臨界點,通過運動分析,對兩種情況進行討論,得到鴨嘴滾輪排種裝置角速度ω0與鴨嘴助力角α一定時,滾筒角速度ω1隨驅動角φ的變化關系為[21]:當φ≥σ時,有
(2)
(3)
當φ<σ時,有
(4)
(5)
式中R1——滾筒半徑
3 結構參數優化算法

由于滾筒式免耕播種機構中涉及結構參數眾多,為方便對結構參數進行優化,現把機構中需要優化的結構參數分為兩類,即基本結構參數與輔助結構參數。基本結構參數約束機構的總體尺寸,輔助結構參數保證機構成穴作業的完成。機構具體的目標函數與約束條件建立過程如下。
3.1 基本結構參數的確定
本文取L、h1、Q為設計參數。其中L為株距,mm;h1為播種深度,mm;Q為還田量,kg/hm2。
還田量Q可轉化為還田高度h2,mm。一般非人為堆積玉米秸稈的密度ρ為35 kg/m3左右[22],因此,還田高度h2可以表示為
(6)
滾筒式免耕播種機構的基本結構參數為x、R0、R1、H。其中x為鴨嘴數;R1為滾筒半徑,mm。
鴨嘴滾輪排種裝置的半徑R0為
(7)
鴨嘴滾輪排種裝置的半徑R0取值一般在180~240 mm范圍內[23],則鴨嘴數x的取值范圍為
(8)
鴨嘴個數在滿足約束條件的情況下不宜過多,且鴨嘴的個數x一般取偶數[24],因此可確定最佳鴨嘴數x。根據上述已知參數,計算后對結果圓整,即可得出鴨嘴滾輪排種裝置的半徑R0。
鴨嘴高度H為
H=h1+h2+h3
(9)
式中h3——滾筒厚度,mm
滾筒式免耕播種機構在作業的過程中,若滾筒半徑R1過小,則滾筒不能有效碾壓秸稈,產生秸稈纏繞堵塞現象,從而影響播種作業的進行,不能達到預期的播種效果[21]。設R1與R0的比值為k。k值過小滾筒與鴨嘴滾輪排種裝置之間不能滿足正常的幾何運動關系,完成整個作業過程;同時為減輕滾筒式免耕播種機構總體質量,節約生產成本,在滿足約束條件的情況下,k值不宜過大。綜合考慮以上因素,初定k為2。則滾筒半徑R1為
R1=2R0
(10)
3.2 輔助結構參數的確定
鴨嘴在驅動滾筒運動的過程中,相對于滾筒的位置是不斷變化的,這就需要設置合理的驅動孔尺寸,保證鴨嘴與滾輪在運動過程中不發生干涉;為減緩滾筒速度的變化幅度,保證機構的平穩運行,應設置合理的驅動角φ與鴨嘴助力角α。因此設定輔助參數為助力角α、驅動角φ、開孔數n和開孔長度l,輔助參數的求解過程即尋求最佳鴨嘴助力角α與驅動角φ,并確定其所對應驅動孔數n和開孔長度l。
取基本結構參數H=90 mm,R0=200 mm,R1=400 mm,x=12,作業速度v=1 m/s,即鴨嘴滾輪排種裝置角速度ω0=5 rad/s,探究不同鴨嘴助力角α下所對應滾筒角速度ω1隨驅動角φ的變化規律,如圖4所示。

圖4 驅動角φ和鴨嘴助力角α對滾筒角速度的影響規律Fig.4 Influencing law of drive angle φ and duckbill power angle α on roller angular velocity
當驅動角為φ時,鴨嘴開始驅動滾筒;當φ0=φ-30°時,鴨嘴停止驅動滾筒。其有效作用區間為鴨嘴角間距γ=30°。在圖中可以劃分出若干區間為γ的曲線段,此區間即為鴨嘴驅動滾筒時滾筒角速度ω1的變化曲線。
對于任一鴨嘴,從其開始驅動至離開滾筒時,鴨嘴相對于圓心O所轉過的角度θ為
(11)
鴨嘴轉過角度θ時,所用的時間T為
(12)
鴨嘴從開始驅動,相對于圓心O轉過角度γ時,所用的時間t1為
(13)
在時間T所在的任一時間t內,鴨嘴轉過的角度β1與滾筒轉過的角度β2為

(14)

(15)
其中
為使鴨嘴與滾筒在運動的過程中不發生干涉,應滿足的條件為在時間T所在的任一時間t內有β1≤β2。
如圖5所示,1號鴨嘴與2號鴨嘴分別處于交替驅動的臨界位置,設2號鴨嘴所對應的驅動角為φ1,驅動孔角間距∠MO1M1為μ。則
(16)

圖5 驅動孔角間距示意圖Fig.5 Diagram of angular spacing between driving holes
根據滾筒驅動孔角間距可求得滾筒驅動孔數n為
(17)
n不為整數時,可圓整為ns。由此便可以求得各鴨嘴助力角α所對應的最佳驅動角φ下,鴨嘴的開孔數n與圓整后的開孔數ns。設Δn=ns-n,為保證滾筒的精度與滾筒運轉時的可靠性,Δn越小越好。則Δn取最小值時所對應的鴨嘴助力角即為最佳鴨嘴助力角,其所對應的最佳驅動角與開孔數為φα和nsα。則驅動孔角間距μα為
(18)
如圖6所示,滾筒式免耕播種機構運動到此位置時,3號鴨嘴驅動滾筒運動,4號鴨嘴頂點與滾筒圓周相交于N1,其所在驅動孔作用點為N2,圓弧N1N2所對應的弦長為最大弦長,即為滾筒所設置驅動孔的合理弦長l。

圖6 驅動孔弦長與鴨嘴位置關系Fig.6 Position relationship between duckbill chord length and drive hole
設∠N1O1E為δ,則
(19)
令φ=δ-pγ,且令φ≤φα,當p取最小整數值時,記φ2=δ-pminγ。
當鴨嘴相對于圓心O從角度δ運動到φ2,所用的時間t2為
(20)
鴨嘴與滾筒的接觸點M相對于圓心O1所轉過的角度β為

(21)
則驅動孔最大橫弦相對于O1對應的圓心角λ為
λ=β-pμ
(22)
滾筒上所設置的驅動孔的弦長l為
(23)
4 人機交互設計
4.1 交互信息
在滾筒式免耕播種機構交互式優化設計系統中,為滿足用戶需求,用戶需向系統中輸入設計參數,以獲得滿足設計要求的結構參數,如表1所示,從而完成滾筒式免耕播種機構的總體設計。

表1 交互信息Tab.1 Interactive information
4.2 Matlab編程
根據結構參數優化算法,設計程序框圖如圖7所示。根據程序流程圖編寫程序,以實現優化過程的程序化。

圖7 滾筒式免耕播種機構交互式優化設計系統程序框圖Fig.7 Program block diagram of interactive optimal design system of drum-type no-till planter mechanism
滾筒角速度ω1的求解過程是所有結構參數優化求解的基礎,因此需得到不同驅動角φ下所對應的滾筒角速度ω1。令b2為驅動角φ,b1為相對速度vr為0時,所對應的驅動角σ。當鴨嘴滾輪排種裝置角速度ω0與鴨嘴助力角α一定時,不同驅動角φ下所對應的滾筒角速度ω1的求解過程可用偽代碼表示為:
if b2>b1 then
OA←R0+H;
y1←sin(pi-a-b);
OB←OA*sin(a)/y1;
O1B←X+OB;
y2←sin(a+b-asin(O1B*y1/R1));
BM←R1*y2/y1;
OM←sqrt(OB^2+BM^2-2*OB*BM*cos(pi-a-b));
O1MO←acos((R1^2+OM^2-X^2)/(2*R1*OM));
CMD←pi/2-O1MO;
OMB←asin(OB*sin(pi-a-b)/OM);
O1MB←O1MO+OMB;
ve←w0*OM;
vr←ve*cos(CMD)/cos(O1MB);
va←vr*sin(O1MB)+ve*sin(CMD);
O1M←R1;
w1←va/O1M;
else
OA←R0+H;
y1←sin(pi-a-b);
OB←OA*sin(a)/y1;
O1B←X+OB;
y2←sin(asin(O1B*sin(a+b)/R1)-a-b);
BM←R1*y2/sin(a+b);
OM←sqrt(OB^2+BM^2-2*OB*BM*cos(a+b));
O1MO←acos((R1^2+OM^2-X^2)/(2*R1*OM));
CMD←pi/2+O1MO;
OMB←pi-asin(OB*sin(pi-a-b)/OM);
O1MB←O1MO+OMB;
ve←w0*OM;
vr←ve*cos(CMD)/cos(O1MB);
va←ve*sin(CMD)-vr*sin(O1MB);
O1M←R1;
w1←va/O1M;
end if
以上述程序代碼為基礎,根據約束條件,依據線性搜索法編寫程序,即可得到滿意的目標值。
4.3 交互界面
通過Matlab的圖形用戶界面,根據用戶所提供的原始參數,直接在界面中獲得優化后滾筒式免耕播種機構的各結構參數,從而設計出具有人機交互、界面友好特性的用戶界面。
Matlab圖形用戶界面是Matlab用戶圖形接口,其用戶界面的設計方法有兩種:使用可視化的圖形界面開發環境和直接編寫程序[25-26]。圖形用戶界面開發環境提供了更加方便快捷地設計圖形用戶界面的工具。
進行人機交互界面設計時,首先應啟動GUI設計窗口,選擇Blank GUI模板。在窗體中添加面板、靜態文本、編輯框和按鈕并修改屬性,設計的人機交互界面如圖8所示。其中,播種深度作為行業知識已在界面中設為默認值,不可輕易修改,若要修改需在更高的管理模式下進行。

圖8 人機交互界面Fig.8 Human-computer interaction interface
4.4 系統測試
以東北地區玉米-大豆免耕輪作播種模式為例,對交互式優化設計系統進行測試。玉米和大豆的播種深度一般以30~50 mm為宜,密植玉米的播種株距在190 mm左右,大豆的播種株距為70~120 mm[27-28]。玉米產量在7 500~9 000 kg/hm2之間,其作物經濟系數平均為0.35,則每公頃所產玉米秸稈量為15 000 kg左右;大豆產量在3 000 kg/hm2左右,其作物經濟系數平均為0.18,計算可得所產大豆秸稈為13 500 kg左右[29]。
給定播種深度為50 mm,設定還田量分別為50%、70%、100%,并對應改變株距,對交互式優化設計系統做多組測試,所得結果如表2所示,平均每組測試程序運行時間為300 s左右。
對比手工計算,需設計人員根據設計參數確定基本結構參數,依此建立數學模型,得到驅動角與滾筒角速度之間的函數圖形;通過函數圖形,結合CATIA運動仿真模塊進行干涉分析,確定輔助結構參數,從而完成滾筒式免耕播種機構的設計過程。在表2中抽取第1、3、5、7組數據進行手工驗證,圓整后的計算結果與系統測試結果相比無過大偏差。但計算過程方面,即使對于熟悉該機構且熟練掌握計算流程的設計者,獲得一組數據平均需要2~3 h;對于一般技術人員則需要長達1~2 d,且無法避免人員素質及差別所導致的問題與偏差。
由測試結果可知,交互式設計系統可以根據不同作物的播種需求快速做出響應,得出最優參數組合,最大限度縮短了設計時間,適應定制化研發。解決了傳統設計中由于參數的改變,重復進行優化過程,使計算量增大等問題,從而減輕了設計人員的勞動強度。
5 關聯模型建立及驅動
5.1 關聯模型建立
為減輕設計人員的勞動強度,提高設計效率,利用關聯設計方法建立參數化模型,使得優化后的結構參數可直接驅動模型改參,獲得所需模型。
關聯設計主題思想是將設計特征與設計參數和設計輸入關聯起來,通過關聯和發布機制實現關聯設計。它大大減輕了設計者的負擔,激活了設計者的主動創新思想[30-31]。滾筒式免耕播種機構播種單元參數化模型如圖9所示,其具體設計過程如下:

表2 滾筒式免耕播種機構交互式優化設計系統測試與手工計算結果Tab.2 Test and manual calculation results of interactive optimal design system of drum-type no-till planter mechanism
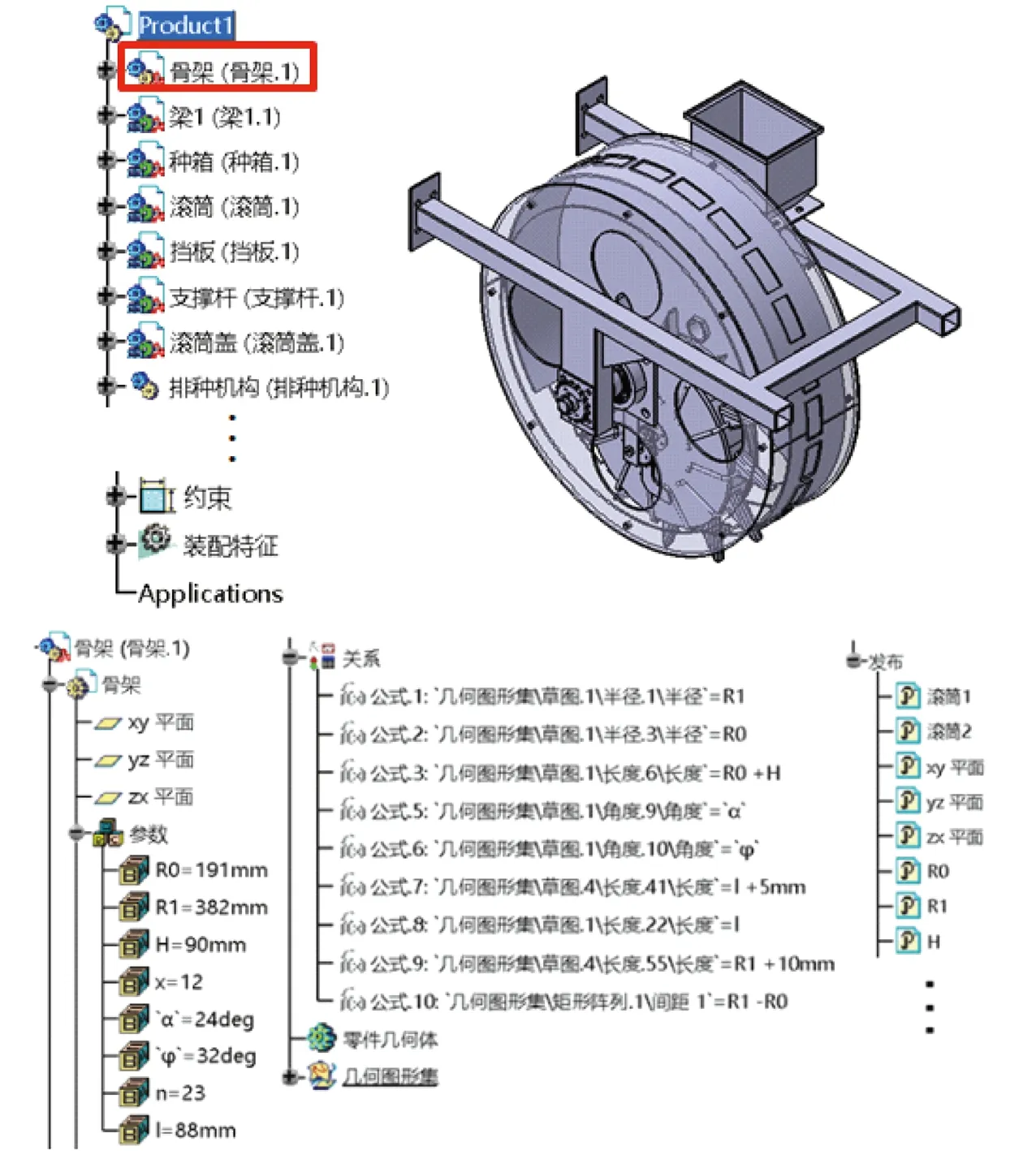
圖9 滾筒式免耕播種機構播種單元參數化模型Fig.9 Parameterized model of seeding unit of drum-type no-till planter mechanism
在CATIA中建立完整的結構樹,并建立詳細的骨架模型。在一個新的裝配中新建一個名稱為骨架的Part,骨架應當是該裝配的第一個零件;使用Fix裝配約束,在該裝配中固定骨架模型;創建用來定義整個裝配的幾何參考特征和用戶參數,根據各子裝配與各零件之間的相對位置關系,建立基準點、基準線、基準面,并根據滾筒式免耕播種機構的運動原理圖繪制草圖,作為整個機構的基本骨架;發布骨架中定義的幾何信息和用戶參數,以更好地控制所創建的外部參考特征。
在一個產品模型中,除主骨架之外還存在多個子骨架,如排種機構骨架。子骨架中的信息來自于主骨架并添加了新的相對于子裝配的驅動信息,使關聯信息可以更好地自上而下傳遞。
通過關聯copy/paste將相應的骨架中的信息傳遞到相應的部件中。在相應的部件中進行設計,并通過骨架建立相應空間位置約束,從而完成整個參數化模型的設計。
5.2 關聯模型驅動
使用VB.NET對CATIA進行二次開發。通過人機交互界面輔助完成滾筒式播種機構的設計,并可直接在界面中修改參數值驅動模型改參。設計的人機交互界面如圖10所示。
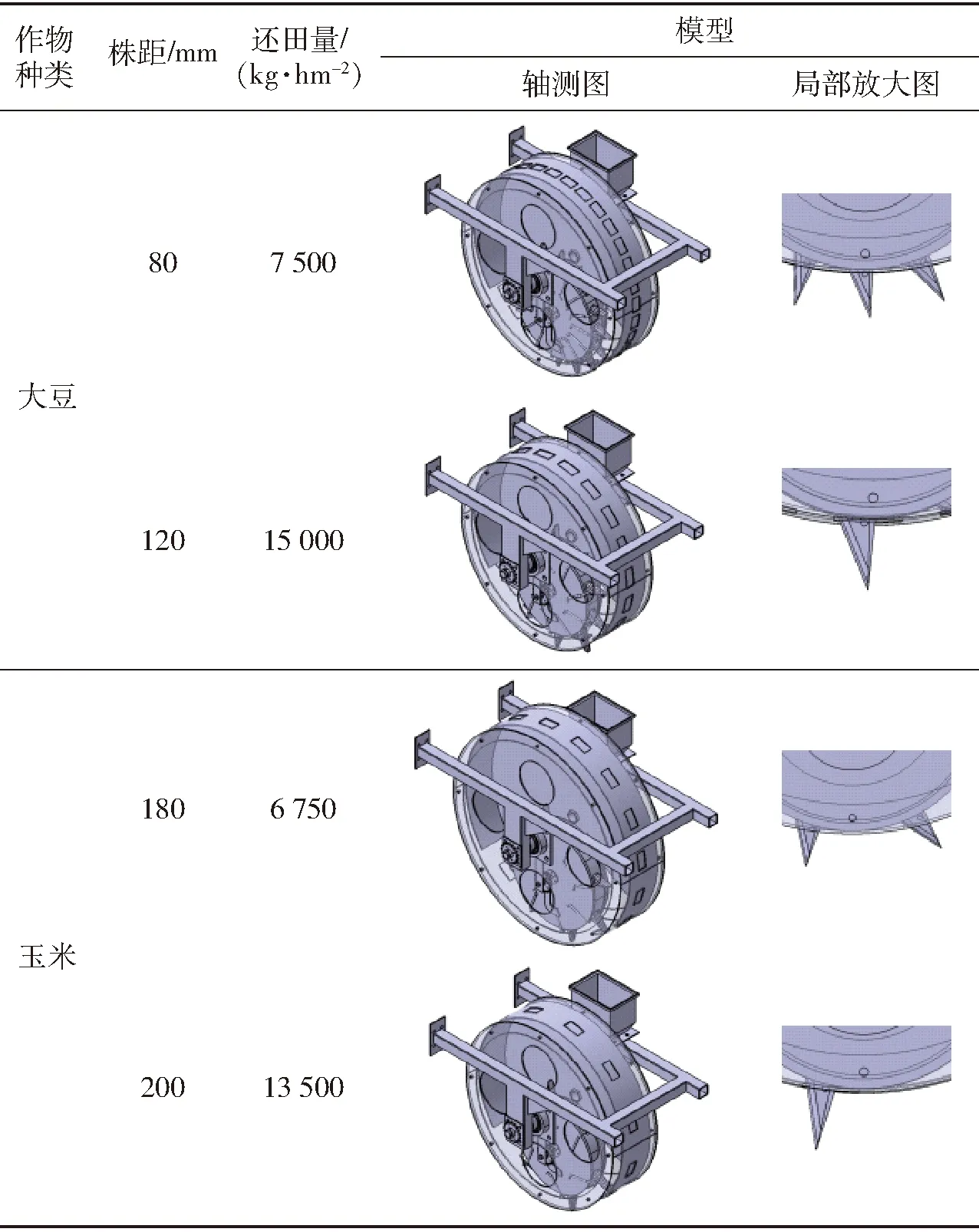
從表2中選擇4組參數,其輸入參數依次為:(大豆)株距80 mm,還田量7 500 kg/hm2;(大豆)株距120 mm,還田量15 000 kg/hm2;(玉米)株距180 mm,還田6 750 kg/hm2;(玉米)株距200 mm,還田量13 500 kg/hm2。通過向人機交互界面中依次輸入與4組輸入參數所對應的結構參數,驅動參數化模型改變參數。虛擬驅動后結構如表3所示。

圖10 模型參數化界面Fig.10 Model parameterization interface
6 實例分析
限于篇幅、成本和周期,本文選擇表2中的3組數據,加工試驗樣機,對滾筒式免耕播種機構交互式優化設計系統進行實例分析和驗證[32-33]。
6.1 試驗條件
2018年9月,在東北農業大學試驗場地進行了滾筒式免耕播種機構樣機功能試驗,如圖11所示。場地模擬免耕作業條件,由模擬機器收獲粉碎的陳年玉米秸稈覆蓋。試驗地土壤為黑土,土壤含水率為17.3%,土壤堅實度為3.0×105Pa。

圖11 滾筒式免耕播種機構樣機功能試驗Fig.11 Function test of drum-type no-till planter mechanism
6.2 試驗方法
以東北地區玉米-大豆免耕輪作播種模式為例,按玉米秸稈還田量100%、70%、50%,株距100 mm、播種深度50 mm的播種需求,根據表2中所對應的結構參數加工滾筒式免耕播種機構試驗樣機。按照滾筒式免耕播種機構預期實現的設計功能,參照GB/T 20865—2007《免耕施肥播種機》和GB/T 6973—2005《單粒(精密)播種機試驗方法》進行樣機功能試驗,選用拖拉機配套動力為35 kW,作業速度取1.0、1.5 m/s。每組試驗完成后,觀測成穴效果并分別測量其播種深度和株距,如圖12所示。

圖12 成穴效果及測量方法Fig.12 Cavitation effect and measuring method
6.3 試驗結果
試驗過程中,滾筒與鴨嘴工作時無干涉,滾筒可以對秸稈進行有效碾壓,且通過性良好,對鴨嘴無過大沖擊影響。
試驗統計結果如表4所示。3組試驗中播種深度和株距均滿足相關標準規定,可達到播種要求,且播種深度及株距均勻穩定,成穴效果良好。
播種深度及株距合格率在相關標準允許范圍內略有下降。一方面試驗田地形起伏及秸稈量分布不均勻均可造成合格率下降。另一方面作業速度由1 m/s變為1.5 m/s時,播種深度減小,株距增大,造成整體播種合格率下降,究其原因是作業速度增加致使鴨嘴未充分扎入土壤即脫離成穴區域前進,且滾筒滑移量相對增加。
試驗證明了滾筒式免耕播種機構交互式優化設計系統的可行性和有效性。

表4 試驗統計結果Tab.4 Test statistical results
7 結論
(1)滾筒式免耕播種機構中涉及參數眾多,為方便優化設計,把機構中需要優化的結構參數分為基本結構參數與輔助結構參數。基本結構參數約束了機構的總體尺寸,輔助結構參數保證機構成穴作業的完成。
(2)以滾筒角速度ω1的求解過程為基礎,并將輔助結構參數的求解過程轉化為角度與時間之間的函數關系,使問題的求解過程得以簡化。
(3)利用Matlab語言可獲得鴨嘴與滾筒在任意時間段內所轉過的角度β1與β2,并根據線性搜索法,檢測鴨嘴與滾筒在運動過程中是否發生干涉。使得結構參數優化算法能夠基于Matlab語言得以程序化。
(4)利用關聯設計方法,根據滾筒式免耕播種機構的運動原理圖繪制草圖,作為整個機構的基本骨架。通過關聯和發布機制,并結合人機交互界面,可快速獲得改變參數后的模型,大大減輕設計人員的設計負擔,提高滾筒式免耕播種機構的設計效率。
(5)按玉米秸稈還田量100%、70%、50%,株距100 mm、播種深度50 mm的播種需求,參照系統所得結構參數加工滾筒式免耕播種機構試驗樣機并進行樣機功能試驗。穴深和穴距均達到播種要求,且成穴效果良好,證明了滾筒式免耕播種機構交互式優化設計系統的可行性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01