基于RFID的車載定位定向技術(shù)研究與應(yīng)用
2019-03-27 08:49:14仲啟媛譚立龍張彥濤
火炮發(fā)射與控制學(xué)報 2019年1期
陳 思,仲啟媛,譚立龍,王 鵬,張彥濤
(火箭軍工程大學(xué),陜西 西安 710025)
發(fā)射車車載定位定向技術(shù)是實現(xiàn)導(dǎo)彈無預(yù)設(shè)陣地機動發(fā)射的關(guān)鍵技術(shù),本質(zhì)是指車載導(dǎo)航系統(tǒng)在發(fā)射車行進過程中實時提供精確的經(jīng)緯度、高程、北向方位角和姿態(tài)角等導(dǎo)彈瞄準(zhǔn)與發(fā)射所需的基本信息[1]。基于作戰(zhàn)應(yīng)用的車載定位定向系統(tǒng)要求具有自主性、快速性、精確性和抗干擾性。從國內(nèi)外發(fā)展歷程上看,捷聯(lián)慣導(dǎo)系統(tǒng)(SINS)憑借其完全自主性和實用性得到廣泛認(rèn)可,但由于誤差隨時間累積而不能長時單一使用[2];最初采用零速修正或地標(biāo)點停車修正方式[3]的車載導(dǎo)航因其削弱了車載發(fā)射的機動性不被青睞;采用捷聯(lián)慣導(dǎo)(SINS)/GPS組合導(dǎo)航系統(tǒng)[4]雖然抑制了誤差發(fā)散,但GPS信號易受遮擋且技術(shù)被他國控制,因此不能作戰(zhàn)使用,即使采用國產(chǎn)北斗定位也存在衛(wèi)星信號被干擾等類似問題;采用地圖匹配技術(shù)[5]輔助有一定效果,但存在地圖精度要求高、數(shù)據(jù)處理技術(shù)也有較高要求等問題;SINS/里程計(OD)組合導(dǎo)航采用航位推算技術(shù)自主性好,誤差發(fā)散得到一定程度抑制,但由于車輪空轉(zhuǎn)、打滑等導(dǎo)致長時導(dǎo)航誤差也較大[6]。
近年來,物聯(lián)網(wǎng)技術(shù)迅猛發(fā)展,帶動了射頻識別技術(shù)(RFID,Radio Frequency Identification Devices)快速提升與應(yīng)用。RFID利用射頻信號將儲存于標(biāo)簽內(nèi)的信息傳送給RFID閱讀器,是一種新興的識別與定位手段,具有構(gòu)造簡單、壽命長、抗惡劣環(huán)境、非接觸、快速、安全、準(zhǔn)確、價廉(軍用標(biāo)簽10美分左右)等優(yōu)勢[7]。近年來軍用射頻標(biāo)簽被應(yīng)用于軍事物流、軍車定位等領(lǐng)域,尤其是近期美國在全源定位與導(dǎo)航項目(ASPN)中將RFID作為一種重要的傳感器,但沒有詳細(xì)公開具體使用方式[8]。在發(fā)射車作戰(zhàn)區(qū)域內(nèi)設(shè)置射頻定位系統(tǒng),輔助車載定位定向,具有可期的前景。
1 RFID定位系統(tǒng)的設(shè)計
1.1 RFID工作原理
RFID由標(biāo)簽、閱讀器、天線3部分組成,標(biāo)簽存儲數(shù)字信息,讀寫器控制射頻模塊通過天線發(fā)射射頻信號,讀取對應(yīng)標(biāo)簽信息,如圖1所示。RFID可識別高速運動物體,能夠穿透塑料等材質(zhì)進行識別并可同時識別多個標(biāo)簽[9]。

1.2 發(fā)射車?yán)肦FID定位方案設(shè)計
標(biāo)簽分為無源標(biāo)簽和有源標(biāo)簽,鑒于作戰(zhàn)使用采用無源標(biāo)簽并進行加密處理;閱讀器可采用超高頻閱讀器,其識別標(biāo)簽并讀取內(nèi)置信息時間為幾十毫秒;識別距離可根據(jù)需求調(diào)節(jié)選用功率,幾十米內(nèi)的識別距離均可選。
1.2.1 路面鋪設(shè)射頻標(biāo)簽法
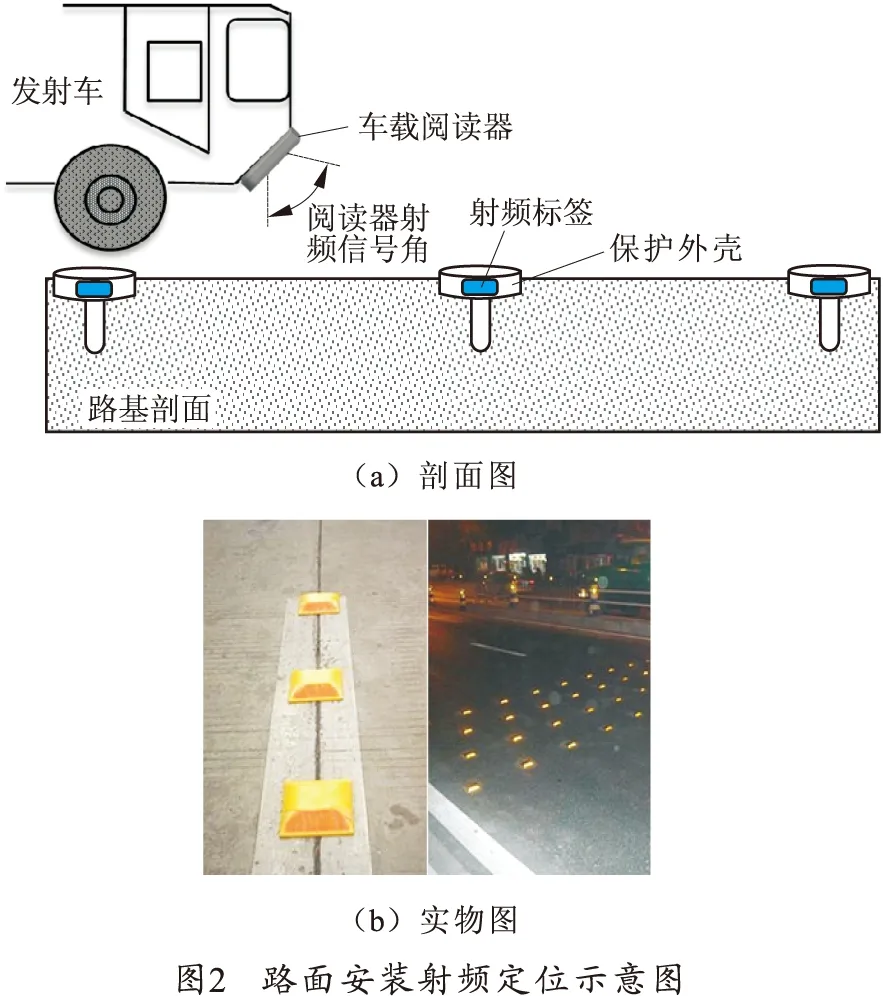
射頻標(biāo)簽鋪設(shè)于車道路面中央,標(biāo)簽內(nèi)儲存該位置地理信息代碼(經(jīng)緯度、高程等),閱讀器安裝在發(fā)射車底部,車輛通過標(biāo)簽上方時,識別讀取傳送至車載計算機,迅速與車載慣性導(dǎo)航系統(tǒng)定位信息進行融合處理。考慮到碾壓破壞等問題,可采用凹陷下沉或鑲嵌在反光路鈕內(nèi)側(cè)的方法,如圖2所示。
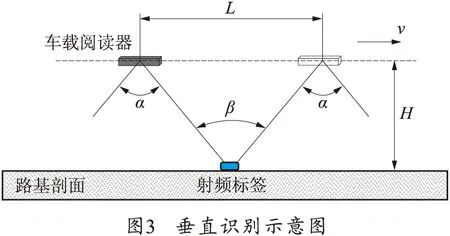
閱讀器的安裝有多種方式,為了滿足后文輔助初始對準(zhǔn)需求,采用垂直向下識別型進行分析。該方式閱讀器與標(biāo)簽簡化的幾何關(guān)系如圖3所示,其中v為載車速度,H為車載閱讀器中心點在發(fā)射車上安裝位置距離水平地面的高度,α為閱讀器發(fā)出射頻信號的輻射形成的扇面所張開的信號輻射角(即波瓣寬度),β為射頻標(biāo)簽被激活后發(fā)出的反饋信號輻射角(兩者均為空間類圓錐型輻射,在這里作平面分析處理),L為標(biāo)簽?zāi)芙邮盏介喿x器信號到閱讀器不能讀到標(biāo)簽反饋信號的極限條件下閱讀器在行車方向上的移動距離,并設(shè)這段可感知時間為t。
設(shè)完成單次超高頻射頻識別的識別時間為t0,由于識別時間很短,該時間內(nèi)行車速度幾乎無變化,可看成恒定值,由相應(yīng)的運動學(xué)和平面幾何關(guān)系可知,垂直向下識別時,行車方向絕對定位誤差為
(1)
為了保證至少完成一次識別,識別時間t0和可感知時間t之間應(yīng)滿足如下條件:
(2)
即行車速度v不能超過其最大值,否則在固定的RFID標(biāo)簽的錐角范圍內(nèi)無法有效識別標(biāo)簽,行車速度v需要滿足如下條件:
(3)
根據(jù)目前使用到的RFID實際技術(shù)指標(biāo)條件,選定閱讀器和標(biāo)簽的信號輻射錐角α=β=60°,單次射頻識別時間20 ms;戰(zhàn)車尤其是發(fā)射車在設(shè)計時要求適應(yīng)不同的戰(zhàn)場環(huán)境,具有很強的越野性能,因此車輛底盤高。廣泛查閱各型戰(zhàn)車結(jié)構(gòu)參數(shù),合理約束閱讀器安裝高度H<0.5 m。通過仿真分析得出最高速度與安裝高度關(guān)系,如圖4所示。
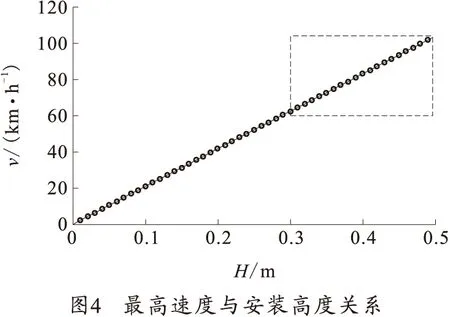
根據(jù)一般性使用經(jīng)驗,正常行車速度為30~60 km/h。由圖4可知,在上述條件下,垂直向下識別方式的行車速度要滿足使用條件,即大于60 km/h,則安裝高度應(yīng)滿足在H>0.3 m,再根據(jù)國內(nèi)外多型導(dǎo)彈發(fā)射車車體結(jié)構(gòu)參數(shù),劃定圖4中虛線框區(qū)域為最佳安裝范圍,工程實際可以此為參考。
設(shè)閱讀器安裝高度分別為H=0.3、0.4、0.5 m,通過仿真計算,考察不同車速下行車方向定位精度,如圖5所示。
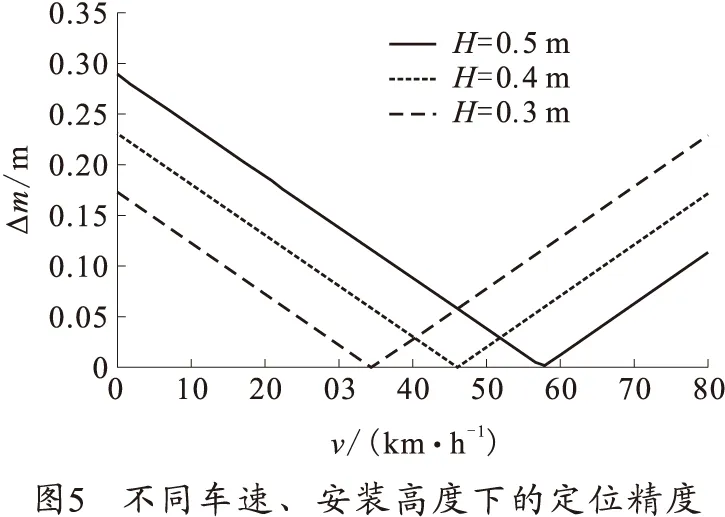
由圖5可知,垂直向下識別安裝方式的理論行車定位精度高,車輛速度20 km/h以上時,行車方向定位精度可達(dá)0.2 m以上。根據(jù)該仿真結(jié)果,綜合考慮實際使用車速情況、車輛底盤越野性能(底盤要具有一定高度的通過性)和標(biāo)簽錐角范圍內(nèi)信號可閱讀率,安裝高度H在0.4~0.5 m范圍內(nèi)取值較好。該方案經(jīng)行車驗證,識別定位精度能達(dá)到0.5 m以內(nèi),滿足行進間定位修正要求,而且無需停車,簡單易行。
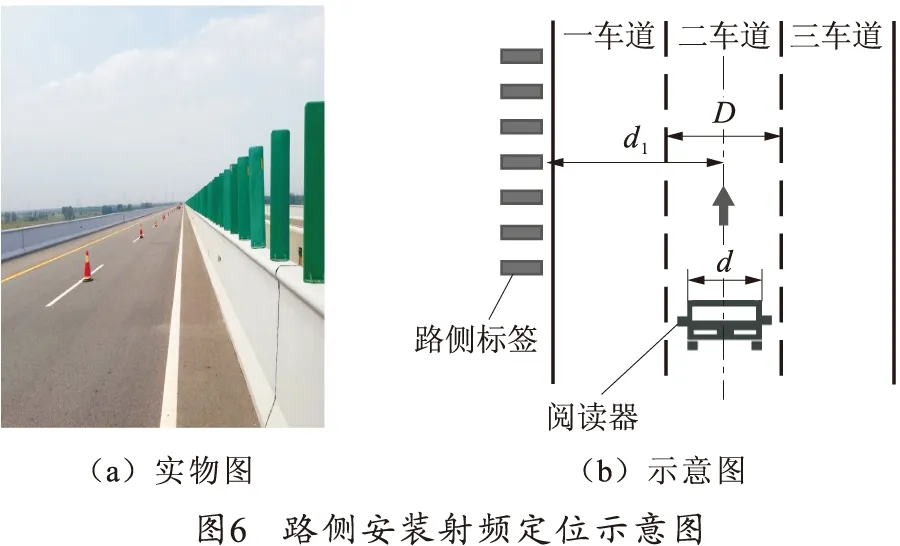
1.2.2 路側(cè)鋪設(shè)射頻標(biāo)簽法
射頻標(biāo)簽等距安裝在路中隔離帶或者路邊防護樁上,閱讀器安裝于發(fā)射車左(右)側(cè)與標(biāo)簽同高位置,在行進間讀取位置信息,稱之為路標(biāo)定位,如圖6所示。D為車道寬,d為發(fā)射車寬,d1為該標(biāo)簽垂直對應(yīng)車道中線處距離,標(biāo)簽內(nèi)存儲該標(biāo)簽垂直對應(yīng)車道中線處位置坐標(biāo)代碼。
根據(jù)問卷調(diào)查有特種超寬車輛駕駛經(jīng)驗的駕駛員可知,被調(diào)查人員百分之百表示駕駛車輛保持在單一車道內(nèi)行駛非常輕松容易。以此為實際可行條件進行定位誤差分析,并定義該方法為基于標(biāo)準(zhǔn)車道約束的車載RFID路側(cè)感知定位法。
由圖6可知,在發(fā)射車保持同一車道內(nèi)行駛條件下,橫向理論定位誤差為
(4)
縱向誤差由識別距離、識別角度和車速共同決定,如圖7所示。
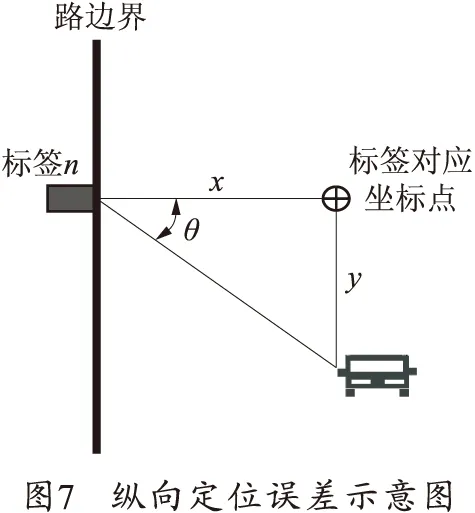
x、y分別為射頻卡接收到閱讀器發(fā)出射頻信號時兩者橫向距離和縱向距離,θ為標(biāo)簽接收到信號時角度,則縱向誤差為
δy=xtanθ-vt0,
(5)
則定位坐標(biāo)點概率偏差為
(6)
按國家道路標(biāo)準(zhǔn),1~4級公路單一行車道寬度均在3.5 m左右,例如高速公路車道寬3.75 m。參照俄羅斯“白楊”系列發(fā)射車標(biāo)準(zhǔn),假設(shè)取車寬3 m、接收信號角15°,以車速40 km/h行駛在二車道進行分析可得:δx=0.37 m,δy=1.28 m,則理論計算精度為δr=1.34 m,可以達(dá)到美國軍用GPS數(shù)量級。
在工程實際應(yīng)用時,通過調(diào)整射頻識別距離和功率、調(diào)整識別角度,在正常行車速度20~50 km/h情況下可以不用計算反應(yīng)距離,因為實地試驗時也無法測量,只需測量識別到標(biāo)簽時車輛實際位置與理論位置之差。在一段廢棄高速公路上進行實地試驗,標(biāo)簽間隔10 m,共計30個,鋪設(shè)300 m長距離,合理調(diào)節(jié)配置射頻識別參數(shù),試驗用民用大貨車(寬2.5 m)分別以20、30、50 km/h進入識別區(qū)域,以DGPS定位數(shù)據(jù)為參考基準(zhǔn),有效識別率達(dá)到97.7%,每組取24個試驗定位數(shù)據(jù)分析,定位偏差如表1所示。
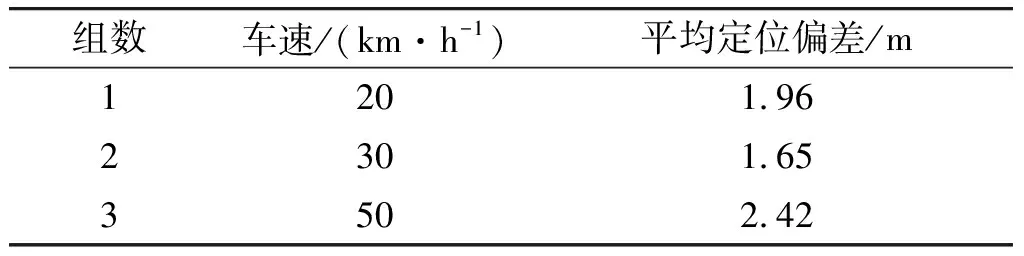
表1 不同車速下射頻定位偏差
1.2.3 洞庫/隧道鋪設(shè)射頻標(biāo)簽法
在長隧道或者洞庫頂壁上安裝多個閱讀器,識別貼于發(fā)射車上方的無源標(biāo)簽,在車輛正常行進中實時定位,并將定位信息通過數(shù)據(jù)鏈同步傳給車載計算機進行信息融合。根據(jù)清研訊科公司實驗室相關(guān)試驗表明,該方式下定位精度能達(dá)到0.3 m以上。相關(guān)硬件設(shè)施投入較大,但可以和民用RFID車輛識別發(fā)展思路契合,通過軍民融合方式解決隱蔽性和高成本問題。限于篇幅,在此不過多闡述此類較復(fù)雜方案原理。
2 RFID單點定位輔助動態(tài)初始對準(zhǔn)
SINS/OD組合車載定位定向具有完全自主性和相對長時高精度保持性。現(xiàn)階段利用SINS/OD進行組合導(dǎo)航的研究很多,許多科研院所進行了樣機研發(fā),相關(guān)跑車結(jié)果表明,長航時下,定位誤差仍發(fā)散變大甚至超出應(yīng)用要求。同時,大多都采用出發(fā)地進行原地初始對準(zhǔn)方式,分為粗對準(zhǔn)和精對準(zhǔn),其中精對準(zhǔn)耗時較長,約5 min左右,影響了作戰(zhàn)使用的效能。而RFID可以在戰(zhàn)區(qū)廣布置,恰好能彌補以上不足。借用“將衛(wèi)星定位移到地上,讓靜態(tài)地標(biāo)活動起來”的思想,利用上述RFID定位方案輔助進行行進間動態(tài)初始對準(zhǔn)和導(dǎo)航修正。
嚴(yán)恭敏等提出利用航位推算軌跡與真實軌跡相似性原理進行行進間動態(tài)初始精對準(zhǔn)方案[10],精度高,但由于預(yù)設(shè)地標(biāo)點停車定位的繁瑣性和耗時性限制了作戰(zhàn)應(yīng)用而被擱置。RFID定位精度達(dá)米級及以上時,可用于改進此方案,避免了龐大發(fā)射車找點定位的實際應(yīng)用困難。
2.1 RFID輔助動態(tài)初始對準(zhǔn)流程設(shè)計
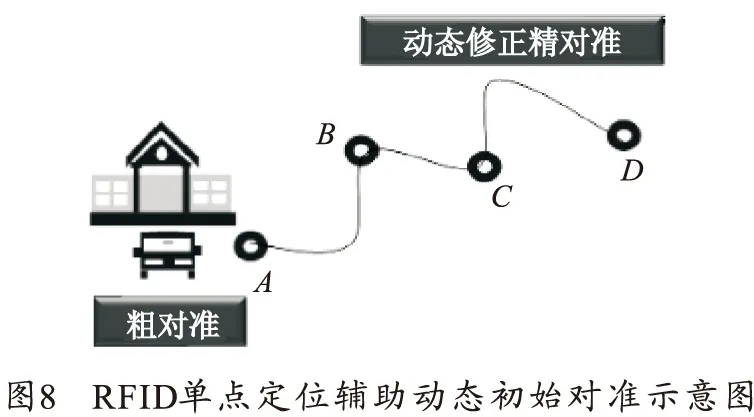
改進型動態(tài)初始對準(zhǔn)流程:先在出發(fā)點A進行30 s抗干擾粗對準(zhǔn),采用慣性系粗對準(zhǔn)方式,之后任意機動至多個RFID區(qū)域(B、C、D)進行精對準(zhǔn),通常一次修正方位角偏差可達(dá)角分級,由于RFID定位修正便捷快速,可進行多次迭代修正,進一步提高精度,如圖8所示。
2.2 對準(zhǔn)原理
2.2.1 粗對準(zhǔn)
應(yīng)對發(fā)動機振動、操作人員走動等干擾,可引用文獻[11]方法,進行抗干擾粗對準(zhǔn)。通過將初始姿態(tài)陣分解為3個矩陣鏈乘,由加速度計和陀螺輸出直接求解初始姿態(tài)陣:
(7)
符號具體定義參見文獻[11]。
2.2.2 動態(tài)修正精對準(zhǔn)
粗對準(zhǔn)后開始導(dǎo)航行進,其航位推算誤差主要由姿態(tài)偏差、陀螺漂移和里程計刻度系數(shù)誤差等引起,由于水平姿態(tài)誤差小,可忽略,在高精度陀螺漂移小和修正航時短的條件下,修正過程中可以認(rèn)為航向角誤差和里程計刻度系數(shù)誤差為常量φU和δKD,則可以利用航位推算軌跡與實際軌跡相似性原理,用航位誤差反向修正粗對準(zhǔn)航向角誤差,達(dá)到精對準(zhǔn)目的。
2.2.2.1 航位推算更新算法原理[12]
(8)
(9)
(10)
具體符號含義參考文獻[12]。
2.2.2.2 航位推算誤差分析
載車在地理位置變化不大的范圍內(nèi)行駛,即整個導(dǎo)航過程中導(dǎo)航坐標(biāo)系的旋轉(zhuǎn)變化不大,可當(dāng)作平面處理,在上述分析條件下,航位推算誤差主要由φU和δKD引起:

(11)
如圖9所示,SINS/OD在A點粗對準(zhǔn)產(chǎn)生航向偏差 ,開始沿任一線路繞行一圈回到A點。在行駛軌跡上任取一點C,則AC為真實位移,AB為對應(yīng)的航位推算位移。
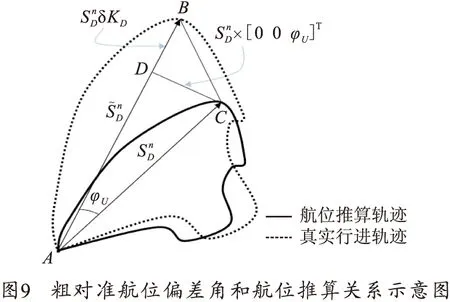
式(11)的幾何圖解意義是:真實位移AC繞天向軸轉(zhuǎn)動角度φU分得到AD;再乘以系數(shù)(1+δKD)得航位推算位移AB。由此可知軌跡上任一點均滿足此規(guī)律,因而航位推算軌跡和真實軌跡是幾何相似的,即以起始點A為中心點解算路線在整體上轉(zhuǎn)動了航向誤差角并擴大了由里程計誤差系數(shù)增加的誤差。可見,里程計誤差系數(shù)將引起沿著位移方向的誤差,而粗對準(zhǔn)航向偏差會引起垂直于位移方向的誤差,誤差和為CB。
2.2.2.3 航向偏差角修正
在B點由航位推算值和RFID精確定位值之差求得航位偏差角ΔφU后,可直接將導(dǎo)航計算出的B點的姿態(tài)矩陣進行修正更新,C、D點同理,即可達(dá)到輔助精對準(zhǔn)目的。
(12)
2.2.2.4 里程計刻度系數(shù)同步估計
設(shè)RFID修正點處定位誤差為ΔP,修正點位兩點間位移為ΔS,在ΔP遠(yuǎn)小于ΔS條件下,同步估計簡化式為
(13)
2.3 跑車試驗驗證
試驗用車載定位定向系統(tǒng)參數(shù)為:陀螺常值漂移0.01(°)/h,加速度計常值漂移0.1 mg,OD刻度系數(shù)誤差是0.013 1。
改進型初始對準(zhǔn)跑車試驗,如圖10所示,進行了約10.5 km跑車試驗。
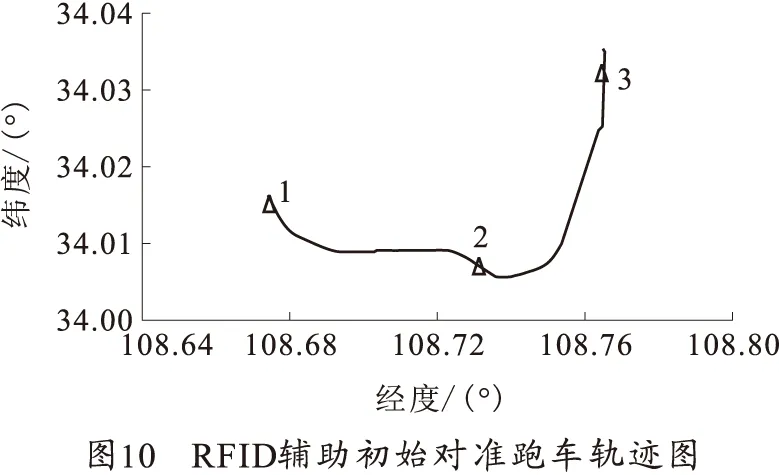
先在出發(fā)點1進行約30 s抗干擾粗對準(zhǔn),之后任意機動至RFID區(qū)域2進行修正,1、2點直線距離約5 km,RFID實測定位精度0.6 m,由于RFID定位修正便捷快速,可進行多次迭代修正,進一步提高精度,所以緊接著任意行進至RFID區(qū)域3再次修正,該點定位精度0.4 m,2、3點直線距離約4.5 km。慣組上安裝有棱鏡,可以用尋北儀測量對準(zhǔn)偏差。試驗結(jié)果如表2所示。
從模擬實際使用流程上看,整個初始對準(zhǔn)過程中,粗對準(zhǔn)抗干擾、耗時短,RFID輔助修正精對準(zhǔn)過程中,只需緩速行進路過RFID點位,識別上一點即可,不必刻意定某一點,避免了找點停車定位的繁瑣與不便,快捷迅速而且定位精度高。一次修正航向精度達(dá)到1.21′,一次修正后航位推算誤差明顯減小;二次迭代修正達(dá)到0.78′,精度較高,并且能獲得精確定位信息作為慣導(dǎo)誤差修正源。
3 結(jié)束語
作戰(zhàn)使用的車載定位定向的發(fā)展朝著高精度和自主性(不依賴衛(wèi)星)方向,但是誤差累計需要修正、野外重啟需要快速獲得坐標(biāo)等,這些問題均可由RFID定位方式解決。筆者提出了多種RFID定位使用方式,并將其應(yīng)用到SINS/OD組合導(dǎo)航中,快速高效初始對準(zhǔn),提高陸基導(dǎo)彈發(fā)射機動反應(yīng)能力和生存打擊能力。RFID輔助定位定向方式既可以對車載捷聯(lián)慣導(dǎo)進行航向修正,同時可以提供精確的定位坐標(biāo)。下一步,將對RFID連續(xù)定位輔助SINS/OD行進間初始對準(zhǔn)、RFID輔助車載導(dǎo)航長航時導(dǎo)航修正、RFID輔助鐵路機動發(fā)射快速定位等進一步研究。