淺域水下滑翔機設計及性能分析
2019-03-15 01:32:08陳孟偉劉雁集
水下無人系統學報 2019年1期
關鍵詞:系統
陳孟偉, 劉雁集
?
淺域水下滑翔機設計及性能分析
陳孟偉1, 劉雁集2
(1. 上海產業技術研究院, 上海, 201206; 2. 上海海事大學 商船學院, 上海, 201306)
水下滑翔機作為一種具有長續航能力的水下航行器, 可通過搭載特定傳感器實現對一定水域環境的監測。為解決滑翔機對淺水域環境的監控問題, 文中提出一種運行于淺水域的水下滑翔機設計方案, 分析了俯仰和浮力機構調節與俯仰角度的耦合方式對其整體性能的影響, 設計了基于絲桿副傳動裝置的可快速調節的單沖程浮力調節系統, 并采用鰭舵調節裝置實現機體的轉彎調節。同時綜合考慮機體內部各移動部件狀態變量, 建立淺域滑翔機動力學模型, 設計了線性二次調節器(LQR), 確定控制器各權重參數, 實現了浮態切換的快速調節控制, 并通過水池試驗測試其運動能力。試驗結果表明, 研制的水下滑翔機可在3 m水深內順利運行, 轉彎半徑小, 可達9 m, 完全滿足在淺水域穩定運行與順利巡航的要求。
水下滑翔機; 淺水域; 動力學模型; 水池試驗
0 引言
水下滑翔機是由浮力驅動、帶有固定機翼的水下航行器, 具有工作時間長、運行范圍廣等優點, 目前已廣泛應用于海洋物理信息監測等領域。運行于海洋環境的水下滑翔機技術經過多年的發展, 國內外已研制出Slocum[1]、Spray[2]、Seaglider[3]、Seawing[4]、Petrel[5]等多種比較成熟的機型。建立起的深海滑翔機動力學模型, 已能較準確反映機體的運動特性[6-8]。但針對淺水域滑翔機的研究較少, 雖然已研制出眾多小尺度滑翔機, 但多用于實驗室環境做運動控制研究[9-10]。
水下滑翔機由浮力驅動, 因此浮力調節能力是滑翔機運動性能的主要影響因素之一。深海滑翔機為保證浮力系統在高壓下穩定運行, 浮力調節速度緩慢, 浮力系統開始調節后, 滑翔機仍要持續運動一定距離[3]。淺水域深度有限, 要求浮力調節機構有快速變換浮力的能力。同時, 淺水域環境極為復雜, 要求滑翔機具有一定的機動靈活性, 可頻繁調節完成避障。
針對此, 文中通過對深海滑翔機動力學模型的適當簡化, 建立了淺域滑翔機的動力學模型, 并在此基礎上, 設計了一種淺水域滑翔機FIBOT200, 該滑翔機依靠線性二次調節器(linear quadratic regulator, LQR)調節滑翔機的潛浮轉換過程, 并設計單沖程泵形式的浮力調節機構, 以適應淺水域滑翔機快速改變浮力的需求。
1 機構設計
該滑翔機主體長1.6 m, 重28 kg, 運行環境為淺水域。其運動調節機構主要包括置于機首的浮力調節機構、由電池包構成的俯仰調節機構與轉向舵, 如圖1所示。
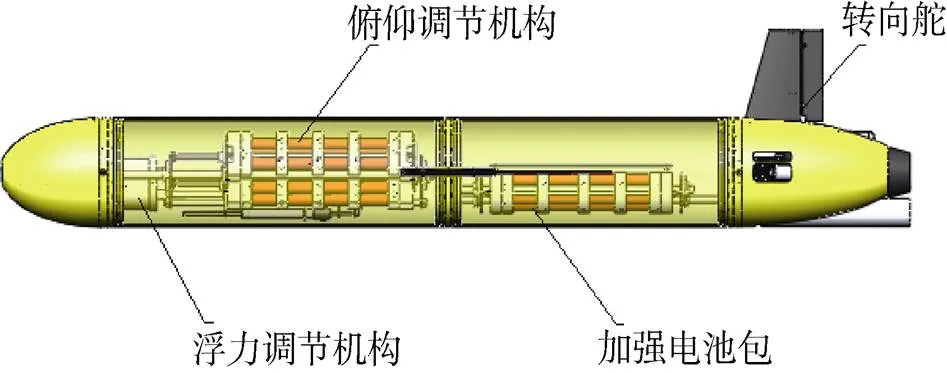
圖1 淺域水下滑翔機結構
對于淺域滑翔機, 主要考量的是姿態與潛浮狀態的轉換能力, FIBOT200滑翔機在縱剖面內依靠浮力機構與俯仰調節機構調節姿態, 采用靈活的舵機調節轉向。
1.1 浮力調節機構
根據優化計算, 浮力系統調節量一般是機體總排水體積的0.5%[11]。FIBOT200滑翔機考慮機動性與抗干擾能力, 設計浮力調節量為總排水體積的0.9%, 為250 mL。浮力調節機構由伺服電機驅動, 通過絲杠副系統將電機輸出的力矩轉換成作用到活塞上的軸向力, 浮力系統吸水部分內徑8 cm, 設計行程9 cm, 機構的工作原理如圖2所示。
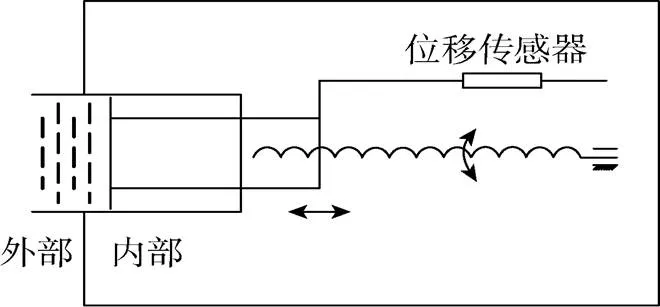
圖2 浮力調節機構原理圖
浮力調節機構的動作會對滑翔機重心產生影響, 該影響主要來自吸排水的質量和傳動機構質量。選取滑翔機浮心為參考原點, 且初始時, 重心在浮心正下方, 則滑翔機重心偏移量滿足
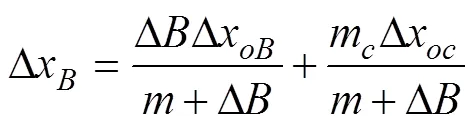
設定浮力機構的運動行程為吸水與排水的2個極限位置, 設置滑翔機機頭方向為正, 此時各參數見表1。
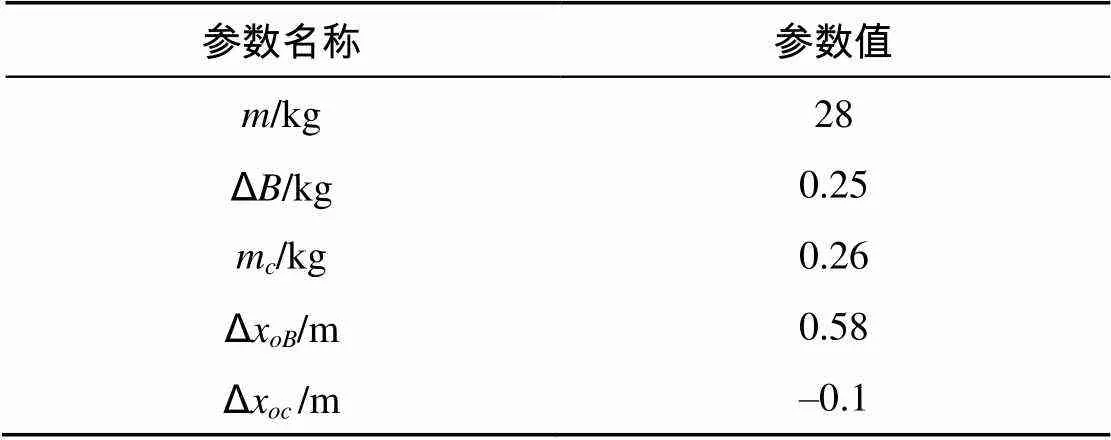
表1 淺域水下滑翔機參數表

由圖3可知, 滑翔機下潛時, 需要增加機體質量, 浮力調節機構吸水125 mL, 產生的俯角為25°。滑翔機上浮時, 需要減小機體質量, 浮力調節機構向外排水125 mL, 產生的俯角為–25°。由此可見, 浮力調節機構的動作會輔助機體完成俯仰調節, 與姿態的調節是正耦合關系。而傳統的深海滑翔機考慮布局便利因素, 將浮力調節系統置于機體尾部, 浮力系統的動作與俯仰角度之間是負耦合關系[12]。
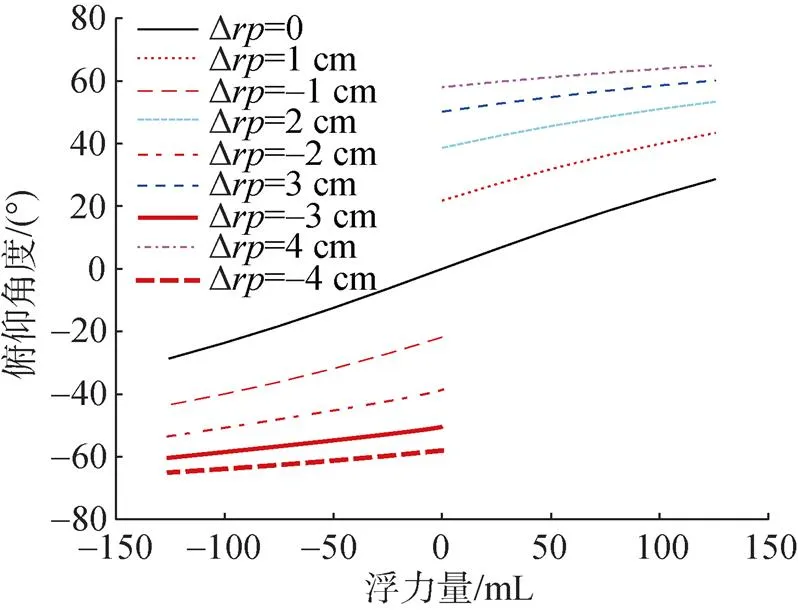
圖3 執行機構狀態對俯仰角度的影響
選擇驅動電機為maxon EC-max 22, 最大轉速8 000 r/min。搭配傳動比14:1的齒輪箱maxon GP22C。
推動活塞的最大運行速度
根據設計參數, 活塞最大運行速度19 mm/s, 完成9 cm滿行程運行, 5 s內可調整完畢。完成浮態轉換所需調節量約為150 mL, 完成浮態轉換則活塞需走行約3 cm, 需要時間約為1.6 s。
1.2 俯仰調節機構
由以上分析可知, 滑翔機的浮力系統動作即可實現機體的浮力調節, 也可實現姿態角度調節。但滑翔機具有最佳滑翔角度, 在最佳滑翔角度下, 滑翔機實現航速最快或滑翔距離最長[11]。為滿足滑翔機以特定滑翔角度運動的要求, 需要俯仰調節機構微調俯仰角度。文中設計了可快速調節的俯仰調節機構(見圖4), 該機構由絲杠傳動裝置與電池包構成。電池包掛載在傳動機構上, 通過位移傳感器反饋位置。
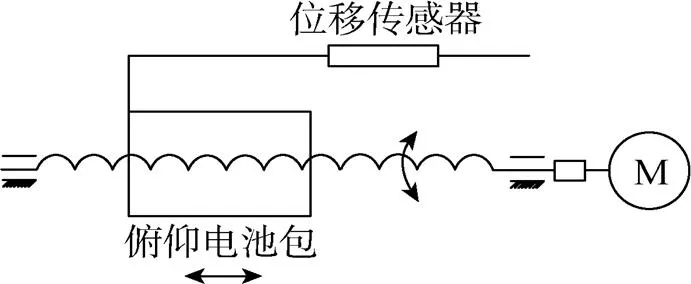
圖4 俯仰調節機構原理圖
俯仰滑塊運動時形成的機體重心偏移
2 動力學模型


上述式中各變量的意義如表2所示。
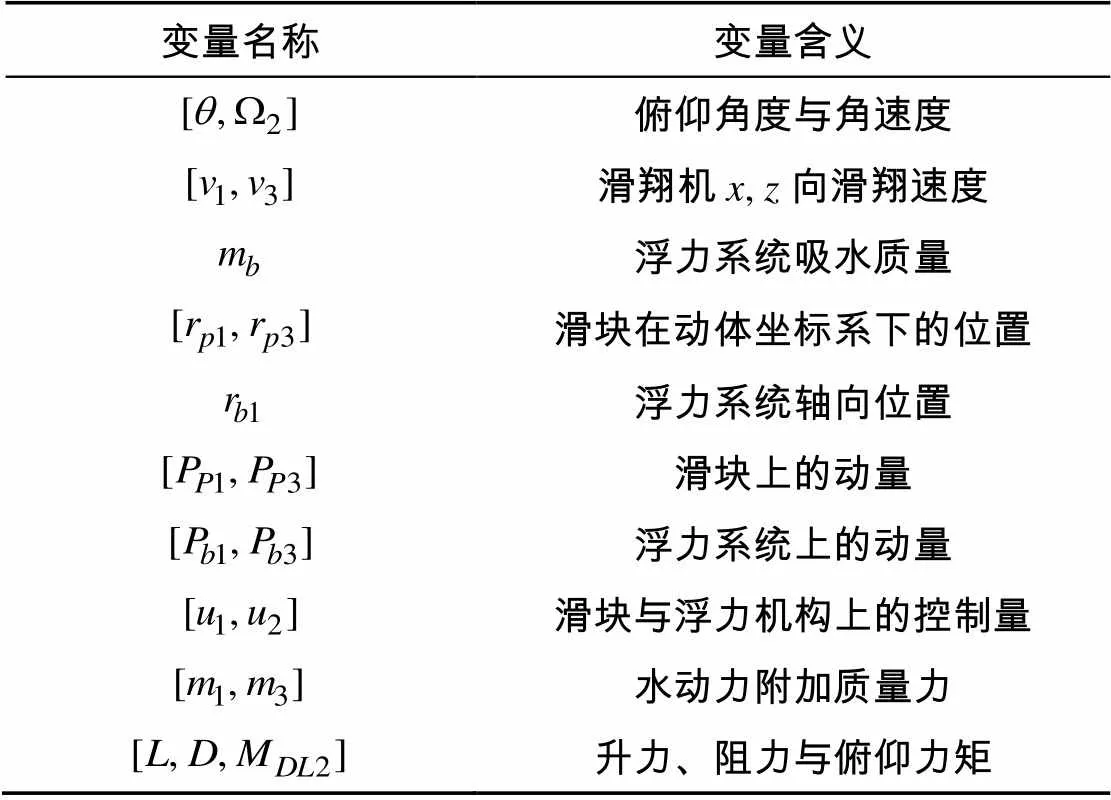
表2 動力學模型中的符號意義
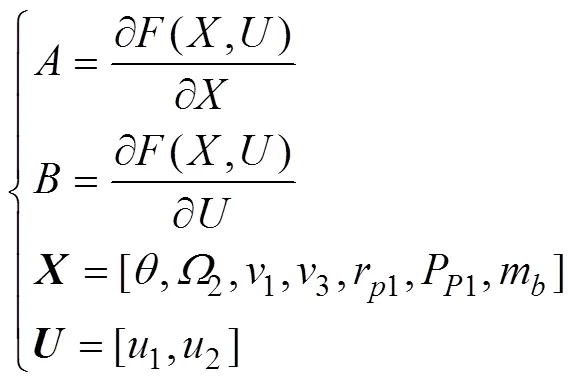
線性化動力學模型

其中
3 巡航性能分析
巡航于淺水域的水下滑翔機應具有可快速調節、快速響應的性能。文中設計LQR控制器來調節滑翔機俯仰角度[13], 控制滑翔機各狀態的變化, 探討滑翔機的運動性能與控制能力。LQR是一種典型的利用系統全狀態的控制方法, 可有效說明系統變量的最優變化過程。

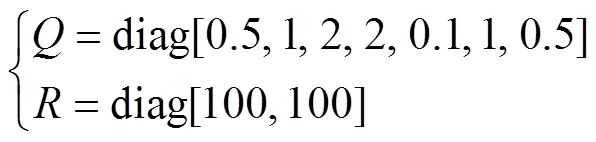
控制律
仿真滑翔機由–30°~30°的運行過程, 設置速度為0.3 m/s, 俯角運行100 s后, 開啟控制器。滑翔機俯仰角度變化如圖5所示, 浮力系統質量變化如圖6所示, 滑翔軌跡如圖7所示。
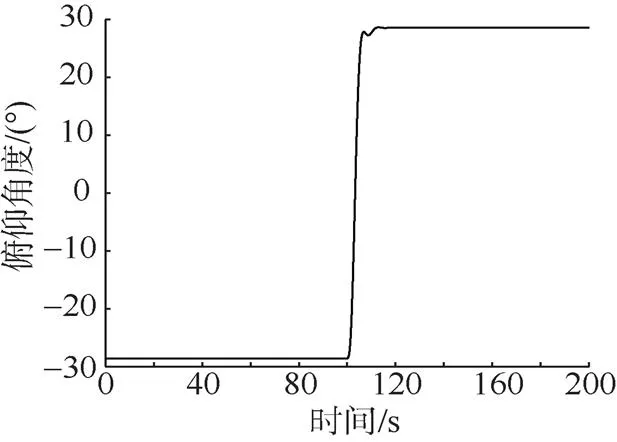
圖5 俯仰角度隨時間變化曲線
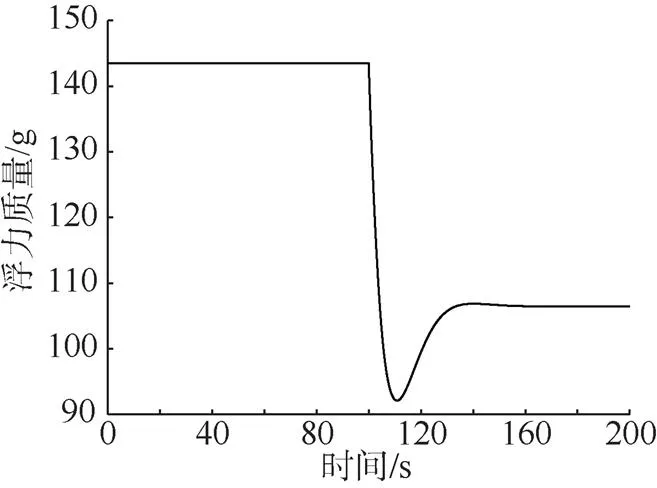
圖6 浮力系統質量隨時間變化曲線
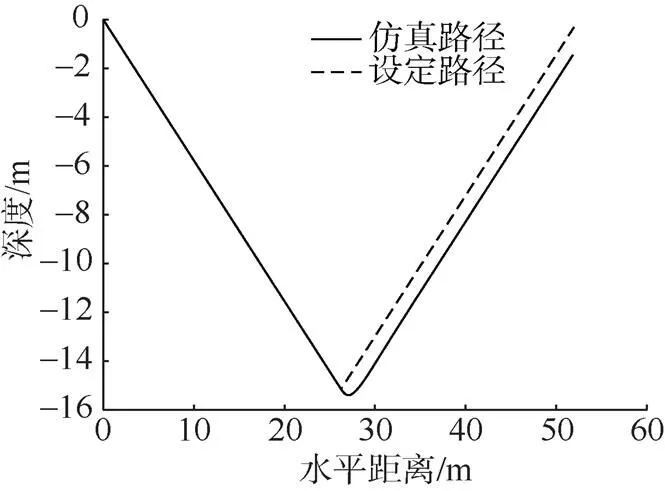
圖7 淺域水下滑翔機巡航路徑對比
由圖5可知, 機體可平滑穩定地完成俯仰角度的切換。圖6中, 浮力系統質量圍繞125 mL變化, 總變化量約38 mL, 由此可知, 由平衡狀態起始, 浮力機構變化19 mL即可達到速度要求。由圖7可知, 經過控制器的調節, 仿真軌跡可以很好地跟隨設定值。但在開啟控制器后, 滑翔機仍向下運動了約0.4 m, 該深度是由滑翔機的調節機構延時與機體慣性造成的, 與深海滑翔機相比, 該深度值較小, 滿足快速調節的性能要求。
4 水池試驗
上述分析說明了滑翔機具有快速調節能力, 文中通過試驗測試其運動能力, 在尺寸23 m×23 m,深5 m的水池中測試滑翔機運動性能, 利用1個置于機頭的壓力變送器反饋深度, 拉線位移傳感器反饋俯仰滑塊與浮力系統狀態, 三維電子羅盤反饋滑翔機姿態, 信號反饋周期為1 s, 頻率為890 MHz的無線通信模塊傳輸控制與反饋信號。設定滑翔機下俯滑翔到達3 m深度時轉換姿態, 開始上浮滑翔, 姿態轉換時控制俯仰調節機構與浮力調節機構以勻速狀態動作, 機體達到設計狀態時執行機構停止動作。以約0.2 m, 60o的滑翔角度滑翔。拍攝的水下滑翔機鋸齒形運動軌跡如圖8所示。水下滑翔機仿真路徑與實測路徑存在一定差異, 因為仿真路徑基于LQR控制器得到, 控制器利用了系統的全狀態, 從而使各個狀態變量都平滑過渡, 但同時也犧牲了執行機構的突出作用, 軌跡差異對比如圖9所示。因滑翔機沒有側向重心調節裝置, 配置的滑翔機重心偏右, 機體微微向右偏轉, 滑翔過程中會造成滑翔機微微向右偏航。從試驗結果可以看出, 在姿態轉換時有明顯的過沖現象, 這是因轉換過程執行機構調節過快造成的。
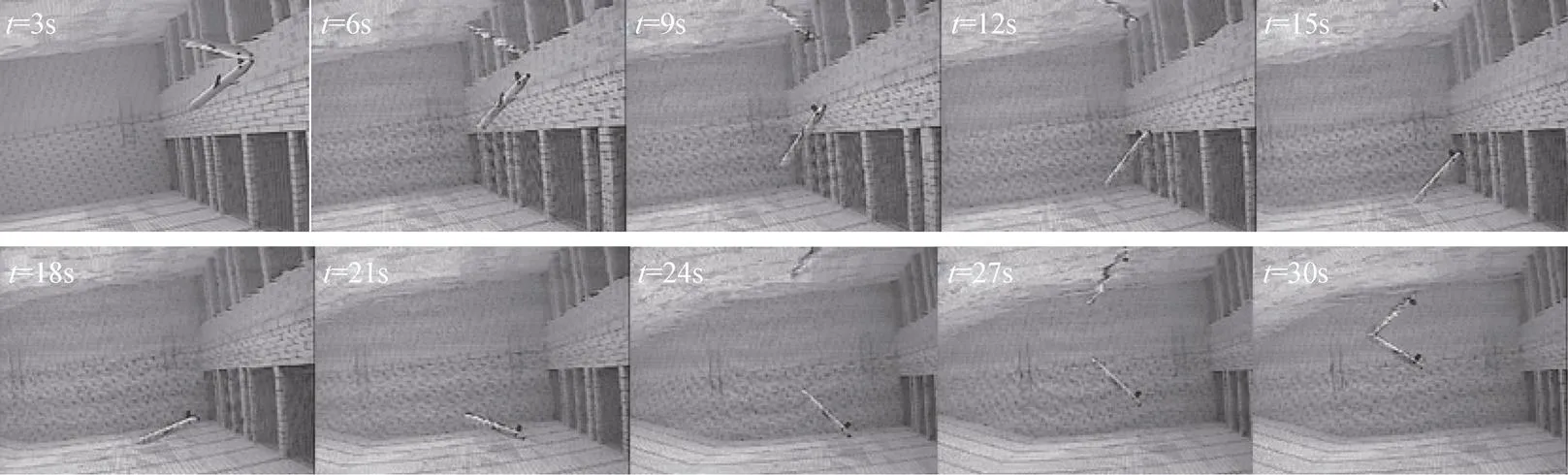
圖8 淺域水下滑翔機鋸齒形運動路徑
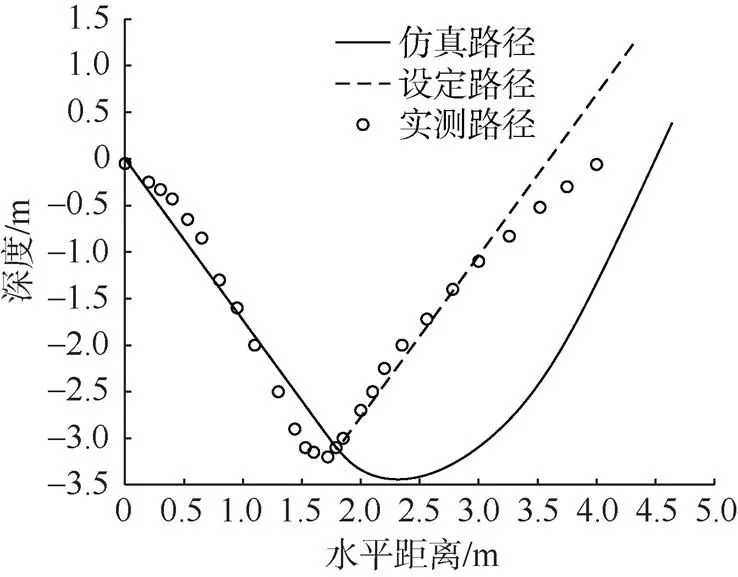
圖9 淺域水下滑翔機運動路徑對比
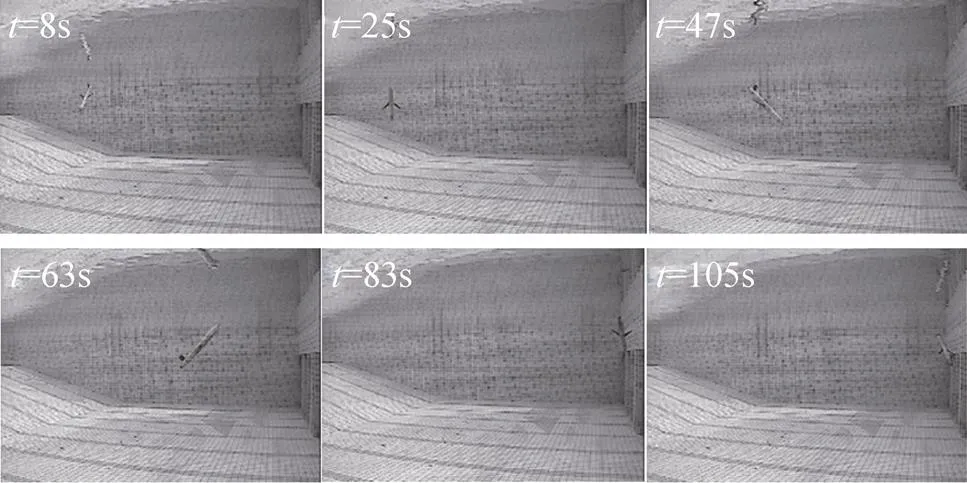
圖10 淺域水下滑翔機巡航回轉路徑

水池試驗驗證了該水下滑翔機的穩定性和快速俯仰調節的能力, 其具有較小的轉彎半徑。經過約40 min連續的水池巡航試驗, 再次測量電池的容量, 電池消耗了2.5 Ah的容量, 電池包由102節3.7 V, 3.4 Ah的18650電池組成, 總容量250 Ah, 則按此估計, 該水下滑翔機可連續運行約66 h, 達到長時間連續巡航的要求。
5 結束語
為解決滑翔機對淺水域環境的監控問題, 文中提出一種淺水域水下滑翔機設計方案, 該方案設計了基于絲桿副傳動裝置的可快速調節的單沖程浮力調節系統, 并在建立的淺域滑翔機動力學模型基礎上, 設計了LQR控制器, 實現了浮態切換的快速調節控制。其中, 基于絲桿副機構設計的浮力系統具有快速調節浮力的能力, 浮力調節系統布置于機體首部的形式可輔助滑翔機調節姿態, 進一步節省能源。
通過水池試驗的驗證, 研制的水下滑翔機機體最大潛深30 m, 具有出色的淺水域運動能力, 可以在3 m的深度內順利運行, 完成潛浮狀態的轉換, 轉彎半徑較小, 可達9 m, 能耗量小, 達到較小慣性延時滑翔深度的淺水域巡航需求, 完全滿足在淺水域穩定運行與順利巡航的要求。
目前的研究還存在不足之處, 如控制方法在滑翔機上的實際應用、淺水域環境因素如海水密度與海流對運動的影響等, 也是進一步待研究的內容。
[1] Stommel H. The SLOCUM Mission[J]. Oceanography, 1989, 2(1): 22-25.
[2] Sherman J, Davis R E, Owens W B, et al. The Autonomous Underwater Glider “Spray”[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 437-446.
[3] Eriksen C C, Osse T J, Light R D, et al. Seaglider: A long-range Autonomous Underwater Vehicle for Oceanographic Research[J]. IEEE Journal of Ocean- ic Engineering, 2001, 26(4): 424-436.
[4] Zhang S, Yu J, Zhang A, et al. Spiraling Motion of Underwater Gliders: Modeling, Analysis, and Experimental Results[J]. Ocean Engineering, 2013, 60: 1-13.
[5] Wang S, Sun X, Wang Y, et al. Dynamic Modeling and Motion Simulation for a Winged Hybrid-driven Underwater Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[6] Leonard N E, Graver J G. Model-based Feedback Control of Autonomous Underwater Gliders[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 633-645.
[7] Mahmoudian N, Woolsey C. Underwater Glider Motion Control[C]//47th IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 552-557.
[8] Bhatta P, Leonard N E. Nonlinear Gliding Stability and Control for Vehicles with Hydrodynamic Forcing[J]. Automatica, 2008, 44(5): 1240-1250.
[9] 楊海, 劉雁集, 張凱. 實驗尺度無人水下滑翔機設計與試驗[J]. 中國艦船研究, 2016, 11(1): 102- 107, 120.Yang Hai, Liu Yan-ji, Zhang Kai. Design and Experiment for Laboratory-scale Autonomous Underwater Gliders[J]. Chinese Journal of Ship Research, 2016, 11(1): 102-107, 120.
[10] Zhang F, Thon J, Thon C, et al. Miniature Underwater Glider: Design and Experimental Results[J]. IEEE/ ASME Transactions on Mechatronics, 2014, 19(1): 394-399.
[11] Graver J G. Underwater Gliders: Dynamics, Control and Design[D]. USA: Princeton University, 2005.
[12] Yu J C, Zhang A Q, Jin W M, et al. Development and Experiments of the Sea-Wing Underwater Glider. China Ocean Engineering[J]. China Ocean Engineering, 2001, 25(4): 721-736.
[13] 劉雁集. 水下滑翔機運動特性與路徑規劃研究[D]. 上海: 上海交通大學, 2018.
Design and Performance Analysis of an Underwater Glider for Shallow Water
CHEN Meng-wei1, LIU Yan-ji2
(1. Shanghai Industrial Technology Institute, Shanghai 201206, China; 2. Merchant Marine College, Shanghai Maritime University, Shanghai 201306, China)
For monitoring shallow water environment, an underwater glider for shallow water was designed. The effect of the coupling mode of the pitch and buoyancy mechanism adjustment and the pitch angle on the overall performance of the glider was analyzed. A single stroke buoyancy regulating system based on screw pair transmission device was designed, and the fin rudder adjustment device was used to realize the turning adjustment of the glider body. Moreover, a dynamic model of glider running in shallow water was established, a linear quadratic regulator(LQR) controller was designed, the weight parameters of the controller were determined, and the fast control of buoyancy state switching was realized by comprehensively considering the state variables of the moving parts inside the glider body. At last, the performance of the glider was tested in a water tank, and the result shows that this underwater glider can run smoothly in the depth range of 3 m with a small turning radius of 9 m, which meets the requirements of stable operation and smooth cruise in shallow water.
underwater glider; shallow water; dynamic model; tank test
陳孟偉, 劉雁集. 淺域水下滑翔機設計及性能分析[J]. 水下無人系統學報, 2019, 27(1): 59-64.
TJ6; U665; TP24
A
2096-3920(2019)01-0059-06
10.11993/j.issn.2096-3920.2019.01.010
2018-06-13;
20018-11-19.
上海市經濟和信息化委員會專項資金項目資助(JJ-YJCX-01-17-1893).
陳孟偉(1993-), 男, 本科, 主要研究方向為過程自動化技術.
(責任編輯: 楊力軍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
