基于反輻射導引頭空間分辨點的彈著點推算方法研究
2019-03-19 07:28:24劉國彬王永海賀方君
艦船電子對抗 2019年1期
關(guān)鍵詞:方法
劉國彬,劉 朋,王永海,賀方君
(中國洛陽電子裝備試驗中心,河南 孟州 454750)
0 引 言
反輻射導彈是電子戰(zhàn)中的一種重要硬殺傷武器,其利用反輻射導引頭對接收到的雷達信號進行識別、分選,實時檢測導彈與目標雷達的角度誤差信號或視線角速度誤差信號,形成控制指令,引導導彈飛向目標并最終摧毀目標,在現(xiàn)代戰(zhàn)爭中發(fā)揮著至關(guān)重要的作用。為應(yīng)對反輻射導彈的威脅,可在雷達附近部署有源誘餌,誘餌根據(jù)雷達信號樣式輻射信號,信號脈寬覆蓋雷達信號脈寬,信號功率高于雷達頂空副瓣平均功率,從而對反輻射導引頭測向形成干擾,使反輻射導彈最終彈著點偏離雷達,達到保護雷達的目的。
反輻射導引頭是反輻射導彈的核心部件,為檢驗其抗誘餌性能可采用外場試驗方法,一般包括地面靜態(tài)試驗、掛飛試驗和實彈打靶試驗等。其中,地面靜態(tài)試驗采用高塔作為反輻射導引頭升空平臺,雷達及誘餌按照實際使用方式進行布站,構(gòu)建反輻射對抗態(tài)勢,檢驗反輻射武器的跟蹤目標能力、抗雷達關(guān)機能力、抗誘偏能力等指標[1]。靜態(tài)試驗方法優(yōu)點是消耗小、操作方便、可重復性強,缺點是不能夠檢驗反輻射導引頭動態(tài)性能。實彈打靶試驗中,雷達及誘偏系統(tǒng)按照實際使用要求布站,反輻射導彈掛載于飛機按照實戰(zhàn)使用要求進行打靶試驗。該試驗方式能夠有效驗證反輻射導引頭在有源誘餌干擾中的跟蹤性能,打靶試驗的缺點是代價高、風險大、準備周期長,實施難度相對較大。
掛飛試驗中利用飛機或飛艇等飛行平臺,構(gòu)建貼近實際的試驗環(huán)境,檢驗反輻射導引頭的目標識別能力、測角精度、視線角速度精度及靈敏度等指標[2]。為了定量考核反輻射導彈的抗誘偏性能,需要得出反輻射導彈在模擬攻擊過程中的彈著點。文獻[3]、[4]中提出利用無人駕駛飛艇搭載反輻射導引頭、GPS定位系統(tǒng),構(gòu)成閉環(huán)控制回路,模擬反輻射導彈末端攻擊過程,推算模擬反輻射導彈彈著點的試驗方法,該試驗方法具有經(jīng)濟、安全、逼真度較高的特點。本文探索了閉環(huán)掛飛試驗中的處理方法,給出了四點源情況下尋找反輻射導引頭空間分辨點的方法,并根據(jù)空間分辨點推算其彈著點的數(shù)據(jù)處理方法。
1 閉環(huán)掛飛試驗模型建立及數(shù)據(jù)處理方法
1.1 誘餌干擾下的反輻射導彈末端攻擊過程
反輻射導彈發(fā)射后,反輻射導引頭搜索雷達目標。當搜索到目標雷達并轉(zhuǎn)入穩(wěn)定跟蹤狀態(tài)后,反輻射導彈轉(zhuǎn)入導引飛行階段,根據(jù)反輻射導引頭的導引信息,自動飛向目標。若反輻射導引頭在跟蹤過程中丟失目標,反輻射導彈根據(jù)丟失時刻記憶的目標信息繼續(xù)按此目標進行攻擊,直至再次跟蹤目標,重新按反輻射導引頭導引信息進行跟蹤。如果在攻擊過程中沒有有源誘餌的干擾,反輻射導彈末端的彈道軌跡基本是直線[5]。
反輻射導彈在攻擊過程中,如果被攻擊雷達部署有有源誘餌,由于有源誘餌的干擾,反輻射導引頭的跟蹤點偏離雷達目標,且跟蹤點不斷變化,反輻射導彈的運動方向與反輻射導引頭的跟蹤方向不一致,反輻射導彈將向跟蹤方向做機動飛行[5]。反輻射導彈在由遠及近的飛行過程中,隨著反輻射導引頭對包括有源誘餌在內(nèi)的多點源的張角逐漸增大,反輻射導引頭跟蹤視場內(nèi)經(jīng)歷由多點源到兩點源直到單點源的過程,反輻射導彈經(jīng)歷3個階段:受控狀態(tài)、隨遇平衡狀態(tài)、失控狀態(tài)[6]。其中,受控狀態(tài)是指由于導引頭分不開雷達或者目標,此時導引頭受控于被保護雷達與誘餌輻射信號的等相位面[7];隨遇平衡狀態(tài)指誘餌與雷達相對于導引頭的張角大約為導引頭的空間分辨角,導引頭開始分辨目標并跟蹤多點源中的一個目標;失控狀態(tài)指反輻射武器拋開了多點源的誘偏,根據(jù)在隨遇平衡狀態(tài)選定的目標進行跟蹤或?qū)嵤┕簟7摧椛鋵б^開始跟蹤多點源中一個目標的空間位置即為空間分辨點。
1.2 閉環(huán)掛飛試驗模型
利用閉環(huán)掛飛試驗模擬反輻射導彈末端攻擊過程,飛行平臺根據(jù)反輻射導引頭上報的跟蹤數(shù)據(jù)向目標方向做機動飛行。飛行航線設(shè)計必須覆蓋模擬反輻射導彈的受控、隨遇平衡階段,模擬反輻射導彈由受控至隨遇平衡狀態(tài)的飛行過程。飛行平臺飛行至反輻射導引頭空間分辨點后,由于受飛行條件以及安全因素的限制,采用動態(tài)飛行的方法已不能模擬反輻射導彈在失控狀態(tài)的攻擊過程。
通過閉環(huán)掛飛找出反輻射導引頭在典型作戰(zhàn)態(tài)勢下的空間分辨點位置,依據(jù)模擬反輻射導彈失控狀態(tài)時的控制特點、技術(shù)參數(shù)推算模擬反輻射導彈的飛行軌跡,進而得出彈著點。
1.3 閉環(huán)掛飛試驗中飛行軌跡及彈著點推算方法
如圖1所示,其中A表示反輻射導引頭由兩點源至單點源的空間分辨點位置,O1、O2為兩點源位置,O0為瞄準點。若反輻射導引頭在空間分辨點A選擇O1為攻擊目標,則反輻射導彈將按照其末端速度、最大過載向攻擊目標做機動飛行,圖中虛線即為其飛行軌跡,與地面的交點即為彈著點B;若反輻射導引頭在空間分辨點選擇O2為攻擊目標,彈著點為B′。
圖1 反輻射導彈落點示意圖
可采用時間差分法外推反輻射導彈的軌跡,反輻射導彈t0時刻位于臨界位置(X(t0),Y(t0),Z(t0)),運動速度為Vt0(Vx(t0),Vy(t0),Vz(t0)),反輻射導引頭此時的跟蹤點為O1,由于反輻射導引頭存在測角誤差,跟蹤點可能與目標實際位置不重合。反輻射導彈按照末端速度和最大過載向跟蹤點做機動飛行,其曲線運動半徑為:
(1)
式中:Vm為末端速度;am為最大過載對應(yīng)的加速度。
求出做機動飛行的圓心坐標(X0,Y0,Z0),及由運動方向和反輻射導彈指向跟蹤點的跟蹤方向矢量所在平面的法線矢量(ax,ay,az),t1時刻導彈的位置為:
(2)
式中:Δt為時間間隔。
t1時刻,反輻射導彈指向機動圓心的矢量為:
(3)
求出速度方向矢量:
(4)
速度方向矢量歸一化后為(Dx(t1),Dy(t1),Dz(t1)),則t1時刻反輻射導彈速度矢量為:
(5)
判斷速度矢量是否與跟蹤方向重合,若重合,反輻射導彈停止做機動飛行,沿直線運動直至落地;否則,繼續(xù)按上述方法依次迭代,求出各時刻的位置和速度,直至導彈落地,運算結(jié)束。
2 驗證與結(jié)果分析
下面對上述數(shù)據(jù)處理方法進行驗證、分析,雷達部署于位置(500,0,0),3個誘餌按照前三角方式布站,如圖2所示,3個誘餌按照指定的保護措施從時
序、頻率、能量、空間上實現(xiàn)對雷達的保護[8]。飛行平臺掛載反輻射導引頭后從前方進入,根據(jù)反輻射導引頭上報的引導信息向目標機動飛行,模擬反輻射導彈的末端攻擊過程,GPS定位裝置、慣導系統(tǒng)全程實時記錄其位置信息、姿態(tài)信息。根據(jù)記錄的位置信息描繪的飛行軌跡如圖2所示。
圖2 飛行平臺飛行航跡示意圖
2.1 尋找空間分辨點
尋找出反輻射導引頭的空間分辨點是推算彈著點的關(guān)鍵。閉環(huán)飛行過程中,反輻射導引頭輸出角度信息,并結(jié)合反輻射導引頭的位置信息可以求出反輻射導引頭跟蹤位置,如圖3所示。圖3(a)縱軸表示飛行過程中反輻射導引頭跟蹤點在X方向位置,圖3(b)縱軸表示飛行過程中反輻射導引頭跟蹤點在Y方向位置,橫軸表示時間。跟蹤點在三誘餌之間擺動,當反輻射導引頭運動至圖中圓圈對應(yīng)的時刻時,反輻射導引頭開始穩(wěn)定跟蹤誘餌2,因此對應(yīng)圓圈時刻的反輻射導引頭空間位置即為其空間分辨點。
圖3 試驗中反輻射導引頭空間分辨點位置示意圖
2.2 推算彈著點
根據(jù)試驗中飛行平臺運動軌跡,可求出分辨點位置處的飛行平臺運動方向。外推過程中導彈的末端最大速度設(shè)為500 m/s,最大過載設(shè)為10 g,外推運動航跡與地面的交點即為模擬反輻射導彈的彈著點,如圖4所示。其中瞄準點表示分辨點位置處的飛艇運動方向與地面的交點,跟蹤位置表示分辨點位置處反輻射導引頭實際跟蹤目標位置,反輻射導彈由瞄準點向跟蹤位置機動飛行,外推軌跡如圖2所示,模擬反輻射導彈彈著點偏離雷達及3個誘餌,顯示了誘偏系統(tǒng)對雷達及自身的保護作用。
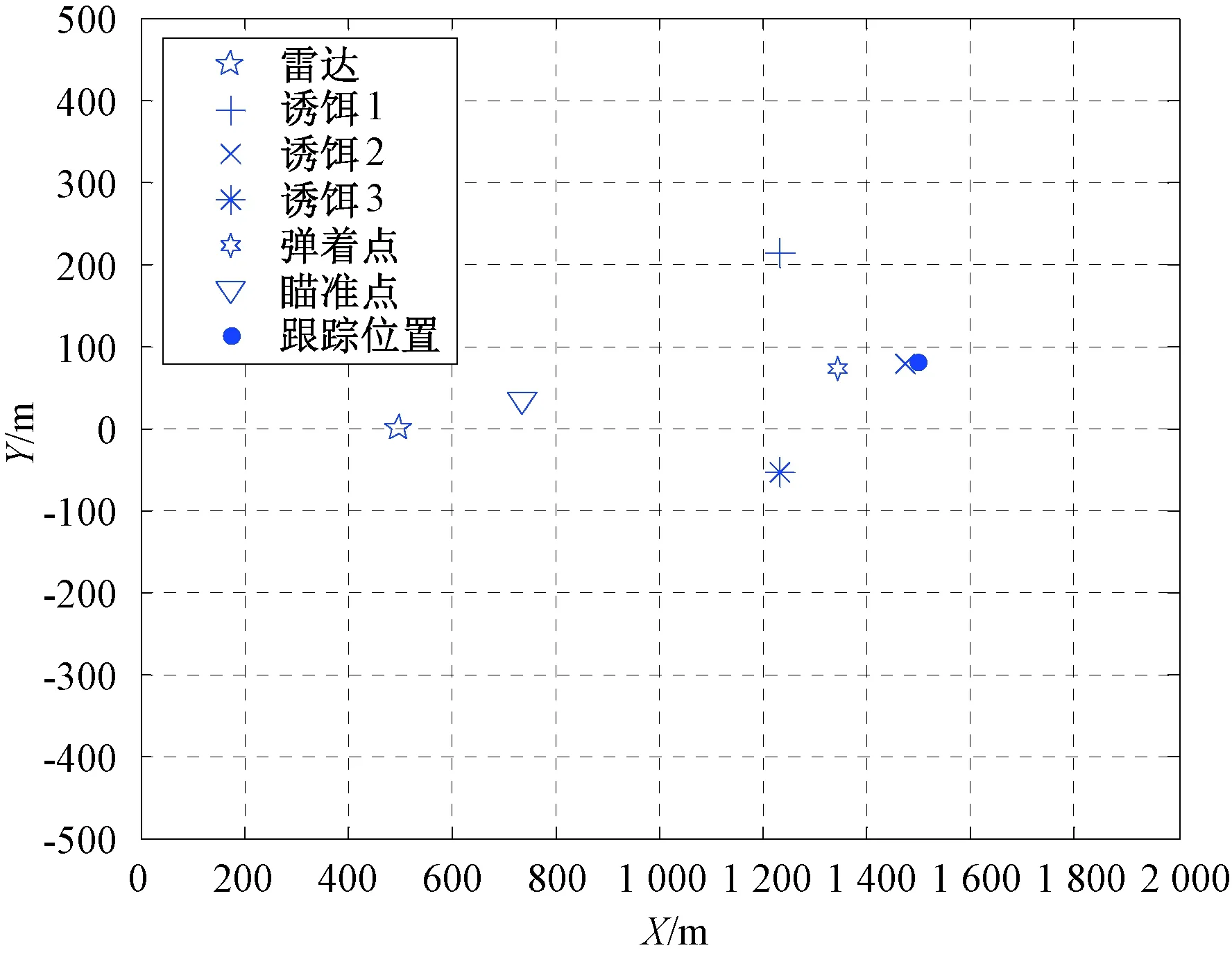
圖4 模擬反輻射導彈彈著點示意圖
3 結(jié)束語
本文研究了采用閉環(huán)掛飛試驗模擬反輻射導彈末端攻擊過程,推算反輻射導彈彈著點,進而檢驗誘偏系統(tǒng)誘偏效果的試驗方法,對試驗過程中的數(shù)據(jù)處理方法進行了研究分析,提出了可操作性強的數(shù)據(jù)處理方法,并進行了數(shù)據(jù)處理方法檢驗,該方法對開展此類試驗具有一定的指導意義。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56