基于標準路面的電傳動車輛動態加載圖譜研究與應用
2019-03-27 08:49:14燕玉林劉春光張運銀馬曉軍
火炮發射與控制學報 2019年1期
關鍵詞:模型
燕玉林,劉春光,張運銀,馬曉軍
(陸軍裝甲兵學院 陸戰平臺全電化技術重點實驗室, 北京 100072)
電傳動車輛是西方國家陸軍重要的信息化機動作戰平臺,也將是我國未來主戰裝備的發展模式之一[1]。傳統加載試驗所編制的載荷譜通過雨流矩陣法等效模擬并加以外推形成循環載荷譜塊,考察車輛部件疲勞壽命,實際上仍是通過多次穩態加載達到等均值載荷的過程[2]。文獻[3]通過自行開發的汽車載荷仿真軟件,獲取了車輛在轉向行駛和制動過程中的載荷數據,并以此建立了典型路面的車輛運動參數分布和載荷分布圖譜。文獻[4-5]通過不同方式獲得載荷數據后用統計方法獲得載荷譜。文獻[6]完成了整車動力學仿真,獲得了不同“工況-路面”的載荷譜。以上路面載荷譜統計了路面不平度對車輛零部件的累積損傷,無法實時反映車輛行駛時輪胎負載特性變化。
隨著電傳動車輛技術發展,傳統車輛的路面載荷譜已逐漸不能滿足電傳動車輛的加載試驗需求,一種能夠實時真實還原電傳動車輛行駛過程中驅動電機負載狀況的動態加載圖譜研究成為必然。
針對以上問題,筆者提出一種電傳動車輛動態加載圖譜及編制方法。通過解析輪胎六分力將路面負載參數折算至電機加載端,基于標準路面譜搭建了車路系統模型,模擬車輛在典型工況行駛下的負載,仿真數據整合后繪制了用于不平路面直駛加載的“位移-車速-路面等級-負載”圖譜。通過仿真平臺查詢調用以實現對路面負載的實時重構,并應用于系統臺架試驗。
1 車輪負載分析
1.1 輪胎六分力求解
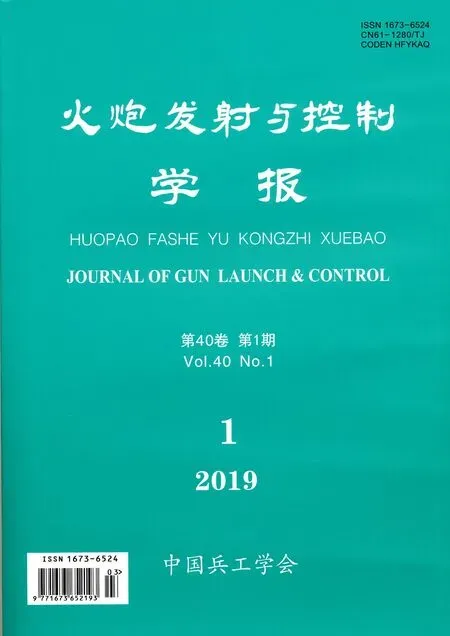
車輛行駛于路面的過程實際上是輪胎與路面間力的相互作用的過程。地面對車輛行駛產生的阻力可以歸結為地面對輪胎向前滾動產生的阻力,這個阻力最終作用于驅動電機的扭矩輸出端。對輪胎建立六自由度坐標系如圖1所示。
基于ADAMS的PAC2002輪胎模型,有三角函數組合來擬合輪胎數據,其一般形式為:
(1)
式中:輸出量為縱向力Fwx、側向力Fwy和回正力矩Mwz,由Y(X)表示;輸入量為X,包括縱向滑移率Kw或側偏角α;系數B表示剛度因子、C表示曲線形狀因子、D表示峰值因子、E表示曲率因子,是由輪胎的垂直載荷以及外傾角決定的;SV、SH分別為曲線在垂直方向和水平方向的漂移量。
1.2 電機輸出端負載分析
根據輪胎六分力可列出車輪動力學方程:

(2)

Tfout=(Tfin-ΔTJf)nηf,
(3)
(4)
ωfin=ωfoutn,
(5)
式中:Tfout、Tfin為減速器輸出和輸入軸上的轉矩;ΔTJf為減速器自身的慣性轉矩;Jf為減速器轉動慣量;ωfin、ωfout為減速器輸入和輸出的角速度;ηf為減速器的傳動效率。
根據單個車輪上電機輸出力矩Tfin=TM,Tfout=Tw,聯立式(2)~(5)可算出電機輸出端負載為:
(6)
式(6)即為從車輪負載折算到電機輸出端的負載轉矩,這為通過仿真實驗獲取加載電機加載值提供了可能。根據式(6),只需通過仿真獲取輪胎的受力和旋轉角加速度,即可逆向解算電機輸出端負載轉矩。
2 基于Sayers模型的虛擬路面重構
2.1 路面不平度理論
在路面模擬中,采用標準功率譜密度對道路建模比采用實測道路數據有更高的可操作性和經濟性。文獻[7]指出,路面的起伏狀態服從均值為0的正態分布,將路面不平度描述為空間功率譜密度與空間頻率的關系被稱為標準路面模型,表達式為
(7)
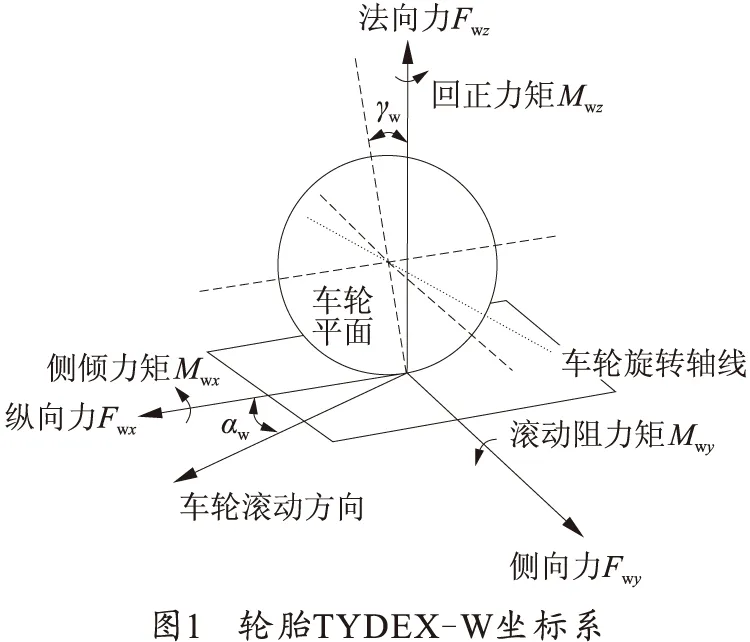
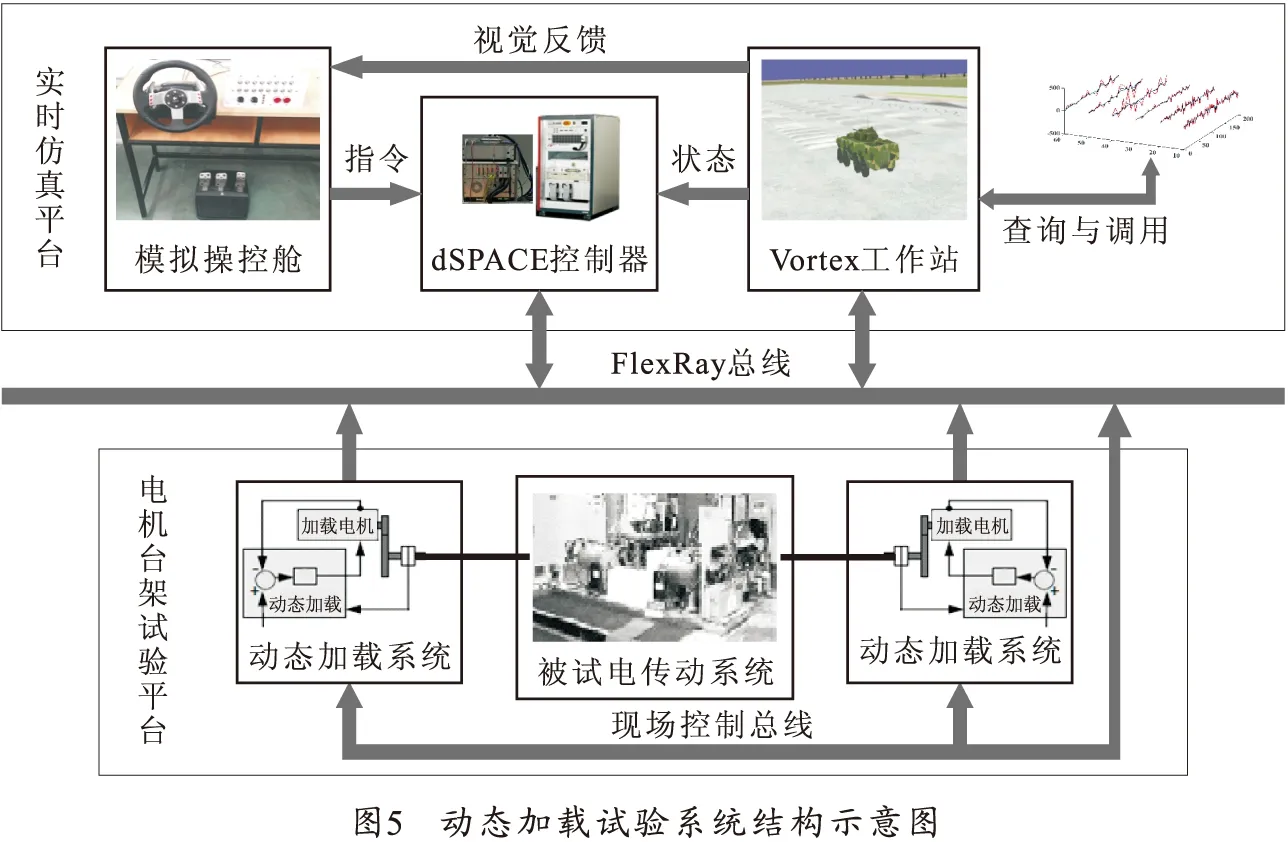
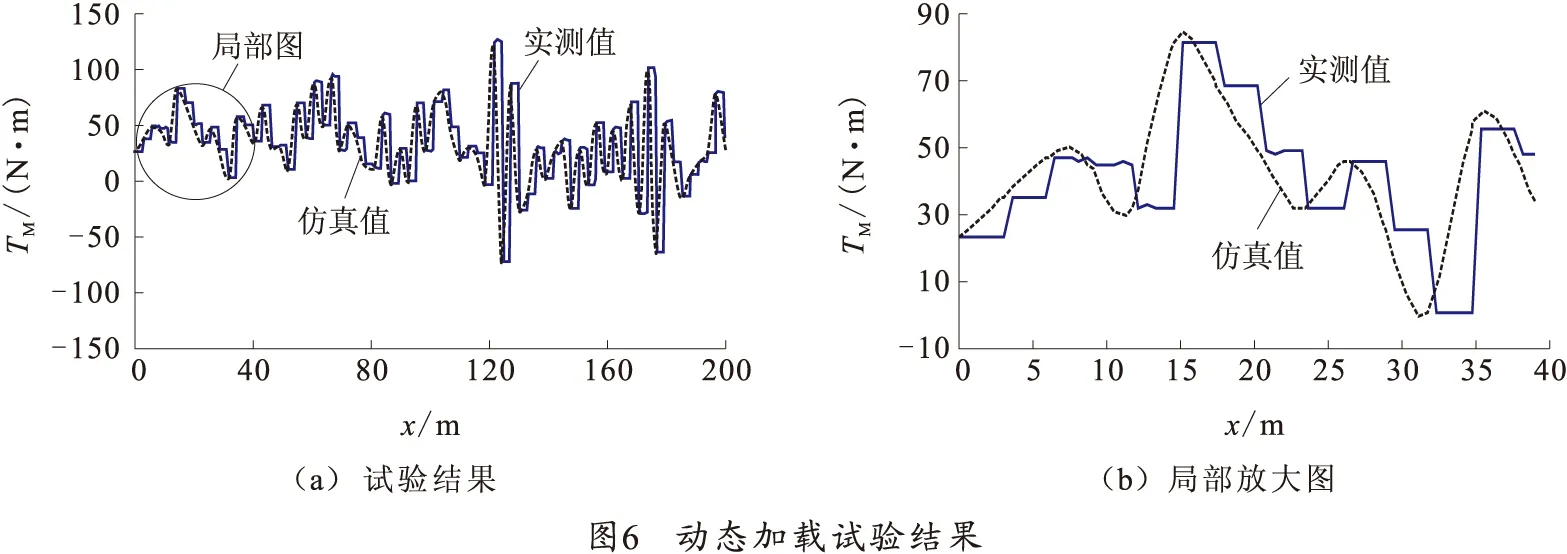
式中:n為空間頻率,m-1,是波長λ的倒數;n0=0.1 m-1,為參考空間頻率;Gq(n0)為在n0下的路面譜系數;ω是擬合功率譜密度指數,ω=2。GB 7031—2005把路面分成8級[8],規定各級路面不平系數Gq(n0)的幾何平均值和0.011 Sayers模型,表示了路面空間功率譜密度與空間頻率的關系,是一種經驗模型。根據其原理表達出路面空間功率譜密度與空間頻率的關系如下: (8) 式中:Ge為空間功率譜密度幅值;Gs為速度功率譜密度幅值;Ga為加速度功率譜密度幅值。3個參數均由獨立的白噪聲獲得,每個白噪聲是均值為0,標準差σ為的高斯白噪聲。標準差與功率譜密度的關系為 (9) 式中:G為Ge、Gs或者Ga;Δ為采樣間隔。 引入均方根σq,頻率范圍選擇標準值0.011 表1 常見Sayers模型參數 Sayers模型是 ADAMS采用的路面模型,需要將標準等級路面向Sayers模型轉化。將Ge和Ga定義為0,假設Sayers模型與標準路面模型中的速度功率譜密度相等,即令Gd(n)=Gq(n),則有: Gs=(2πn)2·Gq(n)=(2πn0)2·Gq(n0). (10) 通過式(10),可將標準路面模型向Sayers模型轉化,具體參數如表1所示。以B級路面為例,令Ge=Ga=0,Gs=25.27,設置路面屬性為不平路面,摩擦系數0.75,采樣間隔0.25 s,基礎長度間隔1 m,生成路面模型供后期仿真使用。 為驗證Sayers道路模型的準確性,選擇隨機路面輸入試驗進行不平度功率譜估計,來檢驗虛擬路面重構的可信度。分別選擇初始車速v=50、30和10 km/h時的B級路面,并以v=50 km/h為例分析,仿真總時長為900 s,仿真步長為0.1 s。獲取路面不平度的PSD并返回與之對應的線性頻率n,與GB 7031規定的標準路面功率譜密度對比[9]。 選取1軸左側車輪軸心處作為參考點,根據仿真結果讀取參考點的垂向位移變化量如圖2(a)所示。截取粗糙段將時域信號轉化為頻域信號,采用平均周期圖法對粗糙路段進行功率譜密度估計,窗函數選擇矩形窗,分段長度為256點,重疊點為128。對比功率譜密度仿真結果如圖2(b)所示。 根據圖2(b)中,虛線為理論值,實線為測量后的擬合值,可知由Sayers模型所擬合的路面不平度功率譜密度與理論功率譜密度吻合程度較高,說明所建路面模型準確性高。少量誤差來源于三方面:高頻偏離是由于傅里葉變換產生的頻率混疊造成;低頻偏離是由于樣本長度不可能無限長造成;另外因為輪胎自身的阻尼特性,導致實際旋轉半徑的微小變化形成誤差。由此驗證了該虛擬路面生成方法可行,可用于進一步仿真研究。 3.1.1 選取仿真變量 以某型輪轂電機驅動車輛為研究對象,基于ADAMS搭建其車體動力學模型 和PAC2002輪胎模型,仿真實驗獲取車輪縱向力、輪胎滾動阻力和旋轉角加速度,進而由式(6)得到驅動電機的負載轉矩。隨機不平路面下的車輪動態響應與地面的起伏狀態有關。選取車輛的縱向位移作為自變量,將時間-響應歷程轉化為位移-響應歷程。搭建單道不平路面,直線行駛時不區分左右輪,選取1軸左側輪胎輪的車輪縱向力、滾動阻力矩和旋轉角加速度為具體測量變量。 3.1.2 仿真路面及車速的選取 仿真路面按照國家標準規定的分級方式,選擇A、B、C三級路面,統一路面附著系數為0.75,具體等級路面標識參數如表2所示。 表2 仿真路面參數 選擇6種不同車速作為車輛直駛工況初始速度,具體數值如表3所示。 表3 初始車速 km·h-1 3.1.3 仿真過程設置與結果選取 仿真實現過程以某一等級路面和初始車速作為工況輸入條件,行駛過程中不添加制動力矩,即Tbrk=0,不添加轉向力矩。仿真步長為0.5 s,采集縱向位移x為0~200 m距離內各項仿真結果,記錄各測量變量的位移-響應歷程。選取其中的典型工況對比分析不同輸入下的車輪動態響應。設定等級路面為B級路面,車輛行駛速度選擇10,30,50 km/h,取1軸左側輪胎作為測量對象,對粗糙路段0~200 m位移上相關數據進行采樣,結果正負代表方向,比較不同工況下的驅動電機負載轉矩,如圖3所示。車輪的滾動阻力矩始終大于0,而縱向力隨路面起伏有反向情況。 車輛處于不平度路面直駛工況時,電機負載的動態響應與實時接觸的路面狀況相關,由此需引入實時的自變量。在路面條件已確定的情況下,根據車輛前進方向上距離原點的位移,即可確定當前的路面狀況,實時反映電機負載轉矩。選取車速v、路面等級RL作為邊界條件,縱向上車輛質心位移x為參考變量,電機負載轉矩TM作為因變量,統計存儲3類路面、6類車速條件下共18種工況的位移-載荷歷程,并按車輪分別繪制負載特性曲線并對比分析電機負載變化,以1軸和4軸左右兩側電機負載轉矩為例,加載圖譜如圖4所示。 以Vortex車輛動力學實時仿真建模工作站為核心,基于臺架試驗反饋數據對任務剖面下的車輛姿態進行實時重構,形成駕駛員視覺閉環,并根據試驗場景實時查詢調用載荷圖譜,進行車輛負載規劃以及驅動裝置的加載控制,實現實時仿真與臺架試驗的同步推進,構成電傳動動態加載試驗系統,試驗系統總體結構如圖5所示。 車輛行駛控制算法在車輛控制器原型dSPACE中運行,車輛動力學模型在車輛動力學實時仿真平臺Vortex中運行,試驗系統各節點均由車載控制總線FlexRay連接。駕駛員通過模擬操控艙下達操控指令,dSPACE接收操控指令和Vortex返回的車輛狀態參數后解算驅動控制指令,并經FlexRay總線向電機臺架試驗系統的被試電機下達控制給定,控制被試電機模擬實車驅動電機進行牽引或制動運行。Vortex工作站進行虛擬車輛和試驗場景的三維渲染,并通過分布式測量系統采集相關參數,如電機轉速、加速度等,進行車輛動力學計算,確定車輛三維坐標及姿態等,根據試驗進程剖面實時查詢加載圖譜,將負載轉矩目標值通過總線實時下達到被試電機的控制器,模擬不同路面的行駛負載,完成被試電機的動態加載。臺架系統中的被試電機和加載電機經傳動軸直連形成對拖,沒有減速裝置。傳感器將當前對拖電機轉速經總線反饋給Vortex,形成控制閉環。 不平路面直駛加載試驗屬于全動態加載,輪轂電機負載轉矩與車輛實時位置相關。該實驗基本流程為:在實時仿真平臺選擇相應等級路面,操縱車輛以目標車速行駛,經Vortex工作站實時解析車輛位置,根據位移查詢動態加載試驗圖譜并發送控制指令至上位機,控制陪試電機加載,完成驅動電機負載重構,檢驗驅動電機負載重構的精度和動態跟蹤性。以B級路面等級、車速20 km/h的不平路加載試驗為例,試驗結果如圖6所示。 圖6(a)是不平路面動態加載試驗在行駛車速為20 km/h,路面等級為B級條件下的電機負載轉矩曲線圖。圖6(b)是截取車輛位移0~40 m的局部放大圖。通過對比相同工況仿真值與電機實測數據可知: 1)電機的負載轉矩變化呈現動態變化,隨實時仿真平臺中的車輛位置而實時改變,反映了路面起伏條件下的電機負載特性。 2)在車輛行進過程中,車輪負載改變時,加載電機很好地響應了負載變化,整個過程電機負載的變化趨勢與理論值一致,實現了重構負載對車輛實時位置的動態跟蹤。 3)電機系統在試驗中每間隔一段距離有2.53 m左右的穩態過程。這是跟仿真過程中的取樣間隔有關,臺架系統對負載指令響應速度快,并能迅速保持穩定,在下一次圖譜查詢過程前,保持上一次的負載轉矩值。 筆者提出了一種針對電傳動車輛動態加載的載荷譜編制方法,實現了標準路面模型向 Sayers 模型轉化,通過離線仿真實驗獲得車輛在不平路面行駛的載荷數據,并折算為驅動電機輸出端的負載轉矩,數據整合后繪制為“位移-車速-路面等級-負載”加載圖譜。通過電機臺架系統對加載圖譜的實時調用,完成車輛行駛負載重構,實現對驅動電機的動態加載。試驗結果表明,該加載圖譜反映了各軸驅動電機負載轉矩的特性,能夠真實反映不平路面的負載變化規律,避免了對載荷數據進行相關縮減或外推工作及由此帶來的載荷數據誤差,提高效率并保證了數據的真實性。加載試驗平臺具有良好的加載精度和實時性,實測負載轉矩具有很好的動態跟蹤性,加載精度較高,對開展電傳動車輛驅動系統室內臺架試驗研究具有重要意義。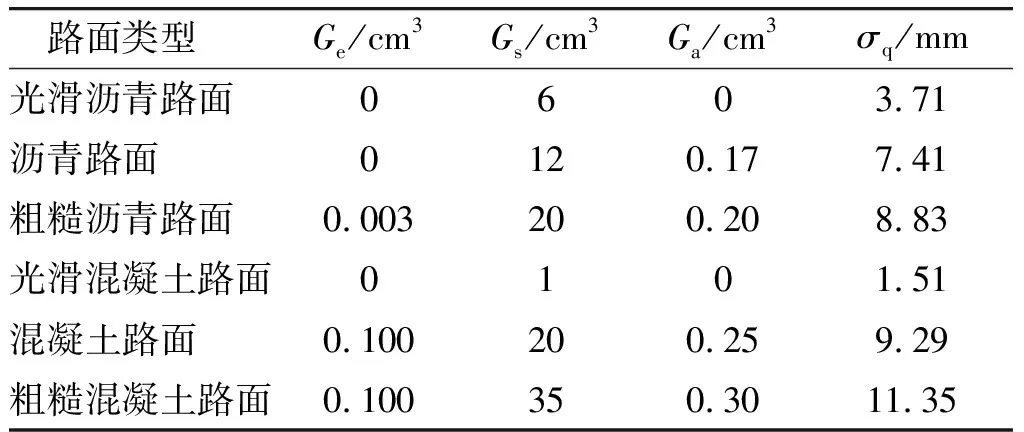
2.2 等級路面生成
2.3 隨機路面輸入驗證
3 加載圖譜編制
3.1 載荷數據獲取



3.2 圖譜編制方法

4 加載試驗
5 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38網絡安全與數據管理(2022年1期)2022-08-29 03:15:20導航定位學報(2022年4期)2022-08-15 08:27:00中學生數理化·中考版(2022年8期)2022-06-14 06:55:24新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36成都醫學院學報(2021年2期)2021-07-19 08:35:14新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24光學精密工程(2016年6期)2016-11-07 09:07:19