自抗擾控制技術在電動缸伺服系統中的研究
2019-03-27 08:49:16秦幸妮劉彥艷
火炮發射與控制學報 2019年1期
秦幸妮,姜 明,劉彥艷,潘 軍
(1.西北機電工程研究所,陜西 咸陽 712099;2.中國人民解放軍63961部隊,北京 100012)
為提高系統的的戰技指標,某大口徑艦炮高低系統采用電動缸傳動方式。電動缸作為一種新穎的機電一體化產品,具備高精度,高傳動效率,響應快,承載能力范圍寬,適應性強,壽命長,易于維護、保養等優點,在航空航天、武器裝備等領域得到越來越多的關注與應用。
段學超在設計大型射電望遠鏡中采用帶前饋的數字PID伺服濾波器實現電動缸的高精度軌跡跟蹤[1]。鄧飆等在雙電動缸起豎設備的設計中采用模糊PD同步控制器,有效抑制啟動段的同步誤差及克服負載擾動對同步誤差的影響[2]。陳國迎等在轉向臺架加載系統的研究中采用PID力閉環控制和串聯校正方法使電動伺服系統加載力能快速跟蹤目標值,同時減小擾動下多余力的影響[3]。
筆者對采用電動缸驅動的大慣量伺服系統進行分析,得出電機轉動與身管轉動存在非線性關系。為提高系統的穩定性和控制精度,將自抗擾控制技術應用于某艦炮高低系統。基于Simulink平臺進行建模仿真,并與傳統PID控制的結果進行對比分析。
1 電動缸伺服系統分析
電動缸伺服系統的運動示意圖如圖1所示。

圖1中,O為火炮身管回轉中心,O1為電動缸下支點,O2為電動缸上支點。電動缸推桿的伸縮帶動火炮身管的轉動。 轉臂半徑為R,電動缸下支點到回轉中心的距離為L1,電動缸的閉合長度為L2,推桿伸出長度為x,減速比i,絲杠導程s。
電動缸推桿伸出量為0時,火炮身管處于最低角,當推桿伸長時火炮身管轉動α,需要計算出電機轉動的機械角度θ0和火炮身管轉動角度α的關系。
根據余弦定理可以推導出:
(1)
可以得到:
(2)
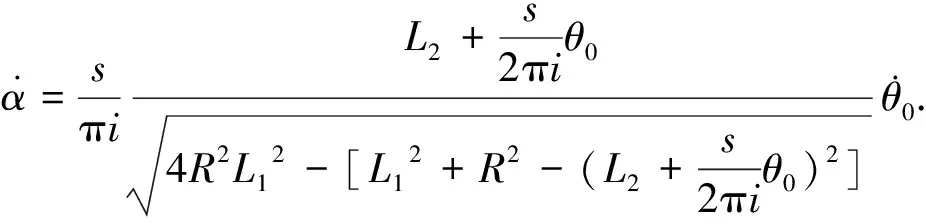
(3)
由式(2)可以看到α與θ0為非線性運動關系。由式(3)可以看到高低系統調炮速度與電機轉速呈非線性關系。因此,考慮將自抗擾控制技術應用于電動缸伺服系統。
2 自抗擾控制器設計
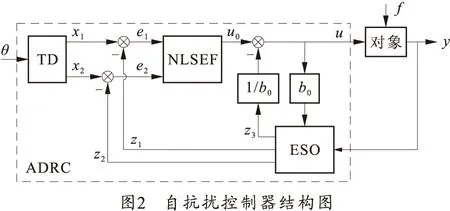
自抗擾控制器(ADRC)包含3 個部分[4]: 跟蹤微分器(TD),擴張狀態觀測器(ESO)和非線性反饋控制器(NLSEF),如圖2所示, 圖中b0為可調參數,θ為給定輸入角度,y為被控對象輸出角度,f為外界干擾,x1和x2為TD的輸出,z1、z2和z3為ESO的輸出,u0為NLSEF輸出,u為ADRC控制器輸出。
2.1 跟蹤微分器(TD)
根據輸入角度θ安排過渡過程及提取微分信號[5]。
(4)
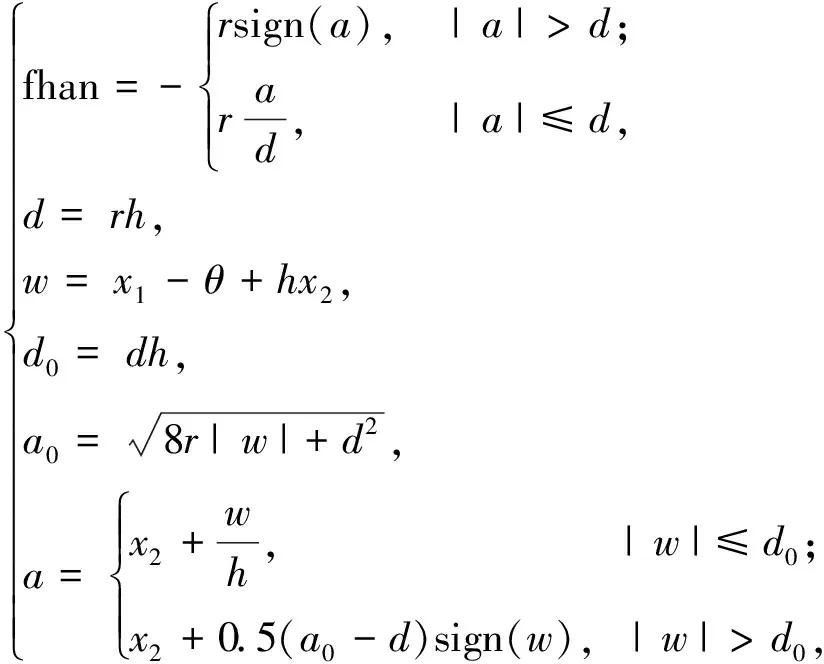
式中:h為積分步長;r決定跟蹤快慢;h0決定濾波作用[6]。
2.2 擴張狀態觀測器(ESO)
根據輸出角度y和控制量u估計系統狀態和擾動[7]:
(5)
β1、β2、β3為誤差校正增益;a1、a2為非線性因子;δ為濾波因子。
2.3 非線性反饋控制器(NLSEF)
狀態誤差的非線性反饋律及擾動補償[8]。
(6)
式中:β01為誤差增益;β02為誤差微分增益;a01、a02為非線性因子;b0為補償因子。
3 電動缸伺服系統數字仿真
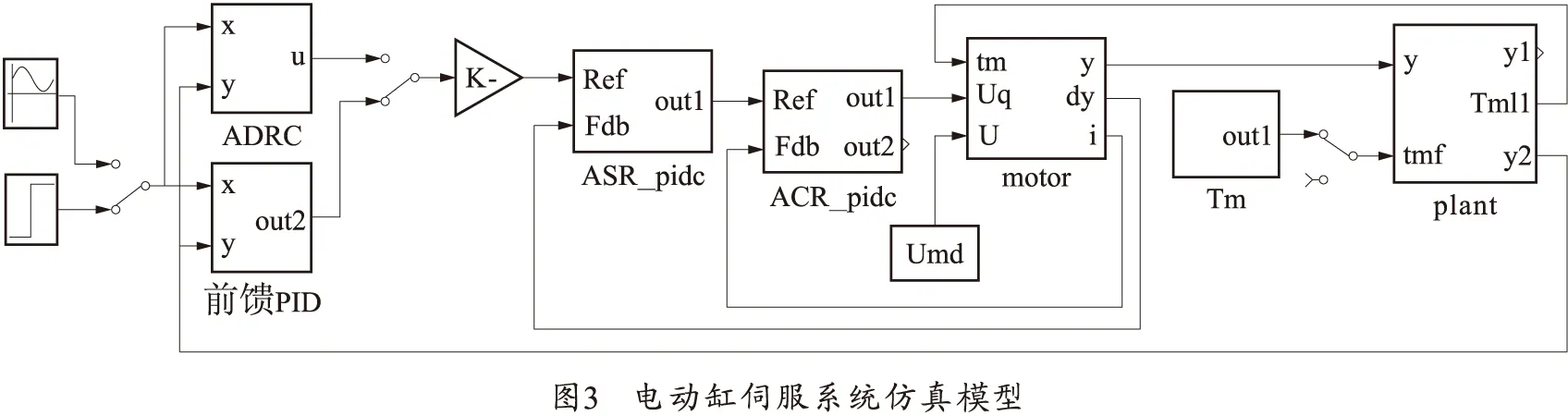
高低系統采用位置環、速度環、電流環組成的三環結構控制[9]。根據上節分析,在位置環應用自抗擾控制技術,通過對電機轉速的控制,驅動火炮跟蹤瞄準。在Simulink中建立電動缸伺服系統仿真模型,如圖3所示。
系統部分參數:J=71 800 kg·m2,Tmc=2 200 N·m,Trd=8 000 N·m。電動缸的電機參數:n=3 000 r/min,Tm=636 N·m,Imd=460 A,Jm=0.8 kg·m2,Ci=2.5,減速器傳動機構空回為0.333°。
為了驗證設計的自抗擾控制器的優越性,對采用帶前饋PID 控制器及自抗擾控制器(ADRC)的伺服系統分別進行Simulink 仿真分析。
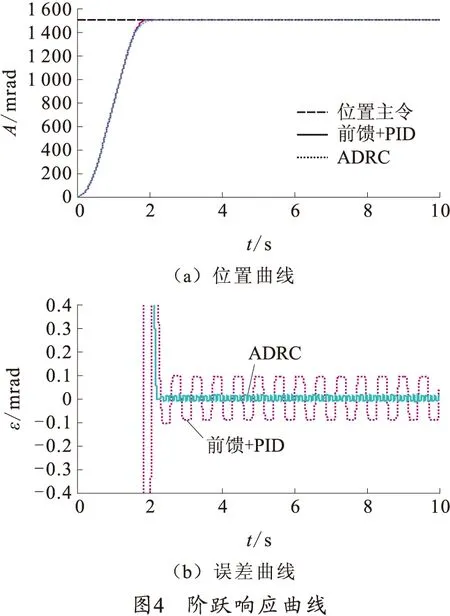
調炮1 500 mrad,帶前饋PID控制系統、自抗擾控制系統的階躍響應曲線如圖4所示。由圖4可知,帶前饋PID控制系統的調炮誤差不大于0.09 mrad;ADRC控制系統的調炮誤差不大于0.02 mrad,響應速度快,且無振蕩與超調,驗證了ADRC控制技術使高低系統具有良好的階躍跟蹤性能。
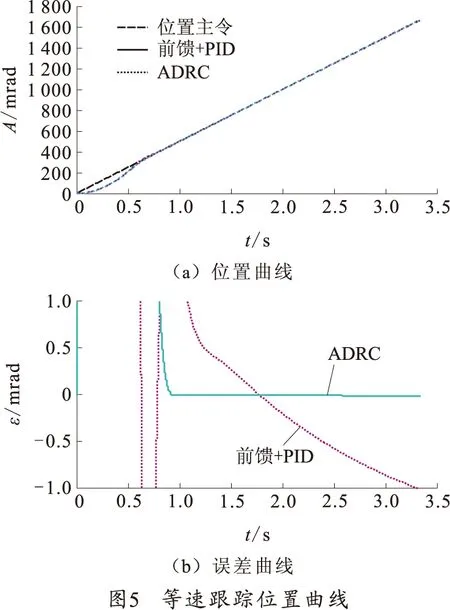
高低系統以30 °/s的調炮速度進行仿真實驗,帶前饋PID控制系統、自抗擾控制系統的跟蹤位置曲線如圖5所示。由圖5可知,帶前饋PID控制系統的跟蹤誤差不大于1.01 mrad;ADRC控制系統的跟蹤誤差不大于0.02 mrad。采用ADRC控制技術使系統能更快、更準確地跟蹤位置主令,驗證了ADRC控制技術使高低系統具有良好的等速跟蹤性能。
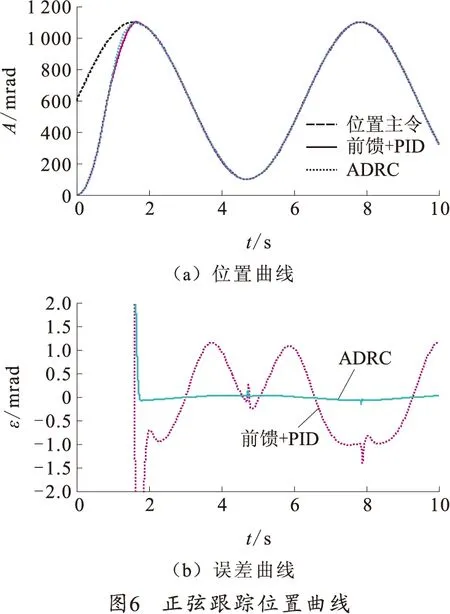
高低系統進行振幅30°,周期為6.28 s的正弦跟蹤,帶前饋PID控制系統、自抗擾控制系統的跟蹤位置曲線如圖6所示。由圖6可知,帶前饋PID控制系統的跟蹤誤差不大于1.45 mrad;ADRC控制系統的跟蹤誤差不大于0.17 mrad。ADRC控制系統的位置反饋曲線緊緊跟隨位置主令,將誤差值控制在較小范圍內,驗證了ADRC控制技術使高低系統具有良好的正弦跟蹤性能。
4 結束語
針對某艦炮高低電動缸伺服系統中的非線性環節,采用自抗擾控制技術進行仿真研究。通過與經典控制器仿真對比及分析, 表明了ADRC控制的優越性,從而為電動缸伺服系統設計提供了一種新的技術途徑。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
建材發展導向(2019年13期)2019-08-24 06:37:40
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:16:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
上海大中型電機(2017年4期)2017-02-06 05:27:06
照明工程學報(2016年3期)2016-06-01 12:17:56