馬鈴薯種植機械化關鍵技術(shù)與裝備研究進展分析與展望
2019-04-01 12:27:12李紫輝溫信宇呂金慶李季成衣淑娟
農(nóng)業(yè)機械學報 2019年3期
關鍵詞:作業(yè)
李紫輝 溫信宇 呂金慶, 李季成 衣淑娟 喬 丹
(1.東北農(nóng)業(yè)大學工程學院, 哈爾濱 150030; 2.黑龍江八一農(nóng)墾大學工程學院, 大慶 163319)
0 引言
馬鈴薯是中國第四大糧食作物,其種植范圍廣,在全國各省市自治區(qū)均有種植,2018年馬鈴薯種植面積約554萬hm2[1-3]。馬鈴薯種薯分為整薯和切塊種薯,均具有形狀不規(guī)則、質(zhì)量大、種薯個體差別較大等生物特征[4-5]。由于馬鈴薯存在栽培模式多、栽培的自然條件差異較大、農(nóng)藝過程繁雜、勞動強度大和效率低等諸多因素,因此發(fā)展馬鈴薯機械化種植技術(shù)及裝備是對我國馬鈴薯生產(chǎn)發(fā)展的有力支撐,是提高我國馬鈴薯綜合機械化水平、推進農(nóng)業(yè)現(xiàn)代化的重要舉措之一[6-8]。
長期以來,馬鈴薯種植機械化是我國馬鈴薯生產(chǎn)機械化的薄弱環(huán)節(jié)[9-11]。目前,我國馬鈴薯機械化種植分為整薯種植和切塊薯種植。按種植規(guī)模程度分為:小區(qū)實生薯育種整薯種植、規(guī)模化田間生產(chǎn)種植和丘陵山地輕簡型種植3類機械化種植形式。小區(qū)實生薯育種種植和丘陵山地輕簡型種植的種植機械均具有輕簡型特點,而小區(qū)實生薯育種又要求精準、整薯播種,機具要適合頻繁更換不同品種種薯的農(nóng)藝特點,目前農(nóng)機農(nóng)藝相融合的適用機具少,是機械化技術(shù)研究有待突破的重點[12-14]。
規(guī)模化田間生產(chǎn)種植主要包括微型薯、分級不需切塊的小型馬鈴薯種薯種植,以及切塊種薯的種植。具有規(guī)模化、標準化、適合大型機械的特點,機械化程度較高,基本以機械式播種技術(shù)及裝備為主。區(qū)別于微型薯和不需切塊的小型馬鈴薯種薯種植,切塊薯種植還包括分級整列切塊、噴潤滑劑、噴藥等種薯預處理過程。
本文對馬鈴薯機械化種植技術(shù)的研究歷史及現(xiàn)狀進行分析闡述。概括和分析國內(nèi)外典型的馬鈴薯種植機械化關鍵技術(shù)及裝備的研發(fā)現(xiàn)狀,進而圍繞馬鈴薯分級切塊種薯預處理和馬鈴薯機械化播種技術(shù)及裝備的研究動態(tài),對馬鈴薯機械化種植技術(shù)及裝備進行分析、歸納,在此基礎上展望我國馬鈴薯種植機械研究的未來發(fā)展趨勢。
1 馬鈴薯種植機械化發(fā)展研究歷程
國外馬鈴薯機械化發(fā)展較早,美國在1913年開始研制,20世紀30年代全部實現(xiàn)機械化,60年代馬鈴薯聯(lián)合收獲機械達到100%;前蘇聯(lián)20世紀30年代開始研究馬鈴薯機械化,60年代實現(xiàn)全程機械化。比利時、荷蘭、德國等也在二戰(zhàn)之后,開始發(fā)展馬鈴薯機械化生產(chǎn)。
我國馬鈴薯機械化技術(shù)研究起步較晚,1966年在研學前蘇聯(lián)機械基礎上,開始仿制馬鈴薯種收機械。1978年12個具有馬鈴薯機械生產(chǎn)優(yōu)勢的國家參加北京國際馬鈴薯機械化大會后,將參展的全部馬鈴薯機械贈送給了中國,標志著中國馬鈴薯機械化研究的起點,馬鈴薯種植機械化有了快速的發(fā)展。1987年黑龍江省農(nóng)業(yè)機械工程科學研究院研制了4U-2型馬鈴薯挖掘機;1996年黑龍江省農(nóng)業(yè)機械工程科學研究院參考西德卡拉姆的舀勺式馬鈴薯播種機研制了2ZZ-2型馬鈴薯播種機,在2001年完成了馬鈴薯播種機的樣機試制并推廣應用;2004年,黑龍江八一農(nóng)墾大學設計的2CM-2型馬鈴薯播種機,采用勺鏈式排種器,與普通鉤形勺鏈式排種器相比,因作業(yè)環(huán)境惡劣引起的排種器堵塞現(xiàn)象明顯減少,潤滑方便,作業(yè)速度有所提高;2011年東北農(nóng)業(yè)大學研發(fā)團隊研制成功了2CMB2型馬鈴薯播種機,并得到了大面積的推廣應用。
2 馬鈴薯種植機械化關鍵技術(shù)與研究動態(tài)
2.1 中國馬鈴薯種植總體情況及不同區(qū)域農(nóng)機農(nóng)藝相融合的機械化程度
馬鈴薯在中國種植區(qū)域廣泛,不同自然條件、不同栽培制度、不同栽培類型,導致機械化程度差別顯著。馬鈴薯區(qū)域分為4個栽培區(qū):北方一季作區(qū)、中原二季作區(qū)、南方冬作區(qū)、西南單雙季混作區(qū),不同區(qū)域種植面積分布不同。中國馬鈴薯近5年種植面積約550萬hm2。北方一季作區(qū)包括黑龍江、吉林兩省及遼寧省除遼東半島以外的大部,華北地區(qū)的河北北部、山西北部、內(nèi)蒙古全部以及西北地區(qū)的陜西北部、寧夏、甘肅全部、青海東部和新疆的天山以北;中原二季作區(qū)包括遼寧、河北、山西、陜西四省的南部,湖北、湖南二省的東部,河南、山東、江蘇、浙江、安徽和江西省;南方冬作區(qū)即南嶺、武夷山以南的各省,包括廣西、廣東、海南、福建、臺灣省等;西南單雙季混作區(qū)包括云貴川、西藏和湖南、湖北的西部山區(qū)[15]。北方一季作區(qū)種植面積占50%以上,中原二季作區(qū)種植面積約占7%,南方冬作區(qū)5%,西南單雙季混作區(qū)占38%。北方一季作區(qū)和中原二季作區(qū)栽培技術(shù)基本相同。目前中國馬鈴薯耕種播收綜合機械化水平約為46%,種植機械化水平約為50%。其中北方一季作區(qū)與中原二季作區(qū)基本實現(xiàn)了全程機械化,種植機械化約為95%,主要機械均采用機械式播種機播種切塊薯(約占播種面積的95%)或整薯(不足5%)。南方冬作區(qū)及西南單雙季混作區(qū)多為丘陵山地,由于地塊狹小,栽培模式多、雜等原因,機械化水平較低,耕種播收綜合機械化水平不足3%,種植機械化水平不足5%。
播種機械以舀勺式切塊種薯播種機為主要機型,其作業(yè)速度較快,作業(yè)質(zhì)量較好、故障率較低[16-18]。采用整薯播種的主要以微型薯繁育種薯為主,機具形式以轉(zhuǎn)盤式馬鈴薯播種機或帶式馬鈴薯播種機為主要產(chǎn)品,其主要特點為作業(yè)速度慢、效率低、播種質(zhì)量差、株距不準確、重漏播率高、勞動強度偏大,需人工輔助供種。馬鈴薯產(chǎn)業(yè)發(fā)展過程中育種是關鍵,所以小區(qū)播種機械化是馬鈴薯產(chǎn)業(yè)發(fā)展的重要組成部分。由于小區(qū)育種過程中,不同品種需頻繁更換、同行不同品種間需1~1.5 m的區(qū)間道,所以小區(qū)育種機械化仍采用機械開溝、人工播種和機械覆土的分段播種形式[19-21]。
按排種形式不同,機械式馬鈴薯播種機主要分為轉(zhuǎn)盤式、舀勺式、帶式、針刺式、指夾式。這些機械式馬鈴薯播種機均存在一定技術(shù)局限,作業(yè)速度一般不超過6 km/h,效率偏低、重漏播率偏高[22-24]。
2.2 馬鈴薯種薯切塊預處理機械化技術(shù)及裝備
馬鈴薯機械化播種作業(yè)效率、質(zhì)量是影響馬鈴薯產(chǎn)量的關鍵因素。目前馬鈴薯機械化播種主要栽培模式以切塊薯為主,切塊的均勻度直接影響馬鈴薯的播種質(zhì)量;馬鈴薯切塊后病蟲害易感染傳播。馬鈴薯種薯切塊預處理機械化技術(shù)及裝備一直處于馬鈴薯機械化生產(chǎn)的首要位置。目前中國馬鈴薯切塊仍處于人工切種、人工切刀消毒、人工背負式噴藥機進行種薯噴藥的狀態(tài);作業(yè)效率低、切塊不均勻、勞動強度大和噴施農(nóng)藥影響環(huán)境等問題嚴重影響馬鈴薯產(chǎn)業(yè)的發(fā)展。

圖1 馬鈴薯種薯預處理技術(shù)工序Fig.1 Seed potato pretreatment technology process
馬鈴薯種薯預處理是一個較復雜的過程,圖1所示為馬鈴薯種薯預處理涉及到的技術(shù)工序,包括種薯多級分級除雜技術(shù)、種薯整列技術(shù)、種薯定位橫豎切塊技術(shù)、種薯出料技術(shù)、切刀消毒技術(shù)、種薯噴潤滑劑、噴藥技術(shù)和腐爛薯剔除技術(shù)。國外依托這些技術(shù)研制的裝備作業(yè)效率高,可達10~40 t/h;如美國Milestone公司生產(chǎn)的60-D型馬鈴薯分級切塊機,分級種薯的大小級別可依據(jù)農(nóng)藝要求調(diào)節(jié),切后薯塊尺寸依據(jù)農(nóng)藝要求定制縱切刀的間距;作業(yè)質(zhì)量好,切塊種薯種牙合格率可達到99%;切塊尺寸均在合格范圍,合格率可達95%;具有效率高、調(diào)整方便、勞動強度小等諸多優(yōu)點。缺點是價格昂貴、零配件供應不及時。而馬鈴薯種薯預處理技術(shù)及其裝備在我國目前處于初步研制階段。
國外對馬鈴薯分級機研究的起步較早,英國羅科特洛尼格公司研究的基于視覺進行馬鈴薯分級的控制系統(tǒng),自動化程度較高,但體積龐大。德國Grimme公司生產(chǎn)了集輸送、清洗、分選包裝于一體的大型分級設備,但分級等級少。國外設備均造價昂貴,不適合我國國情。國內(nèi)對馬鈴薯分級機械的研究主要有:王相友等[25]設計的撥輥推送式馬鈴薯清選分選機,集清選分級于一體,可降低人工勞動強度。劉洪義等[26]研制的馬鈴薯分級生產(chǎn)線及其關鍵部件是一種成套的加工設備,配置一條完整的生產(chǎn)線。但是我國專門用于馬鈴薯分級的機械較少,多采用網(wǎng)眼式分級篩進行分選,精準的網(wǎng)眼可以分選出尺寸結(jié)構(gòu)相近的馬鈴薯,但是存在級別變更困難、分級等級少、分級效率差、性能不穩(wěn)定等問題[27-29]。
國內(nèi)外馬鈴薯切塊技術(shù)發(fā)展比較緩慢,最近幾年國外發(fā)展較快,以美國、德國、荷蘭等發(fā)達國家為代表。目前在我國處于起步階段,其主要技術(shù)包括種薯定位技術(shù)、切刀定位間隙調(diào)整技術(shù)、動定刀切割技術(shù)、切刀酒精或高錳酸鉀精量消毒技術(shù)、種薯塊噴潤滑劑(滑石粉)均勻噴灑技術(shù)和出料技術(shù)等。
2.3 種薯分離整列拾取技術(shù)與裝備
重漏播率、株距均勻性以及作業(yè)效率,是衡量馬鈴薯播種機作業(yè)效果的關鍵指標[30-32]。種箱當中無序堆放的種薯,經(jīng)過排種器形成單個種薯,按照給定株距落入種溝的過程,其實質(zhì)就是種薯的分離整列拾取技術(shù)。相對其他作物的種子,馬鈴薯種薯(含整薯、切塊薯和微型薯)具有的大尺寸、非對稱、非球面的幾何特征,決定了種薯分離整列拾取技術(shù)與裝置的特殊性[33-35]。目前國內(nèi)外具有代表性的種薯分離整列拾取技術(shù)與裝置有帶(鏈)勺式、差動輸送帶式、氣吸式、針刺式等。
2.3.1帶(鏈)勺式種薯分離整列拾取技術(shù)與裝置
帶(鏈)勺式種薯分離整列拾取技術(shù)與裝置結(jié)構(gòu)原理如圖2所示。

圖2 帶(鏈)勺式種薯分離整列拾取裝置原理圖Fig.2 Structure principle diagram of spoons type separating & picking device
動力由地輪或液壓馬達、電機提供,通過傳動系統(tǒng)帶動主動輪旋轉(zhuǎn);種箱中的種薯在重力作用下流動到種箱底部喂薯區(qū)部位,防架空裝置小幅擺動避免種薯結(jié)拱,物料限位裝置控制流量,兩裝置共同作用保證喂薯區(qū)種薯量維持動態(tài)恒定;此時排種帶在喂薯區(qū)一側(cè)向上運動,種勺依次舀取一或兩顆薯塊;排種帶繼續(xù)向上運動到清種區(qū),振動清種裝置清掉種勺內(nèi)多余種薯,防夾帶頂桿清除勺間夾帶種薯,保證每個種勺中只剩下一顆種薯,且種勺之間也不存在種薯的夾帶,被清掉的種薯落回種箱;種勺到達最高點越過主動輪后,種薯在重力作用下落于前一個種勺的背上,相鄰兩個種勺和排種導管形成相互獨立的空間,每個勺背上只有一顆種薯;種薯在排種導管中繼續(xù)向下運動至投種點,種勺繞從動輪向上翻轉(zhuǎn)進入下一循環(huán),種薯失去支持力,做近似斜拋運動,落于種溝底部,完成一次投種[36-38]。機器運轉(zhuǎn)時重復以上過程,實現(xiàn)連續(xù)投種。
依靠安裝在動力裝置(如地輪)與提種帶主動輪之間的一組交換掛輪來調(diào)節(jié)株距。隨著智能控制技術(shù)在農(nóng)業(yè)機械行業(yè)的應用與發(fā)展,依靠對地測速雷達獲取機具前進速度,進而通過控制系統(tǒng),調(diào)節(jié)提種帶主動輪轉(zhuǎn)速的自動株距調(diào)節(jié)系統(tǒng),在國外一些大型馬鈴薯播種機上得到應用,簡化了株距調(diào)節(jié)工作[39-40]。
此類排種器結(jié)構(gòu)相對簡單、可靠,既適用于整薯的分離整列拾取,又適用于切塊薯的分離整列拾取;在常規(guī)種勺里面套裝微型薯專用種勺,可實現(xiàn)微型薯的分離整列拾取[21],如圖3所示。其重漏播率、株距均勻性等指標較好,是目前國內(nèi)外采用較廣泛的一種分離整列拾取技術(shù)[41-43]。

圖3 適應不同種薯尺寸的套裝種勺Fig.3 Spoon sets for different potato sizes
采用該分離整列拾取技術(shù)原理的典型播種機械包括:德國Grimme公司的GL系列牽引式馬鈴薯種植機,型號有GL410、GL420、GL420 Exacta、GL430、GL660、GL860、GL860 Compacta等;美國Double L公司生產(chǎn)的9500系列馬鈴薯種植機;國內(nèi)的中機美諾1240型播種機等。
Grimme GL系列馬鈴薯播種機基本參數(shù)如表1所示,以GL420四行馬鈴薯播種機為例分析該系列產(chǎn)品的特點,如圖4所示,種箱容量最大可達2 t,種箱可按需求進行更換,有固定式種箱、可傾斜式種箱、可翻轉(zhuǎn)式種箱等可供更換,播種機前方可以選裝施肥部件,同時后方也可安裝土壤整形部件,若安裝整形部件所需配套動力為90 kW[44]。

表1 Grimme GL系列馬鈴薯播種機基本參數(shù)Tab.1 Basic parameters of Grimme GL series potato planter

圖4 Grimme GL420 型馬鈴薯播種機Fig.4 Grimme GL420 type potato planter
Grimme公司在GL系列馬鈴薯播種機的產(chǎn)品改進方面,主要體現(xiàn)在結(jié)構(gòu)更加緊湊,可適用于窄行距種植,對于長型或窄型等形狀不規(guī)則的種薯也可播種。液壓系統(tǒng)可調(diào)節(jié)驅(qū)動種箱角度,使其發(fā)生傾斜,使種薯滑落至輸送帶上,依靠傳感器控制種薯到播種單元的運動,保證投放到各播種單元的種薯數(shù)量一致。控制系統(tǒng)的終端設備安裝在駕駛室內(nèi),使用者可以方便地完成整個控制操作。播種漏播探測系統(tǒng)與控制系統(tǒng),可以根據(jù)用戶的需要選裝。開溝器組件為標配件,開溝器的溝形和深度均可以通過駕駛室內(nèi)的終端設備進行控制,保證開溝深度和形狀一致。GL860 Compacta更是具備特殊的折疊系統(tǒng),方便運輸,播種單元設計緊湊,增加空間利用率,機具可裝備多種整地鎮(zhèn)壓裝置,可完成開溝、播種、施肥、灌溉、起壟、鎮(zhèn)壓等作業(yè)過程。
美國Double L公司生產(chǎn)的9500系列馬鈴薯播種機,也采用帶(鏈)勺式種薯分離整列拾取技術(shù)。以9540型4行馬鈴薯種植機為例,配套動力110 kW以上,較以前的機型作業(yè)效率有了明顯提高,可一次完成開溝、施藥、施肥、播種、起壟、覆土等作業(yè),減少了進地次數(shù);大種箱避免了頻繁停機加注種薯;播種單元選用TKS公司優(yōu)質(zhì)產(chǎn)品,可以在拖拉機駕駛室內(nèi)控制播種間距,精度達到98%以上;液壓和機械驅(qū)動系統(tǒng)采用電子控制;標配的開溝器具有自動越障功能,可自動翻越遇到的石塊等硬物;有4、6、8行多種機型滿足不同的用戶需求[45],其機型基本參數(shù)如表2所示。

表2 Double L 9500系列播種機基本技術(shù)參數(shù)Tab.2 Basic technical parameters of Double L 9500 series planter
國內(nèi)采用帶勺式種薯分離整列拾取技術(shù)的播種機,具有代表性的是中機美諾公司生產(chǎn)的1240A型馬鈴薯播種機,如圖5所示,該機可進行4行播種作業(yè),機具自身質(zhì)量3 t,種箱最大容量為2 t,牽引式配套動力不小于73 kW,該機可一次完成開溝、播種、施肥、培土作業(yè),播種精度高,可選裝噴藥機構(gòu),開溝器為雙圓盤式,采用雙側(cè)深施肥技術(shù),避免種肥同位造成的燒種、燒芽問題[46-49],使種肥分布更加合理。

圖5 中機美諾1240A型馬鈴薯播種機Fig.5 Menoble 1240A type potato planter
2.3.2差動輸送帶式種薯分離整列技術(shù)與裝置
差動輸送帶式種薯分離整列裝置原理如圖6所示。
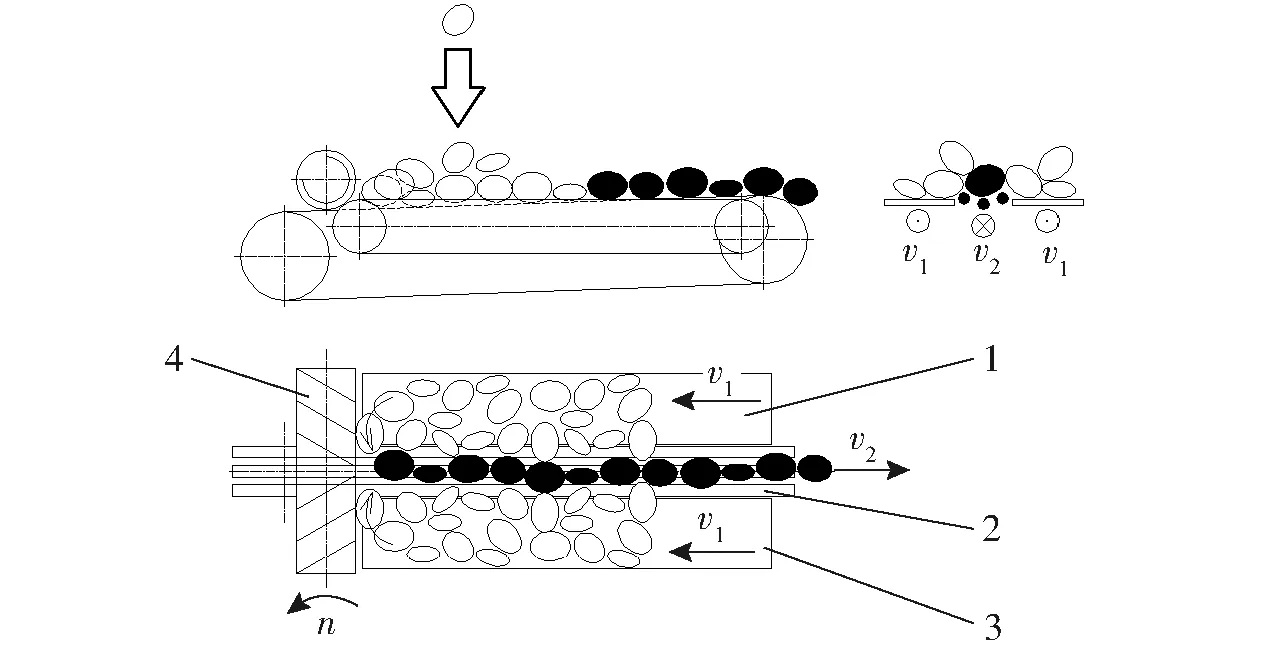
圖6 差動輸送帶整列原理圖Fig.6 Schematic diagram of principle of differential conveyor belt1、3.差動帶 2.整列帶組 4.螺旋輥
裝置水平安裝于機架上,裝置兩側(cè)各有一條差動帶;裝置中央是一組整列帶,其橫截面呈V形布置,上口寬度略大于單個種薯的短軸平均直徑,整列帶組在鉛垂平面內(nèi)與差動帶呈一定角度,輸入端低于差動帶平面,輸出端高于差動帶平面;差動帶的終端裝有螺旋輥,其上的螺旋線呈反向?qū)ΨQ布置。工作時,差動帶、整列帶組以及螺旋輥的運動方向如圖6所示。
上部供種裝置適時將一定數(shù)量的種薯投放到差動帶及整列帶表面。由于整列帶組的傾角作用,整列帶組上重列的種薯在運動中逐漸滑落到兩側(cè)的差動帶上;差動帶帶動種薯沿v1方向運動,當種薯接觸到螺旋輥表面后,由于反向?qū)ΨQ螺旋線的作用,將種薯推向整列帶組的輸入端。由于整列帶組的寬度略大于單個種薯的短軸平均直徑,且整列帶與種薯之間的摩擦因數(shù)大于種薯之間的摩擦因數(shù),在摩擦力的作用下,整列帶組上的種薯在隨著整列帶組沿v2方向運動的同時發(fā)生自旋,種薯的長軸方向與整列帶組的運動方向v2逐漸趨于一致,在整列帶組上面形成單一連續(xù)的種薯流,從輸出端被送往投種裝置,從而實現(xiàn)了種薯的分離與整列功能。
該技術(shù)可降低播種時種薯的摩擦,從而保護種薯不受損傷,代表性播種機有德國Grimme GB系列帶式播種機,比利時Dewulf集團生產(chǎn)的Miedima Structural 系列帶式播種機。
Grimme GB系列帶式播種機主要機型和基本技術(shù)特點如表3所示[50]。該機型特點是作業(yè)速度較高,作業(yè)穩(wěn)定,最高作業(yè)速度可達10 km/h;由于差動輸送帶需要帶動種薯使其具有不同速度,從而進行分離拾取,所以對整薯播種適應性較強,尤其是品種外形為長條狀,但不適用于切塊種薯及微型薯播種。

表3 Grimme GB系列帶式播種機基本技術(shù)參數(shù)Tab.3 Basic technical parameters of Grimme GB series belt planter

圖7 Miedima Structural 2000P型帶式播種機Fig.7 Miedima Structural 2000P belt planter
圖7為Dewulf集團生產(chǎn)的Miedima Structural 2000P型帶式播種機,是一種半懸掛式兩行播種機,可播種行距為75~91 mm,其料斗容量為3 t,配套最小動力為70 kW,該機型較Miedima Structural 2000L型播種機增設了施肥噴藥裝置,作業(yè)精度和作業(yè)速度較高,播種最高速度可達11 km/h。
2.3.3氣吸式種薯分離整列拾取技術(shù)與裝置
氣吸式種薯分離整列拾取技術(shù)依靠負壓產(chǎn)生的吸力,將單顆種薯從種群中分離出來并穩(wěn)定地攜帶種薯隨排種器同步轉(zhuǎn)動[51-54]。
目前,氣吸式分離拾取技術(shù)普遍應用在其他作物上,而能夠?qū)崿F(xiàn)馬鈴薯氣吸播種的裝置較少。形式是仿照其他小籽粒作物分離整列拾取技術(shù),如毛瓊等[55]針對脫毒微型馬鈴薯設計的氣吸式分離整列拾取裝置,為傾斜圓盤式,排種器在播種機上傾斜一定角度安裝,傾斜角度可調(diào),借助傾斜種盤對微型薯的支持力,減小氣室吸種負壓;種盤上均布單排吸種型孔,由于風機的流量和壓強有限,當兩粒或多粒種薯同時吸附于型孔處時,種薯之間的相互接觸使型孔與種薯之間形成很大的空隙,導致壓差下降,所以該排種器只可能漏播而沒有重播;因為微型薯的三軸平均粒徑僅為12~36 mm,該排種器可以延用傳統(tǒng)的氣吸式排種器的結(jié)構(gòu)與工作原理,如圖8所示[56-59]。

圖8 微型薯氣吸式分離整列拾取裝置Fig.8 Diagram of pick-up device of air separation
另一種是采用多臂分布的結(jié)構(gòu)形式[60],原理如圖9所示,主要由吸種臂、種箱、配氣閥、吸管接口、吹管接口和調(diào)節(jié)螺桿等部分組成。

圖9 氣吸式種薯分離整列拾取裝置結(jié)構(gòu)圖Fig.9 Structure of air seed potato separation and picking device1.吸種臂 2.種箱 3.配氣閥 4.靜止軸 5.吸管接口 6.旋轉(zhuǎn)軸 7.吹管接口 8.調(diào)節(jié)螺桿 9.護罩
配氣閥內(nèi)為負壓氣室和正壓氣室,各占一定的角度,吸管接口和吹管接口的一端分別與兩個氣室連通,另一端分別與吸氣風機和吹氣風機通過軟管連接,由風機為排種器提供作業(yè)所必需的吸種負壓和吹種正壓。作業(yè)時,由動力驅(qū)動整個吸種臂旋轉(zhuǎn),當吸種臂處于與負壓氣室連通位置時,吸種臂利用負壓從種箱中吸附單顆種薯,并穩(wěn)定地攜帶種薯隨排種器同步轉(zhuǎn)動,當旋轉(zhuǎn)至與正壓氣室連通的位置時,吸種負壓消失,種薯受重力和吹種正壓力的作用落至壟溝,完成排種作業(yè)[61-63]。
氣吸式種薯分離整列拾取技術(shù)可以克服馬鈴薯自身形狀不規(guī)則帶來的播種問題,既可播種切塊薯又可播種整薯,通過更換吸種臂上安裝的吸種嘴,還可以播種微型薯。該種薯分離整列拾取裝置適應性較好,播種通用性較強[64],但對技術(shù)參數(shù)要求較高,其中吸種負壓的大小,直接影響排種裝置的充種質(zhì)量和攜種穩(wěn)定性。吸種負壓大,雖然提高了攜種穩(wěn)定性,但是吸種臂同時吸附兩顆或多顆種薯的幾率增加,使得排種重播指數(shù)升高;若吸種負壓過小,種薯受到的吸附力不足以克服種薯間摩擦力等充種阻力,無法完成充種過程,當排種作業(yè)存在振動干擾時,被吸附的種薯易從吸種嘴脫落,造成漏播[40,65-66]。由于以上技術(shù)難點,目前該種薯分離整列拾取技術(shù)尚沒有被廣泛推廣應用。
應用氣吸式種薯分離整列拾取技術(shù)的播種裝置,國外主要以美國Lockwood公司生產(chǎn)的604p、606p、608p為代表。圖10為Lockwood 606p型馬鈴薯播種機,其播種行數(shù)為6行,可播種行距為80~100 mm,機具自身質(zhì)量5 t,其種薯料斗箱容量為5.44 t,采用半牽引式,配套動力為134 kW以上拖拉機,可實現(xiàn)高速作業(yè),作業(yè)速度最高可達11.2 km/h,是目前馬鈴薯播種機可穩(wěn)定播種的最高作業(yè)速度,該播種機一次性可完成開溝、播種、施肥、滴灌、覆土、鎮(zhèn)壓等作業(yè),同時內(nèi)部多處裝備播種監(jiān)測傳感器及故障警報裝置,保障機具作業(yè)的順利進行以及出現(xiàn)問題及時檢修[67-69]。

圖10 Lockwood 606p型馬鈴薯播種機Fig.10 Lockwood 606p potato planter
國內(nèi)以東北農(nóng)業(yè)大學馬鈴薯機械科研團隊研制的2CMQ2型氣吸式馬鈴薯精播機為代表,如圖11所示。該機播種行數(shù)為2行,播種行距為80~90 cm,機具自身質(zhì)量2.5 t,其種薯料斗箱容量為2 t,機具采用三點懸掛,配套動力為90 kW以上。該機作業(yè)時無損傷種薯現(xiàn)象,其播種效率較高,作業(yè)速度可達6~10 km/h,重漏播率較低,均小于5%,作業(yè)性能穩(wěn)定[70]。

圖11 2CMQ2型氣吸式馬鈴薯精播機Fig.11 2CMQ2 air potato planter
2.3.4針刺式種薯分離整列拾取技術(shù)與裝置

圖12 刺針式種薯分離整列拾取裝置結(jié)構(gòu)簡圖Fig.12 Structure schematic diagram of needle picking device
圖12所示為刺針式種薯分離整列拾取裝置結(jié)構(gòu)圖。
其主要結(jié)構(gòu)為安裝在排種轉(zhuǎn)盤圓周上的刺針播種臂,排種盤帶動刺針播種臂轉(zhuǎn)動,在種箱內(nèi)取種、攜種,最后完成投種作業(yè)[20,71]。刺針的長度及粗細與所持種薯的尺寸相關,為提高效率,可根據(jù)不同條件進行更換,有的刺針上增加粗糙度以提高拾取穩(wěn)定性。刺針播種臂由定臂和動臂組成,動臂由凸輪轉(zhuǎn)動來控制,形成刺針播種臂的兩種不同工作狀態(tài),當動臂與定臂之間存在一定距離,針刺無法外露于定臂之外時,刺針播種臂處于投種或空臂狀態(tài)下,如圖13a所示;當動臂與定臂緊密相合時,針刺臂露出,可進行刺針拾取,此狀態(tài)下可進行取種或攜種,如圖13b所示。
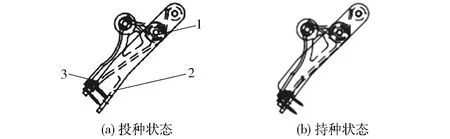
圖13 刺針播種臂工作狀態(tài)Fig.13 Working states of needle type seeding arm1.凸輪機構(gòu) 2.定臂 3.動臂
刺針式種薯分離整列拾取裝置與技術(shù)的研究主要集中在美國,廣泛應用在20世紀90年代,該類型分離整列拾取裝置對種薯的大小和形狀要求非常低,可以適應各種類型的種薯,而不會對排種穩(wěn)定性和均勻性產(chǎn)生較大影響,單獨從排種性能考慮,刺針式分離整列拾取裝置是最優(yōu)選擇。但是由于其拾取過程中刺針需要反復刺入種薯,一旦某顆種薯有病變,便有可能交叉感染,造成病變廣泛傳播,影響馬鈴薯產(chǎn)量和品質(zhì)[72-73]。代表機型為美國Lockwood公司生產(chǎn)的Lockwood 6200系列,如圖14為Lockwood 6200-4100型馬鈴薯播種機,作業(yè)行數(shù)為4行,由拖拉機牽引進行作業(yè),配套動力為75 kW,種箱容量達1.8 t,作業(yè)速度最高可達9.6 km/h。

圖14 Lockwood 6200-4100型馬鈴薯播種機Fig.14 Lockwood 6200-4100 potato planter
2.3.5其他種薯分離整列拾取技術(shù)與裝置
2.3.5.1機械夾持
機械夾持式種薯分離整列拾取裝置,又稱為指夾式馬鈴薯排種器[74-75],其結(jié)構(gòu)原理如圖15所示。

圖15 機械夾持式種薯分離整列拾取裝置結(jié)構(gòu)簡圖Fig.15 Structure schematic diagram of mechanical clamping seed potato separation and picking device1.排種盤 2.夾指 3.勺盤 4.種勺 5.夾指彈簧 6.夾指拐臂 7.夾指導軌
排種盤的軸線呈水平安裝,排種盤的下半部浸沒于種箱的種薯群中。沿排種盤圓周均布若干夾指、勺盤和種勺。夾指在夾指彈簧的作用下,呈常閉狀態(tài)。當某個夾指旋轉(zhuǎn)到取種區(qū)時,夾指拐臂碰到夾指導軌,迫使夾指張開,種薯進入夾指與種勺之間;當該夾指轉(zhuǎn)過夾指導軌后,在夾指彈簧的作用下,夾指夾住種薯,并攜帶種薯繼續(xù)旋轉(zhuǎn)。當該夾指轉(zhuǎn)到投種區(qū)時,夾指拐臂遇到另一組夾指導軌,迫使該夾指張開,種薯自其中脫落。
由于夾指導軌的曲線形狀一定,夾指的開閉行程也就一定,而種薯的幾何尺寸、形狀總是存在差異,該裝置難免存在較大的重漏播率。該原理在玉米、大豆等小粒徑作物的排種器中有一定的應用[76-78],而在馬鈴薯播種機中,僅Lockwood等少數(shù)廠商提供了能夠?qū)嶋H應用的機型。表4為Lockwood 500系列馬鈴薯播種機3種機型及基本技術(shù)參數(shù),該機具最高作業(yè)速度為10.5 km/h。

表4 Lockwood 500系列機型基本技術(shù)參數(shù)Tab.4 Basic technical parameters of Lockwood 500 series
2.3.5.2分離轉(zhuǎn)盤整列
采用取種轉(zhuǎn)盤式排種裝置,圓盤狀的取種轉(zhuǎn)盤上均勻分布放射狀的隔板,將轉(zhuǎn)盤分成若干小格,工作時種薯從種箱滑出,經(jīng)人工輔助放到取種轉(zhuǎn)盤的格內(nèi),經(jīng)由排種管落入種溝,該排種器對種薯的尺寸和形狀沒有要求,可播種不規(guī)則薯塊,且排種過程不傷種、不卡種,漏播指數(shù)和重播指數(shù)低,但需要人工放種,未能完全實現(xiàn)自動化播種,勞動強度較大,作業(yè)效率低[79-80]。

圖16 利用人工分離轉(zhuǎn)盤整列原理的播種機Fig.16 Semi-auto planter with separating disks
圖16為東北農(nóng)業(yè)大學團隊利用該原理研發(fā)的兩種半自動馬鈴薯播種機。該機既可以播種整薯、切塊薯,也可以播種微型薯,適用于小地塊以及小區(qū)育種,2行作業(yè)效率為0.13 hm2/h,4行作業(yè)效率為0.4 hm2/h,可播種株距為13~39 cm,播深為5~10 cm,由于人工輔助作業(yè),該機重漏播率在1%以下。
2.3.5.3振動分離整列人工清(補)種
振動分離整列人工清(補)種結(jié)構(gòu)原理如圖17所示。

圖17 振動分離整列人工清(補)種原理圖Fig.17 Principle diagram of vibration separation with man-aided1.種箱 2.抖動輪 3.輸種帶 4.開口調(diào)節(jié)板 5.手動清(補)種
輸種帶外表面上等距分布一定尺寸的圓弧凹槽,由驅(qū)動帶輪使之沿圖示方向運動。由于圓弧凹槽的尺寸一定,而種薯(包括整薯和切塊薯)的外形尺寸有一定的偏差,所以在輸種過程中,很難保證每個凹槽中恰好容納一個種薯,因此需要人工對輸種帶進行監(jiān)視和清(補)種[76,81-82]。由于受人工能力所限,采用該原理的播種機的作業(yè)速度不會超過2 km/h。圖18為日本JAGIRL型振動分離整列人工清(補)種馬鈴薯播種機,適用于較小地塊及小區(qū)播種作業(yè)。

圖18 JAGIRL型人工清(補)種馬鈴薯播種機Fig.18 JAGIRL man-aided potato planter
2.4 零速投種技術(shù)與裝備
零速投種[83]一直都是機械化播種中的技術(shù)難點,由于播種機進行播種作業(yè)時,機具會沿前進方向有一定速度,使種子脫離排種裝置后不能按預定投種位置垂直投放,而近似為斜拋運動,造成種子著陸種床的位置發(fā)生偏移,甚至發(fā)生種子彈跳,降低播種機的播種質(zhì)量。而馬鈴薯種塊質(zhì)量較大,隨著作業(yè)速度的提高,這種負面效果更加嚴重[84-86]。
2.4.1導種技術(shù)
目前,現(xiàn)有技術(shù)仍做不到絕對的零速投種。大多數(shù)馬鈴薯排種裝置通過設計合理的導種裝置結(jié)構(gòu)曲線,種子受重力下降,途經(jīng)曲面導種裝置,導種裝置可使種薯沿播種機前進反方向加速,使種薯獲得與播種機前進速度方向相反的水平分速度,進而趨近于零速投種[87-89],其結(jié)構(gòu)組成及在種薯分離整列裝置上的安裝位置如圖19所示。
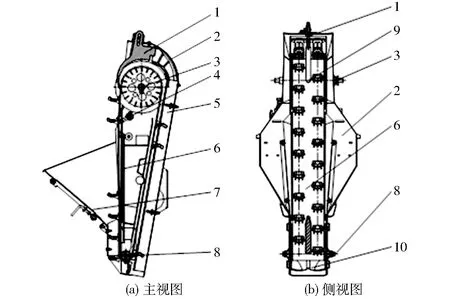
圖19 加裝導流板的馬鈴薯排種裝置結(jié)構(gòu)簡圖Fig.19 Schematic structure of potato seedling device with guide plate1.導種組件 2.排種架 3.主動輪 4.清種部件 5.排種導板6.排種帶 7.充種箱 8.從動帶輪組合 9.擋種部件 10.導流板
帶勺式種薯分離整列拾取裝置的工作過程中,會在頂部將種勺內(nèi)的種薯投擲到上一種勺的背部,這一過程會引起種薯做拋起運動,影響正常種薯運動軌跡,所以在帶勺式裝置上方安裝導種組件,為防止損傷種薯,導種組件通常為柔性材質(zhì)。在裝置投種下方安裝導流板,導流板可一定程度上使種薯具有與機具前進速度方向相反的速度,從而降低播種前進方向的偏移,做到趨近于零速投種。
該導種裝置具有結(jié)構(gòu)簡單、通用性好、排種質(zhì)量穩(wěn)定、均勻性好等優(yōu)點,被廣泛應用在帶勺式的種薯分離整列裝置上[90-91]。但也存在一定缺點,如種子在導種裝置內(nèi)需要獲得足夠的向后水平分速度,同時投種點須有足夠高度,這樣反而又增加了種子落地時垂直分速度,會提高種子落地后的彈跳概率;且實際作業(yè)時受機具振動等因素影響,種子在導種裝置內(nèi)若與裝置罩殼發(fā)生碰撞,反而會一定程度上降低排種均勻性[92-95]。
大多數(shù)帶勺式種薯分離整列裝置都會加裝導種裝置,以比利時AVR公司生產(chǎn)的Ceres 400型帶勺式馬鈴薯播種機為例,如圖20所示,該排種裝置上方安裝柔性導種組件,下方安裝導流裝置。

圖20 AVR Ceres 400型馬鈴薯播種機Fig.20 AVR Ceres 400 potato planter
圖21為東北農(nóng)業(yè)大學研制的2CM系列馬鈴薯施肥播種機,有2行和4行兩種機型。2行配套動力為48~73 kW,4行配套動力為88~118 kW。播種機自身較輕,該機具在北方一季作區(qū)被廣泛應用,其性能穩(wěn)定,在帶勺式種薯分離整列拾取裝置中安裝有導種、導流裝置,提高了該機具的播種效果;覆土裝置采用覆土犁鏵,更符合北方粘壤土條件的覆土作業(yè)。

圖21 2CM系列馬鈴薯施肥播種機Fig.21 2CM series potato fertilizer planter
2.4.2正壓吹種技術(shù)
東北農(nóng)業(yè)大學馬鈴薯機械研究團隊提出了利用正壓氣流為投出的種薯沿播種機前進反向加速,力求種薯脫離吸種臂開始下落時水平方向分速度趨近于零[96]。結(jié)合具體作業(yè)速度,并準確調(diào)節(jié)正壓氣流的大小和投種時的正壓氣室位置及所占角度,理論上就可以達到零速投種。
2.5 動態(tài)供種技術(shù)與裝備
為提高播種效率,馬鈴薯播種機在種箱中會攜帶大量種薯,以減少停車次數(shù),但大量的種薯在種箱中會自然堆積,影響排種裝置在取種區(qū)的取種效果,一定程度上會造成重漏播,進而影響播種效果。同時對于高速作業(yè)條件下排種裝置在取種區(qū)供種料位變化快、供種穩(wěn)定性差,嚴重影響準確取種和穩(wěn)定攜種的問題,若保證排種裝置取種區(qū)內(nèi)種面高度水平動態(tài)恒定,控制供種裝置向排種裝置內(nèi)輸送的種薯量,可實現(xiàn)高速作業(yè)條件下株距和重漏播率的穩(wěn)定性[97-98]。
為達到上述目的,目前播種機種箱均會設計主種箱和分種箱,主種箱較大,可為播種機承載大量種薯;分種箱較小,與排種裝置相連,控制分種箱內(nèi)種薯數(shù)量就可為排種裝置提供一個的穩(wěn)定、定量的取種區(qū)域。為保證主種箱可穩(wěn)定為分種箱提供種薯,同時保證分種箱內(nèi)的種薯數(shù)量一定,提出了一種動態(tài)供種控制技術(shù)。
動態(tài)供種技術(shù)的工作控制原理圖如圖22所示,系統(tǒng)由供種驅(qū)動機構(gòu)、料位傳感器、供種執(zhí)行機構(gòu)等部件組成。分種箱內(nèi)的種薯高度是系統(tǒng)的輸入量,經(jīng)由供種執(zhí)行機構(gòu)進入分種箱的種薯數(shù)量是系統(tǒng)的輸出量。輸入量與輸出量的差,由料位傳感器檢測、放大后,驅(qū)動供種驅(qū)動機構(gòu)動作,進而控制下部種箱中的種薯高度水平動態(tài)恒定。

圖22 動態(tài)供種控制原理圖Fig.22 Dynamic seed supply control schematic diagram
國內(nèi)以東北農(nóng)業(yè)大學馬鈴薯機械研究團隊提出的動態(tài)供種裝置為例,如圖23所示,動態(tài)供種系統(tǒng)由主種箱、供種電機、料位傳感器、供種輸送裝置和分種箱等部件組成。動態(tài)供種裝置向排種裝置本體輸送種薯,在排種裝置本體的種箱內(nèi)部安裝有料位傳感器,當種箱中種面高度達到高位目標值時,料位傳感器發(fā)出信號,使動態(tài)供種裝置停止輸送種薯;隨著排種裝置不斷排出種薯,種箱中種面高度下降,達到低位目標值時,料位傳感器再次發(fā)出信號,重新啟動供種裝置繼續(xù)輸送種薯,以此方法保證種箱中種面高度相對恒定。一個分種箱安裝兩排動態(tài)供種裝置,以便為分種箱平衡供給種薯,該動態(tài)供種系統(tǒng)中的供種輸送裝置采用鏈板式,以降低輸送過程對種薯的損傷[99]。
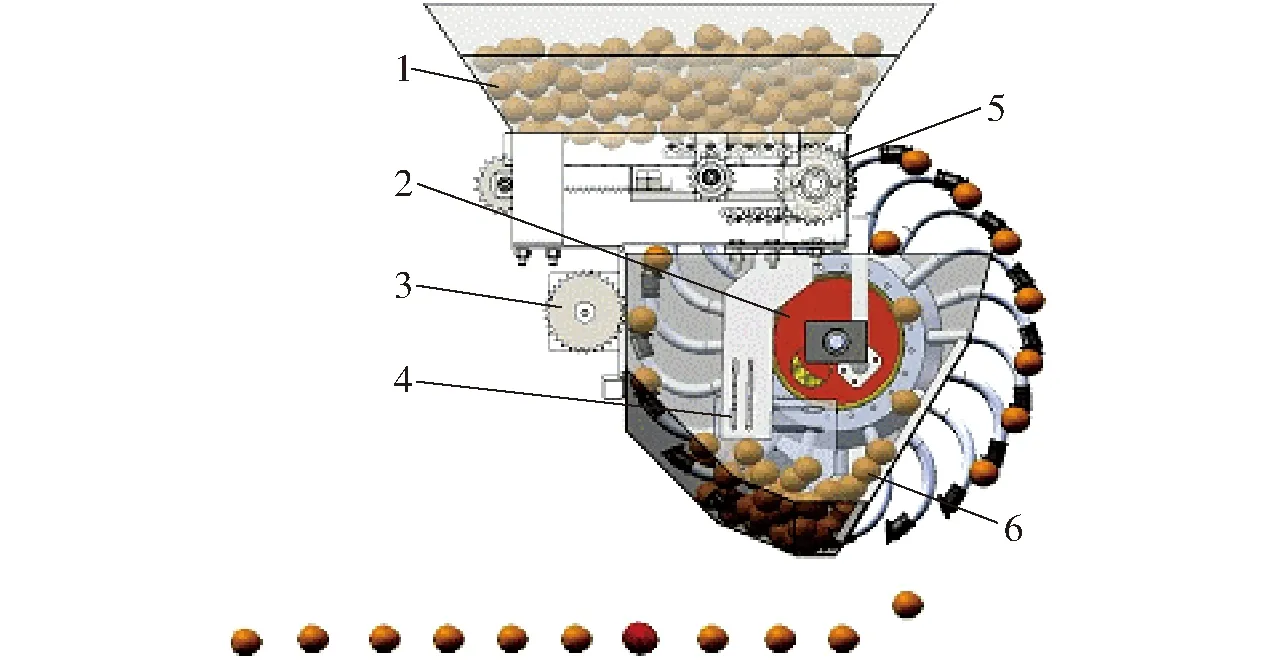
圖23 動態(tài)供種系統(tǒng)原理圖Fig.23 Dynamic seed supply system1.主種箱 2.排種裝置本體 3.供種電機 4.料位傳感器 5.供種輸送裝置 6.分種箱
國外無論是大型馬鈴薯播種機還是中小型馬鈴薯播種機,大多采用動態(tài)供種技術(shù)。以Spudnik公司設計的馬鈴薯播種機為例,其播種單體的結(jié)構(gòu)如圖24所示,采用動態(tài)供種技術(shù),通過液壓驅(qū)動供種裝置,從主種箱向播種單體分種箱內(nèi)進行供種,設置分種箱內(nèi)的種薯水平面,通過可調(diào)節(jié)式傳感器進行控制,確保供種輸送裝置可根據(jù)分種箱內(nèi)的薯面高度實時供種,該輸送裝置采用輸送鏈桿,上薯量穩(wěn)定,供種性能好,同時可防止主種箱內(nèi)的種薯架空結(jié)拱[100]。

圖24 Spudnik播種機播種單體Fig.24 Seeding unit on Spudnik planter1.主種箱 2.動態(tài)供種裝置 3.分種箱
Spudnik公司在馬鈴薯種植機械上的發(fā)展趨向于高效、大規(guī)模作業(yè),Spudnik設計生產(chǎn)的Spudnik 8069、8020、8312系列馬鈴薯種植機,一次性播種9~12行,其作業(yè)效率高。以Spudnik最新設計生產(chǎn)的8312型馬鈴薯種植機為例,如圖25所示,其作業(yè)行數(shù)為12行,整機工作寬度達到10.9 m,區(qū)別于傳統(tǒng)大型播種機,該機采用創(chuàng)新的兩側(cè)折疊升降技術(shù),可將整機進行折疊,為提高折疊利用效率,將兩側(cè)播種單體略前置于中心播種區(qū)域,折疊后的運輸寬度可縮小至6.7 m;其具備超大種薯料斗箱,一次可容納16 t種薯,所需配套動力225 kW以上;集成Spudnik的多行馬鈴薯種植機的特點,將播種單體、開溝裝置和覆土裝置設計為一體,增加空間利用率。

圖25 Spudnik 8312型馬鈴薯播種機Fig.25 Spudnik 8312 potato planter
為滿足大型高速播種,采用將播種機料斗箱與播種單體分離的形式,由動態(tài)供種裝置進行從主種箱精準定量輸入種薯,兩側(cè)的播種單體由于前置,且與中心區(qū)域的主種箱較遠,為滿足兩側(cè)播種單體的播種作業(yè),將動態(tài)供種裝置外置同時加長其輸送長度;其結(jié)構(gòu)外形如圖26所示。同時為配合高速精準作業(yè),其播種單體的驅(qū)動也由地輪改為液壓驅(qū)動,該機器顯著提高了播種作業(yè)效率。

圖26 Spudnik 8312型馬鈴薯播種機動態(tài)供種裝置Fig.26 Spudnik 8312 potato planter dynamic seeding device
目前,在動態(tài)供種技術(shù)上的升級,主要體現(xiàn)在料位檢測裝置上,運用超聲波檢測技術(shù)、紅外傳感技術(shù)或圖像識別技術(shù),精準穩(wěn)定識別分種箱內(nèi)的種薯數(shù)量變化,可以及時穩(wěn)定驅(qū)動供種裝置進行供種;其次體現(xiàn)供種裝置上,供種裝置的結(jié)構(gòu)原理雖各有不同,但其發(fā)展的趨勢是精量穩(wěn)定供種和降低種薯損傷。
3 發(fā)展分析與展望
通過國內(nèi)企業(yè)、科研院所、高等院校的不懈努力,我國馬鈴薯播種機械已經(jīng)從被動仿制進入基礎理論研究、產(chǎn)品創(chuàng)新研發(fā)并舉時期,適應不同作業(yè)區(qū)域的低、中端馬鈴薯播種機械正逐步形成規(guī)模。圍繞馬鈴薯播種機械的各項研究已經(jīng)形成較成熟的技術(shù)體系。一些技術(shù)力量雄厚的科研院所和高校正在瞄準國際先進的馬鈴薯播種機械技術(shù),進入高端技術(shù)研究和研發(fā)階段。針對馬鈴薯播種機械技術(shù),未來將從以下方面取得長足的進展:
(1)自動化、智能化技術(shù)在馬鈴薯播種機械上的應用。一些發(fā)達國家的高端馬鈴薯播種機械已經(jīng)廣泛采用了智能檢測與控制技術(shù)、機-電-液-氣力驅(qū)動技術(shù)等,這些技術(shù)的采用,一方面提高了馬鈴薯播種機的作業(yè)精度和效率,另一方面,實現(xiàn)了良好的人機環(huán)境,減輕了勞動強度和用工數(shù)量,國內(nèi)馬鈴薯機械化種植也將逐步向自動化、智能化方向發(fā)展。
(2)我國馬鈴薯種植區(qū)域廣泛,地理條件和農(nóng)藝的多樣性決定了在今后相當長的一段時間內(nèi),工藝原理、機械結(jié)構(gòu)簡單的小型馬鈴薯播種機與自動化程度、作業(yè)效率高的大型馬鈴薯播種機將長期并存,以適應不同種植區(qū)域的需求。因此,應同時投入相應的研發(fā)力量,研發(fā)適合南方二季作區(qū)、西南單雙季混作區(qū)特點、性能可靠的種薯分離整列技術(shù)與裝置。
(3)排種器是播種機的核心部件,而馬鈴薯種薯幾何尺寸大、質(zhì)量大的特點決定了馬鈴薯排種器的負載較其他作物排種器的負載大。在新材料、表面處理、熱處理、制造工藝等方面,將先進的制造技術(shù)融入排種器以及整機的制造過程當中,以提高馬鈴薯播種機性能的穩(wěn)定性和可靠性。根據(jù)我國地域種植特點,未來我國馬鈴薯機械化種植技術(shù)和裝備的發(fā)展將以精量、高速、智能化大型馬鈴薯播種技術(shù)及裝備為核心,同步研發(fā)經(jīng)濟、輕簡型馬鈴薯機械化種植技術(shù)及裝備為主要發(fā)展方向。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08